04空间任意力系
合集下载
理论力学L4-4 空间力系简化
c ) 一般主矢和主矩矢既不平行也不垂直 由共点矢量知,它们在同一平面内, 假设两矢量正向夹角为α。 ' FR 1) 将 M O分解为垂直于 ' ' ' 的 及平行于 F M R MO MO O " 的 MO , ' ' O M O 的大小: " FR ' MO M O M O sin
' b) 若主矢平行于主矩:FR // M o
O
MO
' 由一个力和一个力偶(且力 FR 垂直于力偶作用面)组成的
力系,称为力螺旋。 力和力偶都是基本力学量, 力螺旋不能再简化。
力偶矩矢与力矢同方向的称为右螺旋(力偶的转 向与力的方向符合右手关系);反之称左螺旋。 但一般主矢和主矩矢既不平行也不垂直。
§4-4 空间任意力系向一点简化
一、空间任意力系向一点简化 与平面任意力系向一点简化相似,空间任意力 系也是利用力的平移定理将各力平移到简化中 心 O 处,并附加矢量表示的空间力偶,则原力 系与空间汇交力系+空间力偶系等效。
MO m m1 n
F2 F’2
F’R
O
F’n
Fn
F’1 m2
F 又由于力偶矩矢是自由矢量,再将平行于 的 R '' 力偶矩矢 M o 平行移动与FR 重合,成为力螺旋。 一般情况下,空间力系简化结果是一个力螺旋。
约束类型
约束反力
数量
空 间 约 束 类 型 和 约 束 反 力
3
4
5 6
MO
F’R
对于空间汇交力系的合 ' 力FR :
O
' FR 等于该力系各力的矢量和, 称其为该力系的主矢; 对于空间力偶系的合力偶,其力偶矩矢 M O等于 各附加力偶矩的矢量和,也是力系中各力对点O 力矩矢的矢量和: MO mi mO ( Fi ) 称为该力系对简化中心O点的主矩。
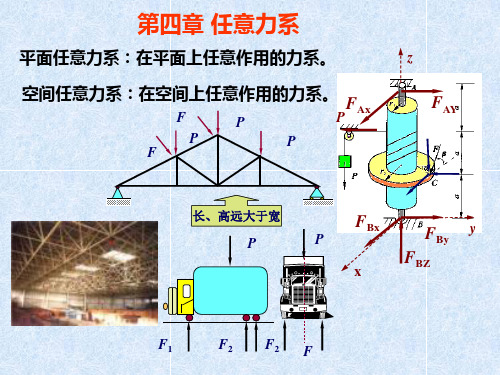
第四章 任意力系 (同济)

F Rz FR
M
0
m ix m iy m iz
2 2 2
'
Mz=miz,
M M
, cos
M M
y 0
, cos
M M
z 0
简化结果讨论:
1、主矢 F R 0 而主矩 M O 0
FR 0
合力偶 与简化中心无关
这种情况下,简化结果将不因简化中心位置的不同而改变。
1 2
r d,
2
C
x
A
α
d A
-α
α
1 2
α
r d θ r α,
2 2
y d
r
dS
xC
1 r
2
2 3
r cos (
1 2
r )d θ
2
2 3
r sin α ,
x
2 3
rcos
x
如:=/2, 则:xc=(4r/3)
例4-3:图示槽钢横截面,求:此截面重心的位置。 解:取对称轴故yc=0,再分割成有规律的几个物体 A1=30•10=300cm2, x1=15cm; A2=20•10=200cm2, x2=5cm; A3=30•10=300cm2, x3=15cm;
M0 FR 0 y
FRx=Fix , FRy=Fiy , FRz=Fiz , Mx=miy , My=miy ,
合力矩投影定律
cos
'
FR
合力投影定律
cos F Rx FR
x 0
F ix F iy F iz
空间任意力系
FC
最大载重Pmax是多少。
Q FB
P
D
解: 取起重机为研究对象
A
B,C
My(F)0, FAaco3s0Qa3co3s0Pclos0
MC'x(F)0,
a FA2
FBaQa2P(a2lsin)0
y C
x’
Fz 0, FAFBFCPQ0
A
ED
x
解得: FA=19.3kN, FB=57.3kN, FC=43.4kN
d O1
O
MO MO cos MO MO sin
d MO MO sin
FR
FR
一般情形下空间任意力系可合成为力螺旋
(4) 空间任意力系平衡的情形
● F′R=0,MO=0
2019/11/15
原力系平衡
内容回顾
空间力系的简化与合成
主矢
主矩
最后结果
说
明
FR′ = 0
MO = 0 MO≠0
§5-5 空间任意力系的平衡条件及其应用
1、平衡条件及平衡方程:
平衡条件:
由平衡力系定理可知,空间一般力系平衡的充要条件:力 系的主矢和对任一点的主矩都等于零,即:
平衡方程:
FR Fi 0
M O M O i 0
由主矢与主矩的计算式,有
F R (F x F x i )0 2 i, (F F yy ) i2 i0 ,(F F zz i )i2 0
② 空间任意力系的平衡条件及其应用;
2019/11/15
§5-4 空间任意力系的简化
1. 空间力线平移定理
作用于刚体的力 F 可等效地平移到刚体上的任一点O, 但须附加一力偶,此附加力偶矩 矢M 等于原力对平移点O 的力矩矢MO(F)。
【材料课件】04空间力系(1)

rr M o (F ) y zFx xFz
M o F z xFy yFx
(4–5)
2.力对轴的矩
r
r
Mz (F) Mo(Fxy ) Fxy h (4–6)
力与轴相交或与轴平行(力与轴在同一平面内),力对该轴 的矩为零.
