地下铲运机设计
地下遥控铲运机动力传动系统设计
2 地 下 遥控 铲运 机 动力传 动 系统 方案 设计
根据 国内外相关 行业 的成功经验 ,地下遥控铲运 机动力
传动系统的设计 主要 有两种方案 : () 1 保留原有传 动系统 的主体结 构不 变 , 将控制方式改为 电控 , 然后再进行遥控化。如长沙矿山研究院在 电控铲运 机基
降低噪声和油耗 , 同时具备完善 的柴油机故障 自诊断功能。
结 合某 有色金 属 公 司的生 产实 力及 本次设 计 的主要 目
的 , 们采 用 了方 案 ( ) 我 2。
3 车 控和 遥控 方 式并存 的设计 思 想
铲运机上安装车控 / 遥控切换开关 , 进行 铲运 机操 控模式
摘 要 : 用 电喷 发 动机 , 成 了地 下遥 控 铲 运 机 的 动 力 传 动 系统 方 案 设 计 , 高 了动 力 性 及 燃 油 经 济 性 , 少 了排 气 污 染 , 高 了 工 采 完 提 减 提
作效率 , 并有利 于遥拄化 , 还提 出了车控 / 遥控并 存的控制 方式, 高 了系统的操作灵 活性及 可靠性 , 提 完成 了动力传动 系统的选型。
Eq i me t up n Ma u a t n e h  ̄o y No6, 0 0 n f cr g T c n g . 2 1 i
地 下遥控 铲 运 机ቤተ መጻሕፍቲ ባይዱ动 力传 动 设 计 系统
李 遵领 , 熊静 琪 , 锐 , 秋 瑞 孙 李
( 电子科技大学 , 四川 成 都 6 0 5 ) 104
() 2 具有优 良的起动性能 ; ( ) 气 阻力 小 、 3进 充气 量大 , 动力 性 明显 提高 , 动机 的 发
车控信号
受控对象
输出功率和转矩增大 ; () 4 燃烧更 加彻底 , 废气污染小 , 更环保 ;
KCY-4大型地下铲运机液压系统设计与计算
5 2
有 色 金 属( 矿山部分)
第 6 卷 3
系统 、 电器 系统 、 工作 装置 等组成 。工作 系统 采用反 转 六连杆 机构 , 结构 紧凑 , 获 得 较大 的铲 取力 ; 可 前 后 车架 中央铰 接 , 向系统 采用 双缸转 向的形 式 , 转 驾 驶 室布 置在后 车体 上 , 后桥 摆动 ; 制动 系统采 用弹簧 制 动液压 释放 的全盈 湿式制 动器 , 全 可靠 。 安
关键词 :m 地下铲运机 ; 4 液压 系统 ; 设计 ; 计算
中 图分 类 号 :I 2 4 TM2 . 文 献 标 识 码 : A 文 章 编 号 :6 1 4 7 (0 1 O — 0 1— 7 17 — 12 2 1 ) 1 0 5 0
D s n a d C lu ain o e Hy ru i y tm o Y- HD e i n ac lt ft d a lc S se frKC 4 L g o h
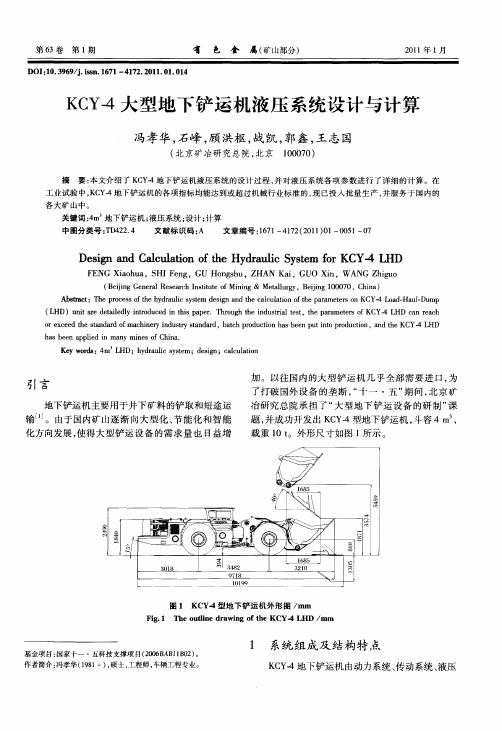
题, 并成 功开 发 出 K Y4型地下 铲运 机 , 容 4m , C- 斗
载重 1 。外 形尺 寸如 图 1 0t 所示 。
图 1 KC 4型 地 下 铲 运 机 外 形 图 / Y- mm
Fi . Th u l e d a n ft e KCY- g1 e o t n r wi g o h i 4 LHD / u n n
第6 卷 第 1 3 期
有 色 金
属( 矿山部分)
21 年 1 01 月
D :0 3 6/ . s .6 1- 12 2 1 .1 0 4 OI1 .9 9 ji n 17 4 7 .0 1 0 . 1 s
K Y 大 型地 下 铲 运 机液 压 系统 设 计 与计 算 C4
1.72 m 3地下铲运机的改进
18 9 0年代初期 , 中冶金矿业集团公 司从美 国 鲁 引进 了 EM 0 2 I C 92型地下铲运机。在长期使用 和消
固定设备或装置是较适合 的, 但用 于井下颠簸不平
路面行驶的铲运机上联接变速箱后输出法兰与后桥 输人法兰 , 在装配时 , 很难保证变速箱后输 出法兰与 后桥输人法兰的同轴度 的误差达到齿式联轴器允许 的最大误 差。同时 , 铲运机在行驶 中, 振动很大 , 易 产生轴向跳动, 使该误差经常变化 , 齿式联轴器经常 损坏 , 而且更换十分费事。 ( )各传动轴均使 用载重汽车传动轴 , 3 其强度
及 耐久性 很难 适应 地 下铲运 机 的繁 重工 况 。
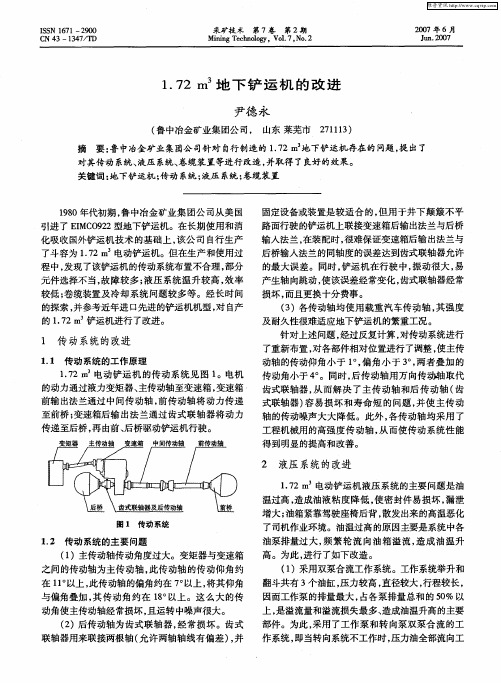
化吸收国外铲运机 技术 的基础上 , 该公司 自行生产 了斗容为 17 .2m 电动铲运机 。但在生产和使用过 程中 , 发现了该铲运机 的传动系统布置不合理 , 部分 元件选择不当, 故障较多 ; 液压系统温升较高 , 效率 较低 ; 卷缆装置及冷却系统问题较多等。经长 时间
17 地 下 铲 运 机 的 改 进 . 2 m3
尹德 永
( 鲁中冶金矿业集团公司 , 山东 莱芜市 2 1 1 ) 7 13 摘 要: 鲁中冶金矿业集团公 司针对 自 行制造的 17 .2m 地下铲运机存在的问题 , 出了 提
对其传动 系统、 液压 系统、 卷缆装置等进行改造 , 并取得 了良好的效果。 关键 词 : 下铲运 机 ; 动 系统 ; 地 传 液压 系统 ; 卷缆 装 置
2 液压系统 的改进
17 电动 铲运 机 液 压 系统 的 主要 问题 是 油 .2m
温过高 , 造成油液粘度 降低 , 使密封件易损坏 驾驶座椅后背 , 散发出来 的高温恶化 了司机作业环境。油温过高的原因主要是系统中各
基于双维度搜索的地下自主铲运机最优转弯轨迹规划

基于双维度搜索的地下自主铲运机最优转弯轨迹规划顾 青1,2),刘 立1),白国星1),孟 宇1)✉1) 北京科技大学机械工程学院,北京 100083 2) 北京科技大学顺德研究生院,佛山 528300✉通信作者,E-mail: ************.cn摘 要 提出了一种基于双维度搜索的实时轨迹规划方法,用来解决自主地下铲运机转弯轨迹规划问题. 该方法是一种结合采样思想和最优化算法的复合轨迹规划方法,包含三个主要步骤:基于双维度搜索策略的优化模型参数生成,基于二次规划的轨迹计算,以及基于约束检查的最优轨迹确定. 该方法新颖之处在于提出的基于转弯区域行驶时间和里程的双维度搜索策略,以及基于平稳目标的轨迹最优化模型,可根据弯道区域入口速度和位置,快速生成纵横向都有最优性保证的最优轨迹.该方法结构简单、易于实施,可通过关键参数的调整满足控制器对轨迹生成速度的实时性要求. 基于该轨迹规划方法的特点,使其不仅适用于实时轨迹规划,还可为未来智慧矿山的智能管控与优化调度提供底层约束. 多组算例验证了该方法的有效性和优越性.关键词 地下铲运机;自主行驶;轨迹规划;纵横向轨迹规划;搜索策略分类号 TP202.7Optimal turning trajectory planning of an LHD based on a bidimensional searchGU Qing 1,2),LIU Li 1),BAI Guo-xing 1),MENG Yu 1)✉1) School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China 2) Shunde Graduate School, University of Science and Technology Beijing, Foshan 528300, China✉Corresponding author, E-mail: ************.cnABSTRACT To solve the problem of smooth turning of an autonomous underground load-haul-dump loader (LHD), in this paper, amethod for turning trajectory planning of an LHD was proposed. This method is a type of hybrid trajectory planning method based on a bidimensional search. According to the characteristic of the problem, the longitudinal and lateral decomposition method was applied, and the basic algorithms are a sampling method and an optimization algorithm. The algorithm consists of three main steps that are parameter generation of the optimal model based on a bidimensional search strategy, trajectory calculation based on quadratic