三相异步电动机的电磁噪音分析和控制
对电机振动噪音的分析与控制
对电机振动噪音的分析与控制
刘效 刚
【 佳木斯 电机股份有限公司 。黑龙江 佳木斯 1 5 4 0 0 2)
声的重要 因素之一 。因此 ,进一步提高转子 的转动平衡精确度 ,能 够在 一定程 度上有效解决 电 机 振动,从而将振动噪声控制在可被接 能进行 生产、传输、使用的重要机械 ,在 电能的发展 中始终 占据着 受的范围之内。主要可 从以下 几个方面入手 : 举足轻重的重要位置 。然而 ,随着 电机在 日常生 活的广泛 的应 用, 首先 ,尽可能使转子各部位 的平衡量分布 更为 均匀。也就是说 电机振 动噪声也俨 然成为环境污染 的一 大公 害。 因此 ,为 了创造更 在实际旋 转时,为 了尽 可能减 小离心力,我 们应 该至少选择 2个校 为舒 适的工作 生活环境 , 提 高生产率 的同时 , 保证A . 4 1 " 1 的身・ 健康 , 正面。同时 ,为 了获得更好的平衡效果 ,其所选择 的支点应尽量靠 就必须对电机振动噪音采取一定的措施 ,以便将其控制在 可到 允许 近轴承挡 。而校正面 内平衡配重量 的所在位置 半径 ,则应 该尽可能 的范 围之 内。所 以,本文笔者 结合 个人 实践 工作 经验 ,对电机振动 偏大 ; 噪声进行粗浅的分析 , 并提 出几点解决与控 制电机 噪声的个人建议 , 其次 ,尽可 能提高平衡机 的转速 。随着转 速与径的不同,风扇 鼓风时的不平衡径 向力也有所变化 。因此,为了提高转子动平衡实 以供参考。 验 中的精确度 ,则应该在 可能 的情况 下,提 高平衡机的转速, 已获 【 关键词 】电机 ;振动噪音 ;控制 得更为准确 的数据 ; 前 言 再次 ,在转子 结构 设计 中加 强对 对称性与同轴度的设计 ,从而 近些年来 ,工业噪音 、污水 、废气早 已成 为污 染环 境的三大公 保证转子动平衡 。尤其 是实际加工中,在条件允许的情况下,对风 害 ,严重影响着人们 的身 心健康 。尤其 是伴 随着 电能的广泛应 用与 ห้องสมุดไป่ตู้ 与绕组支 承的圆周、平 面应 进行加工,而非加工平面也应该保持 快速发展 ,电机振动 噪音俨然 已经 成为 工业早已的重要组成部分。 光滑平整 ,从而进 一步保证 同轴度 ; 因此 ,如何 降低 电机 的振动 噪音 ,早已成 为电机 行业 普遍 面临的共 最后 ,在钢 片冲制与铁芯叠压过程中 ,应严格遵守工艺规程 , 同问题 。以下笔者 即结合个人 实践工作 经验 ,对 引发电机振动噪音 尽可能的减 小由于硅钢 片的厚薄不均匀与毛刺过大所 引起 的不平衡 的原 因进行粗浅 的探 讨,并提出几点解 决并控制电机 振动噪音的个 量 。 人建议 ,以期将 电机 振动噪音控制在可允许范围之内 ,为人们提供 2 . 2从 电机 自身结构入 手防止振动噪音 更为舒适 的工作 、生活环境 。 为了更好的解决与控制 电机振动噪音 ,就应该 从电机 自身问题 1引发电机振动噪音的原因 找起,进 而实施 全面控 制。 1 . 1 由于电机轴承与 电机转子 不平衡所 引发 的振动 噪音 首先 ,从 电机 的设计上入手 。选择适 当的槽数 进行 组合;采用 通过分析我们可 以得知 , 电机主要 由电气与机械两个部分构成 特殊槽;斜槽化 ;选择合适的线圈节距 ;正 弦波绕线 ;采 用分数槽 因此 ,电机 在分析电机故障时应该对其一分为二 。一般情况下 ,电 绕线;齿、气隙 、轭铁部 的磁通密度应适 当;转子槽部极 和厚度均 机的振 动噪音主要是 由转动部分不平衡 、机械故障或者 电磁方面 的 等 ;采用磁性楔 ,扩大气隙 ;其次 ,从 电机机械 设计上入 手。在 电 原因造成的 。所 以,对 电机轴承及 电机转子不平衡所 引发 电机振动 机 的机械设计上 ,应该采用全 闭槽 ,来消 除齿尖 厚度的不 同,从而 噪音进行分析尤为重要。 目前 ,我们常见的转动不平衡 ,主要表现 提高制造技术 。同时 ,为 了避 免和 电动机 的装置机 构发生共振 ,在 在转子、联轴器、耦合器、传动轮 ( 制动轮) 的不平衡 。其 中,由轴 定子铁心或者轴承的支持部位 ,应设计支持 防振 ,提高振 动弹性 。 承所引起的不平衡,通常会伴有异常声响 , 而 由转子 引起 的不平衡 , 并且在 电动机的外部 ,则因该设置遮音或者防音的机械构造。 则需要测量单转 电机 的振动值 。此外 ,由于转动部分 的机械松动 也 最后 ,从 电机 的使 用上入手。在实际使用中 ,我们 以电磁 电机 会造成转动部分的不平衡 例如 :铁心支架 的松动 ,斜键 、销钉 的 为例 。而通过研 究,我们可 以得知 并不是所 有电动机的电机振动噪 失效松动,转子绑扎的不紧等。 音 问题 ,都是 由电磁 力波所 引起的。有些则是由定子或者转子 的自 1 . 2 由于机械部分故障所引发的振动噪音 然 电机振动数 一致或 者接近 ,而形成的共振 。因此 ,在分析引发 电 机械部分故障所 引发的振动噪音 ,主要表现在 以下几个方面: 机振动 噪音因素时,应多了解 电动机各部分 电机振动体 的自然振动 第一 ,由于与 电机相连 的齿轮和联轴器存 在问题 ,以至于在 实 频 率 。 际作业 中极 易出现 以下几种故 障,造成 一定程度 的振 动噪音。如: 3 结 束 语 齿轮 的咬合不 良;轮齿磨损严 重;联轴 器歪斜 、错 位;齿式联轴器 综上所述 ,本文笔者对 引发 电机振动噪音 的原 因进行粗浅 的探 的齿形 、齿距不对 、间 隙过大 、磨损严重等 问题 讨,使 我们更加清楚的认识到 ,随着 电能成为现代化 的重 要能源 之 第二 ,在 电机 的安装过程 中,由于安装不当、对中不 良,造成 电机振 动也俨然 成为工业噪音的重要组成部分 ,严重影响 到人 联动部分 的轴系 不对 中,中心线不重合 ,定心不正确 ,进而引发振 们的工作与生活 。因此, 电机企业在生产 中,更应该针对 电机振 动 动 噪音 。此 外,在 实际作 业中,往往有些联动部分的 中心线在冷却 噪音这一重要 问题,进行必要 的研 究与分析 ,制 定更为完 善的设计 时是重合 一致 的,但经过 一段 时间的运 行以后, 由于转子支点 、基 以及工艺生产流程,从而将 电机噪音控制在可允 许范围之 内,为人 准等发生变形 ,导致 中心线被破坏 ,从而产生振动噪音。 