3、 力对点的矩与力对过该点的轴的矩的关系
已知:力Fr ,力 标 x, y, z
结果: F1 3000N, F2 6000N,
FAx 10004N, FAz 9397N,
FBx 3348N, FBz 1799N,
例4-10
已知: F、P及各尺寸 求: 杆内力
解:研究对象,长方板
受力图如图 列平衡方程
r
M AB F 0
r
M AE F 0
r
M AC F 0
例4-3
已知:P=1000N ,各杆重不计. 求:三根杆所受力.
解:各杆均为二力杆,取球铰O,画受 力图建坐标系如图。
由 Fx 0 FOB sin 45 FOC sin 45 0
Fy 0 FOB cos 45 FOC cos 45 FOA cos 45 0
Fz 0
FOA sin 45 P 0
圆盘面O1垂直于z轴, 圆盘面O2垂直于x轴, 两盘面上作用有力偶, F1=3N,F2=5N,构件自重不计.
求:轴承A,B处的约束力.
解:取整体,受力图如图b所示.
由力偶系平衡方程
Mx 0
Mz 0
解得
F2 400 FAz 800 0
F1 400 FAx 800 0
FAx FBx 1.5N FAz FBz 2.5N
r F
在三根轴上的分力
Frx,Fry,Frz
,力
M o F z xFy yFx
(4–5)
2.力对轴的矩
r
r
Mz (F) Mo(Fxy ) Fxy h (4–6)
力与轴相交或与轴平行(力与轴在同一平面内),力对该轴 的矩为零.
3、 力对点的矩与力对过该点的轴的矩的关系
已知:力Fr ,力 标 x, y, z
结果: F1 3000N, F2 6000N,
FAx 10004N, FAz 9397N,
FBx 3348N, FBz 1799N,
例4-10
已知: F、P及各尺寸 求: 杆内力
解:研究对象,长方板
受力图如图 列平衡方程
r
M AB F 0
r
M AE F 0
r
M AC F 0
例4-3
已知:P=1000N ,各杆重不计. 求:三根杆所受力.
解:各杆均为二力杆,取球铰O,画受 力图建坐标系如图。
由 Fx 0 FOB sin 45 FOC sin 45 0
Fy 0 FOB cos 45 FOC cos 45 FOA cos 45 0
Fz 0
FOA sin 45 P 0
圆盘面O1垂直于z轴, 圆盘面O2垂直于x轴, 两盘面上作用有力偶, F1=3N,F2=5N,构件自重不计.
求:轴承A,B处的约束力.
解:取整体,受力图如图b所示.
由力偶系平衡方程
Mx 0
Mz 0
解得
F2 400 FAz 800 0
F1 400 FAx 800 0
FAx FBx 1.5N FAz FBz 2.5N
r F
在三根轴上的分力
Frx,Fry,Frz
,力
5 理论力学--空间任意力系
z FAz Mz
FAy My
y
x
Mx A FAx
图5-8
因此,按照空间任意力系简化理论,将固定端处 的约束力向固定端点A处简化,得到一个力和一个力 偶。 这个力的大小和方向不能确定,所以用三个正交 的分力来表示;这个力偶的大小和方向也不能确定, 也用三个正交的分量表示。
5.3 空间任意力系的平衡方程
A
Fy 0
列平衡方程
F F4 cos 0 F2 cos a F a 0
F3
y
x
O x MO
F2
y
主矢 的大小和方向余弦分别为
FR ( Fx ) 2 ( Fy ) 2 ( Fz ) 2
图5-5
, cos(FR , k )
cos( FR , i )
F
FR
x
, cos(FR , j )
F
FR
y
F
FR
z
空间力偶系可合成为一个力偶
5.3.1 空间任意力系的平衡方程 空间任意力系平衡的必要与充分条件为:力系的 主矢和对任意一点的主矩均等于零。
M O M O (F ) 0 FR F 0
空间任意力系的平衡方程
F 0 F 0 其中包含有三个投影方程和三个 F 0 力矩方程,共计6个独立方程,可 M (F ) 0 解6个未知量。 M (F ) 0 M (F ) 0
O
M (F ) ,k M
z O
结 论
空间任意力系向任一点简化后,一般得到一个 力和一个力偶 。 这个力作用于简化中心,其力矢等于原力系的主矢。 这个力偶的力偶矩矢等于原力系对简化中心的主矩。 空间任意力系的主矢与简化中心的位置无关,而 主矩一般随简化中心位置的改变而改变,与简化中心 的位置有关。
FAy My
y
x
Mx A FAx
图5-8
因此,按照空间任意力系简化理论,将固定端处 的约束力向固定端点A处简化,得到一个力和一个力 偶。 这个力的大小和方向不能确定,所以用三个正交 的分力来表示;这个力偶的大小和方向也不能确定, 也用三个正交的分量表示。
5.3 空间任意力系的平衡方程
A
Fy 0
列平衡方程
F F4 cos 0 F2 cos a F a 0
F3
y
x
O x MO
F2
y
主矢 的大小和方向余弦分别为
FR ( Fx ) 2 ( Fy ) 2 ( Fz ) 2
图5-5
, cos(FR , k )
cos( FR , i )
F
FR
x