programming models, and determination of the optimal trajectory based on an articulated angle and collision avoidance constraints check. The novelty of this method lies in the proposed two-dimensional search strategy and trajectory optimization models. The two dimensions are the driving time and mileage of the trajectory in the turning area; the trajectory optimization model is based on the quadratic programming that can quickly generate the optimal trajectory in both dimensions according to the turning area entering speed and position of the LHD.This trajectory planning method is simple in structure and easy to implement. Moreover, it can satisfy the real-time requirement of the controller on the trajectory generation time by adjusting the key parameters. Based on the characteristics of the trajectory planning method, it is not only suitable for real-time trajectory planning but can also provide basic constraints for intelligent control and optimal scheduling of intelligent mines. A series of case studies was conducted to show the effectiveness and superiority of the proposed method.The case studies show that the optimal trajectories according to different entering speeds and positions can be obtained through the proposed method. A prototype experiment was performed to show the feasibility of the proposed trajectory planning method. This收稿日期: 2020−11−09基金项目: 国家重点研发计划资助项目(2018YFC0810500, 2019YFC0605300);广东省基础与应用基础研究基金资助项目(2019A1515111015)工程科学学报,第 43 卷,第 2 期:289−298,2021 年 2 月Chinese Journal of Engineering, Vol. 43, No. 2: 289−298, February 2021https:///10.13374/j.issn2095-9389.2020.11.09.002; method generates trajectories that are easy to track and control because the velocity, articulated angle, and angular velocity change gently.KEY WORDS load haul dump;autonomous driving;trajectory planning;vertical and horizontal trajectory planning;search strategy地下铲运机是一种铰接式结构的地下无轨移动采矿装备,具有转弯半径小,地形适应能力强的特点,广泛应用于矿产开采和运输. 随着采矿行业的发展,采矿深度不断增加,地下高温高湿环境对驾驶员身体有极大伤害,因此,自主行驶成为新一代智能移动采矿装备的必备功能.为了实现铲运机的自主行驶,轨迹规划与控制方法被广泛的研究[1−11]. 文献[1]~[8]研究了地下铲运机的导航控制方法,进而实现铲运机可以在地下巷道内采用“沿壁法”安全避障行驶. 文献[8]在无约束小范围内,可在铲装点和卸载点之间生成平滑行驶路径. 文献[9]提出了一种基于蚁群算法的路径规划方法,在地下巷道环境内,可生成全局最优路径. 文献[10]提出一种自主导航控制框架:首先人工示教生成导航地图和驾驶提示信息,然后在自主行驶时依照驾驶提示信息行驶. 基于这些研究,目前铲运机自主行驶技术可分为两类:一类是路径规划和跟踪,此类方法没有考虑到速度因素,因此对于行铲运机工作效率无法考虑,同时行驶速度较慢;另一类是先人工示教,然后自主行驶. 此类方法受到驾驶员经验影响较大,一般在直道中可以以较高的速度行驶,而接近转弯区域时,为了避免与巷道壁碰撞,驾驶员通常会提前减速,以很低的速度通过转弯区域,也就是说,通过转弯区域的行驶时间较长. 因为铲运机的地下金属开采工作主要是出矿,通常每个“铲—运—返”工作循环都要转弯,所以,转弯区域通过时间长会影响铲运机工作效率. 总的来说,目前铲运机的自主行驶水平还处于初级阶段.对于采用跟踪目标要来完成自主行驶功能的控制框架来说,除了研究高精度的跟踪控制算法[11−12],进行高质量的轨迹规划也是提高自主行驶水平的有效途径. 目前针对乘用车轨迹规划法方法的研究很多,总体可以分为直接法[13−19]、基于解耦的方法[20−32],较好的解决了乘用车在边界曲率平缓的公路上的轨迹规划问题. 文献[31]研究了铲运机在地下巷道内典型循环工况的轨迹规划问题,可视为一种转弯轨迹规划问题. 其中,纵向轨迹规划是一个二次规划问题,易于求解. 然而横向轨迹还是一个非线性优化模型,因此求解时间较长(而且有可能得不到最优解或可行解);此外,研究发现,当转弯角度过大时,现有的约束并不能约束铰接角及其角速度. 究其原因,还是没有将铰接角及其角速度作为决策变量加入到优化模型之中,无法对其直接约束. 然而,若是直接将铰接角及其角速度作为决策变量,则根据其运动状态方程,轨迹优化模型一定是一个复杂的非线性优化模型,能否得到最优解或可行解都没有保障.为了解决上述问题,提高自主铲运机的弯道行驶性能,根据铲运机及其行驶环境特点,本文提出了一种基于双维度搜索的地下铲运机最优转弯轨迹规划方法. 本文的贡献及新颖之处在于设计了一种基于行驶里程和时间的双维度搜索策略,在轨迹计算阶段,建立了一种以平稳行驶为目标的纵横向解耦二次规划模型,其中,铰接角及铰接角速度约束并不在优化模型中直接考虑,而是通过对生成轨迹进行约束条件检查来筛选得到满足约束的最优轨迹. 与现有规划方法不同的是,使用本文提出的方法可以快速得到在纵向横向两个维度都具有最优性保证的轨迹,不需要后备策略,保障了导航控制系统中轨迹规划层的可靠性,提高了生成轨迹的质量和速度,使铲运机在转弯时可以合理调整行驶速度和位置,实现高效转弯,提高生产效率.本文提出的方法具有以下特点:能够生成平稳的转弯轨迹,模型简单易于实时求解,所得到的轨迹具有最优性保证,不需要后备策略.文章结构如下,第一章介绍铲运机运动学模型、转弯区域模型及所研究的具体问题,第二章介绍轨迹规划方法框架,第三章介绍轨迹规划方法数学模型,第四章和第五章是算例分析与样机试验,验证本文提出的方法有效性和优越性,第五章总结结论.1 对象、场景模型与问题描述1.1 铲运机运动学模型P AP f(x f,y f)P r(x r,y r)θfθrP f P r P A L f L rγθfθr由于铲运机(Load haul dump,LHD)具有铰接结构,对其运动姿态的描述与刚性车辆不同,在运动规划时需要同时考虑其航向角和铰接角. LHD 的整体结构如图1所示,车体由两部分组成.是前后车体的交接点,是前桥中心点,是后桥中心点,和分别是前后车体的航向角. 和与之间的距离分别为和. 定义铰接角为与之差· 290 ·工程科学学报,第 43 卷,第 2 期P f P r 和之间的位置关系可以表示为铰接车辆的运动学模型[30]可以描述为v f ˙γγ其中,为前车体速度,为铰接角的角速度. 可知,前车体航向角的角速度为铰接角及其角速度的物理约束为γmin γmax ˙γmin ˙γmax 其中,为铰接角最小值,为铰接角最大值,为铰接角速度最小值,为铰接角速度最大值.1.2 弯道区域模型转弯区域如图2所示. 