第四章(2) 一般二次曲面的研究(课件)
合集下载
第四章(2) 一般二次曲面的研究(课件)
例 利用坐标变换,化简二次曲面的方程. 利用坐标变换,化简二次曲面的方程.
−2 x 2 + y 2 + z 2 + 4 xy + 4 xz + 8 yz + 1 = 0
解 Φ ( x , y , z ) = −2 x 2 + y 2 + z 2 +4 xy + 4 xz + 8 yz
=(x y
−2 2 2 x z ) 2 1 4 y 2 4 1 z ↑ A证来自Aα1 = λ α 1
Aα 2 = λ α 2
A ( k1α1 + k2α 2 ) = A( k1α1 ) + A( k2α 2 ) = k1 ( Aα1 ) + k2 ( Aα 2 )
= k1(λ α1 ) + k2 (λα 2 ) = ( k1λ )α1 + ( k2λ )α 2 = ( λ k1 )α1 + (λ k2 )α 2 = λ ( k1α1) +λ ( k2α 2 ) = λ ( k1α1 + k2α 2 ) = 又 k1α1 + k2α 2 ≠ o ∴ k1α1 + k2α 2 也是矩阵A的 对应于λ的特征向量. 也是矩阵 矩阵A 对应于λ的特征向量.
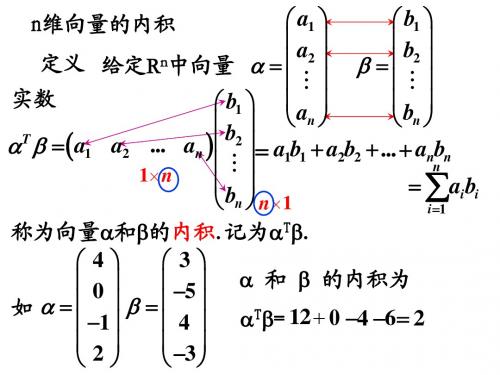
a1 b1 a b 定义 给定Rn中向量 α = 2 β = 2 给定R M M 实数 b1 an bn b T α β = ( a1 a2 ... an ) 2 = a1b1 + a2b2 + ... + anbn M n 1× n = ∑ ai bi bn n × 1 i =1
二次曲面【高等数学PPT课件】

(一)椭球面
x2 a2
y2 b2
z2 c2
1(
x
a,
y
b,
z
c)
椭球面与三个坐标面的交线:
x
2
a
2
y2 b2
1,
z 0
z
x2 a2
y
0
z2 c2
1,
z
y2 b2
z2 c2
1.
x 0
z
o
o
y
y
y
x
x
x
(二)双曲面
第八节 二 次 曲 面
二次曲面的定义:
a11 x2 a22 y2 a33 z2 2a12 xy 2a23 yz
2a13 xz 2a14 x 2a24 y 2a34z a44 0
三元二次方程所表示的曲面称为二次曲面.
相应地平面被称为一次曲面.
用坐标面和平行于坐标面的平面与曲面 相截,考察其交线的形状,然后加以综合, 从而了解曲面的全貌.
z
z
z
o
y
o
x oy x
y x
z x2 y2 y x2 z2
x y2 z2
(2)
双曲抛物面 (马鞍面)
x2 y2
z( p 与 q 同号)
pq
z
o x
z o x
y
z x>0x<0
o y
y x
x2 y2 z
pq
y>0
y<0
x2 y2 z
第四章_二次曲线与二次曲面
如图4.1,因为 因为 如图
e2
M
o′
e1
o
′ e2
图4.1
OM = OO ' + O ' M
' ' = ( x0 e1 + y0 e2 ) + ( x 'e1 + y 'e2 )
= x0 e1 + y0 e2 + x ′(a11e1 + a21e2 ) + y′(a12 e1 + a22 e2 )
l1 : 2 x − y + 3 = 0 在新坐标系中的方程为
x′ − 2 y′ + 4 = 0 . 即 从σ 2 到 σ 1 的点的坐标变换公式为 4 3 x ′ 5 5 x − 1 y′ = . 4 y − 1 − 3 5 5
′ ′ ′ ( e1 , e 2 , e 3 ) = ( e1 , e 2 , e 3 ) a 21 a 22 a 23 a 31 a 32 a 33
其中矩阵A=( σ 1 )称为从 到 的过渡矩阵,,且是可逆的。 的过渡矩阵,且是可逆的。 其中矩阵 称为从 σ2 ( x, y z ), x ' , y ' , z ' 设点M在 σ1 , 设点 在 和 ( x0 , y0 , z0 ) 下的坐标分别为 σ 1 σ 2 a O’在(a1 , a 2 , a 3 ), (a1 , a′ , a′ ), 在 下的坐标为 2 3 ,向量 在 和 下的坐标分 ′ 别为 那么使用平面的坐标变换公式 的推导方法可以得到