, cos(FR , j )
F
FR
y
F
FR
z
空间力偶系可合成为一个力偶
5.3.1 空间任意力系的平衡方程 空间任意力系平衡的必要与充分条件为:力系的 主矢和对任意一点的主矩均等于零。
M O M O (F ) 0 FR F 0
空间任意力系的平衡方程
F 0 F 0 其中包含有三个投影方程和三个 F 0 力矩方程,共计6个独立方程,可 M (F ) 0 解6个未知量。 M (F ) 0 M (F ) 0
O
M (F ) ,k M
z O
结 论
空间任意力系向任一点简化后,一般得到一个 力和一个力偶 。 这个力作用于简化中心,其力矢等于原力系的主矢。 这个力偶的力偶矩矢等于原力系对简化中心的主矩。 空间任意力系的主矢与简化中心的位置无关,而 主矩一般随简化中心位置的改变而改变,与简化中心 的位置有关。
5第四篇空间任意力系

表示集度大小分布情况及分布力作用方向的图形称为荷载图。 q
A
B
简化结果为合力。 合力作用线位置:
xc x A A,yc y A A
结论:合力通过荷载图的形心。
例题
F12 ql三角形面积
F ql
第三节 一般平行分布力的简化
简化结果为一个合力。 合力作用线位置:
xxV, yyV c V c V
平行分布的面力的合力的大小等于荷载图的体积,合力 通过荷载图体积的形心。
一个力系的主矢量是一常量,与简化中心位置无关,而 主矩一般与简化中心有关。
第一节 空间任意力系的简化
主矢和主矩的解析计算
F R F i F i
( F i) x i ( F i) y j ( F i) z k
F R x F i, x F R y F i, y F R z F iz
F F2 F2 F2
由 Y 0 ;Y A P y 0 , Y A P y 35 (N ) 2 m y 0 ; P z 5 0 10 Q 0 x 0 , Q 74 (N )6
mzA0;30Px05P 0y20X0 B5Q 0co2s000, XB43(N 7) X0;XAXBPxQco2s000, XA72(N 9) mxA0;20ZB 030Pz05Q 0si2n000, ZB20(4N)0 Z0;ZAZBPzQsi2n000, ZA38(N 5)
c
Wc
Wc
W
x x i V i,y y i V i ,z z i V i
c
Vc
Vc
V
对于曲面或曲线,只须在上述公式中分别将ΔVi改为ΔAi (面积)或ΔLi (长度),V改A为或L,即可得相应的重心坐标 公式。
——形心、对称性
A
B
简化结果为合力。 合力作用线位置:
xc x A A,yc y A A
结论:合力通过荷载图的形心。
例题
F12 ql三角形面积
F ql
第三节 一般平行分布力的简化
简化结果为一个合力。 合力作用线位置:
xxV, yyV c V c V
平行分布的面力的合力的大小等于荷载图的体积,合力 通过荷载图体积的形心。
一个力系的主矢量是一常量,与简化中心位置无关,而 主矩一般与简化中心有关。
第一节 空间任意力系的简化
主矢和主矩的解析计算
F R F i F i
( F i) x i ( F i) y j ( F i) z k
F R x F i, x F R y F i, y F R z F iz
F F2 F2 F2
由 Y 0 ;Y A P y 0 , Y A P y 35 (N ) 2 m y 0 ; P z 5 0 10 Q 0 x 0 , Q 74 (N )6
mzA0;30Px05P 0y20X0 B5Q 0co2s000, XB43(N 7) X0;XAXBPxQco2s000, XA72(N 9) mxA0;20ZB 030Pz05Q 0si2n000, ZB20(4N)0 Z0;ZAZBPzQsi2n000, ZA38(N 5)
c
Wc
Wc
W
x x i V i,y y i V i ,z z i V i
c
Vc
Vc
V
对于曲面或曲线,只须在上述公式中分别将ΔVi改为ΔAi (面积)或ΔLi (长度),V改A为或L,即可得相应的重心坐标 公式。
——形心、对称性
第四章 空间任意力系x

(4-4)
第一节 空间任意力系的简化
得到:
FRx Fix , FRy Fiy , FRz Fiz
(4-5)
而F的大小及方向余弦为:
2 2 2 FR FRx FRy FRz FRy FRx cos( FR , x) , cos( FR , y ) (4-6) FR FR FRz cos( FR , z ) FR
FR = F1 + F2 + + Fn = Fi
(4-1)
附加力偶系可合成为一个力偶,力偶矩MO等于各附 加力偶矩的矢量和,即MO=M1+M2+……+Mn,亦即等于 原力系中各力对于简化中心的矩的矢量和
M0 M01 M02 M0n M0i
(4-2)
矢量 FR = Fi称为原力系的主矢量,矢量 M 0 称为原力系对于简化中心O的主矩。
第一节 空间任意力系的简化
3、空间任意力系简化为一合力螺旋
若FR≠0,MO≠0,且MO 与FR 不相垂直,如图 (4-3a) ,则可用下述方法进一步简化。
图4-3