图2(a )中,巷道A 与O L safe αL A L B (x out ,y out )L ′A L ′BB 相交,铲运机从巷道B 向巷道A 转弯. 在路口建立直角坐标系,为转弯区域起点位置,位于巷道A ,弯道区域直角坐标系Y 轴垂直于巷道B 的边界;红色虚线为转弯区域结束的位置,垂直于巷道A 的边界. 是安全距离长度,黑色虚线之间的蓝色阴影部分是除去安全边界的可行区域;为两巷道夹角;和分别为巷道A 和B 在转弯区域的长度. 是弯道出口处左边界点位置坐标. 地下巷道转弯处都会根据铰接式采矿装备的转弯半径进行有磨角,目的是为了使这类移动采矿装备能够安全通过路口. 磨角后,转弯处可行区域增大,如图2(b )所示,和是磨角操作后巷道A 和巷道B 的剩余长度.1.3 问题描述当铲运机进入转弯区域时,根据铲运机当前速度、位置,实时生成一条平稳轨迹,使铲运机能够在安全转弯的情况下,平稳的行驶出转弯区域.在轨迹规划时,要满足下列约束条件:(1)前后车体都不与巷道壁发生碰撞;(2)铲运机速度不超过限速;(3)铰接角和铰接角速度不超过设计约束值;(4)在驶出转弯区域时,前车体方向与巷道壁平行.2 轨迹规划算法框架2.1 最优轨迹存在性分析在矿山建设中,巷道的结构和尺寸与矿产种类、分布、采矿工艺相关. 也就是说,在建设之初,巷道尺寸和拟选用的采矿装备是相互匹配的. 而且,在地下巷道的路口处,都要根据采矿装备的转弯半径进行磨角,这是一种标准操作,目的就是为了能使铰接式的移动采矿装备可以安全无碰撞通过路口. 因此,对于给定铲运机以及符合其标准的图 1 LHD 结构Fig.1 Structure of an LHD图 2 地下巷道转弯区域. (a )磨角之前的转弯区域;(b )磨角之后的转弯区域Fig.2 Roadway tuning area: (a) before grinding; (b) after grinding顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 291 ·路口,铲运机一定能够顺利通过.轨迹同时包含速度和位置信息,通常来说,可以通过路口的轨迹不止一条. 当铲运机采用不同的速度,沿不同曲率的路径曲线,都可以安全通过路口. 例如:对于一条比较平缓的位置曲线,采用不同的速度都可以很好的沿此位置曲线行驶,但是每种速度对应了不同的轨迹. 因此,当对轨迹设置一个的评价指标后,则在可行轨迹之中,存在一个最优指标值最小的最优解,本文的目标正是寻找这一最优轨迹.2.2 算法思想及框架本质上,弯道区域中每条可行轨迹可以通过不同行驶里程和行驶时间表征. 因此,为了能够根据入口速度和位置快速的生成最优轨迹,本文提出一种基于双维度搜索策略的轨迹优化方法. 此方法核心思想是在弯道行驶区域内,通过调整轨迹的里程和时间,找到最优轨迹. 本方法采用最优化算法进行构建,总体过程是:根据里程和时间迭代策略给出的终端位置和行驶时间,计算轨迹并检查是否符合铲运机铰接角物理约束,最终得到最优轨迹. 因此,算法主要包含三步:(1)确定行驶里程和行驶时间.此步骤的作用是确定当前轨迹规划问题的行驶里程与时间. 设计了一种双维度搜索策略,每次在轨迹计算前,首先通过搜索策略,从终端位置和行驶时间两个维度进行调整,确定当前迭代的终端位置和行驶时间.(2)轨迹生成.在转弯区域直角坐标系下,将轨迹分解为纵向和横向两个维度,分别采用二次规划生成最优轨迹(此时并不考虑铰接角约束). 本算法中,横纵向轨迹都建模为二次规划问题,因此,所得到的轨迹在纵向和横向两个维度都具有最优性保证,而且求解速度快.(3)轨迹铰接角约束检查及最优轨迹确定.对于生成的轨迹,根据运动学方程计算铰接通过,则最优轨迹找到;否则,回到第一个步骤进入下一次迭代.使用本算法,针对一个转弯路口,基于铲运机进入转弯区域的位置和速度,本文提出的方法能够快速的找到一条纵向和横向都具有最优性保证的最优轨迹,不需要后备策略. 第三章介绍规划算法的具体细节.3 轨迹规划算法3.1 基于双维度搜索的终端位置和行驶时间确定本算法中利用二次规划构建轨迹生成模型,设计基于双维度搜索的策略来确定优化问题的具体条件. 其中,外循环调整轨迹的行驶时间,内循环调整轨迹终端位置. 在每次循环中,首先计算纵向轨迹,然后计算横向轨迹.i j T i j 记为外循环中的循环变量,为内循环中的循环变量,每次循环中行驶时间通过方程(8)设置,v in ∆v 其中:是铲运机进入转弯区域的入口速度;为速度递减间隔.(x end i j ,y end i j )每次循环中轨迹终端位置,通过如下方程设置,W B ∆d =(W B −2L safe )/m m 其中:为巷道B 宽度;为位置递增间隔,即将巷道B 的可行宽度进行等间隔离散后的离散长度,为间隔离散个数.3.2 基于二次规划的转弯轨迹计算本算法中轨迹计算是基于纵向横向解耦和二次规划完成的. 首先生成纵向行驶轨迹,然后生成横向行驶轨迹.(1)纵向轨迹规划模型.N 将转弯轨迹离散为段,纵向轨迹规划建模为一· 292 ·工程科学学报,第 43 卷,第 2 期J lo ∆t =T i /N T i k λ1λ2ε1x i v x i a x i ∆a x i x 0=0v x 0=v x in a x 0=a x in v x in a x in 其中:是纵向轨迹目标函数;,是第i 次外循环时铲运机行驶时间;是轨迹点序号;和为权重系数,是松弛变量,是铲运机前桥中心点纵向位置;是前桥中心点纵向速度,和分别是前桥中心点纵向加速度和加速度变化量,,,;公式(11-5)表示的约束是为了令轨迹终端姿态与巷道壁平行. 和分别是铲运机进入转弯区域的入口纵向速度和在本算法中,在目标函数是最小化加速度及其变化量. 没有将目标速度考虑在优化模型之中,这是因为在弯道区域,理想的目标速度很难设定,设置不好会造成实际速度曲线发生突变,难以控制.(2)横向轨迹规划模型.横向轨迹规划也采用二次规划模型,与文献[30]中方法不同的是,此时并不考虑铰接角相关约束,因此可以将横向轨迹规划模型也建立为一个标准J la ρ1ρ2ε2y i v y i a y i ∆a y i y 0=y in v y 0=v y in a y 0=a y in v y in a y in 其中:是横向轨迹目标函数;和为权重系数,是松弛变量,是铲运机前桥中心点横向位置;是前桥中心点横向速度,和分别是前桥中心点纵向加速度和加速度变化量,,,;公式(12-5)表示的约束是为了令轨迹终端姿态与巷道壁平行. 和分别是铲运机进入转弯区域的入口横向速度和加速度. 与纵向轨迹规划模型设计思想相同的是,目标函数是最小化加速度及其变化量.3.3 基于约束检查的最优轨迹确定γi −max ˙γi −max 上面的模型并未考虑铰接角约束,为了保证铰接角及其角速度符合约束,本算法设计了约束检查环节. 根据公式(4)可以计算得到此轨迹对应的铰接角和铰接角速度序列. 记本条轨迹中最大铰接角为、最大铰接角速度为,对于可行的轨迹,有同时,对于最优轨迹来说,松弛变量应该为0,即此外,还需进行碰撞检查,本文采用的是最为简单的膨胀法,此处不赘述.j =j +1j =m i =i +1若公式(13)、(14)和(15)同成立,且铲运机与边界没有碰撞,则迭代停止,当前轨迹为最优轨迹;否则,返回公式(9)和(10)进行内循环;若时都没有获得最优解,则,返回公式(8)进行外循环. 由于外循环相当于降低行驶速度,所以在延长转弯行驶时间的情况下,一定能找到符合约束的轨迹,此时迭代停止,当前轨迹为最优轨迹. 具体流程如图3所示.图 3 双维度搜索轨迹规划方法流程图Fig.3 Flow chart for the two-dimensional search-based trajectory planning method顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 293 ·4 算例分析与讨论为了验证本文提出的轨迹规划方法,设计了三组算例. 设置了一种难度较高的转弯场景,转弯角度为直角,且铲运机从宽巷道向窄巷道转弯行驶,描述了一种铲运机从运输巷道向开采巷道内转弯的场景. 算例参数如表1所示. 三组算例分别设计为:以相同的入口位置,不同的入口速度进入ij T bestγmax˙γmax转弯区域. 将入口位置分为三个等级,由于铲运机在地下平直巷道工作时限速一般为15 km·h−1,也就是4 m·s−1左右,因此将入口速度分为四个等级,入口方向都与巷道B保持平行. 然后,针对每个入口速度,求解其最优轨迹,求解采用Matlab quadprog 函数,并将得到最优轨迹时内循环次数、外循环的次数、最优轨迹对应的行驶时间,以及此条轨迹中的最大铰接角和最大角速度列出.表 1 算例参数表Table 1 Parameters for case studiesW A/m W B/m L A/m L B/mα/rad L safe/m∆v/(m·s−1)∆d/(m·s−1)m5 4.53030π/2 1.50.10.54L f/m L r/mγmin/radγmax/rad˙γmin/(rad·s−1)˙γmin/(rad·s−1)L′A/m L′B/m N1.52−0.690.69−0.170.17242433(1)第一组算例,入口位置为(0,1.5), 不同入口速度的最优轨迹计算结果列表如表2所示.