因此
u = a11 u′ + a 21v ′ v = a12 u′ + a 22 v ′
e2
M
o′
e1
o
′ e2
图4.1
OM = OO ' + O ' M
' ' = ( x0 e1 + y0 e2 ) + ( x 'e1 + y 'e2 )
= x0 e1 + y0 e2 + x ′(a11e1 + a21e2 ) + y′(a12 e1 + a22 e2 )
l1 : 2 x − y + 3 = 0 在新坐标系中的方程为
x′ − 2 y′ + 4 = 0 . 即 从σ 2 到 σ 1 的点的坐标变换公式为 4 3 x ′ 5 5 x − 1 y′ = . 4 y − 1 − 3 5 5
′ ′ ′ ( e1 , e 2 , e 3 ) = ( e1 , e 2 , e 3 ) a 21 a 22 a 23 a 31 a 32 a 33
其中矩阵A=( σ 1 )称为从 到 的过渡矩阵,,且是可逆的。 的过渡矩阵,且是可逆的。 其中矩阵 称为从 σ2 ( x, y z ), x ' , y ' , z ' 设点M在 σ1 , 设点 在 和 ( x0 , y0 , z0 ) 下的坐标分别为 σ 1 σ 2 a O’在(a1 , a 2 , a 3 ), (a1 , a′ , a′ ), 在 下的坐标为 2 3 ,向量 在 和 下的坐标分 ′ 别为 那么使用平面的坐标变换公式 的推导方法可以得到
因此
u = a11 u′ + a 21v ′ v = a12 u′ + a 22 v ′
第4章二次曲面的一般理论
c11 其中T c21 c 31
c12 c22 c3 c31 1, c11c12 c21c22 c31c32 0 2 2 2 c12 c22 c32 1, c12c13 c22c23 c32c33 0 2 2 2 c13 c23 c33 1, c11c13 c21c23 c31c33 0
四、转轴变换
设 {O; i , j , k }及 {O; i , j , k }两个直角坐标系 新坐标系可以看成原坐标系 绕原点O旋转, 使得i , j , k分别与i , j , k 重合得到的, 这种坐标变换叫旋转变 换,简称转轴
设i , j , k 在直角坐标系 Oxyz中的方向角分别为 i, i, i;i 1,2,3
六个关系式为正交的条件,则T也是正交矩阵 则T 1 T T
{O; i , j , k }及{O; i , j, k }都是右手系 ( i , j , k ) ( i , j , k ) 1
c11 det T c21 c31 c12 c22 c32 c13 c23 1 c33
y(c12 i c22 j c32 k ) z (c13 i c23 j c33 k ) ( x0 c11 x c12 y c13 z )i ( y0 c21 x c22 y c23 z ) j ( z0 c31 x c32 y c33 z )k
原方程可化为: 3x2
2 3z2 27 0 3y
例4、讨论曲面4 x 2 y 2 8z 2 8 yz 4 xz 4 xy 8 x 4 y 4 z 4 0的形状
解:把所给方程改写为:
4( x 1)2 y 2 8z 2 8 yz 4( x 1)z 4( x 1) y 0
《I二次曲面介绍》课件
二次曲面的切线和法平面
1
切线
切线方程式是确定点切线方向的关键工具,可以帮助我们理解二次曲面的基本特 征。
2
法平面
法平面相切于曲面上的点,并垂直于该点的切线,是描述曲面矢量值和方向的基 本方法。
3
应用
对于计算两个表面之间的夹角和反射光线,有着应用上的力量,也是了解曲面空 间特征的重要手段。
二次曲面的焦点和准线
《二次曲面介绍》PPT课 件
欢迎来到《二次曲面介绍》课程!二次曲面是数学中一个重要的概念,也具 有广泛应用。在此课程中,我们将深入了解二次曲面的分类、性质、公式和 应用,希望你享受这次学习!
什么是二次曲面?