力 螺 旋
第一节 空间任意力系的简化
将MO 分解为垂直于FR 的M1 和平行于FR 的MR。
因M1 所代表的力偶与力 FR 位于同一平面V(⊥ M1)
即:
FR=0,MO=0
(4-15)
第二节 空间任意力系的平衡条件 平衡方程
过O点取直角坐标系Oxyz,上述条件可用代数方 程表示为:
F 0, F 0, F 0 M 0, M 0, M 0
ix iy iz ix iy iz
(4-16)
第二节 空间任意力系的平衡条件 平衡方程
第一节 空间任意力系的简化
得到:
FRx Fix , FRy Fiy , FRz Fiz
(4-5)
而F的大小及方向余弦为:
2 2 2 FR FRx FRy FRz FRy FRx cos( FR , x) , cos( FR , y ) (4-6) FR FR FRz cos( FR , z ) FR
FR = F1 + F2 + + Fn = Fi
(4-1)
附加力偶系可合成为一个力偶,力偶矩MO等于各附 加力偶矩的矢量和,即MO=M1+M2+……+Mn,亦即等于 原力系中各力对于简化中心的矩的矢量和
M0 M01 M02 M0n M0i
(4-2)
矢量 FR = Fi称为原力系的主矢量,矢量 M 0 称为原力系对于简化中心O的主矩。
第一节 空间任意力系的简化
3、空间任意力系简化为一合力螺旋
若FR≠0,MO≠0,且MO 与FR 不相垂直,如图 (4-3a) ,则可用下述方法进一步简化。
图4-3
力 螺 旋
第一节 空间任意力系的简化
将MO 分解为垂直于FR 的M1 和平行于FR 的MR。
因M1 所代表的力偶与力 FR 位于同一平面V(⊥ M1)
即:
FR=0,MO=0
(4-15)
第二节 空间任意力系的平衡条件 平衡方程
过O点取直角坐标系Oxyz,上述条件可用代数方 程表示为:
F 0, F 0, F 0 M 0, M 0, M 0
ix iy iz ix iy iz
(4-16)
第二节 空间任意力系的平衡条件 平衡方程
第四章 任意力系1
F2 Fn
F1 M1
=
简化中心
M2 F2 Mn A
Fn
=
附加力偶
FR MA
r r F R = Σ Fi
FRx = ∑ Fix FRy = ∑ Fiy
FRX FRY cos α = , sin α = FR FR
主矩:MA=∑Mi= ∑MA(F i) 主矩: ∑
与简化中心A无关 无关, 与简化中心A有关 1、FR与简化中心 无关,MA与简化中心 有关 2、合力=主矢+主矩 合力=主矢+ 简化结果讨论: 简化结果讨论:
xC = r α ∫α
2 −
积分法
y dθ θ θ
x = 2 rcos θ 3
r
dS
1
α
2 1 2 2 rcos θ ( r )dθ = rsinα , 3 2 3α
x
如:α=π/2, 则:xc=(4r/3π) ,
例4-3:图示槽钢横截面,求:此截面重心的位置。 图示槽钢横截面, 此截面重心的位置。 =0, 解:取对称轴故yc=0,再分割成有规律的几个物体 xc=∑Ai xi/A ∑ A1=30•10=300cm2, x1=15cm; ; A2=20•10=200cm2, x2=5cm; ; A3=30•10=300cm2, x3=15cm; ;
'
r r 1、主矢 F =0 而主矩 M ≠0 合力偶 、 O R
简化结果讨论: 简化结果讨论:
与简化中心无关
r 2、 F ≠ 0 、 R
r MO = 0
合力
r r 3、 FR ≠ 0 ; M O ≠ 0 、 r r (1) F MO R
合力
F R
o
MO
力学第四章空间力系

例4-3 如图所示的折杆,已知在其自由端A处受到 力F的作用。试求折杆固定端O的约束力。
§4-3 空间任意力系的平衡方程
解 取折杆为研究对象,画受力图如图所示,选直角坐 标系0xyz,列平衡方程
Fx = 0
FOx = 0
Fy = 0
FOy = 0
Fz = 0
FOz F = 0
Mx F = 0 MOx Fb = 0
§4-3 空间任意力系的平衡方程
平衡基本方程
空间任意力系平衡的充分必要条件:
各力在各坐标轴上的投影代数和分别等于零; 各力对各坐标轴的矩的代数和分别等于零
即:
Fx = 0
Fy = 0
Fz = 0
MxF = 0 M y F = 0 Mz F = 0
§4-3 空间任意力系的平衡方程
§4-3 空间任意力系的平衡方程
例4-5 用空间平衡力系的平面解法重解例4-4 解 重物匀速上升,鼓轮作匀速转动,即处于平衡姿态。取鼓轮为研究 对象。将力G和Q平移到轴线上,分别作垂直平面、水平平面和侧垂直
平面(图a、b、c)的受力图。
a)
c) b)
§4-3 空间任意力系的平衡方程
由(图a、b、 c),列平衡方程。
§4-2 力对轴之矩
力对轴之矩(N·m):度量力使物体绕轴的转动效应
M z (F ) = M O (Fxy ) = Fxyd
结论:力对某轴之矩是力使物体绕该轴 转动效应的度量,其大小等于力对垂直 于某轴平面内力对O点(即某轴在该面 的投影点)之矩。
力对轴之矩的符规定:
§4-2 力对轴之矩
例4-1 图示力F作用在圆轮的平面内,设力F作用线距z轴 距离为d。试计算力F对z轴之矩。
符号规定:从投影的起点到终点的方向与相应坐标轴 正向一致的就取正号;反之,就取负号。
§4-3 空间任意力系的平衡方程
解 取折杆为研究对象,画受力图如图所示,选直角坐 标系0xyz,列平衡方程
Fx = 0
FOx = 0
Fy = 0
FOy = 0
Fz = 0
FOz F = 0
Mx F = 0 MOx Fb = 0
§4-3 空间任意力系的平衡方程
平衡基本方程
空间任意力系平衡的充分必要条件:
各力在各坐标轴上的投影代数和分别等于零; 各力对各坐标轴的矩的代数和分别等于零
即:
Fx = 0
Fy = 0
Fz = 0
MxF = 0 M y F = 0 Mz F = 0
§4-3 空间任意力系的平衡方程
§4-3 空间任意力系的平衡方程
例4-5 用空间平衡力系的平面解法重解例4-4 解 重物匀速上升,鼓轮作匀速转动,即处于平衡姿态。取鼓轮为研究 对象。将力G和Q平移到轴线上,分别作垂直平面、水平平面和侧垂直
平面(图a、b、c)的受力图。
a)
c) b)
§4-3 空间任意力系的平衡方程
由(图a、b、 c),列平衡方程。
§4-2 力对轴之矩
力对轴之矩(N·m):度量力使物体绕轴的转动效应
M z (F ) = M O (Fxy ) = Fxyd
结论:力对某轴之矩是力使物体绕该轴 转动效应的度量,其大小等于力对垂直 于某轴平面内力对O点(即某轴在该面 的投影点)之矩。
力对轴之矩的符规定:
§4-2 力对轴之矩
例4-1 图示力F作用在圆轮的平面内,设力F作用线距z轴 距离为d。试计算力F对z轴之矩。
符号规定:从投影的起点到终点的方向与相应坐标轴 正向一致的就取正号;反之,就取负号。
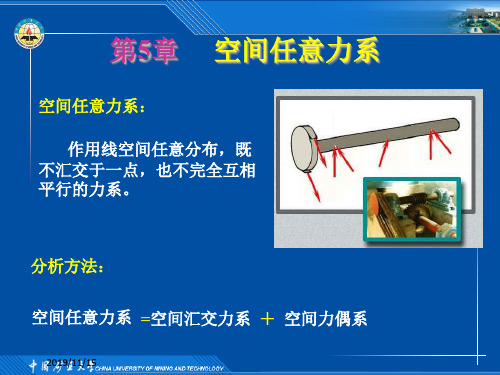
空间任意力系

2
所以空间任意力系的平衡方程为:
F F F
x y
0, M x F 0 0, M z F 0
0, M y F 0
8
z
空间平行力系的平衡方程,设各力线都 // z 轴。 因为
F 0 M (F ) 0 M (F ) 0
z x y
M F
z
MO
MO
7
§4-2
空间任意力系的条件
一、空间任意力系的平衡充要条件是:
FR
F 0
i
2 2 x y
MO
z
M
2
2
Oi
0
根据:
FR
MO
F F F
M
x (F )
M
2
y (F )
M
z (F )
O x x O y y O z z
大小:
MO
M
x
(F )
M
2
y
(F )
M2zຫໍສະໝຸດ (F )2
6
方向:
M Ox cosM O , i MO cosM O , j M Oy MO
M F
x
M F
y
MO
M Oz cosM O , k MO
空间任意力系的简化
把研究平面任意力系的简化方法拿来研究空间任意力系的
简化问题,但须把平面坐标系扩充为空间坐标系。
设作用在刚体上有
空间一般力系
F1 , F2 , F3 Fn
向O点简化 (O点任选)
4
根据力线平移定理:空间任意力系=>空间汇交力系+空间
第四章空间任意力系,第五章第一节材料力学的任务,第五章第二节变形固体的基本假设,第五章第三节内力和截

得
切应力互等定理:
dy O
x
z
在微体的互垂截面上,垂直 于截面交线的切应力数值相等, 而方向则均指向或离开该交线。
请思考: 在求解材料力学的问题中,理论力学里力 的可传性原理什么时候可以应用,什么时候不能 应用?图中力P的作用点从C处移到E处,对支反 力有影响吗?对哪一段杆的内力和变形有影响?
(a)
Fiy 0 Fiz 0
z Py
Pz
Mx Fi 0 M y Fi 0
YA ZA C
Mz Fi 0
x
A
y
T2
T1
YB ZB
D B
Fiy 0 Fiz 0 Mx Fi 0 M y Fi 0 Mz Fi 0
YA 38.1N YB 28.6N
实际方向与图设方向相反
作业:4-3
材料力学
研究对象:变形体
§5.1 材料力学的任务
材料力学从宏观的角度,研究构件(主要 是杆件)在外力(及温度变化)作用下的变形、 受力和失效的规律,为构件的合理设计提供必 要的理论基础和计算方法。
变形体及其受力状态
刚化原理:变形体在某一力系作用下处于 平衡,如将此变形体刚化为刚体,其平衡 状态保持不变。
刚体及其平衡规律
§5.2 变形固体的基本假设
力学性能:材料在外力作用下所表现的性能。
1、连续性假设 continuous assumption
2、均匀性假设 homogeneous assumption
3、各向同性假设 isotropic assumption
作业:4-3 , 1-2
切应力互等定理:
dy O
x
z
在微体的互垂截面上,垂直 于截面交线的切应力数值相等, 而方向则均指向或离开该交线。
请思考: 在求解材料力学的问题中,理论力学里力 的可传性原理什么时候可以应用,什么时候不能 应用?图中力P的作用点从C处移到E处,对支反 力有影响吗?对哪一段杆的内力和变形有影响?