表 2 第一组算例结果Table 2 Results of the first groupv in/(m·s−1)i j T best/sγmax/rad˙γmax/(rad·s−1)12366.670.510.0627442.840.510.06313433.330.470.06417428.540.420.06(2)第二组算例,入口位置为(0,2.5), 不同入口速度的最优轨迹计算结果列表如表3所示.表 3 第二组算例结果Table 3 Results of the second groupv in/(m·s−1)i j T best/sγmax/rad˙γmax/(rad·s−1)12366.670.510.0627442.840.530.06313433.330.50.07417428.540.450.08(3)第二组算例,入口位置为(0,3.5), 不同入口速度的最优轨迹计算结果列表如表4所示.表 4 第三组算例结果Table 4 Results of the third groupv in/(m·s−1)i j T best/sγmax/rad˙γmax/(rad·s−1)12366.670.530.0627442.840.560.07313433.330.530.08417428.540.480.09从上面的算例可以看出,针对不同的入口速度和位置,采用所提出的规划方法都可以得到最优轨迹.∆v∆v=0.2在相同的位置,入口速度越高,迭代次数越多. 根据本算例中的问题规模,单次轨迹生成时间为0.005 s左右,若是迭代上百次,则有可能超过控制周期(例如,当入口速度为4 m·s−1时,迭代次数为17×3×2=102次,则得到轨迹的时间超过了0.5 s),这就会影响轨迹跟跟踪性能. 因此,可以通过调整速度减小间隔这一迭代关键参数的方法来减少迭代次数. 例如,当 m·s−1时,迭代次数减少一半. 因此,本方法可以根据控制器性能,调整间隔,满足实际控制需求.vγvθfvθr为了更直观显示轨迹,以入口坐标为(0, 2.5),入口速度为2 m·s−1的情况为例,图4~6给出了最优轨迹的位置曲线,速度曲线、铰接角、航向角和相应的角速度曲线. 图6中,、和分别是铰接角和前后车体的航向角速度. 可以看出,沿行驶方向速度、铰接角和铰接角速度变化平缓,适合跟踪控制.y in=2.5,v x in=2图 4 位置曲线()y in=2.5,v x in=2Fig.4 Position trajectory ()· 294 ·工程科学学报,第 43 卷,第 2 期T best通过本文提出的方法可知,可视为以当前初始状态及平稳目标下铲运机通过弯道的最短时间. 因此,当找到最优轨迹之后,若将行驶时间继续延长,也就是继续外循环,也能找到满足新的行驶时间的解. 同理,对于一个固定的终端位置,只采用外循环延长时间,也可得到满足要求的最优轨迹,下面分别举例.对于入口位置为(0, 2.5),入口速度为2 m·s−1的情况,得到最优轨迹时,i=7,j=4,T best=42.84 s,轨迹在出口的终端位置为(33, 35). 此时,若保持此终端位置,将行驶时间设置为70 s,通过本文提出的方法得到最优转弯轨迹如图7~9所示.还是以入口位置为(0, 2.5),入口速度为2 m·s−1的情况为例,当要求铲运机行驶出转弯区域时,位置位于巷道中心线,也就是出口位置为(32.25, 35),采用本文提出的方法,只进行外循环,得到的最优轨迹如图10~12所示. 此时i=9,弯道行驶时间为46.15 s.y in=2.5,v x in=2图 5 行驶方向速度曲线()y in=2.5,v x in=2 Fig.5 Heading velocity trajectory ()y in=2.5,v x in=2图 6 铰接角、前后车体航向角及角速度()γθfθr y in=2.5,v xin =2Fig.6 Angle and angular velocity for , and ()T i=70s图 7 位置曲线()T i=70sFig.7 Position trajectory ()T i=70s图 8 行驶方向速度曲线()T i=70sFig.8 Heading velocity trajectory ()T i=70s 图 9 铰接角、前后车体航向角及角速度()γθfθr T i=70s Fig.9 Angle and angular velocity for , , and ()顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 295 ·5 样机试验为了表明算法的可行性,进行了样机试验. 样EθfE v机如图13所示. 采用激光雷达和电子地图进行定位. 工控机为研华ARK-3500,Intel Core i5-3610ME,2.7 GHz. 试验环境为楼道内的一个直角转弯处,楼道宽度为2.2 m. 由于是楼道试验,为了保证安全,最高速度设置为1 m·s−1. 试验参数设置如表5所示. 样机从转弯区域外开始启动并加速到1 m·s−1,保持此速度进入转弯区域,车辆控制周期为0.2 s.要求行驶出转弯区域时车辆位于巷道中线,基于本文提出的轨迹规划方法,得到最优解时,i=1,因此轨迹生成时间在一个控制周期之内. 所生成的轨迹时间为7.2 s,速度和角度曲线如图14所示.路径采用LTV-MPC进行控制,速度采用PID控制,样机也平稳安全的通过了直角弯道,图15显示了速度和航向角误差,其中,为前车体航向角跟踪误差,为铲运机速度跟踪误差. 可以看出,误差都保持在一个很小的水平.图 13 铰接车试验平台Fig.13 Articulated vehicle6 结论(1)本文提出的方法可以生成纵向和横向都具有最优性保证的轨迹,理论上保证了生成轨迹的最优性.(2)本文提出的方法优化得到的轨迹,其纵向速度、铰接角及角速度变化平缓,易于跟踪控制.(3)本文提出的算法可根据底层控制器的控制周期灵活调整迭代关键参数,进而调整轨迹生成时间,满足控制器对目标轨迹生成时间的要求.(4)本文提出的算法适用于宽窄不同的、角度不同的转弯路口,不需要复杂的边界处理与坐标转换,因此便于实际部署实施.(5)本文提出的方法既可以根据入口速度和位置生成安全平稳的最优转弯参考轨迹;也可用于根据具体条件确定弯道最短行驶时间,因此,不仅适用于实时轨迹规划,也可为多装备协同运行,甚至未来矿山的智能管控和调度等问题提供系统约束.图 10 位置曲线(出口位置为(32.25, 35))Fig.10 Position trajectory (exit position is (32.25, 35))图 11 行驶方向速度曲线(出口位置为(32.25, 35))Fig.11 Heading velocity trajectory (exit position is (32.25, 35))图 12 铰接角、前后车体航向角及角速度(出口位置为(32.25, 35))γθfθrFig.12 Angle and angular velocity for , , and (exit position is(32.25, 35))· 296 ·工程科学学报,第 43 卷,第 2 期参 考 文 献Mäkelä H, Lehtinen H, Rintanen K, et al. Navigation system forLHD machines. IFAC Proc Vol , 1995, 28(11): 295[1]Roberts J M, Duff E S, Corke P I. Reactive navigation andopportunistic localization for autonomous underground mining vehicles. Inf Sci , 2002, 145(1-2): 127[2]Dragt B J, Camisani-Calzolari F R, Craig I K. An overview of theautomation of load-haul-dump vehicles in an underground mining environment. IFAC Proc Vol , 2005, 38(1): 37[3]Larsson J, Broxvall M, Saffiotti A. A navigation system forautomated loaders in underground mines // Proceedings of the 5th International Conference on Field and Service Robotics (FSR -2005). Port Douglas, 2005: 1[4]Shi F, Gu H S, Zhan K, et al. Study on the control method ofunderground loader autonomous driving and obstacle avoidance.Nonferrous Met (Mine Sect ), 2015, 67(5): 68[5](石峰, 顾洪枢, 战凯, 等. 