们提供更为舒适的工作 、生 活环境 。 第三 ,由于 电机拖动的负载产生的振动, 所 引发 的传 导性振动 。 参考文献 : 如:水泵 、风机振动 ,所 引发 的电机振动 。 f 1 1 郭 少英. 电机噪声的分析和控制Ⅱ 1 . 中小型 电机. 1 9 9 9 ( 0 1 ) 第四,由于电机本身结构存在缺陷或者在基础安装过程 中存在 f 2 1 齐辉, 李永辉, 段 建刚. 电机噪声的类 别、分析 方法以及 防治措施的 问题,以至于引发振动噪音。主要表现为:转轴弯 曲,轴颈椭 圆, 研 究进展 f I ] . 微特 电机 . 2 0 0 7 ( 0 3 ) 轴与轴瓦间的间隙过大或者过小;整个 电机安装基础 的刚度不够 ; [ 3 】 王 爱玲 , 王 军华 . 电机 噪 声分 析 与 降噪措 施 Ⅱ ] . 平 顶 山工 学 院 学 电机和基础板间固定不牢 ,底脚 的螺栓松动 ,轴承座和基础板之 间 报, 2 0 0 5 ( 0 3 ) 松动。 而特别值 得我们 注意的是, 由于轴与轴 瓦间的间隙过大或者过 【 4 】 王春潮, 周宏志- 电机噪声 问题的探讨卟 纺 织机械, 2 0 0 3 ( 0 6 ) 小,不仅会引起 电机振动 ,还会使轴瓦 的润滑与温度产生异常 ,带 【 5 】 吴卫华, 陈吉芳. 浅谈 电机噪 声的形成及 实际控制 方法卟 机 电产品 来 电气故障。 开 发 与创 新, 2 0 0 3 ( 0 3 ) 2解 决并控 制电机振动噪音的几点个人建议 作 者简 介 : 2 . 1进一步提高转子的转动平衡精确度 刘效刚 ,出生于 1 9 7 3年 6月,毕业于黑龙江矿业学院机械设计与制 通过上述分析 ,我们可 以看 出,转动不平 衡是 引发电机 振动噪 造专业 ,现就职 于佳木斯 电机股份有 限公司 ,从事 电机工艺工作
三相异步电动机噪声标准
三相异步电动机噪声标准三相异步电动机广泛应用于工业、建筑和家庭等各个领域,其噪声问题一直受到人们的关注。
噪声不仅影响人们的生活质量,还可能对人们的健康产生负面影响。
因此,了解三相异步电动机的噪声标准及其控制方法,对于提高电动机的性能和减少对环境的影响具有重要意义。
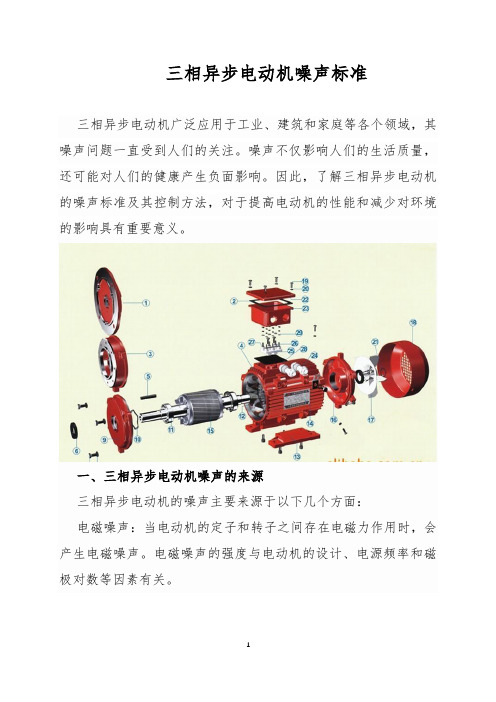
一、三相异步电动机噪声的来源三相异步电动机的噪声主要来源于以下几个方面:电磁噪声:当电动机的定子和转子之间存在电磁力作用时,会产生电磁噪声。
电磁噪声的强度与电动机的设计、电源频率和磁极对数等因素有关。
机械噪声:机械噪声主要由轴承摩擦、风叶振动、不平衡力等引起。
其中,轴承摩擦是由于轴承损坏、润滑不良或轴承与轴配合不良等原因造成的;风叶振动则与风叶设计不合理、不平衡或受到外力影响有关。
空气动力噪声:当电动机运行时,风叶或其他转动部件会与空气产生相互作用力,从而产生空气动力噪声。
空气动力噪声的强度与风叶的形状、转速以及电动机的通风方式等因素有关。
二、三相异步电动机噪声标准为了降低三相异步电动机的噪声,需要制定相应的噪声标准。
目前,国际上通用的三相异步电动机噪声标准主要包括以下几个方面:欧盟标准:欧盟对三相异步电动机的噪声标准制定了相应的法规,规定了电动机在不同功率、转速和电压下的最大声功率级。
这些标准包括EN 50310、EN 50311和EN 50312等。
中国标准:中国也制定了相应的三相异步电动机噪声标准,标准号为GB 10069-2008。
该标准规定了电动机在额定转速下的声压级上限值。
美国标准:美国电气制造商协会(NEMA)也制定了相应的三相异步电动机噪声标准,标准号为NEMA MG-1-2012。
该标准主要规定了电动机在空载和负载条件下的声功率级。
三、三相异步电动机噪声控制方法为了降低三相异步电动机的噪声,可以采用以下几种控制方法:优化电动机设计:通过优化电动机的结构设计和参数选择,降低电磁噪声和机械噪声。
例如,采用新型的电磁材料、改变磁极对数或优化风叶设计等。
三相异步电动机振动标准

三相异步电动机振动标准
三相异步电动机的振动标准包括峰值振动值和有效振动值,振动速度的单位是毫米/秒。
峰值振动值的限制范围为0.28mm/s~5.6mm/s,而有效振动值的限制范围为0.2mm/s~4.0mm/s。
另外,电机的振动频率应在5Hz~1kHz之间。
不同级别的三相异步电动机,电机轴承的振动速度也不同。
具体如下:
•A级电机:电机轴承的振动速度应小于等于6.3毫米/秒。
•B级电机:电机轴承的振动速度应小于等于12.5毫米/秒。
•C级电机:电机轴承的振动速度应小于等于25毫米/秒。
•D级电机:电机轴承的振动速度应小于等于50毫米/秒。
以上内容仅供参考,建议查阅关于三相异步电动机振动的专业书籍或咨询专业人士获取更准确的信息。
电动机的噪音与振动控制技巧
电动机的噪音与振动控制技巧近年来,随着工业化的快速发展,电动机在各个领域的应用日益广泛。
然而,电动机在运行中常常会产生噪音和振动,给人们的生活和工作带来不便。
因此,掌握电动机的噪音与振动控制技巧显得尤为重要。
本文将深入探讨电动机噪音与振动控制的各种方法和技术。
一、降低电动机噪音的技巧1. 优化设计:良好的电动机设计是降低噪音的首要因素。
通过合理的结构设计和选择适当的材料,可以减少摩擦、冲击和空气动力学噪音的产生。
同时,也要合理安排设备的布局,尽量减少共振的可能性。
2. 减少机械振动:机械振动是电动机噪音的主要来源之一。
利用合适的减振装置,可以有效减少机械振动的传递和辐射。
常用的减振装置包括橡胶垫、减震脚等。
为了降低振动,还可以使用均布质量、加厚转子、提高轴承精度等方法。
3. 降低电磁噪音:电磁噪音主要由电磁场的变化引起。
通过合理的线圈设计和电磁屏蔽措施,可以有效减少电磁噪音的产生。
另外,注意降低电流的谐波含量和频率,也可以减少电磁噪音。
4. 隔声与吸声:采用隔声与吸声材料,可以有效减少电动机噪音的传播和反射。
常见的隔声材料有吸声板、隔音棉等。
通过布置隔声罩、吸声垫片等,可以进一步降低噪音。
二、控制电动机振动的技巧1. 动平衡处理:电动机的转子在加工和装配过程中难免存在不平衡。
采用动平衡处理,可以有效减少转子振动。
动平衡的方法有静态平衡和动态平衡,根据实际情况选择适合的方法进行处理。