定义
由二元二次方程$x^2+y^2+z^2+ax+by+cz+d=0$所确定的曲面称为一般二次曲面。
工程领域
2
对于数学知识结构的完备和优化起着重 要的推进作用。
在多种物理和工程应用中,二次曲面有
着广泛的实际用途。谷歌、苹果等大型IT
公司也在开发利用二次曲面技术的产品。
3
学术研究
二次曲面仍然是数学与物理学研究领域 的重要研究对象,对未来科学教育的贡 献巨大。
二次曲面的实践应用案例分析
医学成像
二次曲面在体绘制和定义了新 的医学成像方法。它可以为医 师提供三维数据,从而进行更 高质量的检查和诊断。
二次曲面的思考与总结
1 对数学的重要性
了解二次曲面的形式,有助于人们理解和应用数学知识,可以使数学这一抽象的学科更 加形象化、通透化。
2 对科学的启示
二次曲面的理论和应用研究有助于开拓科学领域的新思路,推动科学的不断发展和进步。
3 对未来的期许
线性代数之二次曲面PPT课件
的方向为z 轴的正向.取t 为参数,
t 0时, 点M位于A(a,0,0)处. 经过
时间t, 动点运动到Mt(x,y,z).
设M '为 M t在xoy面上的投影
M'(x, y,0), AOM't
于是xyaacsoins((tt))
.
A
O。 M t
M'
x
y
27
xacos(t) 该曲线参数方程为:yasin(t)
8.4 空间中的曲面与曲线
曲面(曲线)方程: 1. 曲面(曲线)上的任一点的坐标都满足该
方程. 2. 坐标满足方程的点都在该曲面(曲线)上.
.
1
这一节我们主要研究: 1. 球面 2. 柱面 3. 旋转曲面
一 、 空 间 曲 线 的 一 般 方 程 4.空 间 曲 线 二 、 空 间 曲 线 的 参 数 方 程
zvt
称 此 曲 线 为 螺 旋 线
.
28
三、空间曲线在坐标面上的投影
投 影 曲 线设 C 是 一 条 空 间 曲 线 , 是 一 个 平 面 , 以 C 为 准 线 ,作 母 线 垂 直 与 的 柱 面 ,称 该 柱 面 与 平 面 的 交 线 为 C 在 平 面 上 的 投 影 曲 线 ,简 称 投 影 .
解:z不动,用 x2y2替代zky中的y得
z
zk x2 y2
即
x2 y2
z2 k2
0
o
圆锥面:直线L绕另一条与L相交的直
y
半 顶 角 : 两 线直 旋线 转的 夹 一角 周 所( 得0 的 旋转 面) x 2
.
16
.
17
例 求 双 曲 线 a x2 2b z2 2 1绕 x轴 旋 转 一 周 所 得 曲 面 的 方 程 y0
解析几何ppt第4章二次曲面的总结
4、椭球面
5、双曲面
它们都是中心二次曲面 它们的方程可以写成统一的形式:
Ax2 By2 Cz 2 1, ABC 0 .
(1)
当三平方项系数 A, B, C 均为正时,(1)表示椭球面;
当三平方项系数 A, B, C 中有两项为正,另一项为负,(1) 表示单叶双曲面;
当三平方项系数 A, B, C 中只有一项为正,另两项为负,(1) 表示双叶双曲面;
柱面锥面特例旋转曲面球面判别法重点常规方法求曲面方程旋转曲面的方程直接写出在空间直角坐标系中只含有两个元坐标的三元方程在空间直角坐标系中只含有两个元坐标的三元方程所表示的曲面是一个柱面它的母线平行于所所表示的曲面是一个柱面它的母线平行于所缺元缺元坐标坐标的同名坐标轴
CH4 二次曲面
柱面 锥面 特例 旋转曲面 球面
• 课本P147~148,习题1、2、8 • 课本P151,习题1、2、5 • 课本P158,习题1
非 直 纹 曲 面
椭球面 双叶双曲面 椭圆抛物面
Ax 2 By 2 Cz 2 1
A,B,C全正
Ax 2 By 2 Cz 2 1
A,B,C一正两负
Ax By 2 z AB 0
2 2
典型习题
3、旋转曲面判别法: “二个变量平方项的系数相同”
在空间直角坐标系中,当坐标面上的曲线绕此坐标面 里的一个坐标轴旋转时,为求得旋转曲面的方程,只需 将曲线方程保留与旋转轴同名的坐标,用其余两坐标平 方和的平方根代替方程中的另一个坐标。
“常规方法”求上述曲面(1、2、3)的方程
步骤: ⅰ) 写出这母线上任意一点 M1 x1, y1, z1 的纬圆方程 或母线族. ⅱ ) 写出参数 x1 , y1 , z1 的约束条件. ⅲ ) 消去参数得到所求旋转曲面的方程(或柱面、 锥面的方程).