地下铲运机自主行驶与避障控制方法研究. 有色金属(矿山部分), 2015, 67(5):68)Yang C, Chen S X, Liu L, et al. Reactive navigation for undergro-und autonomous scraper. J China Coal Soc , 2011, 36(11): 1943(杨超, 陈树新, 刘立, 等. 反应式导航在地下自主行驶铲运机中的应用. 煤炭学报, 2011, 36(11):1943)[6]Long Z Z, Zhan K, Gu H S, et al. The control method based onimproved fuzzy-PID algorithm for the autonomous driving of intelligent LHD. Nonferrous Met (Mine Sect ), 2015, 67(5): 76(龙智卓, 战凯, 顾洪枢, 等. 基于改进模糊PID 算法的智能铲运机自主行驶控制方法. 有色金属(矿山部分), 2015, 67(5):76)[7]Andersson U, Mrozek K, Hyyppä K, et al. Path design and controlalgorithms for articulated mobile robots // Field and Service Robotics . London, 1998: 390[8]Long Z Z, Zhan K, Gu H S, et al. Global path planning ofintelligent load-haul-dump based on improved ant colony algorithm. Nonferrous Met (Mine Sect ), 2013, 65(2): 6(龙智卓, 战凯, 顾洪枢, 等. 基于改进蚁群算法的智能铲运机全局路径规划. 有色金属(矿山部分), 2013, 65(2):6)[9]Shi F, Gu H S, Zhan K, et al. The basic method study on thelocation-navigation and control strategy for the independent LHD unit. Nonferrous Met (Mine Sect ), 2009, 61(2): 65(石峰, 顾洪枢, 战凯, 等. 自主铲运机的定位导航和控制策略基本思路. 有色金属(矿山部分), 2009, 61(2):65)[10]Jiang C, Wang H W, Li J K, et al. Trajectory-tracking hybridcontroller based on ADRC and adaptive control for unmanned helicopters. Chin J Eng , 2017, 39(11): 1743(姜辰, 王浩文, 李健珂, 等. 无人直升机自抗扰自适应轨迹跟踪混合控制. 工程科学学报, 2017, 39(11):1743)[11]Invernizzi D, Lovera M, Zaccarian L. Dynamic attitude planningfor trajectory tracking in thrust-vectoring UAVs. IEEE Trans Autom Control , 2020, 65(1): 453[12]Ziegler J, Bender P, Dang T, et al. Trajectory planning for Bert-ha — A local, continuous method // 2014 IEEE Intelligent Vehicles Symposium Proceedings . Dearborn, 2014: 450[13]Ziegler J, Bender P, Schreiber M, et al. Making bertha drive—anautonomous journey on a historic route. IEEE Intell Transp Syst Mag , 2014, 6(2): 8[14]Liu C L, Lin C Y, Tomizuka M. The convex feasible set algorithmfor real time optimization in motion planning. SIAM J Control Optim , 2018, 56(4): 2712[15]Liu C L, Lin C Y, Wang Y Z, et al. Convex feasible set algorithmfor constrained trajectory smoothing // 2017 American Control[16]表 5 试验参数表Table 5 Parameters for experimentsW A /m W B /m L A /m L B /m α/rad L safe /m ∆v /(m·s −1)∆d /(m·s −1)m 2.22.23.63.6π/20.30.10.83L f /m L r /m γmin /rad γmax /rad ˙γmin /(rad·s −1)˙γmin /(rad·s −1)L ′A/m L ′B/m N 0.60.6−0.690.69−0.170.173.6 3.633图 14 参考速度和航向角曲线Fig.14 Reference trajectory for velocity and heading图 15 速度和航向角跟踪误差Fig.15 Tracking Errors trajectory for velocity and heading顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 297 ·。
地下铲运机工作装置有限元参数化建模

关键词 :A SS 参数化 ;工作 装置 ; 限元分析 NY ; 有
A sr c : W i S a a tr e e in ln u g . a p rmeei d p o rm a e n d v lp d t ra ef i l . b tat t AN YS p rmeei d d sg a g a e h z a a tr e rg a h s b e e e e o c e t n t ee z o i e
12 程 序设计 .
O =C —ghb L t— 4 2
l = M
dn 踟 。 l ld = s}Z a cf +fh g 2/
= ar cc。s
根据上述数学模型 ,可 以编写地下铲运机运动 状态计算程序。对于某一型号的地下铲运机只要输 入举升液 压缸 的长 度 f及 翻斗液 压缸 的长度 f j f ,
i no o i nios he or nt o ee i o t a e okdot dt o i e c ne l nm dla nr dm w r n c d i ,t o i e fvr p i b re ew r n dv ef i e t oe C a kg o tn c da y njn c n w ua h n kg i i te me n
维普资讯
地下铲运机正傩 置
北京科技 大学安期生技 术有限公司 迟可伟
摘
参数他建模
孙 健 冯茂林
要 :应 用有 限元 分析 软件 A S S的参数化设计 语言 ( P L ,针对 c NY AD ) Y一2型地 下铲运 机工作装 置 编写
了建立有限元模型的程序,给定任意工况举升液压缸和翻斗液压缸的长度,即可计算该工况下工作装置各铰点
中钢衡重地下遥控铲运机新产品面世

供 了实 际参 考 。
参考文献 :
2 0 0 0 4 O O O 6 0 0 O
0 0
l 0 0 0
2 0 0 0
3 0 0 0
4 0 0 0
O 0
[ 1 ] 吕有界 . 防汛 抢险 螺旋桩 设
计 与焊接过程 分析 [ J ]. 机
匕蕾 盐誊釜 譬譬 釜l 上———— ——J _ _ 兰芷 盖 翌 盔
o f n o n — s mo o t h c h a r a c t e r i s t i c s o n b i o n i c s b u l l d o z e r b l a d e s
i n r e s i s t a n c e r e d u c t i o n a g a i n s t s o i l I J j. J o u na r l o f t e r r a — me c h a n i c s ,2 0 0 3( 3 9 ) :2 2 1 — 2 3 0 .