2. 谐振频率的避开:在电动机的运行过程中,避免接近或触发谐振频率。
通过合理的频率分析和调整运行参数,可以减少振动的发生。
3. 引入减振器:对于振动较大的电动机,可以考虑引入减振器。
减振器一般是通过吸收和分散振动能量来减少振动的传递。
常见的减振器包括弹簧减振器、液压减振器等。
4. 加强维护与保养:定期检查和维护电动机,及时更换磨损的零部件,保持电动机良好的工作状态。
定期对电动机进行润滑和冷却,也有助于控制振动的产生。
总结:通过优化设计、减少振动、降低噪音、引入减振器等措施,可以有效控制电动机的噪音和振动。
三相异步电动机控制方式

三相异步电动机控制方式引言三相异步电动机是工业中常用的一种电动机类型,其控制方式多种多样。
本文将对三相异步电动机的控制方式进行全面、详细、完整地探讨。
直接启动控制方式直接启动是最简单、最常用的三相异步电动机控制方式之一。
它的原理是将电动机直接连接到电源,通过开关将电动机启动或停止。
直接启动控制方式的特点如下:1.简单易行:直接启动控制方式不需要额外的控制设备,只需要一个开关即可实现电动机的启动和停止。
2.能耗较高:由于直接启动时电动机的起动电流较大,所以会导致较高的能耗。
3.对电动机和电网冲击较大:直接启动时,电动机的起动电流会对电网造成较大的冲击,容易引起电网电压的波动。
磁力起动器控制方式磁力起动器是一种常用的三相异步电动机控制设备,它通过控制电磁铁的吸合和断开来控制电动机的启动和停止。
磁力起动器控制方式的特点如下:1.起动电流小:磁力起动器通过控制电磁铁的吸合和断开,可以减小电动机的起动电流,降低能耗。
2.对电动机和电网冲击较小:磁力起动器可以通过控制电磁铁的断开和吸合,减小电动机启动时对电网的冲击。
3.需要辅助设备:磁力起动器需要额外的控制设备,如热继电器、过载保护器等,以保证电动机的安全运行。
变频器控制方式变频器是一种能够调节电动机转速的控制设备,通过改变电源频率来改变电动机的转速。
变频器控制方式的特点如下:1.转速调节范围广:变频器可以实现对电动机转速的精确调节,转速范围广,适用于不同的工况要求。
2.节能效果好:变频器可以根据实际负载情况调节电动机的转速,减小能耗,提高能源利用效率。
3.控制精度高:变频器控制方式可以实现对电动机转速的精确控制,满足不同工况下的控制需求。
变频器控制方式的工作原理变频器控制方式通过改变电源频率来改变电动机的转速,其工作原理如下:1.电源输入:将电源输入变频器,变频器将电源的直流电转换成交流电。
2.逆变器输出:变频器通过逆变器将直流电转换成交流电,交流电的频率可以通过变频器进行调节。
动车组异步牵引电机的电磁噪声分析与控制策略
动车组异步牵引电机的电磁噪声分析与控制策略引言:近年来,随着高铁的快速发展,动车组异步牵引电机作为其重要的动力装置,具有功率大、效率高、使用寿命长等优点,被广泛应用于高铁列车中。
然而,由于电机的工作原理和特点,其产生了一定的电磁噪声。
这种噪声不仅对列车乘客的乘坐舒适性产生影响,还对列车设备的正常运行和使用寿命造成威胁。
因此,研究动车组异步牵引电机的电磁噪声分析与控制策略具有重要的实际意义。
一、动车组异步牵引电机的电磁噪声特点动车组异步牵引电机由于其结构和工作原理的限制,产生了一定的电磁噪声。
具体而言,主要体现在以下几个方面:1. 磁场噪声:当电机的转子与定子之间存在间隙时,磁场会引起转子和定子之间的磁力作用,导致磁场产生震动,产生噪声。
2. 电流噪声:在电机工作过程中,由于电机内部磁场的变化,导致定子和转子上的电流不稳定,形成电流波动,从而产生噪声。
3. 空气动力噪声:在电机运行时,由于电机旋转产生的气流扰动,使得周围空气形成涡流,产生噪音。
二、动车组异步牵引电机电磁噪声分析方法针对动车组异步牵引电机的电磁噪声问题研究,可以采用以下几种分析方法:1. 数值仿真方法:基于有限元分析原理,通过建立电机几何模型和电磁场模型,计算电机内部的磁场分布和磁动力特性,进而分析电磁噪声的产生机理。
2. 实验测试方法:利用专业的测试设备,通过安装传感器和探头,对电机的电磁噪声进行实时测试和监测,获取电机在不同工况下的噪声特征。
3. 模态分析方法:通过对电机结构进行有限元模态分析,得到电机不同频率下的振动模态,进而分析各振动模态对噪声产生的影响。
三、动车组异步牵引电机的电磁噪声控制策略为了减少动车组异步牵引电机的电磁噪声,可以采取以下几种控制策略:1. 结构优化:通过改变电机的结构参数,如减小间隙、增加密封件等,来减少磁场和空气动力噪声的产生。
2. 材料优化:选择具有减振降噪特性的材料,如橡胶、泡沫塑料等,来减少振动和噪声的传导。
三相异步电机弱磁

三相异步电机弱磁三相异步电机弱磁控制:原理、问题与解决方案一、弱磁控制的原理三相异步电机是一种广泛应用于工业和家庭用电动机的设备。
其工作原理基于电磁感应定律,通过气隙中的磁场与转子电流相互作用产生转矩,从而驱动转子旋转。
在异步电机中,磁场是由电源电压产生的,因此调节磁通也就意味着调节电压。
然而,单独改变磁通是不可能的,因此需要采用弱磁控制来达到调速的目的。
弱磁控制主要是通过调节电机的磁通来达到调速的目的。
当电机转速升高时,反电动势也会随之增加,导致定子电流减小。
此时,如果保持电压不变,则磁通会相应减小,导致电机转速进一步升高。
为了保持电机的转速稳定,可以通过降低电源电压来减小磁通,从而实现弱磁控制。
二、弱磁控制的问题在进行弱磁控制时,电压扩展区域可能存在两个问题:过调制导致的转矩脉动和电压裕度不足导致的电机动态性能下降。
过调制是指电机在低速时产生的转矩脉动过大,这会影响电机的平稳运行。
而电压裕度不足则是指在电机高速运行时,逆变器的母线电压已经达到极限值,无法再继续升高,从而限制了电机的动态性能。
三、解决方案为了解决这些问题,通常会通过降低异步电动机的磁链来实现弱磁控制。
降低磁链可以减小反电动势,从而降低定子电流和转矩脉动。
此外,电机的运行状态主要受限于逆变器的母线电压与逆变器所能承受的最大电流。
因此,需要进行相关的技术控制,使电机的运行状态束缚在有限的范围内,同时又能满足转矩和转速的输出需求。
四、总结三相异步电机弱磁控制是电机调速中的一种重要方法。
通过降低电源电压来减小磁通,可以实现电机的调速。
然而,在弱磁控制过程中,需要注意过调制和电压裕度不足等问题,并采取相应的解决方案来提高电机的性能和稳定性。