二次曲面的分类PPT
双曲线,抛物线认为是同一类曲线)参见:尤承业《解析几何》P:275
x2 a2
y2 b2
2z
x2 y2 2z a2 b2
Thank you!
(11)
x2 a2
y2 b2
1
0;
(13) x2 y2 0; a2 b2
(15)x2 a2 0;
(17)x2 0.
x2 (12) a2
y2 b2
0;
(14)x2 2 py 0;
(16)x2 a2 0;
类似结论参见 P:201 Th5.5.6 (二次曲面关于正交变换的分类(即度量分类) )
x2 y2 (9) a 2 b 2 1 0;
x2 y2 z2 (2) a 2 b 2 c 2 1 0;
x2 y2 z2 (4) a 2 b 2 c 2 1 0;
x2 y2 z2 (6) a 2 b 2 c 2 0;
x2 y2 (8) a 2 b 2 2z 0;
x2 y2 (10 ) a 2 b 2 1 0;
二次曲面分类
胡努春
浙江师范大学数学系 course.zjnu/hnc
二次曲面方程的化简和分类 ( ) P:130 Th4.2.2; P:133 Th4.3.1
定理 适当选取坐标系,二次曲面的方程总可 以化成下列五个简化方程中的一个:
(1) a11x2 a22y2 a33z2 a44 0,a11a22a33 0; (2) a11y2 a22y2 2a34z 0,a11a22a34 0; (3) a11x2 a22y2 a44 0,a11a22 0; (4)a11x2 2a24y 0,a11a24 0; (5)a11x2 a44 0,a11 0.
的锥面方程
z 1
x2 a2
y2 b2
2z
x2 y2 2z a2 b2
Thank you!
(11)
x2 a2
y2 b2
1
0;
(13) x2 y2 0; a2 b2
(15)x2 a2 0;
(17)x2 0.
x2 (12) a2
y2 b2
0;
(14)x2 2 py 0;
(16)x2 a2 0;
类似结论参见 P:201 Th5.5.6 (二次曲面关于正交变换的分类(即度量分类) )
x2 y2 (9) a 2 b 2 1 0;
x2 y2 z2 (2) a 2 b 2 c 2 1 0;
x2 y2 z2 (4) a 2 b 2 c 2 1 0;
x2 y2 z2 (6) a 2 b 2 c 2 0;
x2 y2 (8) a 2 b 2 2z 0;
x2 y2 (10 ) a 2 b 2 1 0;
二次曲面分类
胡努春
浙江师范大学数学系 course.zjnu/hnc
二次曲面方程的化简和分类 ( ) P:130 Th4.2.2; P:133 Th4.3.1
定理 适当选取坐标系,二次曲面的方程总可 以化成下列五个简化方程中的一个:
(1) a11x2 a22y2 a33z2 a44 0,a11a22a33 0; (2) a11y2 a22y2 2a34z 0,a11a22a34 0; (3) a11x2 a22y2 a44 0,a11a22 0; (4)a11x2 2a24y 0,a11a24 0; (5)a11x2 a44 0,a11 0.
的锥面方程
z 1
微积分课件第4节 二次曲面

第四节 二次曲面
思考题1解答
4 y 2 z 2 16 x 4 y z 25 . x 3 x 3
2 2 2
表示双曲线.
练 习 题
一、 填空题: 1. 与 z 轴和点 A(1 , 3 ,1) 等距离的点的轨迹方程是 _____________; 2. 以点 O(2 ,2 , 1)为球心,且通过坐标原点的球面方程 是_______________; 3. 球面: x 2 y 2 z 2 2 x 4 y 4 z 7 0 的球心是点 ___________,半径 R __________; 4. 方程 x 2 在平面解析几何中表示___________,在空 间解析几何中表示___________________; 5. 方 程 x 2 y 2 4 在 平 面 解 析 几 何 中 表 示 _______________ , 在 空 间 解 析 几 何 中 表 示 _______________.
同理与平面 x x1 和y y1 的交线也是椭圆. 椭圆截面的大小随平面位置的变化而变化.
x2 y2 z2 2 2 1 椭球面 2 a b c
x y z 2.椭球面 (Ellipsoid) 2 2 2 1 a b c
椭球面的几种特殊情况:
2
2
2
x2 y2 z2 (1) a b, 2 2 1 旋转椭球面 2 a a c 2 2 x z 由椭圆 2 2 1 绕 z 轴旋转而成. a c 2 2 2 x y z 方程可写为 2 1 2 a c
5.椭圆抛物面
第四节 二次曲面
6.双曲抛物面(马鞍面)
(hyperbolic paraboloid)
生活中的二次曲面ppt课件
截痕
一点或椭圆 双曲线 双曲线
•
你有没有发现?