Mo t s c h u l s k y )减粘脱 附的仿生 学研 究 [ J ]. 生物物理
学报 ,2 0 0 1 ,1 7( 4 ) :7 8 5 — 7 9 3 .
1 5 j L u q u a n R e n ,Z h i w u H a n ,J i a n q i a o L i ,e t a 1 . E f f e c t s
起 型仿生 曲面在一定压力作明波纹型仿
第一作者简介 :吕有界 ,男 ,1 9 7 2 年生 ,湖南邵阳人 ,博
士 ,副教授。研究 领域 :机械设计 。
( 编辑 : 向 飞)
/ f _ _ 誊 _ 岛 ■ 曩 0 窀 | ● 雾 曩 / _ r — — 3 — 7 — — — 下 / F 覃 丐 i _ ■ 罐0 ]
HCY-1小型地下铲运机静液压行走系统设计

的铲 取 和短途 运 输 。静 液 压 系 统 具 有传 动平 稳 、 布 置灵 活 、 无级 调速 等优 点 , 在小 型设备 中应 用广 泛 。
减速籀 行走马达 变量泵 联辘器 电动机
图 1 小 型 地 下 铲 运 机 行 走 系统 方 案
2 液压 系 统 组 成 及 设 计 思路
量小 , 因此其 油箱 、 冷却 器 等 尺 寸 也 都 大 为减 小 , 系 统 占用 空间小 。正是这 些特 点使 静液 压 系统在 工程
机械 行走 系统 中得 到 了广泛 的应 用 。 HC Y一 1 静 液 压 行 走 系统 原 理 如 图 2所 示 , 由
一
的流 量给 马达 , 维 持 系统 回路 运 转 , 满 足 最 大车 速 ,
原 动机 三者 之 间的 匹配和 系统 的热 平衡 , 并 对 系统 各 项参 数进 行 了详 细 的计 算 。在 现 场
试验中, 静液 压行 走 系统 的各项 指标 均能 达到 机械行 业 标 准 J B / T 5 5 0 0 -2 0 0 4 < < 地 下铲运
机》 的要 求 , 设 备 现 已正 式 投 入 生 产 。
n d / ( r / ai r n )
电动 机 额 定 功 率
P d / ( k W)
电动 机 输 出 扭 矩
T a / ( N・ m)
进 出 口压 差 △P 通 常在 4 0 0 b a r 左右 , 常 用 马 达 的
工 作压差 要求 在其额 定值 的 8 0 ~9 0 %, 或 更 低一 些, 因此 , 将行 走系统 的工作 压力 暂定 3 2 0 b a r 。
5 5 0 0 -2 0 0 4 { { 地 下铲 运机 》 确定设 备 的相关 参数 。与
WJD-0.75地下铲运机说明书

从集成阀低压溢流阀溢出的过量冷却油进入马达壳内,然后通过管路进入油泵壳内, 依次流经每一个液压元件,然后从泵壳流出,经冷却器回油箱形成循环的冷却回路。 2.2.1.4 双向排量控制阀的功能
7
D
卷
揽
方
向
C
B
A
图 7 卷缆液压系统原理图 2.5 制动液压系统工作原理
铲运机的制动系统有工作制动、紧急制动和停车制动三个独立制动系统,如若某一制 动系统失灵,不影响另两个制动系统工作。这样铲运机的制动是可靠、有效的。 2.5.1 工作制动系统(见图 8)。
高压油 低压油
输
输
入
出
图 8 工作制动系统图
A
B
图 5 工作装置及液压系统图
6
2.3.2 转向机构 铲运机的转向采用中央铰接式液压转向装置,转向液压系统由油泵、全液压转向器和
一个转向油缸组成,其液压原理如图 6 所示。
图 6 转向液压系统原理 全液压转向器是本系统的核心部件,它有一个随动转阀和一对摆线针齿轮啮合副组成 的计量马达和两个缓冲阀等组成,结构简单紧凑,当机器某一侧遇到大的阻力时,缓冲阀 动作,以起到保护作用。司机转动方向盘,即可使转向油缸活塞杆伸缩,实现转向。应该 指出,本液压系统没有设置与换向踏板联动的换向阀,因此在转同一个方向的弯时,若前 进而顺时针转动方向盘,则后退时逆时针转动方向盘。 2.4 卷缆装置及液压系统 为了实现对拖曳电缆的自动卷放,使铲运机进退自如,在本机尾部一侧安装了一个电 缆卷筒(筒内装有集电环,用以连接外部电源),卷缆液压系统主要有油泵、油马达、液 压换向阀、溢流阀组成,其原理如图 7 所示。
地下铲运机的发展及结构原理介绍
地下铲运机第一章:国内外地下铲运机的现状和发展趋势“地下铲运机”一词系参考英文“LHD unit"(Load-haul-dump unit),即装—运—卸设备演绎而来。
地下铲运机是以柴油机或以拖曳电缆供电的电动机为原动机、液压或液力-机械传动、铰接式车架、轮胎行走、前端前卸式铲斗的装载、运输和卸载设备。
主要用于地下矿山和隧道工程。
地下铲运机机身低矮、驾驶室横向布置、采用光面或半光面地下矿用耐切割工程轮胎且装有柴油机尾气净化装置。
按动力源来分,可分为以柴油机为动力的内燃铲运机和以电动机为动力的电动铲运机。
按斗容来分,大致可分为:小型铲运机:斗容1.5m3及以下的铲运机;中型铲运机:斗容2~4m3的铲运机;大型铲运机:斗容4m3以上的铲运机。
此外,原中国有色金属工业总公司所属的衡阳有色冶金机械总厂和金川有色金属公司第二机械厂生产的地下铲运机型号采用了“CY”系列或“JCY”系列命名方法。
为简便起见,以下所使用的“铲运机”一词,均指“地下铲运机”。
一、20世纪60 --70年代:地下铲运机发展和推广的年代进入20世纪70年代,国外地下铲运机技术已渐趋成熟,形成了系列化产品。
当时的铲运机几乎都是柴油机驱动的内燃铲运机,为此,需采用低污染柴油机并在机上设置柴油机尾气净化装置,采用贵金属催化净化器(和/或)水洗涤箱,还需增设通风设施,加大地下通风量来稀释柴油机尾气,并将其排出坑外,以便为矿山提供合乎卫生标准的作业条件,从而使矿山通风费用几乎成倍增加。
如果用电动铲运机取代所用的全部内燃铲运机,则所需通风量可减少一半以上。
广泛的试验和实践表明,电动铲运机具有低污染;低热量(热量不到同级内燃铲运机的30%),低噪声;维修量很小;功率损失小等优点。
缺点是:拖曳电缆限制了机器的机动性能和活动范围,也限制了运行速度,在运距较长,或矿点分散,或者在各采场或各分层频繁进行调动的地方使用,其技术性能和经济效果还不如内燃铲运机。
地下铲运机
二、地下铲运机的主要参数1、额定载重量:铲运机具有标准操作重量,在硬的、光滑的水平面上,以不超过6.4km/h的速度运行时,为保证所需稳性,而规定的铲斗载荷。
2、铲斗容量:一般指几何斗容(额定斗容)。
3、机重:地下铲运机分为结构重量和操作重量一般铲运机重量指的是其操作重量,机重指的是附着重量(随机携带的附件重量)4、发动机功率:是在标准大气压,环境文化度20°和相对湿度60%的条件下,发动机带有为保持自身运转所必须的附件,在额定转速时所测得的功率。
5、最牵引力:是指铲运机在标准操作重量,在平坦水泥路面上进行牵引试验所测得拖曳牵引力的最大值。
6、插入力:是指铲运机铲掘物料时,在铲斗斗刃上所产生的插入料堆的作用力。
7、铲取力:是指具有标准操作重量的铲运机停在平坦硬路面,动臂位于最低位置,铲斗斗刃的底部平放在地面上,它在地面上下的偏差不超过25㎜的情况下利用转斗油缸或举升油缸使铲运机后部离开地面时,作用在斗刃后面100 ㎜处的最大垂直向上的力。
8、铲斗卸载高度和卸载距离:卸载高度:是指铲斗前倾卸载,铲斗斗底与水平面成45°时,铲斗刃口(斗尖)距地面的垂直距离。
卸载距离:是指相应写在高度时,铲斗刃口(斗尖)到铲运机最前面一点(前轮胎)之间的水平距离。
9、铲斗后倾角(后斗角)和卸载角:铲斗后倾角:动臂在最低位置,铲斗最大后倾角时,斗底与水平面的夹角称为铲斗后倾角。
(一般为50°―60°)卸载角:铲运机在卸载时,铲斗斗底与水平面的夹角。
10、地下铲运机工作机构动作时间:动臂举升、下降及铲斗卸载时间的长短。
动臂举升时间:4-8s;动臂下降时间:3-5s;铲斗卸载时间:3-6s内燃铲运机的总体结构:它主要有前车体和后车体两大部分组成。
前车体(前工作体):包括工作装置、前驱动桥。
后车体:主要是布置动力传动系统。
2 地下铲运机的工作过程(1)插入状况:动臂放下,铲斗放置于地面,斗底触地,斗底板与地面呈3°―5°倾角,开动地下铲运机,铲斗借助机器的牵引力插入料堆。
基于CAN总线的地下自主铲运机控制系统设计

的可靠 性 和 灵 活 性 。根 据 实 际 需 要 , 出 了基 于 提
C N 总 线 的地 下 自主 铲 运 机 控 制 系统 。 A
1 基 于 现 场 C N 总 线 的 分 布 式 控 制 A
第6 3卷
第 2期
有 色 金 属
No f r u e as n eT sM t t 0
Vo 6 .NO. l 3 2
2 1 年 5 0 1
M n 1 0 : 0 3 6 / . s . 0 1—0 1 . 0 1 0 . 6 s 2 2 1 .2 03 1
检 测 出任 何 错 误 。C N总 线 的 数据 通 讯 具 有 突 出 A 的可靠性 、 实时性 和灵 活性 , 目前 已经广泛应 用在各
个 自动 化 控 制 系 统 中 。
现无人 操纵 的 自主采掘铲 运 。 自主铲 运机通 过计算