(a)
Fiy 0 Fiz 0
z Py
Pz
Mx Fi 0 M y Fi 0
YA ZA C
Mz Fi 0
x
A
y
T2
T1
YB ZB
D B
Fiy 0 Fiz 0 Mx Fi 0 M y Fi 0 Mz Fi 0
YA 38.1N YB 28.6N
实际方向与图设方向相反
作业:4-3
材料力学
研究对象:变形体
§5.1 材料力学的任务
材料力学从宏观的角度,研究构件(主要 是杆件)在外力(及温度变化)作用下的变形、 受力和失效的规律,为构件的合理设计提供必 要的理论基础和计算方法。
变形体及其受力状态
刚化原理:变形体在某一力系作用下处于 平衡,如将此变形体刚化为刚体,其平衡 状态保持不变。
刚体及其平衡规律
§5.2 变形固体的基本假设
力学性能:材料在外力作用下所表现的性能。
1、连续性假设 continuous assumption
2、均匀性假设 homogeneous assumption
3、各向同性假设 isotropic assumption
作业:4-3 , 1-2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
14
200 100
Mz 0
z
50
200
FAz A FAy C FAx
x 20o Q
FBz B
FBx
300Px 50Py 200FBx 50Q cos200 0
100
D Py y
Px Pz
FBx 437(N)
Fx 0
FAx FBx Px Q cos 200 0
FAx 729(N)
z
50
200
200
r=50mm,Px=466N,
A C
B
Py=352N, Pz=1400N。
求:平衡时力Q 和
x
轴承A , B的约束反 20o Q
z
力?
50
200
(Q力作用在C轮的最 低点)
解:选轴为研究对象, C
200
FAz
FBz
A FAy
B
作受力图。
FAx
FBx
x 20o Q
100
D Py y
Px Pz
1
工程中常常存在着很多各力的作用线在空间内任意分布的 力系,即空间力系,空间力系是最一般的力系。
(a)图为空间汇交力系;(b)图为空间一般力系; (b)图中去了风力为空间平行力系。
迎面 风力
侧面 风力
b
2
第四章 空间一般力系 §4–1 空间一般力系的简化 §4–2 空间一般力系的平衡 §4–3 物体的重心
15
200 100
z
50
200
100
FAz
A FAy C
Mx 0
FAx x 20o Q
200FBz 300Pz 50Q sin200 0
FBz
B
D
Py y
FBx
Px Pz
FBz 2040(N)
Fz 0
FAz FBz Pz Q sin200 0
FAz 385(N)
16
[例1] 已知: RC=100mm, RD=50mm,Px=466N, Py=352N, Pz=1400N 求:平衡时力 Q 和轴承A , B的约束反力?
L
y dl
yC
V
L
33
三、重心的求法:
1. 简单几何形体的重心── 积分法
[例1] 求半径为R,顶角为2 的均质圆弧的重心。
解:由于对称关系,该圆弧重心必在Ox轴,即yC=0。
取微段:dL R d x Rcos
O x
P86表4-1
x dL
xC
L
L
R2
cos
d
2R
R s in
xC
➢ 这个力偶的力偶矩矢称为力系对简化中心的主矩, 并等于力系中各力对简化中心之矩矢的矢量和,并 与简化中心的选择有关。
5
FR Fi MO M Oi
解析式:
FR' FR'xi FR'y j FR'zk
FR'x Fxi
FR'y Fyi
FR'z Fzi
M O MOxi MOy j MOzk
V
V
ydV
yC
V
V
zdV
zC
V
V
xC
Vi xi V
, yC
Vi yi V
, zC
Vi zi V
32
形心坐标公式
x dV
y dV
z dV
xC
V
V
,
yC
V
V
,
zC
V
V
等厚薄板(平面图形):
x dA
xC
V
A
y dA
yC V A
细杆(线):
x dl
xC
V
xC
Vi xi V
, yC
Vi yi V
, zC
Vi zi V
均质等厚平板 : xC
Ai xi A
, yC
Ai yi A
均质等截面细杆: xC
li xi l
31
物体分割的越多,每一小部分体积越小,求得的形心位置就
越准确。在极限情况下(n ,常用积分法求物体的形心位置。
xdV
xC
PzC Pi zi
zC
Pi zi P
综合上述得重心坐标公式为:
xC
Pi xi P
,
yC
Pi yi P
, zC
Pi zi P
29
质心坐标公式:
若以△Pi= △mi g , P=Mg 代入上式可得质心公式:
xC
mi
M
xi
,
yC
mi
M
yi
,zC
mi
M
zi
30
形心(几何中心)坐标公式:
对均质体:
MOx M xi MOy M yi MOz Mzi
6
空间一般力系简化结果的讨论:
1、 FR 0, MO 0 力系是一零力系,该力系平衡。 2、 FR 0, MO 0 力系可合成一个合力偶。
合力偶的力偶矩矢等于原力系对于简化中心的主 矩。此时主矩与简化中心的位置无关。
3、 FR 0, MO 0 力系可合成为一个合力。 合力的大小和方向等于原力系的主矢,合力作