界在原个界面筑一杯到项生 里奇来事,构。架;一的活 。幻我物留成行飞大支二中
的们,心了行机到笔次还 曲一你身多色、一、曲有 面直会边彩色一辆一面各 的生发的的的座轿个,式 世活现每世曲建车茶小各
、
•
费马于1636年与当时的大数学家梅森、罗贝瓦尔开始通信,对自己的
数学工作略有言及。但是《平面与立体轨迹引论》的出版是在费马去世14年
以后的事,因而1679年以前,很少有人了解到费马的工作,而现在看来,费
马的工作却是开创性的。
•
《平面与立体轨迹引论》中道出了费马的发现。他指出:“两个未知
量决定的—个方程式,对应着一条轨迹,可以描绘出一条直线或曲线。”费
x2 y2 z2 a2 a2 c2 0
• 2、椭圆锥面:
x2 y2 z2 a2 b2 c2 0
• 吃过吧!
生活中的球面
• 1、球面:
x2y2z2a2
• 2、椭球面:
x2 y2 z2 a2 b2 c2 1
• 玩过吗?:-)
生活中的抛物面
• 1、椭圆抛物面:
x2 a2
y2 b2
z
• 2、双曲抛物面:
面、椭圆抛物面、双叶双曲面和椭球面,指出:含有三个未知量的方程表示
一个曲面,ห้องสมุดไป่ตู้对此做了进一步地研究
生活中的柱面
• 1、圆柱面:
x2 y2 a2
• 2、椭圆柱面:
x2 2py 0
• 3、双曲柱面:
x2 y2 1
a2 b2
• 4、抛物柱面:
x2 y2 1 a2 b2
生活中的锥面
• 1、圆锥面:
第4章 二次曲面和二次曲线
'
x cos - sin x x0 y sin cos y y . 0
若θ=0,则
x 1 y 0
0 x x0 x x0 y y y y , 1 0 0
如图4.1,因为
e2
M
o
e1
o
e2
4
图4.1
OM OO' O' M
' ' ( x0e1 y0e2 ) ( x'e1 y'e2 )
x0e1 y0e2 x(a11e1 a21e2 ) y(a12e1 a22e2 )
x0 a11 x ' a12 y ' e1 ( y0 a21 x a22 y )e2
即
)2 ( 3 y)2 2z , ( 6x x 2 y 2 2 z . 1 2 6
故S是双曲抛物面。
19
例3 在平面右手直角坐标系中,方程
x y 1 4 9
x 2 x , 得方程 x 2 y 2 1 已不能 表示椭圆,作变换 y 3 y
平面上给了两个仿射坐标系 1 {O; e1 , e2 }, 2
标之间的关系.设 O 在 1下的坐标为 ( x0 , y0 ), e1 , e2 在 1 下的坐标分别是 (a11 , a21 ), (a12 , a22 ), 点M在 1 和 2 下 的坐标分别为( x, y ) 和( x , y ). e1
(1.2)
x x0 a11 a12 x a a y y0 21 22 y
x cos - sin x x0 y sin cos y y . 0
若θ=0,则
x 1 y 0
0 x x0 x x0 y y y y , 1 0 0
如图4.1,因为
e2
M
o
e1
o
e2
4
图4.1
OM OO' O' M
' ' ( x0e1 y0e2 ) ( x'e1 y'e2 )
x0e1 y0e2 x(a11e1 a21e2 ) y(a12e1 a22e2 )
x0 a11 x ' a12 y ' e1 ( y0 a21 x a22 y )e2
即
)2 ( 3 y)2 2z , ( 6x x 2 y 2 2 z . 1 2 6
故S是双曲抛物面。
19
例3 在平面右手直角坐标系中,方程
x y 1 4 9
x 2 x , 得方程 x 2 y 2 1 已不能 表示椭圆,作变换 y 3 y