机 控 制 , 通 过 叶 控 室 直 接 监 视 控 制 一 台 或 多 台 地 人 1 下铲运 机作业 。 地 下 自 主 铲 运 机 车 载 控 制 系 统 需 要 完 成 的 控 制
关键词 : 采矿工程 ; 铲运机 ; A C N总线 ; 模块
中 图 分 类 号 :D 2 ; D 3 文 献 标 识 码 : 文 章 编 号 :0 1— 2 1 2 1 ) 2— 2 0— 4 T 4 1 T 64 A 10 0 1 ( 0 1 0 0 6 0
引 言
自动化 技 术 在采 矿 设备 上 的应 用 , 以提 高采 可 矿 的生产 效率 , 低 采矿 成 本 , 善采 矿 作业 环 境 , 降 改
基 于 C N总 线的 地 下 自主铲 运机 控 制 系统设 计 A
烟台兴业XYWJ-1型地下内燃铲运机备件手册
48
303B06
键
1
49
303B07
孔用弹性挡圈
2
50
303B08
轴承
2
51
201B01
油杯
1
52
3030003
前泵进油法兰
1
工作液压系统(30300)
序号
代号
名称
数量
备注
53
203B18
内六角螺钉
8
54
3030004
后泵进油法兰
1
55
303B09
胶管总成
1
前泵吸油
56
303B10
胶管总成
1
后泵吸油
转向油缸
1
8
205B04
胶管总成
1
转向器-转向缸有杆腔
9
205B05
胶管总成
1
转向器-转向缸无杆腔
10
205B07
胶管总成
1
连接板-转向器
11
205B06
胶管总成
1
转向器回油
12
20502
隔壁接头
1
13
205B08
胶管总成
1
转向泵-中间板
14
305B01
胶管总成
1
转向泵吸油管
15
3050001
转向泵出油法兰
1
50
208B23
胶管总成
1
齿轮箱加油管
51
208B20
螺母
1
52
20828
接头
1
53
2080002
透气塞总成
1
54
203B08
JB 8518—1997 地下铲运机 安全要求

地下铲运机安全要求JB 8518—1997中华人民共和国机械工业部1997-03—04批准1997—10—01实施前言本标准为机械行业强制性标准。
本标准自1997年10月1日起实施。
本标准由全国矿山机械标准化技术委员会提出并归口。
本标准负责起草单位:南昌矿山机械研究所。
本标准主要起草人:罗仁如、彭嵩、杨现利、谢志刚、吴智芳。
0 引言本标准符合有关法规规定。
本标准所包括的危险范围,表明在本标准的范围中。
1 范围本标准规定了对地下铲运机的安全要求。
本标准是从物理性能和预定使用方面对地下铲运机的限制。
本标准所包含的安全要求是针对地下铲运机所有的危险,它适用于如在GB/T 15706.1—1995中3.11所描述的机器寿命期内各阶段所产生的危险。
本标准适用于矿山(煤矿除外)、工程、隧道中使用的地下内燃铲运机和地下电动铲运机。
2 引用标准下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。
本标准出版时,所示版本均为有效。
所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。
GB 998—82 低压电器基本试验方法GB 2894—88 安全标志GB 3768—83 噪声源声功率级的测定简易法GB 4064—83 电气设备安全设计导则GB 8189—87 柴油机排放试验方法第二部分:地下矿、机车、船舶及其他工农业机械用GB 12972.1—91 矿用橡套软电缆第一部分:一般规定GB 15706.1—1995 机械安全基本概念与设计通则第1部分:基本术语、方法学JB/T 5501—91 地下内燃铲运机试验方法冶金地下矿山安全规程(1990年版)3 危险一览表地下铲运机(以下简称铲运机)在其寿命期间内,因物理性能及预定使用而在各阶段可能产生的危险,见表1。
4 安全要求和措施4.1 铲运机起吊处应有明显的指示标牌。
4.2 在动臂及前、后车架铰接处,应设置预防人身事故的醒目的安全标志,并符合GB 2894的规定。
井下铲运机

井下铲运机引言井下铲运机是一种在地下采矿和隧道施工中广泛使用的专用机械设备。
它以其强大的挖掘和搬运能力,提高了井下工作效率,并减少了劳动力成本。
本文将介绍井下铲运机的工作原理、主要组成部分、应用领域以及未来发展趋势。
一、井下铲运机的工作原理井下铲运机的工作原理基于液压系统和电动机的协同工作。
它的主要组成包括机舱、铲斗、液压系统、电动机和控制系统。
当操作员通过控制台控制铲斗的动作时,电动机将动力传递给液压系统,液压系统通过液压活塞将动力转化为机械能,驱动铲斗进行挖掘和搬运工作。
二、井下铲运机的主要组成部分1. 机舱:机舱是井下铲运机的主要操作控制中心,操作员通过控制台控制铲斗的升降和倾斜等动作。
机舱还配备了安全装置,以确保操作员的安全。
2. 铲斗:铲斗是井下铲运机的核心部件,用于挖掘和搬运矿石、土石方等物料。
根据不同的工作需求,铲斗的形状和容量可以进行调整。
3. 液压系统:液压系统是井下铲运机的动力传输和控制系统。
它包括液压泵、液压缸、液压阀等部件。
液压系统的优势在于能够提供强大而平稳的动力,同时具有较高的效率和可靠性。
4. 电动机:电动机是井下铲运机的动力来源,它将电能转化为机械能,驱动液压系统和铲斗的运动。
电动机通常采用交流电动机或直流电动机,具有高功率和高效率的特点。
5. 控制系统:控制系统是井下铲运机的智能化部分,它通过传感器和控制器,实现对铲斗和液压系统的精确控制。
控制系统还可以监测和记录井下铲运机的工作状态,提供故障诊断和维护提示。
三、井下铲运机的应用领域井下铲运机主要应用于以下领域:1. 煤矿采矿:井下铲运机可以替代人工进行煤矿采矿作业,提高采矿效率,降低劳动强度和事故风险。
2. 金属矿山开采:井下铲运机可以用于金属矿山的开采和运输工作,提高矿石的开采率和生产效益。
3. 隧道施工:井下铲运机可以在隧道施工过程中用于挖掘和搬运土石方,加快施工进度。
4. 地下垃圾处理:井下铲运机可以用于地下垃圾处理厂的垃圾清理和搬运工作,提高垃圾处理效率。
一种蓄电池铲运机的动力系统设计
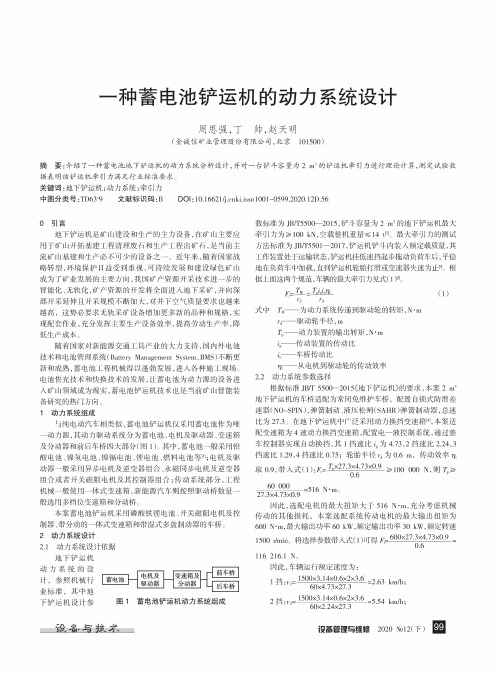
—种蓄电池铲运机的动力系统设计周思强,丁帅,赵天明(金诚信矿业管理股份有限公司,北京101500)摘要:介绍了一种蓄电池地下铲运机的动力系统分析设计,并对一台铲斗容量为2m3的铲运机牵引力进行理论计算,测定试验数据表明该铲运机牵引力满足行业标准要求。
关键词'地下铲运机;动力系统;牵引力中图分类号:TD63+9文献标识码:B DOI:10.16621/ki.issnl001-0599.2020.12D.560引言地下铲运机是矿山建设和生产的主力设备,在矿山主要应用于矿山开拓基建工程清理废石和生产工程出矿石,是当前主流矿山基建和生产必不可少的设备之一。
近年来,随着国家战略转型,环境保护日益受到重视,可持续发展和建设绿色矿山成为了矿业发展的主要方向,我国矿产资源开采技术进一步的智能化、无轨化,矿产资源的开发将全面进入地下采矿,并向深部开采延伸且开采规模不断加大,对井下空气质量要求也越来越高,这势必要求无轨采矿设备增加更多新的品种和规格,实现配套作业,充分发挥主要生产设备效率,提高劳动生产率,降低生产成本。
随着国家对新能源交通工具产业的大力支持,国内外电池技术和电池管理系统(Battery Management System,BMS)不断更新和成熟,蓄电池工程机械得以蓬勃发展,进入各种施工现场。
电池快充技术和快换技术的发展,让蓄电池为动力源的设备进入矿山领域成为现实,蓄电池铲运机技术也是当前矿山智能装备研究的热门方向。
1动力系统组成与纯电动汽车相类似,蓄电池铲运机仅采用蓄电池作为唯一动力源,其动力驱动系统分为蓄电池、电机及驱动器、变速箱及分动器和前后车桥四大部分(图1)。
其中,蓄电池一般采用铅酸电池、镰氢电池、镰镉电池、锂电池、燃料电池等叫电机及驱动器一般采用异步电机及逆变器组合、永磁同步电机及逆变器组合或者开关磁阻电机及其控制器组合;传动系统部分,工程机械一般使用一体式变速箱,新能源汽车则按照驱动桥数量一般选用多档位变速箱和分动桥。
211086426_地下铲运机智能化技术进展探索

地下铲运机智能化技术进展探索图1 SLAM效果图(2)自主学习能力。
地下铲运机从远程遥控阶段向智能化阶段发展,需要具备自主学习能力,如自动规划路径、自主躲避障碍物、实时调整铲运机的工作状态、自主装卸矿石等。
面对井下复杂特殊的环境,铲运机要自行完成行走、铲装、避障等动作,目前仍具有极大的挑战,随着深度学习与人工智能的兴起,一些学者开始将此类技术应用到铲运机的智能化发展中,让车辆自主执行复杂的任务和操作。
(3)地下车辆的协同控制。
大型矿山井下矿石运输工作是由多台铲运机协同完成的,不同铲运机之间电气自动化程度差异较大,会导致各台铲运机协同作业过程中会出现紊乱,造成地下车辆系统运行的混乱,所以需要进行标准化制定,解决此类差异性问题。