解:
Fx 0, FDx 0
Mz
0,
M3
FAy
a
0, FAy
M3 a
M1
Fy
0,
FAy
FDy
0, FDy
FAy
M3 a
My
0,
M2
FAz
a
0, FAz
M2 a
Fz
0, FAz
FDz
0, FDz
FAz
M2 a
FAz FAy
M2
M3 FDz FDy FDx
Mx1 0, M1 bFDz c FDy 0
主视图:yz平面
z
50
200
FAz A FAy C FAx
x 20o Q
FBz B
FBx
100
D Py y
Px Pz
Fy 0
FAy Py 0 FAy Py 352(N)
MA 0
200FBz 300Pz 50Q sin200 0
z
FBz 2040(N)
Qz
FAz
FAy CA
FBz
Pz
平行或相交。
③ 一般从整体 局部的研究方法。
④ 摩擦力F = FN fs ,方向与运动趋势方向相反。
20
3、注意问题:
① 三个取矩轴和三个投影轴可以不重合、可以是任选的 六个轴。
② 空间力系独立方程六个,取矩方程不能少于三个。 ③ 力偶在投影轴中不出现(即在投影方程中不出现) ④ 空间力系中也包括摩擦问题。
用线通过简化中心O点。(此时与简化中心有关, 换个简化中心,主矩不为零。)
7
4、 FR 0, MO 0
① FR MO
FR
FR
FR
FR
d O'
d O'
O
O
O
MO
FR
FR FR FR
MO
FR
d
d
MO FR
合力: FR Fi
8
4、 FR 0, MO 0
② FR / / MO
力螺旋(又移动又转动)
Fxi 0, M xi 0 Fyi 0, M yi 0 Fzi 0, M zi 0
各种力系的自由度
空间一般力系平衡的充要条件是:
各力在三个坐标轴上的投影的代数和及各力对三个轴 力矩的代数和都必须分别等于零。
共六个独立方程,只能求解独立的六个未知数。 投影轴和取矩轴可以任意选择,但六个方程必须线性无关。 空间一般力系的平衡方程的其它形式:四矩式,五矩式,六
21
[例2] 曲杆ABCD, ∠ABC=∠BCD=900, AB=a, BC=b, CD=c, M2,
M3 。
求:支座反力及M1=? 此题训练:
①力偶不出现在投影式中
M1 M2
②力偶在力矩方程中出现是把
M3
力偶当成矢量后,类似力在投
影式中投影。
③力争一个方程求一个支反力。 ④了解空间支座反力。
22
FR
MO
O
FR
MO
O
③ FR与 MO成任意角度 把主矩分解为①、② 分别处理。
FR
MO
j
O
FR
MO // j
MO
O
MO
FR
d O' O
MO //
力螺旋
d MO FR
9
§4–2 空间一般力系的平衡
一、空间一般力系的平衡条件
FR
0
MO 0
空间一般力系平衡的充分与必要条件 是主矢量和对任一点的主矩都等于零。
100
D Py y
Px
Pz
13
100
100
200 100
z
50
200
FAz A FAy C FAx
x 20o Q
FBz B
FBx
Fy 0
FAy Py 0
FAy Py 352(N)
100
D Py y
Px Pz
My 0
Pz 50 100 Q cos 20o 0 Q 746(N)
矩式。 11
三、空间平行力系(平行于 z 轴的平行力系):
因为: M zi 0
F3
Fxi 0 成为恒等式
Fyi 0
z
ห้องสมุดไป่ตู้
Fn
F1 y O
x 故空间平行于 z 轴的平行力系的平衡方程为: F2
200 100
Mz 0
z
50
200
FAz A FAy C FAx
x 20o Q
FBz B
FBx
300Px 50Py 200FBx 50Q cos200 0
100
D Py y
Px Pz
FBx 437(N)
Fx 0
FAx FBx Px Q cos 200 0
FAx 729(N)
z
50
200
200
r=50mm,Px=466N,
A C
B
Py=352N, Pz=1400N。
求:平衡时力Q 和
x
轴承A , B的约束反 20o Q
z
力?
50
200
(Q力作用在C轮的最 低点)
解:选轴为研究对象, C
200
FAz
FBz
A FAy
B
作受力图。
FAx
FBx
x 20o Q
100
D Py y
Px Pz
1
工程中常常存在着很多各力的作用线在空间内任意分布的 力系,即空间力系,空间力系是最一般的力系。
(a)图为空间汇交力系;(b)图为空间一般力系; (b)图中去了风力为空间平行力系。
迎面 风力
侧面 风力
b
2
第四章 空间一般力系 §4–1 空间一般力系的简化 §4–2 空间一般力系的平衡 §4–3 物体的重心
15
200 100
z
50
200
100
FAz
A FAy C
Mx 0
FAx x 20o Q
200FBz 300Pz 50Q sin200 0
FBz
B
D
Py y
FBx
Px Pz
FBz 2040(N)
Fz 0
FAz FBz Pz Q sin200 0
FAz 385(N)
16
[例1] 已知: RC=100mm, RD=50mm,Px=466N, Py=352N, Pz=1400N 求:平衡时力 Q 和轴承A , B的约束反力?