平面上给了两个仿射坐标系 1 {O; e1 , e2 }, 2
标之间的关系.设 O 在 1下的坐标为 ( x0 , y0 ), e1 , e2 在 1 下的坐标分别是 (a11 , a21 ), (a12 , a22 ), 点M在 1 和 2 下 的坐标分别为( x, y ) 和( x , y ). e1
(1.2)
x x0 a11 a12 x a a y y0 21 22 y
空间解析几何 第四章一般二次曲线与二次曲面
第四章一般二次曲线与二次曲面这一章讨论用一般方程给出的二次曲线,在适当选取的坐标系中可以把它们的一般方程化成标准方程,从而达到判断一般方程所表示的曲线的类型与位置的目的。
其次用不变量对二次曲线与二次曲面进行分类。
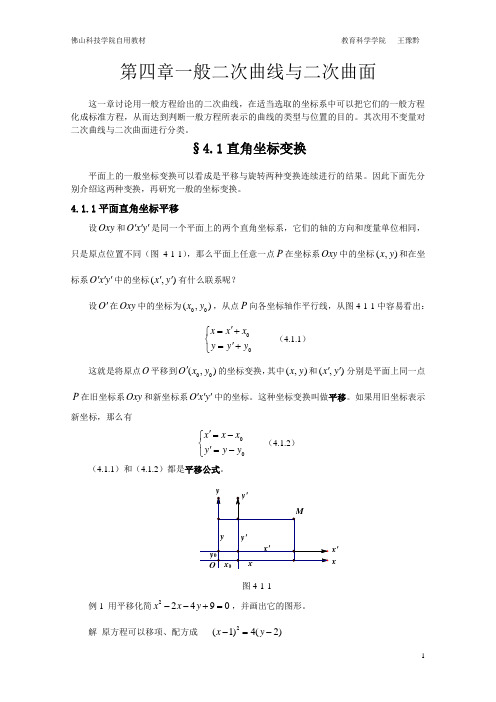
§4.1直角坐标变换平面上的一般坐标变换可以看成是平移与旋转两种变换连续进行的结果。
因此下面先分别介绍这两种变换,再研究一般的坐标变换。
4.1.1平面直角坐标平移设Oxy 和O x y '''是同一个平面上的两个直角坐标系,它们的轴的方向和度量单位相同,只是原点位置不同(图4-1-1),那么平面上任意一点P 在坐标系Oxy 中的坐标(,)x y 和在坐标系O x y '''中的坐标(,)x y ''有什么联系呢?设O '在Oxy 中的坐标为00(,)x y ,从点P 向各坐标轴作平行线,从图4-1-1中容易看出:x x x y y y '=+⎧⎨'=+⎩ (4.1.1) 这就是将原点O 平移到00(,)O x y '的坐标变换,其中(,)x y 和(,)x y ''分别是平面上同一点P 在旧坐标系Oxy 和新坐标系O x y '''中的坐标。
这种坐标变换叫做平移。
如果用旧坐标表示新坐标,那么有x x x y y y '=-⎧⎨'=-⎩ (4.1.2) (4.1.1)和(4.1.2)都是平移公式。
x'x图4-1-1例1 用平移化简22490x x y --+=,并画出它的图形。
解 原方程可以移项、配方成 2(1)4(2)x y -=-将原点O 移到(1,2)O ',即作平移:12x x y y '=-⎧⎨'=-⎩那么,在新坐标系O x y '''中,方程简化成24x y ''=。
解析几何全册课件
e
e
上一页
下一页
返回
例5 证明四面体对边中点的连线交于一点,且互相平分.
A
B
C
D
E
F
P1
e1
e2
e3
.
,
,
3
2
1
叫做空间向量的基底
这时
e
e
e
.
,
,
,
.
,
,
,
,
,
,
,
,
3
2
1
1
3
2
1
3
2
1
3
2
1
关系式
线性表示的
,
,
用
先求
取不共面的三向量
就可以了
三点重合
下只需证
两组对边中点分别为
其余
它的中点为
§1.5 标架与坐标
§1.7 两向量的数量积
§1.9 三向量的混合积
§1.8 两向量的向量积
第二章 轨迹与方程
§2.1 平面曲线的方程
§2.2 曲面的方程
§2.3 空间曲线的方程
第三章 平面与空间直线
§3.1 平面的方程
§3.3 两平面的相关位置
1
2
1
2
2
1
1
2
1
2
1
关的向量叫做线性无关
性相
叫做线性相关,不是线
个向量
那么
(
=
使得
个数
在不全为零的
,如果存
个向量
对于
定义
n
n
n
n
n
a
a
a
n
a
e
上一页
下一页
返回
例5 证明四面体对边中点的连线交于一点,且互相平分.
A
B
C
D
E
F
P1
e1
e2
e3
.
,
,
3
2
1
叫做空间向量的基底
这时
e
e
e
.
,
,
,
.