地下铲运机智能化技术方案目前,公司实现了从研发传统地下燃油铲运机、地下电动铲运机到研发地下遥控电动铲运机以及地下遥控燃油铲运机的转变,基于公司目前正在生产的图2 铲运机智能化技术方案通讯架构通讯系统是该智能化技术方案中关键的一环,其性能的优劣直接决定了整个系统的工作性能,对通讯网络的性能要求见表1。
表1 通讯网络性能要求最大网络延迟/ms 最大延时抖动/ms 网络带宽/Mbps 50(包含无线网络最大延迟200)±3015(单台铲运机,包含2~4视频信号和操作安全信号)在地表控制中心和矿井巷道之间建立以太环网,井下巷道内设置若干WIFI 无线基站,无线AP 采用高通方案并支持IEEE802.11ac 标准的高性能、高带宽、多功能电信级无线设备,其WIFI 信号具有较好的抗干扰和反射、折射能力,合理地布置无线AP 的位置和方向,可以实现铲运机工作巷道的无线信号全覆盖。
车辆状态信息、环境感知信息、视频监控信息等多元信息通过通讯网络传输到控制中心,因此,其无线AP 性能要求较高,统,操作人员通过液晶显示屏查看地下铲运机的各类状态信息以及铲运机所处的工作环境信息,根据现场反馈的信息及时做出相应的操作控制,并通过终端操作台发出控制指令。
地下铲运机自主铲装技术现状及发展趋势
第29卷第1期2021年2月Vol.29No.1Feb.,2021Gold Science andTechnology35地下铲运机自主铲装技术现状及发展趋势姜丹,王李管*中南大学资源与安全工程学院,湖南长沙410083摘要:为提高地下铲运机铲装效率及作业精度,实现铲运机全自动作业,梳理了国内外地下铲运机自主铲装技术的相关理论技术和研究方法,并从环境感知与建模、铲斗轨迹控制和自动称重3个方面对铲装过程的研究成果进行了归纳总结。
研究结果表明:当前环境感知与建模技术难以同时满足速度和精度的要求,存在铲斗轨迹控制难度大以及自动称重技术研究不全面等问题。
研究多传感器信息融合技术,人工智能技术,以及适用于地下的通信网络是实现铲运机自主铲装的前提,也是未来开展该领域研究的重要方向。
关键词:地下铲运机;自主铲装;感知建模;轨迹控制;称重系统;人工智能中图分类号:TD52文献标志码:A文章编号:1005-2518(2021)01-0035-08DOI:10.11872/j.issn.1005-2518.2021.01.162引用格式:JIANG Dan,WANG Liguan.Present Situation and Development Trend of Self-loading Technology for Underground Load-Haul-Dump[J].Gold Science and Technology,2021,29(1):35-42.姜丹,王李管.地下铲运机自主铲装技术现状及发展趋势[J].黄金科学技术,2021,29(1):35-42.铲运机(Load-Haul-Dump Machine,LHD)是地下金属矿山装载和运输矿石的主要设备,在提高矿山生产率、降低生产成本等方面发挥着重要作用(陈盟等,2013)。
然而,铲运机的工作环境存在以下问题:①生产环境恶劣,粉尘、噪音和振动等问题突出;②面临高应力、高温和高井深等挑战(古德生,2004);③车身低矮,驾驶视野受限(Eger et al.,2004);④车辆控制难度大,对驾驶员技能要求高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
地下铲运机设计
作者:郑东梅
来源:《数字化用户》2013年第25期
【摘要】地下铲运机是工程机械的主要机种之一,广泛用于建筑、矿山、水电、铁路等国民经济各部门。
地下铲运机的工作装置由铲斗,动臂、摇臂、连杆及液压系统等组成。
铲斗以铲装物料;动臂和动臂油缸的作用是提升铲斗并使之与车架连接;转斗油缸通过摇臂,连杆使铲斗转动。
动臂的升降和铲斗的转动采用液压操作。
【关键词】工程机械地下铲运机工作装置
一、绪论
“地下铲运机”一词系参考英文“LHD unit”(Load-haul-dump unit),即装-运-卸设备演绎而来。
地下铲运机是以柴油机或者以拖曳电缆供电的电动机为原动机、液压或液力—机械传动、铰接式车架、轮胎行走、前段前卸式铲斗的装载、运输、卸载的设备。
主要用于地下矿山和隧道工程。
现代地下铲运机的发展方向呈现多用化,以适应不同的作业环境以及尽可能发挥“一机多用”性,只需要更换相应的作业附件就可以实现不同的作业,减少了矿山开采作业的成本。
地下铲运机视距内遥控操作和视频遥控操作技术已经广泛应用于危险区域的作业工作。
新一代的地下铲运机已经能实现自动或者半自动操作,整个过程全部实现自动化或部分实现自动化。
二、铲斗的设计
铲斗的断面形状由铲斗圆弧半径r、底壁长l、后壁高h和张开角γ等四个参数确定。
铲斗的圆弧半径r越大,物料进入铲斗的流动性越好,有利于减小物料进入铲斗的阻力,卸载物料时快而干净。
但r过大时,铲斗的开口变大,使铲斗很难装满,且铲斗的外形较高,影响了驾驶员对铲斗的斗刃的观察情况。
后壁高h是指铲斗上缘至圆弧与后壁切点见的距离。
底壁长l是指铲斗底壁的直线段长度。
l越长,则铲斗铲入物料堆的深度越大,铲斗越易装满,但是铲掘力将随着力臂的增大刃减小;同时,卸载高度也会减小。
对装载轻质物料为主的铲斗,l可以选择大一些,对于铲装矿石为主的铲斗,l取小一些。
铲斗张开角rr为铲斗后壁与底壁间的夹角,一般选取45°~52°45°~52°。
适当减小张开角并使铲斗与地面有一定的斜度,可减小插入阻力,提高铲斗的装满程度。
铲斗的宽度应大于铲运机两前轮外侧间的宽度,每侧要宽出50~100mm50~100mm。
如果铲斗的宽度小于两轮外侧间的宽度,则铲斗铲取物料后形成的料堆阶梯会损伤轮胎的外侧壁,并增加行驶阻力,同时驾驶员也可以通过铲斗判断车辆的通过性。
装有斗齿的铲斗在作业时,插入力由斗齿分担,形成较大的比压,铲斗容易插入密集的料堆或者易于撬起大块物料,
并且容易更换和修补。
因此,对主要用于地下铲装矿石和密度较大的地下铲运机来说,其铲斗装有斗齿,能够更好地保护斗刃,延长斗刃的使用时间。
三、连杆机构的设计
工作装置的结构设计是一个比较复杂的问题,因为组成工作装置的各构件的尺寸及位置的相互影响,可变性很大。
对于选定的结构形式,在满足上述要求下,可以有各种各样的构件尺寸及铰接点位置。
因此,只有在综合考虑各种因素的前提下,对工作装置进行运动学和动力学分析,通过多方案比较,才能最后选出最佳构件尺寸及铰接点位置,使所设计的工作装置不仅满足使用要求,还要具有较高的经济性能指标和尽可能提高工作装置的工作效率。
(一)转斗油缸后置式正转六杆机构
此种机构与上述油缸前置式相比,前悬较大、传动比大,活塞行程变短。
缺点是转斗油缸与车架的铰接点位置较高,影响了司机的视野;转斗铲取作业时油缸的小腔进油使得铲取力较小。
(二)转斗油缸后置式反转六杆机构
转斗油缸的大腔进油时铲斗转取,并且连杆系统的倍力系数能设为较大值,能获得较大的铲取力;合理选择各机构的尺寸,能得到较好的铲斗平动性能,还可以实现铲斗的自动放平;结构紧凑,前悬小,司机的视野好。
(三)正转五杆机构
当铲斗翻转铲取物料时,短连杆与活塞杆在油缸拉力和铲斗重力作用下形成一条直线,如同一杆;当铲斗卸载物料时,短连杆相对活塞杆转动,避免了活塞杆与铲斗底部相碰的缺点。
综上分析可知,反转六杆机构有较多的优点,能够较理想的实现地下铲运机的铲装要求,所以广泛应用在地下铲运机的工作装置上。
采用图解法确定铲装工况工作时的9个铰接点的位置等关键参数,进行工作装置确定计算、选取受力最大的典型工况确定外载荷、进行受力分析并完成工作装置各主要构件(动臂、摇臂、连杆、铰销)强度校核。
对不同类型油缸作用力进行分析,明确油缸选择参数,确定转斗油缸与动臂油缸被动作用力。
完成工作装置的限位机构和自动放平机构工作原理分析。
四、总结
通过研究市售的地下铲运机的工作装置和结构相似的露天装载机的工作装置,本毕业设计旨在设计出一种高效、结构简单、制造加工方便的地下铲运机工作装置。
本设计很好地完成了地下铲运机工作装置的设计,并对相关部件进行了强度校核,满足设计要求。
因在机械设计及制造方面经验的缺乏,在工作装置设计上有所不足,有待进一步改进。
具体改进设想如下:通
过 Autodesk Inventor 软件创建地下铲运机工作装置三维立体模型,对运动情况进行仿真模拟。
通过应力分析功能,对工作装置各个部件进行应力分析以保证各部件的安全系数;在整体情况下,对铲斗施加不同的外载荷,进行工作装置的受力情况分析。
参考文献:
[1]张栋林.地下铲运机[M].北京:冶金业出版社,2002.10
[2]高梦熊.地下装载机[M].北京:冶金业出版社,2002.4.
[3]杨晋升.铲土运输机械设计[M].北京:机械工业出版社,1984.5.
[4]王国标.地下铲运机工作装置优化设计[M].北京:机械工业出版社,1998.5.
[5]张瑞肖.ZL50轮式地下铲运机工作装置的改进[J].机械产品与科技,2005,1(1):29-30.
作者简介:
郑东梅,女,1977年6月生,硕士研究生,多年从事自动检测技术、自动控制原理、数控技术的教学和研究。