自适应滤波器原理32页PPT
自适应滤波器原理
自适应滤波器原理
自适应滤波是一种数字或电子信号处理策略,它通过动态识别和过滤器参数调整来有效地减少噪声并增强信号。
自适应滤波器可以通过减少滤波器内部增益以及解调器参数的调节来减少噪声,而不会损害信号的特性。
自适应滤波器的基本原理是,当信号的特征发生变化时,滤波器根据信号的特性更新自身参数进行实时调整。
它们通过改变滤波器的内部增益、改变滤波器的极点频率以及调整解调器的参数来达到该目的。
在不断更新这些参数的同时,自适应滤波器还能够根据信号特性调整滤波器的阻尼和贴合性。
具有优点的自适应滤波器是在非常复杂的环境中,例如畸变、多普勒及外界信号等,滤波器可以自动改变,从而保持正确的输出。
此外,它可以根据信号的参数改变,这使得其比其他基于一个固定设置的滤波器更加灵活和适应性更强。
自适应滤波器在各种方面均有所发挥,例如磁共振成像模型、数据处理,甚至电信领域等。
在这些领域中,可以借助自适应滤波技术减少背景噪声,有效提高信号质量,加速数据传输速度等。
自适应滤波器原理全解PPT文档共62页

66、节制使快乐增加并使享受加强。 ——德 谟克利 特 67、今天应做的事没有做,明天再早也 是耽误 了。——裴斯 泰洛齐 68、决定一个人的一生,以及整个命运 的,只 是一瞬 之间。 ——歌 德 69、懒人无法享受休息之乐。——拉布 克 70、浪费时间是一6、人民应该为法律而战斗,就像为 了城墙 而战斗 一样。 ——赫 拉克利 特 17、人类对于不公正的行为加以指责 ,并非 因为他 们愿意 做出这 种行为 ,而是 惟恐自 己会成 为这种 行为的 牺牲者 。—— 柏拉图 18、制定法律法令,就是为了不让强 者做什 么事都 横行霸 道。— —奥维 德 19、法律是社会的习惯和思想的结晶 。—— 托·伍·威尔逊 20、人们嘴上挂着的法律,其真实含 义是财 富。— —爱献 生
自适应滤波器介绍及原理
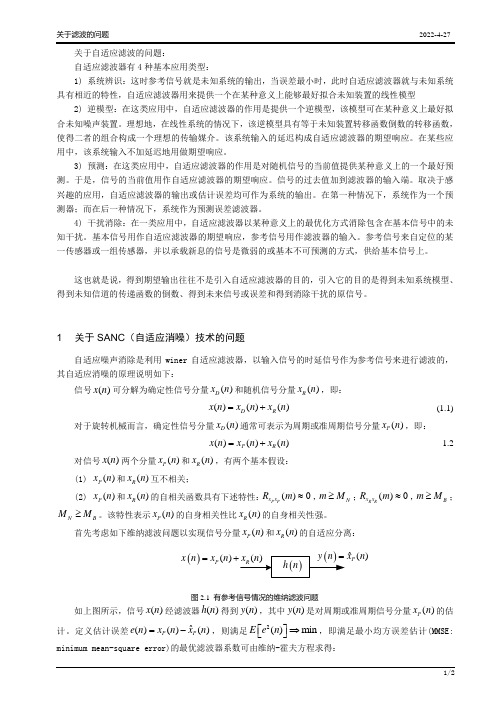
关于自适应滤波的问题:自适应滤波器有4种基本应用类型:1) 系统辨识:这时参考信号就是未知系统的输出,当误差最小时,此时自适应滤波器就与未知系统具有相近的特性,自适应滤波器用来提供一个在某种意义上能够最好拟合未知装置的线性模型2) 逆模型:在这类应用中,自适应滤波器的作用是提供一个逆模型,该模型可在某种意义上最好拟合未知噪声装置。
理想地,在线性系统的情况下,该逆模型具有等于未知装置转移函数倒数的转移函数,使得二者的组合构成一个理想的传输媒介。
该系统输入的延迟构成自适应滤波器的期望响应。
在某些应用中,该系统输入不加延迟地用做期望响应。
3) 预测:在这类应用中,自适应滤波器的作用是对随机信号的当前值提供某种意义上的一个最好预测。
于是,信号的当前值用作自适应滤波器的期望响应。
信号的过去值加到滤波器的输入端。
取决于感兴趣的应用,自适应滤波器的输出或估计误差均可作为系统的输出。
在第一种情况下,系统作为一个预测器;而在后一种情况下,系统作为预测误差滤波器。
4) 干扰消除:在一类应用中,自适应滤波器以某种意义上的最优化方式消除包含在基本信号中的未知干扰。
基本信号用作自适应滤波器的期望响应,参考信号用作滤波器的输入。