,
,
,
,
,
,
,
,
3
2
1
1
3
2
1
3
2
1
3
2
1
关系式
线性表示的
,
,
用
先求
取不共面的三向量
就可以了
三点重合
下只需证
两组对边中点分别为
其余
它的中点为
§1.5 标架与坐标
§1.7 两向量的数量积
§1.9 三向量的混合积
§1.8 两向量的向量积
第二章 轨迹与方程
§2.1 平面曲线的方程
§2.2 曲面的方程
§2.3 空间曲线的方程
第三章 平面与空间直线
§3.1 平面的方程
§3.3 两平面的相关位置
1
2
1
2
2
1
1
2
1
2
1
关的向量叫做线性无关
性相
叫做线性相关,不是线
个向量
那么
(
=
使得
个数
在不全为零的
,如果存
个向量
对于
定义
n
n
n
n
n
a
a
a
n
a
相关主题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
证
Aα1 = λ α 1
Aα 2 = λ α 2
A ( k1α1 + k2α 2 ) = A( k1α1 ) + A( k2α 2 ) = k1 ( Aα1 ) + k2 ( Aα 2 )
= k1(λ α1 ) + k2 (λα 2 ) = ( k1λ )α1 + ( k2λ )α 2 = ( λ k1 )α1 + (λ k2 )α 2 = λ ( k1α1) +λ ( k2α 2 ) = λ ( k1α1 + k2α 2 ) = 又 k1α1 + k2α 2 ≠ o ∴ k1α1 + k2α 2 也是矩阵A的 对应于λ的特征向量. 也是矩阵 矩阵A 对应于λ的特征向量.
−2 2 2 x ( x y z ) 2 1 4 y = −1 −2 3−25 1 2 4 1 z 5 3 1 −4 2 Q = 5 3 5 3 Q为正交矩阵. 为正交矩阵. −3 0 0 0 3 2 T 且 Q = 1, Q AQ = 0 −3 0 5 3 0 0 6 x x′ 2 −2 作转轴变换 y = Q y′ , 即 ′− ′ + 1 z′ x y x = z z′ 5 3 5 3 −2 1 1 4 −2 2 ′ x 5 3 5 3 x x′ − y′ + z′ y= 3 5 3 5 y = 1 −4 2 y ′ 5 3 5 3 3 2 z y′ + z′ 2 z′ 3 z = 0 3 5 5 3
a1 b1 a b 定义 给定Rn中向量 α = 2 β = 2 给定R M M 实数 b1 an bn b T α β = ( a1 a2 ... an ) 2 = a1b1 + a2b2 + ... + anbn M n 1× n = ∑ ai bi bn n × 1 i =1
x2 − x3 = 0 −2 x1 − 4 x2 + 5 x3 = 0
1 是对应于6 2 是对应于6的 特征向量. 特征向量. 2
用坐标变换化简方程
− A的特征值: 3, −3,6 的特征值:
(x
γ
−2 λ = −3 : α 1 = 1 , α1 , γ α 2 0
用坐标变换化简方程
−2 2 2 x ( x y z ) 2 1 4 y = −1 2 4 1 z −2 1 −2 5 3 5 3 ↑ 1 −4 2 Q为正交矩阵. A Q = 5 3 5 3 为正交矩阵. −3 0 0 T 0 3 2 且 Q = 1, Q AQ = 0 −3 0 5 3 0 0 6 x x′ 作转轴变换 y = Q y′ , 曲面方程化为 z z′ −3 0 0 x ′ x′ y′ = −1, ( x′ y′ z′ ) 0 −3 0 y′ T 即 ( x′ y′ z ′ ) Q A Q 0 0 6 z′ z′ = −1,
−2 1 β 2 = α 2 − 4 β 11 = − 4 α 5 λ = −3 : β 1 = α1 = 5 1 0 β 1 ⊥ β 2 , γ ⊥ β 1 , γ ⊥ β 2 , 再将 β 1 , β 2 , γ 单位化. 单位化.