异步电机电磁噪声分析与控制
异步电机电磁噪声分析与控制摘要:异步电机电磁噪声产生电磁噪声的主要原因是因为气隙磁场谐波的存在,针对谐波产生的途径可以在电机设计时采取相应的控制措施。
关键词:电磁噪声;异步电机;谐波1引言异步电机噪声主要有电磁噪声、通风噪声、机械噪声等,其中电磁噪声影响最大,在电机设计时应给予慎重考虑,通风噪声是气体在电机的散热系统中产生的鸣笛和哨鸣噪声,机械噪声主要是由于电机部件摩擦、几何形状不规则,如气隙偏心、转子不平衡、不对中等产生的噪声。
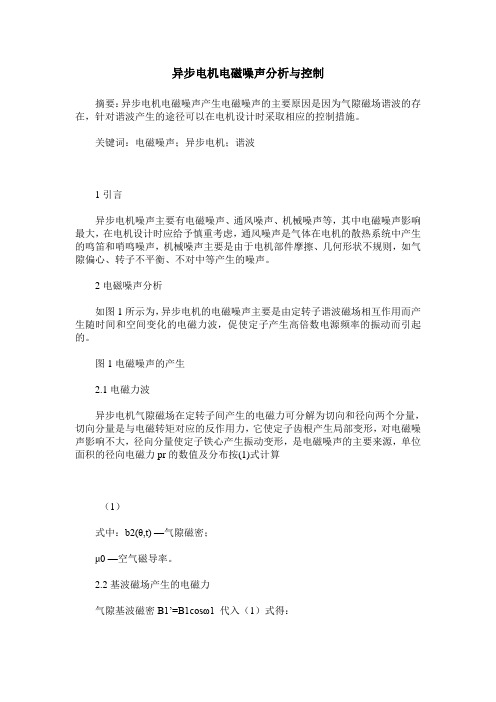
2电磁噪声分析如图1所示为,异步电机的电磁噪声主要是由定转子谐波磁场相互作用而产生随时间和空间变化的电磁力波,促使定子产生高倍数电源频率的振动而引起的。
图1电磁噪声的产生2.1电磁力波异步电机气隙磁场在定转子间产生的电磁力可分解为切向和径向两个分量,切向分量是与电磁转矩对应的反作用力,它使定子齿根产生局部变形,对电磁噪声影响不大,径向分量使定子铁心产生振动变形,是电磁噪声的主要来源,单位面积的径向电磁力pr的数值及分布按(1)式计算(1)式中:b2(θ,t) —气隙磁密;μ0 —空气磁导率。
2.2基波磁场产生的电磁力气隙基波磁密B1’=B1cosω1 代入(1)式得:是常数项,它是作用在定子铁心及转子铁心上均匀分布的力系,只影响铁心静态变形而不产生噪声。
是基波磁场产生电磁力的交变部分,它是力的行波。
它使定、转子产生两倍电源频率的振动及噪声。
2.3 5次谐波产生的电磁力是5次谐波产生电磁力的交变部分,它使定、转子产生10倍电源频率的振动及噪声。
2.4 7次谐波产生的电磁力是7次谐波产生电磁力的交变部分,它使定、转子产生14倍电源频率的振动及噪声。
基波引起的振动频率低,产生的两倍电源频率的电磁噪声是不显著的,5次谐波和7次谐波引起的振动的幅值和频率较高,由振动产生的噪声也比较显著。
2.5 定、转子谐波相互作用产生的力波Pvu定、转子绕组谐波磁场相互作用产生的径向力为其中2bvbu项对电磁噪声的影响很大。
电动机转速对振动与噪声的影响分析
电动机转速对振动与噪声的影响分析绪论在工业生产和日常生活中,电动机被广泛应用于各个领域,例如制造业、交通运输、家用电器等。
然而,电动机运行时产生的振动与噪声问题也随之而来。
振动与噪声不仅对设备性能和寿命产生负面影响,而且可能对人体健康造成影响。
因此,了解电动机转速对振动与噪声的影响是重要的。
1. 振动与噪声的来源振动与噪声的产生源自电动机内部和外部的各种因素。
内部因素包括电动机内部机械部件的运动不平衡、轴承故障、电机定位不当等。
外部因素包括与电动机相连的设备结构、供电系统不稳定、环境温度和湿度等。
这些因素的综合作用会导致电动机的振动与噪声水平的增加。
2. 电动机转速与振动的影响关系电动机转速是影响振动的重要因素之一。
通常情况下,电动机转速越高,振动水平也会相应增加。
这是由于高速旋转的部件会引起机械不平衡,从而导致振动的增加。
此外,电动机转速还会影响电机的动力学特性,进一步增大振动的程度。
因此,在设计和使用电动机时,需考虑其转速范围以控制振动的水平。
3. 电动机转速与噪声的关系电动机转速对噪声也具有重要的影响。
在电动机运行过程中,机械部件的高速旋转会引起空气的湍流和流体动力学噪声。
这种噪声源自电动机周围的气体和液体,并随着电动机转速的增加而增加。
此外,电动机转速还会导致电机内部电磁噪声的变化,进一步影响噪声的水平。
因此,控制电动机转速可以有效降低噪音水平。
4. 电动机振动与噪声的控制措施为了降低电动机振动与噪声水平,可以采取一些控制措施。
首先,通过精确制造和装配电动机件,减小机械部件的不平衡和磨损,可以有效减少振动与噪声的产生。
其次,采用合适的轴承和减震装置,可以降低振动的传递与辐射。
此外,通过优化电动机结构和控制算法,可以降低电机内部的振动与噪声水平。
最后,对电机及其周围环境进行隔音与隔振处理,可进一步减小振动与噪声的影响范围。
5. 实例分析为了进一步验证电动机转速对振动与噪声的影响,我们进行了一项实验研究。
三相异步电机电磁噪音产生原因和解决方案
三相异步电机电磁噪音产生原因和解决方案-概述说明以及解释1.引言1.1 概述概述:三相异步电机是工业生产中常见的一种电机类型,其在运行过程中会产生一定的电磁噪音。
电磁噪音不仅会影响生产环境的舒适性,还会对电机本身和周围设备造成一定的影响。
因此,研究三相异步电机电磁噪音产生原因和解决方案具有一定的理论和实际意义。
本文旨在通过对三相异步电机电磁噪音产生原因和解决方案进行深入剖析,为相关研究和生产实践提供参考和指导。
1.2 文章结构本文将分为引言、正文和结论三个部分。
在引言部分,将对三相异步电机电磁噪音产生原因和解决方案进行概述,并介绍本文的目的。
在正文部分,将详细讨论三相异步电机电磁噪音的产生原因和影响,以及针对电磁噪音问题的解决方案。
在结论部分,将对本文进行总结和展望,以及得出结论。
整个文章将以逻辑清晰、条理性强的方式展现三相异步电机电磁噪音产生原因和解决方案的相关内容。
1.3 目的本文的目的在于探讨三相异步电机电磁噪音产生的原因以及影响,并提出解决方案。
我们将深入研究电动机在运行过程中产生的电磁噪音,分析其产生机理,并探讨对环境和人体健康所带来的影响。
最终,我们将提出有效的解决方案,以减少电机电磁噪音对周围环境和人们生活的影响。
通过本文的研究,我们希望能够为相关行业提供参考,改善电机产品的设计和制造,减少电磁噪音的产生,提升电动机的环境友好性和使用体验。
2.正文2.1 三相异步电机电磁噪音产生原因三相异步电机在运行过程中会产生不同程度的电磁噪音,其主要产生原因包括以下几个方面:1. 磁场不均匀性:由于电机铁心、绕组、空气隙等部件的制造和安装精度有限,导致电机内部磁场的分布不均匀,从而产生磁场不均匀性,使得电机在运行时产生振动和噪音。
2. 空气隙磁场激励:在电机运行过程中,磁铁和绕组之间的空气隙会产生磁场激励,这种激励会引起空气隙中的磁场不稳定,从而产生电磁噪音。
3. 磁场饱和:当电机工作在超载或怠速状态时,磁场可能会饱和,造成磁感应强度增大、磁通密度不均匀分布,导致电机产生电磁噪音。
三相异步电动机电磁噪声的控制
22 适 当增大 电机 的气隙 .