L
y dl
yC
V
L
33
三、重心的求法:
1. 简单几何形体的重心── 积分法
[例1] 求半径为R,顶角为2 的均质圆弧的重心。
解:由于对称关系,该圆弧重心必在Ox轴,即yC=0。
取微段:dL R d x Rcos
O x
P86表4-1
x dL
xC
L
L
R2
cos
d
2R
R s in
xC
➢ 这个力偶的力偶矩矢称为力系对简化中心的主矩, 并等于力系中各力对简化中心之矩矢的矢量和,并 与简化中心的选择有关。
5
FR Fi MO M Oi
解析式:
FR' FR'xi FR'y j FR'zk
FR'x Fxi
FR'y Fyi
FR'z Fzi
M O MOxi MOy j MOzk
V
V
ydV
yC
V
V
zdV
zC
V
V
xC
Vi xi V
, yC
Vi yi V
, zC
Vi zi V
32
形心坐标公式
x dV
y dV
z dV
xC
V
V
,
yC
V
V
,
zC
V
V
等厚薄板(平面图形):
x dA
xC
V
A
y dA
yC V A
细杆(线):
x dl
xC
V
xC
Vi xi V
, yC
Vi yi V
, zC
Vi zi V
均质等厚平板 : xC
Ai xi A
, yC
Ai yi A
均质等截面细杆: xC
li xi l
31
物体分割的越多,每一小部分体积越小,求得的形心位置就
越准确。在极限情况下(n ,常用积分法求物体的形心位置。
xdV
xC
PzC Pi zi
zC
Pi zi P
综合上述得重心坐标公式为:
xC
Pi xi P
,
yC
Pi yi P
, zC
Pi zi P
29
质心坐标公式:
若以△Pi= △mi g , P=Mg 代入上式可得质心公式:
xC
mi
M
xi
,
yC
mi
M
yi
,zC
mi
M
zi
30
形心(几何中心)坐标公式:
对均质体:
MOx M xi MOy M yi MOz Mzi
6
空间一般力系简化结果的讨论:
1、 FR 0, MO 0 力系是一零力系,该力系平衡。 2、 FR 0, MO 0 力系可合成一个合力偶。
合力偶的力偶矩矢等于原力系对于简化中心的主 矩。此时主矩与简化中心的位置无关。
3、 FR 0, MO 0 力系可合成为一个合力。 合力的大小和方向等于原力系的主矢,合力作
解:
Fx 0, FDx 0
Mz
0,
M3
FAy
a
0, FAy
M3 a
M1
Fy
0,
FAy
FDy
0, FDy
FAy
M3 a
My
0,
M2
FAz
a
0, FAz
M2 a
Fz
0, FAz
FDz
0, FDz
FAz
M2 a
FAz FAy
M2
M3 FDz FDy FDx
Mx1 0, M1 bFDz c FDy 0
主视图:yz平面
z
50
200
FAz A FAy C FAx
x 20o Q
FBz B
FBx
100
D Py y
Px Pz
Fy 0
FAy Py 0 FAy Py 352(N)
MA 0
200FBz 300Pz 50Q sin200 0
z
FBz 2040(N)
Qz
FAz
FAy CA
FBz
Pz
平行或相交。
③ 一般从整体 局部的研究方法。
④ 摩擦力F = FN fs ,方向与运动趋势方向相反。
20
3、注意问题:
① 三个取矩轴和三个投影轴可以不重合、可以是任选的 六个轴。
② 空间力系独立方程六个,取矩方程不能少于三个。 ③ 力偶在投影轴中不出现(即在投影方程中不出现) ④ 空间力系中也包括摩擦问题。
用线通过简化中心O点。(此时与简化中心有关, 换个简化中心,主矩不为零。)
7
4、 FR 0, MO 0
① FR MO
FR
FR
FR
FR
d O'
d O'
O
O
O
MO
FR
FR FR FR
MO
FR
d
d
MO FR
合力: FR Fi
8
4、 FR 0, MO 0
② FR / / MO
力螺旋(又移动又转动)
Fxi 0, M xi 0 Fyi 0, M yi 0 Fzi 0, M zi 0
各种力系的自由度
空间一般力系平衡的充要条件是:
各力在三个坐标轴上的投影的代数和及各力对三个轴 力矩的代数和都必须分别等于零。
共六个独立方程,只能求解独立的六个未知数。 投影轴和取矩轴可以任意选择,但六个方程必须线性无关。 空间一般力系的平衡方程的其它形式:四矩式,五矩式,六
21
[例2] 曲杆ABCD, ∠ABC=∠BCD=900, AB=a, BC=b, CD=c, M2,
M3 。
求:支座反力及M1=? 此题训练:
①力偶不出现在投影式中
M1 M2
②力偶在力矩方程中出现是把
M3
力偶当成矢量后,类似力在投
影式中投影。
③力争一个方程求一个支反力。 ④了解空间支座反力。
22
FR
MO
O
FR
MO
O
③ FR与 MO成任意角度 把主矩分解为①、② 分别处理。
FR
MO
j
O
FR
MO // j
MO
O
MO
FR
d O' O
MO //
力螺旋
d MO FR
9
§4–2 空间一般力系的平衡
一、空间一般力系的平衡条件
FR
0
MO 0
空间一般力系平衡的充分与必要条件 是主矢量和对任一点的主矩都等于零。
100
D Py y
Px
Pz
13
100
100
200 100
z
50
200
FAz A FAy C FAx
x 20o Q
FBz B
FBx
Fy 0
FAy Py 0
FAy Py 352(N)
100
D Py y
Px Pz
My 0
Pz 50 100 Q cos 20o 0 Q 746(N)
矩式。 11
三、空间平行力系(平行于 z 轴的平行力系):
因为: M zi 0
F3
Fxi 0 成为恒等式
Fyi 0
z
ห้องสมุดไป่ตู้
Fn
F1 y O
x 故空间平行于 z 轴的平行力系的平衡方程为: F2