参考信号来自定位的某一传感器或一组传感器,并以承载新息的信号是微弱的或基本不可预测的方式,供给基本信号上。
这也就是说,得到期望输出往往不是引入自适应滤波器的目的,引入它的目的是得到未知系统模型、得到未知信道的传递函数的倒数、得到未来信号或误差和得到消除干扰的原信号。
1 关于SANC (自适应消噪)技术的问题自适应噪声消除是利用winer 自适应滤波器,以输入信号的时延信号作为参考信号来进行滤波的,其自适应消噪的原理说明如下:信号()x n 可分解为确定性信号分量()D x n 和随机信号分量()R x n ,即:()()()D R x n x n x n =+(1.1) 对于旋转机械而言,确定性信号分量()D x n 通常可表示为周期或准周期信号分量()P x n ,即: ()()()P R x n x n x n =+ 1.2对信号()x n 两个分量()P x n 和()R x n ,有两个基本假设:(1) ()P x n 和()R x n 互不相关;(2) ()P x n 和()R x n 的自相关函数具有下述特性:()0P P x x R m ≈,N m M ≥;()0R R x x R m ≈,B m M ≥;N B M M ≥。
《自适应滤波器原理》课件
自适应滤波器原理:通过调整滤波 器的参数,使滤波器的输出接近期 望输出
减小稳态误差的方法:调整滤波器 的参数,使其更接近期望输出
添加标题
添加标题
添加标题
添加标题
稳态误差:滤波器在稳态条件下的 输出误差
性能优化:通过减小稳态误差,提 高自适应滤波器的性能
调整滤波器参数,如调整滤波 器阶数、调整滤波器系数等
军事领域:用于 雷达信号处理, 提高探测精度
工业领域:用于 机器故障诊断, 提高生产效率
深度学习算法:利用神经网络进行自适应滤波 强化学习算法:通过强化学习实现自适应滤波器的优化 遗传算法:利用遗传算法进行自适应滤波器的参数优化 模糊逻辑算法:利用模糊逻辑进行自适应滤波器的决策和控制
FPGA实现:利用FPGA的灵活性和并行性,实现自适应滤波器 ASIC实现:利用ASIC的高性能和低功耗,实现自适应滤波器 专用芯片实现:设计专用芯片,实现自适应滤波器 云计算实现:利用云计算平台的计算资源,实现自适应滤波器
特点:全局搜索能力强,收 敛速度快
原理:通过模拟鸟群觅食行 为,寻找最优解
应用:广泛应用于自适应滤 波器、神经网络等领域
优缺点:优点是简单易实现, 缺点是容易陷入局部最优解
采用快速傅里叶变 换(FFT)算法, 减少计算量
利用并行计算技术, 提高计算速度
采用稀疏矩阵算法 ,减少存储需求
采用低复杂度算法 ,如LMS算法,减 少计算量
挑战:如何提高自适应滤波器的性能和稳定性,降低成本,提高可靠性,以及如何应对新的应 用场景和需求。
汇报人:
,
汇报人:
01
02
03
04
05
06
添加标题
自适应滤波器:一种能够根据输入信号的变化自动调整滤波器参数 的滤波器
自适应滤波器原理

能够准确地描述非线性系统的动态特性,适用于各种非线性程度不 高的系统。
模型的缺点
对于强非线性系统,需要高阶Volterra级数才能准确描述,计算复 杂度较高。
基于神经网络实现非线性滤波
01
02
03