电动机 气 隙的大 小对 电磁 噪声 的影响 为
,】一 L2— 4 L 占 , ) . 0 x ( 2 占I 4 () 1
谐 波的绕组 系数下 降 . 具体 数值 见表 1 。
表 l 三相绕组基波和 高次谐波的分 布系数
从式 中看 出适 当 的增大 电机 的气 隙可 有效 的 降低 电磁 噪声 , 同时 , 隙 越 小 , 气 装配工 艺要 求越
高 , 则 容 易 1 气 隙 不 均 匀 , 致 电 机 的 单 边 磁 否 起 导
拉力 。率 厂生产 YVP 1 M 1 2 6变频 电机 , 初期 设计
一
匀 , 改 为 0g m 重 新设 计则 电机噪 声 明显下 降 。 d .r a
维普资讯
相 l 电动 机 电磁 噪 声 的控 制 异步
《 中小 型 电机  ̄0 2 2 () 2 0 ,9 2
现场 测试表 明 , 当加大 电机 的气 隙能够 消化装 配 适
三相 异步 电动机 噪声 斜 槽
瞄 健 1 7 9 1年 生 . 9 3 1 9
El c r m a ne i o s nt o o r a l e to g t c N i e Co r l f r Va i b e Fr qu nc e e y Thr e p s s nc o u o o e — ha e A y hr no s M t r
我 厂 牛 产 的 变 频 电 机 YvP 8 L 8初 期 定 子 0 L
1 月 q吾
冲 片使用 4 8槽 ( 一2 . 改为 7 q )后 2槽 ( :3 , 比 q )对
使 用效果如 表 2
表 2 不同定 子槽数噪声对比
三相异步电动机的电磁噪音分析和控制

三相异步电动机的电磁噪音分析和控制三相异步电动机的电磁噪音分析和控制 1.引言 Y、Y2系列三相异步电动机应用于各行各业,其负载噪音指标方面与国外产品相比尚有较大差距。
特别是2极高速中小型电动机的电磁噪音已超出国际贸易和国内特殊行业的最低要求。
产品出口和国内特殊行业的应用受到严重影响。
本文定性加简单的量化分析,阐明2极电机电磁噪音超标的原因及解决方案。
2. 噪音分类异步电动机的噪音分三类:电磁噪音、空气动力噪音和机械噪音。
空气动力噪音源于异步电动机的风扇通风噪音。
由于空载和负载的转差非常小,从空载到负载通风噪音几近定值。
因此,对于空载噪音达标而负载噪音超标的2极高速电机,通风噪音不是电磁噪音超标的主要原因。
机械噪音主要是由轴承噪音引起的。
对于工艺成熟的Y、Y2系列电机,从降低机械噪音方面来使电磁噪音达标也是不明智的。
电磁噪音是由于电机气隙中各次谐波磁场引起的交变电磁力引发铁心及其相联的机械构件中的振动和共振。
采取更趋合理的方案是完全可以做到的。
3. 电磁噪音产生原因 3.1气隙谐波磁场。
气隙谐波磁场由电机绕组的磁势作用于电机气隙而产生的。
因此,分析绕组磁势即可阐明气隙谐波磁场的产生原因及对电磁噪音的影响。
电机学理论表明:电机的单相绕组其磁势是脉振磁势,磁势波形为非正弦波,内含丰富的高次谐波磁势。
单线圈磁势对于单线圈磁势,其磁势可表示为:式中: Nc 槽内导体数,即线圈匝数 Ic 导体电流i的有效值线圈组磁势对于每极每相槽数q为整数的q个线圈组v 次谐波幅值为: Fqv=qFcv kqv (2)其中 1为线圈分布的基波电角度值,kqv称为分布系数,线圈组v次谐波磁势幅值为: Fmqv= 2 2qIcNcvp kwv (4)式中:kwv=kyv kqv 是v次谐波的绕组系数。
相绕组磁势相绕组磁势可由线圈组的v次谐波磁势按其空间位移和电流方向用矢量法相加而得到。
F (t,)= 2 2Iwp [kw1cos + 13(Kw3cos3 )+ 15 (Kw5cos5 )+ + 1v (Kwvcosv )]sinwt (5)式中: w =电流角频率,即基波磁场角频率。
三相异步电动机的调速控制-变极调速电磁调速
三相异步电动机的调速控制-变极调速电磁调速变极调速不能实现连续平滑调速,只能得到几种特定的转速。
但在很多机械中,要求转速能够连续无级调节,并且有较大的调速范围。
目前除了用变频器进行无级调速外,还有较多用调电磁转差率进行的调速,也就是电磁转差离合器调速,其优点是结构简单、维护方便、运行可靠、能平滑调速,采用闭环系统可扩大调速范围;缺点是调速效率低,低速时尤为突出,不宜长期低速运行,且控制功率小,机械特性较软。
1.电磁转差离合器的结构及工作原理电磁转差离合器调速系统是在普通笼型异步电动机轴上安装一个电磁转差离合器,由晶闸管控制装置控制离合器绕组的励磁电流来实现调速。
异步电动机本身并不调速,调节的是离合器的输出转速。
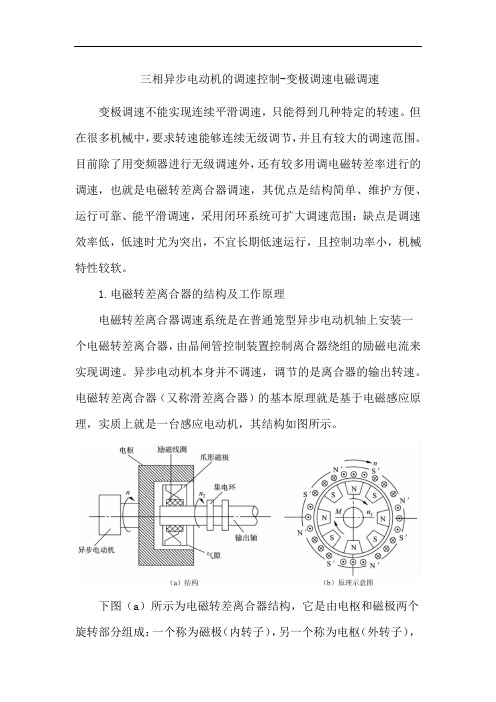
电磁转差离合器(又称滑差离合器)的基本原理就是基于电磁感应原理,实质上就是一台感应电动机,其结构如图所示。
下图(a)所示为电磁转差离合器结构,它是由电枢和磁极两个旋转部分组成:一个称为磁极(内转子),另一个称为电枢(外转子),两者之间无机械联系,均可自由旋转。
当磁极的励磁线圈通过直流电流时,沿气隙圆周表面的爪极便形成若干对极性相互交替的空间磁场。
当离合器的电枢被电动机拖动旋转时,由于电枢与磁场间有相对移动,在电枢内就产生涡流;此涡流与磁通相互作用产生转矩,带动磁极按同一方向旋转。
无励磁电流时,磁极不会跟着电枢转动,相当于磁极与电枢“离开”,当磁极通入励磁电流时,磁极即刻跟随电枢旋转,相当于磁极与电枢“合上”,故称为“离合器”。
因它是根据电磁感应原理工作的,磁极与电枢之间必须有转差才能产生涡流与电磁转矩,故又称“电磁转差离合器”。
因为工作原理和异步电动机相似,所以又将它及与其相连的异步电动机一起称为“滑差电动机”。
电磁转差离合器的磁极转速与励磁电流的大小有关。
励磁电流越大,建立的磁场越强,在一定转差率下产生的转矩越大。
当负载一定时,励磁电流不同,转速就不同,只要改变电磁转差离合器的励磁电流,即可调节转速。
三相异步电动机常见故障分析与排除

几种主要疑难故障原因分析
A:热继电器疑难故障及原因分析 故障现象一:用电设备操作正常,但热继电器频繁动作, 或电气设备烧毁而热继电器不动作。 原因分析:①热继电器可调整部件的固定支钉松动,不在 原整定点上;②热继电器通过了巨大的短路电流后,双金 属元件已产生永久变形;③热继电器久未检验,灰尘堆积, 或生锈,或动作机构卡住、磨损、胶木零件变形;④热继 电器可调整部件损坏。(常规原因:热继电器外接线螺钉 未拧紧或整定电流值偏低一频繁动作;整定电流值过高一 起不到保护作用)。 故障现象二:热继电器动作时快时慢。 原因分析:①热继电器内部机构有部件松动;②在检修中 使双金属片弯折;③外接线螺钉未拧紧。
电动机过热,超过允许温度
③控制线路。若控制线路维护不良,触头接触不好,电动 机断相运行也会使电动机电流增大。有些设备的拖动电动 机有刹车装置,刹车装置动作配合不好,电动机堵转严重, 将使电动机过热。另外,电动机每小时启动次数过多,或 电动机超定额运行对定子发热都有影响。 ④负载原因。电动机长时间在过载下运行而保护装置又不 可靠,不能及时动作,使电动机定子电流超过额定值;电 动机与被拖动的机械联接不好、齿轮箱有污物或联轴器偏 心等使电动机空载损耗增大;电动机承受不应有的冲击负 荷;由于负荷的故障使电动机堵转等。 ⑤电动机本身故障。电动机定子绕组有短路、接地或一相 断线;修理后的电动机定子绕组接线错误;电动机转子断 条、端环开焊;电动机散热有障碍,如风扇损坏、风路堵 塞、表面污垢过多等:机械方面装配不良、转轴弯曲变形、 轴承损坏、定转子相擦等。
电动机过热,超过允许温度