−2 ( x y z ) 2 −3, −3,6 的特征值: A的特征值: 2 2 − 5 −2 λ = −3 : β 1 = 1 , β 2 = − 4 λ 5 1 0 −2 令 −2 3 5 5 15 1 1 −4 β 2 = , η1 = β1 = 5 , η2 = 3 5 β2 β5 3 1 5 0 3 对应于 λ = −3 η1,η2 ,η3 为两两正交的单位向量. 两两正交的单位向量. 单位向量
n维向量的内积
称为向量α 称为向量α和β的内积.记为αTβ. 内积.记为α
4 3 0 −5 如 α = β = −1 4 −3 2
α 和 β 的内积为 αTβ= 12 + 0 −4 −6 = 2
n维向量的正交 =0,则称 则称α 正交. α , β ∈ R n 如果 αTβ=0,则称α与β正交. 定义 设
二次曲面的方程可写为
(x
−2 2 2 x y z ) 2 1 4 y = −1 2 4 1 z
−2 2 2 x 用坐标变换化简方程 ( x y z ) 2 1 4 y = −1 2 4 1 z −2 −2 λ +2 λ+2 −2 − 2 λ E − A = −2 λ −1 − 4 λ − 1 −4 = −2 0 −λ − 3 λ + 3 −2 − 4 λ −1 λ + 2 − 4 −2 λ + 2 −4 = −2 λ − 5 −4 = (λ + 3) −2 λ − 5 0 0 λ+3
3
η1,η2 ,η3 为两两正交的单位向量. 令 两两正交的单位向量 单位向量.
1 Q = 5 0
−2 5
−2 3 5 −4 3 5 3 5
3
1 3 2 3 2 3
Q为正交矩阵. 为正交矩阵. −3 0 0 Q = 1, Q −1 AQ = 0 −3 0 且 T Q AQ = 0 0 6
α β =0 α与β正交 α = ( 2, 0, −3, 1, 4 )T , β = ( −1, 2, 2, 0, 2)T 例如 α T β = 0 ∴α β β = (b1,b2 ,b3 ) 3中, 在R 设 α = (a1,a2,a3 )≠ o β = (b1,b2 ,b3 )≠ o θ α = (a1,a2 ,a3 ) o 的内积为 则α和β的内积为
T
α T β = a1b1 + a2b2 + a3b3= α β cosθ
α β
θ=
π
2
αT β = 0
结论1 结论1 若α 证 α lβ
β , 则对任何实数k,l,有 kα l β ,
αTβ = 0
( kα )T ( l β ) = k l (α T β ) = 0
β
β
kα
lβ
α
1
kα
, 为正交向量组, 结论2 结论2 若α1, α2,…,αs 为正交向量组, 则
− A的特征值: 3, −3,6 的特征值:
λ = −3
3 ( −λ E −A) X = o
−1 −2 −2 x1 0 x = 0 −2 −4 −4 2 −2 −4 −4 x 0 3
− x1 − 2 x2 − 2 x3 = 0
α1
α1 ,
1
α2
α 2 ,..,
1
αs
α s 是正交单位向量组. 是正交单位向量组. 单位向量组
结论3 结论3 若 α
( kα + l β )
γ, β γ
T
γ , 则对任何实数k,l, 有 ,
γ , ∴ β γ = 0,
T
证 Qα
T
γ , ∴ α γ = 0, Q β
γ = ( kα )T + ( l β )T γ = ( kα )T γ + ( l β )T γ ( kα + l β ) = k (α T γ ) + l ( β T γ ) = 0 γ
∴ ( kα + l β )
γ
α
kα
β
kα + l β
lβ
为矩阵A的特征值, 非零向量α 非零向量α1 α2 都是 结论4 结论4 设λ为矩阵A的特征值, 矩阵A 对应于λ的特征向量, 矩阵A的 对应于λ的特征向量,则当k1α1 + k2α 2 ≠ o 时,
k1α1 + k2α 2 也是矩阵A的 对应于λ的特征向量. 也是矩阵 矩阵A 对应于λ的特征向量.
−2 2 2 x y z ) 2 1 4 y = −1 2 4 1 z 1 −2 α2 = 0 , λ = 6 : γ = 2 2 1
2 − 5
将 α1,α 2 正交化. 令 正交化.
用坐标变换化简方程
2 2 x y 1 4 = −1 4 1 z 1 γ = 2 = 6: 2
1 3 1 η3 = γ =2 3 γ3 2 3
对应于λ = 6
用坐标变换化简方程
−2 2 2 x ( x y z ) 2 1 4 y = −1 −3, −3,6 −2 的特征值: A的特征值: 2 4 1 z 1 3 5 −2 5 3 −4 1 η2 = 3 5 λ = −3 : η1 = 5 , 2 λ = 6: γ = 3 5 2 0
= ( λ + 3) [ (λ + 2)(λ − 5) − 8 ] = (λ + 3) (λ 2 − 3λ −18)
= (λ + 3)(λ + 3) (λ − 6)
− A的特征值: 3, −3,6 的特征值:
−2 2 2 x 用坐标变换化简方程 ( x y z ) 2 1 4 y = −1 2 4 1 z 2 λ E − A = ( λ + 3) ( λ − 6)