神经网络模型
通过训练大量数据来学习 非线性系统的输入与输出 关系,从而实现非线性滤 波。
模型的优点
度向量;更新滤波器权系数。
NLMS算法特点
03
收敛速度较LMS算法快,对输入信号统计特性变化较不敏感。
线性预测编码(LPC)技术应用
线性预测编码(LPC)技术
一种基于线性预测模型的编码方法,通过利用信号之间的相关性来减少冗余信息,达到 压缩数据的目的。
LPC在自适应滤波器中的应用
将LPC技术应用于自适应滤波器设计,可以利用输入信号的线性预测特性来提高滤波器 的性能。
未来发展趋势预测及挑战
深度学习与自适应滤波器 的结合
随着深度学习技术的不断发展 ,将深度学习与自适应滤波器 相结合,有望进一步提高滤波 器的性能,解决复杂环境下的 信号处理问题。
非线性自适应滤波器的研 究
目前大多数自适应滤波器都是 基于线性模型的,但在实际应 用中,信号往往具有非线性特 性。因此,研究非线性自适应 滤波器具有重要的理论意义和 实际应用价值。
MSE越小,说明滤波器输出信号与期 望信号越接近,滤波器的性能越好。 因此,在自适应滤波器设计中,通常 会通过优化算法来降低MSE。
收敛速度比较及影响因素研究
收敛速度定义
收敛速度是指自适应滤波器在迭代过程中,权值向量逐渐接近最优解的速度。收敛速度越快,滤波器在应对时变信号 时具有更好的跟踪性能。
收敛速度比较方法
自适应滤波器简介PPT课件

3
第3页/共31页
正交性原理
• 假设线性离散时间滤波器的输入x(n)和脉冲响应w(n)都是复数无穷序列, 则输出y(n)
y n wk*x n k n 1, 2, k 0
• 假设滤波器输入和期望响应都已经是零均值,估计误差和误差均方值为
en d n yn
间
的
状
态
转
移
• v1(n): M×1维向量,描绘状态转移中的加性过程噪声 • y(n):动态系统在时刻n的N×1维观测向量
• C(n): N×N维观测矩阵
• v2(n): N×1维向量,观测噪声向量
18
第18页/共31页
• 卡尔曼滤波问题可以叙述为:利用观测数据向量y(1),y(2),…,y(n) 对n≥1求状态向量x(i)的各个分量的最小二乘估计。根据i和n的不同取 值,卡尔曼滤波可用于: • 滤波(i=n),用n时刻及以前时刻的测量数据来估计n时刻的信息 • 平滑(1≤i≤n),用1~n时刻的全部数据来估计n以前某个时刻的 信息 • 预测(i>n),用n时刻及以前的测量数据来估计n+τ(τ>0)时刻的 信息
J Eene* n Ee2 n
• 为使均方误差最小,其梯度向量的所有元素应为零
J J
k J
ak
bk
0
k 0,1, 2,
wk ak bk
4
第4页/共31页
• 将均方误差表达式代入
k J
e n
E
ak
e*
n
e* n ak
en
en e* bk
n
e* n bk
e n
• 由估计误差的定义可知
《自适应滤波器》课件

自适应滤波器能够用于调制和解调信号,实现信号的调制、解调 、频偏校正等功能。
多径抑制
自适应滤波器能够抑制多径干扰,提高通信系统的传输质量和可 靠性。
自适应滤波器在图像处理中的应用
图像去噪
自适应滤波器能够去除图像中的噪声,提高图像的清晰度和质量。
图像增强