异步电动机过热是较为常见的故障,其原因比较复杂,可从 电源、电动机、控制设备和负载等方面分析。 ①电源电压过高时,由U≈4.44f1w1kw1Ф可知,磁通将增 大,电动机磁路出现饱和。这时定子电流剧烈增加,使电动 机温升提高。电源电压过低时,若负载转矩已定,磁通减少 必然导致转子电流增大。这时定子电流同时增大,电动机温 升提高。 ②电源电压三相不对称。三相异步电动机需在三相对称电压 下工作,其三相电压不对称度应小于额定电压的5%。当三 相电压数值相差较大时,将使异步电动机定子三相电流不平 衡,在额定负载下,会使某相绕组电流超过额定值,使该相 绕组过热,发生异步电动机定子绕组局部过热的故障。
电机噪音解决方法
电机电磁噪声产生原因分析电磁噪声是由在时间上和空间上作变化,并由电机各部分之间作用的磁拉力引起的。
对于异步电机电磁噪声的形成的原因可以归为:(1)气隙空间的磁场是一个旋转力波,它的径向力波使定子和转子发生径向变形和周期性震动,产生了电磁噪声。
(2)气隙磁场中除了电源基波分量外,还有高次谐波分量,高次谐波的径向力波也都分别作用于定转子铁心上,使它们产生径向变形和周期震动,在一般情况下,对高次谐波来说,电动机转子刚度相对较强,定子铁心的径向变形是主要的,可能产生较大的噪声。
(3)定子铁心不同阶次谐波的变形,有不同的固有频率,当径向力波的频率与铁心的某个固有频率接近或相等时,就会引起“共振”。
在这种情况下,即使径向力的波幅不大,也会导致铁心变形、周期性震动和产生较大噪声。
(4)定子变形后引起周围空气振动,从而产生噪声。
这时,定子相当于一个声辐射器。
(5)当铁心饱和时,将会使磁场正弦分布的顶部变得平坦,在磁场分布中加大了三次谐波分量,将使电磁噪声增加。
(6)定转子槽都是开口的,气隙磁导在旋转时也是在变化和波动的。
气隙磁场中出现了很多由于槽开口引入的谐波。
降低电磁噪声的方法:(1)合理选择气隙磁密。
(2)选择合适绕组形式和并联支路数(3)增加定子槽数以减少谐波分布系数(4)合适的槽配合(5)利用磁性槽楔(6)转子斜槽电机噪声的分类根据电机噪声产生的不同方式,大致可把其噪声分为三大类: ①电磁噪声;②机械噪声;③空气动力噪声。
①电磁噪声电磁噪声主要是由气隙磁场作用于定子铁芯的径向分量所产生的。
它通过磁轭向外传播,使定子铁芯产生振动变形。
其次是气隙磁场的切向分量,它与电磁转矩相反,使铁芯齿局部变形振动。
当径向电磁力波与定子的固有频率接近时,就会引起共振,使振动与噪声大大增强,甚至危及电机的安全。
②根据麦克斯韦定律,气隙磁场中单位面积的径向电磁力按下式计算:1 式中:B——气隙磁密θ——机械角位移μ0——真空磁导率由于定、转子绕组中存在着主波磁势与各次谐波磁势,它们相互作用可以产生一系列的力波。
异步起动永磁同步电动机电磁振动特性及抑制措施的研究
微电机MICROMOTORS第53卷第1期2020年 1月V v I.23. No 1Dec. 2020异步起动永磁同步电动机电磁振动特性及抑制措施的研究唐旭,林旭梅,朱文杰(青岛理工大学信息与控制工程学院,山东青岛266525)摘 要:现有关于永磁电机电磁振动的研究主要围绕单边开槽永磁电机展开,而异步起动永磁同步电动机的定转子双边开槽、永磁体内置于转子铁心内部,导致其电磁振动特性及抑制措施的研究难度大幅增加。
本文针对异步起动 永磁同步电动机的负载运行,提岀了一种新的电磁力解析分析方法,建立了不同阶数、频率的电磁力与电机定转子齿槽参数之间的明晰关系。
利用机械阻抗法计算了电机主要低阶电磁力的电磁振动响应,并得到了对电机电磁振动 起主要作用的低阶电磁力的频率。
进一步研究了通过改变定子齿宽抑制上述主要电磁力,并得到了相应的定子齿宽确定方法,利用有限元法验证了上述抑制措施的有效性。
关键词: 异步起动永磁同步电动机;负载运行;电磁力;解析分析;抑制措施中图分类号:TM351; TM341 文献标志码:A 文章编号:101-6848(2020)1-001-06Stady of Charccteristico and Suppression Metiodo of ElectrcmagnetieViOrction in Line-stare Permaneyi Magnei Synchrcnous MotorTANG Xc, LINXumei, ZHUWenjie(School of 1/00X10100 and Control Engineering , Qingdao University f Tectnolofy ,Qingdao SSan/on/ 266525, China)Abstrcct : TFie existing resenrch oo electromaagettc vinratioo of permdgegt mdaget motoro mainVp fochses oosingle sine slotten permdgegt mdaget motors. While the resenrch oo electromaaaet-c vinratioo characte/sticr ang suppressioo methoOs of liae-sta/ perrmamt maaget sypchrogoos motoro (LSPMSM) is vero dimichlt, be-chnso of the statoo ang rotoo slcOs as welV as the inte/oc permaaegt maagets. N this paneo , a gew analytichV analysis methoO of electromaageec forcc was prooosen wien LSPMSM ooerates ungec loat. TFiis methoO chg cleerep —u OU s U the relationsoin betoeen the electromaaget-c forces of dmeregt o /—s and freguegcies angthe parametero of the teeth ang sUns of statoo ang rotoo. TFie mechanicht impegagce methoO was cseg to cht- chlate the electromaagegc vinratiog resyonso of the main U wo /cs electromaanet-c forcc of the motoo, angthe f/quegcy of the low-oraeo electromaaget-c forcc wOich playeg a major rote in the electromaagegc vinra-hon of the motoo was oOtaigeg . Furthermore , the atove electromaaget-c force was sucpresseg bp changing the teeth width of statoo , ang the cegespongmg methoO to determige the teeth width of statoo was oOtaigeg . Tiefinite eUm —t methoO was use- to veritp the effectiveness of the anove suupression methoO.Key words : UgeothO permdgegtsypchronoos motoo ; onerating ungeo loat ; ekctromaaget-c forcc ;analyticht analysis ; sucpressioo methoOo 引言电机的振动噪声主要分为三类:电磁噪声、机械噪声、空气动力噪声,其中,电磁噪声是电机振动噪声的主要来源。
电机电磁噪声的分析

电机电磁噪声的分析定转子的槽配合的选择对电磁噪音的影响很大,选择合适的槽配合是降低电磁噪音最有效、最经济的方法,因此,在选择定转子槽配合时要慎重。
要避免出现幅值较大,次数较低的力波,幅值较大的定转子齿谐波磁场由定转子槽数决定,由电机学,可知定转子一阶齿谐波作用产生的力波次数m为,m 二| Z i p 二二Z2 p '式中Z1、Z2-定、转子槽数、p-极对数定子相带谐波与转子一阶齿谐波作用产生的力波次数(对定子60相带整数槽绕组)为:m =(6Kp 十p )士(士Z 2 + p )式中K =0、1、2定转子二阶齿谐波作用产生的力波次数为:m 2Z i p j:1: 2Z2 p '在设计时,应尽量避免定转子槽配合产生较低的m,另外齿谐波幅值随转子槽数增大而减小。
因此,为了降低电机的电磁噪音,在选择定转子槽数时应采用远槽多槽配合,即Z2与Z i相差较大及Z 2 Z i,电动机二维(力波频率与力波阶次)电磁噪声理论由异步电动机气隙磁密波的作用,在定子铁心齿上产生的磁力有径向和切向两个分量。
径向分量使定子铁心产生的振动变形是电磁噪声的主要来源;切向分量是与电磁转矩相对应的作用力矩,它使齿对其根部弯曲,并产生局部振动变形,这是电磁噪声的一个次要来源;电磁噪声一般在极数较多、功率较大的电机中比较明显,并且是引起负载时噪声增大的重要原因。
三相异步电动机运行时,气隙中存在基波与一系列谐波磁场,它们相互作用除产生引起转矩的切向力外,还会产生许多高次、频率且各不相同的旋转径向电磁力波,这些径向力波作用在定转子上,使它发生径向周期性变形,即产生频率等于径向力波频率的振动,该振动传到机座,引起机座的振动,从而又使机座周围的空气脉动而引起电磁噪声,电机本身都有固有的振动频率,当径向力波频率与电机的固有频率相同或相近时,就会引起共振,产生很大的电磁噪音。
笼型异步电动机电磁噪声的频带通常为700〜4000Hz 。
三相异步电机削弱谐波的方法
三相异步电机削弱谐波的方法1.引言1.1 概述本文将探讨三相异步电机的谐波问题,并介绍削弱谐波的方法。
三相异步电机作为一种常用的电动机种类,广泛应用于各个领域。
然而,在实际应用中,三相异步电机存在着谐波问题,即由于非线性负载和电源的不完美,电机产生了具有频率为整数倍于基波频率的谐波波形。
这些谐波波形会引起电流和电压的畸变,进而影响电机的正常运行和性能表现。
对于三相异步电机的谐波问题,研究人员提出了多种削弱谐波的方法。
这些方法包括滤波器法、功率电子器件法、控制策略法等。
滤波器法通过在电机电路中加入合适的谐波滤波器,可以有效地滤除电流中的谐波成分,从而降低谐波的产生和传播。
功率电子器件法则是利用高频开关器件,如IGBT、MOSFET等,对电机电源进行调节和控制,以消除谐波波形。
而控制策略法则是通过优化电机的控制策略,如变频调速等,来消除谐波的影响。
通过研究和应用这些削弱谐波的方法,可以有效地降低异步电机产生的谐波波形,提高电机的稳定性和性能。
本文将对这些方法进行详细的介绍和分析,并探讨它们的优缺点,以期为电机领域的从业人员和研究者提供有益的参考和指导。
综上所述,本文旨在研究和探讨三相异步电机的谐波问题,并介绍削弱谐波的方法。
通过深入分析和比较,希望能为解决电机谐波问题提供可行和有效的解决方案,为电机技术的发展做出贡献。
1.2 文章结构文章结构部分的内容可以按照以下方式编写:文章结构:本文共分为引言、正文和结论三个部分。
引言部分主要包括概述、文章结构和目的方面的内容。
首先,我们将简要介绍三相异步电机的谐波问题,并指出削弱谐波的重要性。
随后,我们将描述整篇文章的结构,明确各个章节的主要内容与逻辑关系。
最后,我们将明确本文的目的,即研究和探讨削弱三相异步电机谐波的方法。
正文部分将详细探讨三相异步电机的谐波问题以及削弱谐波的方法。
首先,我们将介绍三相异步电机的谐波问题,包括形成原因和对电机运行的不利影响。
然后,我们将系统地介绍多种削弱谐波的方法,包括电机结构优化、滤波器应用、调制控制策略等方面的内容。
电机电磁干扰原因分析及解决办法
电机电磁干扰原因分析及解决办法1产生电磁干扰的原因(1)绕组中突变磁场产生干扰或老化如果通过电动机线圈绕组的电流通路切断,则线圈中的磁场突然消失,线圈上会产生上百伏,甚至上千伏的瞬变过电压。
这种电压对系统中其他电子装置产生巨大电能冲击,最终导致设备、系统的基本失控和逻辑判断出错,甚至击穿或烧毁系统中的其他机电元件。
瞬变过电压与负载的大小以及线路的阻抗有关。
(2)换向器与电刷间的火花放电。
对电刷式电动机而言,电刷和换向片之间产生火花放电,同时引起频谱极宽的噪声(从中波到甚高频波段内是连续分布的),它对无线广播、电视及各种电子设备在很大范围内造成干扰。
(3)其他。
诸多电子产品中的电动机均采用桥式整流和电容滤波电路整流后的直流电源。
因为其中整流二极管的导通角很小,只有在输入交流电压峰值附近才有高峰值的输入电流通过。
这种畸变的电流波形基本很低,但高次谐波却非常丰富,脉冲宽度约为5ms(1∕4T)o这种高峰值的电流脉冲不仅对供电电网造成严重污染,还对其他各种用电设备产生干扰。
2电路设计时电磁干扰的产生及抑制措施在电磁电路中的电磁兼容性很大范围是由线路贮藏和互相连接的成分决定的:从天线返回的信号能放射出电磁能量。
其最主要是由于电流幅值、频率和电流线圈的几何面积决定的。
通常,有3个主要的电磁干扰来源:电源、高频信号、振荡器电路。
下面分别分析产生原因及其防范措施。
首先,当1个CMOS反向换流器在改变输出状态时,两个晶闸管会有一段很短的时间同时导通。
这会使电流增长很快,导致在电源线路上出现电流尖峰,引起一段或长或短的电源线路的短路。
这被证实是产生电磁干扰的一个重要原因。
减弱电源电压的波动,使其接近1个100nF旁路电容器,是十分有效的。
然而由于电路的寄生成分,例如集成和电源线路的阻抗,旁路电容器不能有效减少电流峰值的,因此也不能减少辐射干扰。
为了抑制这些电流尖峰(至少在电源线路上),使其不扩展到其他部位,在极间耦合电容器和电源线路之间增加1个感应线圈,以方便干扰被抑制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三相异步电动机的电磁噪音分析和控制
【摘要】对三相交流异步电动机的电磁噪音,从槽配合选择、气隙谐波磁场等方面进行分析,找出引起电磁噪音的主要原因,最后提出控制电磁噪音的相关措施。
【关键词】异步电动机;气隙槽配合;谐波磁场;电磁噪音
The electromagnetism noise of three electric motor analysis and control
【Abstract】Three—phase AC induction motor electromagnetic noise from the slot with the select air gap harmonic magnetic field analysis to identify major cause electromagnetic noise,and finally put forward the measures to control electromagnetic noise.