自适应滤波器能够通过增强图像的特定特征,如边缘、纹理等,提 高图像的可读性和识别率。
信噪比增益
比较自适应滤波器在输入信号中增强有用信号 、抑制噪声的能力。
计算复杂度
评估自适应滤波器实现所需的计算资源和时间,包括浮点运算次数、存储需求 等。
04
自适应滤波器的实现方法
递归最小二乘法
01
递归最小二乘法是一种常用的 自适应滤波算法,通过最小化 误差平方和来不断调整滤波器 系数,以达到最优滤波效果。
差分进化NLMS算法
结合差分进化算法,通过种群间的竞争与合 作,实现权值的并行优化,提高算法的收敛 速度。
改进的RLS算法
快速RLS算法
通过改进递推最小二乘法的迭代公式,减少 计算量和存储需求,提高算法实时性。
遗忘因子RLS算法
引入遗忘因子,对历史数据赋予逐渐减小的 权重,以提高算法对非平稳信号的处理能力
工作原理
自适应滤波器通过输入和输出信号的 迭代计算,不断调整其内部参数,以 实现最优滤波效果。
自适应滤波器的应用领域
01
信号处理
自适应滤波器广泛应用于信号处 理领域,如语音、图像和雷达信 号的处理。
02
03
通信
控制系统
在通信领域,自适应滤波器用于 降低噪声和干扰,提高通信质量 。
在控制系统中,自适应滤波器用 于估计系统状态,提高控制精度 和稳定性。
自适应滤波器原理

自适应滤波器原理自适应滤波器是一种能够根据输入信号的特性自动调整滤波参数的滤波器。
它可以根据输入信号的变化实时调整滤波器的参数,从而更好地适应不同的信号特性,提高滤波效果。
自适应滤波器在信号处理、通信系统等领域有着广泛的应用,能够有效地提高系统的性能和稳定性。
自适应滤波器的原理主要基于自适应信号处理的理论。
它利用输入信号的统计特性和滤波器的参数之间的关系,通过不断地调整滤波器的参数,使得滤波器的输出信号能够更好地逼近期望的输出信号。
这种自适应性能使得自适应滤波器能够适用于各种复杂的信号环境,具有很强的鲁棒性和适应性。
自适应滤波器的原理包括两个关键部分,自适应性能的评价和参数的调整。
自适应性能的评价通常采用误差信号的均方误差作为评价指标,通过比较滤波器的输出信号和期望的输出信号之间的差异来评价滤波器的性能。
参数的调整则是根据误差信号的大小和方向,利用适当的算法来不断地调整滤波器的参数,使得误差信号能够逐渐减小,从而实现滤波器的自适应性能。
自适应滤波器的参数调整通常采用的是梯度下降算法。
这种算法通过计算误差信号对滤波器参数的梯度,不断地调整参数的数值,使得误差信号能够逐渐减小,最终收敛到最优的参数数值。
梯度下降算法是一种非常有效的参数调整方法,能够在较短的时间内实现滤波器参数的收敛,提高滤波器的性能。
自适应滤波器的原理虽然比较复杂,但是在实际应用中却能够带来很多好处。
首先,自适应滤波器能够根据输入信号的特性自动调整滤波参数,适应不同的信号环境,提高滤波效果。
其次,自适应滤波器能够提高系统的稳定性和鲁棒性,能够更好地应对复杂的信号环境和噪声干扰。
最后,自适应滤波器能够提高系统的性能,使得系统能够更好地满足实际的应用需求。
总之,自适应滤波器是一种能够根据输入信号的特性自动调整滤波参数的滤波器,具有很强的适应性和鲁棒性。
它的原理基于自适应信号处理的理论,通过评价自适应性能和调整滤波器参数来实现滤波器的自适应性能。