【Key words】Asynchronous motor;Air gap slot with;Harmonic magnetic field;Electromagnetic noise
1.引言
Y、Y2系列三相异步电动机应用于各行各业,其负载噪音指标方面与国外产品相比尚有较大差距。
特别是2极高速中小型电动机的电磁噪音已超出国际贸易和国内特殊行业的最低要求。
产品出口和国内特殊行业的应用受到严重影响。
本文定性加简单的量化分析,阐明2极电机电磁噪音超标的原因及解决方案。
2. 噪音分类
异步电动机的噪音分三类:电磁噪音、空气动力噪音和机械噪音。
空气动力噪音源于异步电动机的风扇通风噪音。
由于空载和负载的转差非常小,从空载到负载通风噪音几近定值。
因此,对于空载噪音达标而负载噪音超标的2极高速电机,通风噪音不是电磁噪音超标的主要原因。
机械噪音主要是由轴承噪音引起的。
对于工艺成熟的Y、Y2系列电机,从降低机械噪音方面来使电磁噪音达标也是不明智的。
电磁噪音是由于电机气隙中各次谐波磁场引起的交变电磁力引发铁心及其相联的机械构件中的振动和共振。
采取更趋合理的方案是完全可以做到的。
3. 电磁噪音产生原因
Y160—2电机负载运行时,产生让人不易接受的电磁噪音。
为解决问题,需从电磁噪音产生机理着手,分析电磁噪音的特点及其控制办法。
3.1气隙谐波磁场。
气隙谐波磁场由电机绕组的磁势作用于电机气隙而产生的。
因此,分析绕组磁势即可阐明气隙谐波磁场的产生原因及对电磁噪音的影响。
电机学理论表明:电机的单相绕组其磁势是脉振磁势,磁势波形为非正弦波,内含丰富的高次谐波磁势。
单线圈磁势对于单线圈磁势,其磁势可表示为:
Fc(t,α)= 2π 2IcNcp Sinwt ∑∞ v=1/p,2/p…kyv VCOSvα(1)
式中:Nc——槽内导体数,即线圈匝数
Ic——导体电流i的有效值
线圈组磁势对于每极每相槽数q为整数的q个线圈组v次谐波幅值为:Fqv=qFcv ·kqv (2)
式中:kqv=sin(qvα1)/2/(qsinvα1/2)(3)
其中α1为线圈分布的基波电角度值,kqv称为分布系数,线圈组v次谐波磁势幅值为:
Fmqv= 2π 2qIcNcvp·kwv (4)
式中:kwv=kyv·kqv 是v次谐波的绕组系数。
相绕组磁势相绕组磁势可由线圈组的v次谐波磁势按其空间位移和电流方向用矢量法相加而得到。
Fφ(t,α)= 2π 2Iwp [kw1cosα+ 13 (Kw3cos3α)+ 15 (Kw5cos5α)+…+ 1v (Kwvcosvα)]sinwt (5)
式中:w =电流角频率,即基波磁场角频率。
Kyv=0 至于双层绕组磁势也不含偶次谐波。
对于正常接法的整数槽绕组,相绕组磁势幅值为:
Fmφv= 2π 2Iwvp Kwv (6)
上式表明:相绕组磁势幅值与绕组系数成正比,采用短距(y11)可有效削弱绕组中的高次谐波,这早已为Y系列电机所采用。
三相绕组磁势三相绕组空间和时间上均相差120°电角度,属正交绕组。
因此,当v=3k时(k=±1,±2,±3……),三相绕组的3k次谐波磁势为0。
即F3k(t,α)=Fφ3kCOS3kα〔sinωt+sin(ωt—2π/3)+sin(ωt—4π/3)〕=0 (7)上式表明,三相绕组中不含3倍次谐波,只含有5,7,11,……等次数
的高次谐波。
上述齿谐波,因kων=kω1,因此不能用短距分布绕组等办法加以大幅
度削弱,故其幅值较大,是电磁噪音的主要来源。
3.2电磁力波。
气隙磁场波作用于定、转子铁心,产生交变的作用力,即电磁力波。
作用在定子铁心齿上的径向力波是定子铁心振动变形的主要原因,也即是电磁噪音的主要来源。
应用麦克斯韦定律,并忽略次数为2ν和2μ的高次谐波项后,磁势谐波磁场产生的径向力波为:
Pνμ=BvBu 2μ0COS〔(μ±ν)α—(ωμ±ω1)t—(φu±φv)〕(8)
式中:γ=μ+γ 称为此力波的次数
Wγ=Wμ±w1 为力波角频率。
Φr=Φμ+Φγ为力波相位角
Bγ,Bμ分别为γ次和μ次气隙磁密幅值
定子铁心振动时,其动态变形的大小约与力波次数的4次方成反比,因此,γ=2的力波是振动噪音的主要成分,应充分考虑γ=2的力波因素。
3.3负载噪音实例分析。
Y160—2电机,数据如下:
Z1=30,Z2=26,p=1,SN=1—nN/n0=1—2930/3000=0.0233 (9)
则μZ=KzZz+p=26Kz+1 Kz=±1,±2,±3……
ν=6K1`+p= 6K1`+1 K1`=±1,±2,±3……
力波频率:μ、ν 同号时,γ=μ—ν fr=f1[kzZz(1—sn)/p]
μ、γ异号时,r=μ+γ时,fr=f1[k2*Z2*(1—Sn)/p+2]
(下转第17页)
在r=±2次力波有三对μ和γ的组合:
a. μ=—25,γ=—23,k2=—1,r=μ—γ=—2
fr=f1[k2*Z2*(1—Sn)/p]=50×(—1)×26×(1—0.0233)/1=1269.71(Hz)(10)
b.μ=+27,γ=+25,k2=+1,r=μ—γ=+2
fr=1269.71(Hz)同a.
c. μ=+27,γ=—29,k2=+1,r=μ+γ=—2
fr=f1[k2*Z2*(1—Sn)/p+2]=50×(—1)×26×(1—0.0233)/1+2=1369.61(Hz)(11)
把a,b,c三组力波频率和频谱分析图表进行比较,就会得出如下结论:在μ=27,γ=—29时,其力波次数r=—2,其力波频率和频谱分析中的尖峰和噪音频率(1369.6Hz与1376Hz)几乎相等。
这表明,在(Z1=30,Z2=26)时,其力波(r=μ+γ=—2)引起较大的电噪,从而导致负载电磁噪音超标的可能。
另外,此时a,b,c三个力波可能和机座固有频率(中小型电机为几千赫兹)比较接近,易发生共振。
若改变槽配合为Z1=30,Z2=18时,出现r=±2低次力波有两对μ和γ的组合,经计算fr相等。
fr=f1[k2*Z2*(1—Sn)/p+2]=50×(—1)×18×(1—0.0233)/1+2=779.03(Hz)(12)
由上述知:Z1=30,Z2=18时,力波频率与固有频率相距较大,引发共振的可能性减小。
从共振看,Z1=30,Z2=18优于Z1=30,Z2=26。
4. 负载噪音控制措施
从抑制各次谐波磁势幅值着手,适当增加转子斜槽度,通过电磁计算,确保各项电气性能达标的情况下取大值。
经实际计算,取1.2个定子齿距斜槽度。
从规避固有频率防止共振着手,修改槽配合。
在出口电机MG160—2设计中,采用修改后的槽配合,效果显著。
5. 结语
选择合适槽配合,可以降低异步电动机的电磁噪音,减少电机对周围环境的影响,具有很好的社会效益。
参考文献
[1]《电机学》(下)许实章主编机械工业出版社1982年版.
[2]《电机设计》(上、下)陈世坤主编机械工业出版社1983年版.
[3]《电机噪音的分析和控制》陈永校等编著浙江大学出版社1987年版.。