ASDA-A2异警一览表
A2培训文稿
ASDA-A2辅助设计软件
PR Mode的简单应用
·P1-01:01 (控制模式) ·PR#02设定
ASDA-A2辅助设计软件
PR Mode的简单应用
· PR#03设定
ASDA-A2辅助设计软件
手动建表
ASDA-A2辅助设计软件
手动建表
·选择建表方法
ASDA-A2辅助设计软件
脉波命令
上位机
ASDA-A2 产品特色
高速通讯网络
·高速通讯网络CANopen协定,通讯速率达1Mbps ·相容DS301,DS402规范 ·支持DMCNET,高达20Mbps
ASDA-A2 产品特色
优越的响应性能
·快速定位与高响应优异性能
·整定时间低于1ms
·速度响应频宽为1000Hz ·空载从-3000rpm~3000rpm加速时间为7ms
送料軸 枕料
机械实体凸轮与电子凸轮
·机械实体凸轮:一种角度感应和控制装置,通过在 金属盘片上加工出一定形状的轮廓曲线,使其在某个 位置可以有效的使与之接近的微动开关产生动作一导 通或截止
·电子凸轮(E-CAM):利用软件的方式,来规划主 动轴(Master)与从动轴(Slave)的位置关系,如 同两者之间有一个虚拟的凸轮存在
支持电子凸轮功能
1. 首创内建电子凸轮功能,轮廓点数可达720点,两点间自动平滑插补 2. 利用CAPTURE(高速脉冲抓取)的功能,采用教导式的方法,可直接 在A2伺服规划凸轮曲线 ,并烧录于A2驱动器中。
ASDA-A2 产品特色
内建电子凸轮(E-CAM)功能,枕式包装机上的应用!
送膜轴 包裝膜 切刀轴
·4通道高速示波器,取样频率可达8KHz
台达DVP-ES2C系列与ASDA-A2伺服电机调试方法

台达绝对型编码器伺服系统的参数设置(DVP32ES200RC/TC与ASDA-A2 伺服驱动器)使用之前需要对CANopen型号的PLC进行韧体的更新。
(对应的版本为V3.43)刻录方式:1.PC 要与 ES2-C PLC 通过 IFD6601 链接。
2.点开有.exe 的文件,选择正确的 COM口。
3.鼠标点击 START burn 开始刻录,待PLC上面的EPROM指示灯闪烁红色以后,重新启动PLC,4.重启后,再次鼠标点击 START burn 开始刻录可以看到白色进度条在移动(红色进度条也是一样的,白色代表版本升级,红色代表版本降级),同时看到 Progress 有显示百分数值,到达百分之百为刻录完成。
5.刻录后检查版本刻录情况一,硬件 DI 信号配置 :DI1 → PL : 正向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱动(P2-10),用常闭接近开关,设置为23.器显示异警。
DI2 → NL : 逆向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱(P2-11),用常闭接近开关,设置为22.动器显示异警。
DI3 → EMGS : 为 B 接点,必须时常导通(ON),否则驱动器显示异警。
(P2-12),用常闭接近开关,设置为21.DI4 → ORGP : 在内部位置缓存器模式下,在搜寻原点时,此讯号接通后伺服将此点之位置当成原点。
(可以不接)二,手动设定参数 :在使用伺服专用指令之前,需要先将伺服做一些初始化设定,步骤如下 :1.将伺服 P2-08 设置为 10,回归原厂设定。
2.将伺服断电后重新上电。
3.设定伺服控制模式,将 P1-01 设置为 0001(PR 模式)具体方向可以根据实际情况更改。
4.P3-01通讯速度设置为 0403(1M)。
5.站号设定 : 依照需要的台数,分别设置每台伺服的 P3-00,请依序设定为 1、2、3 …最多可设定 8 台。
6.将伺服断电后重新上电。
台达CANopen通讯伺服速度S控制

16.16 通过CANopen 总线控制ASDA-A2伺服驱动器(DS402)¢ 控制要求当 X0=ON 时,变频器停止并进入准备运转状态;当 X1=ON 时,变频器运转,运转速度为900转/分钟,运转方向为顺时针旋转。
¢ 连接示意图¢ 台达ASDA-A2 伺服驱动器通讯参数设置¢ ADSA-A2 伺服驱动器在本例中配置的参数说明参数 设置值 说明P1-01 b 设置伺服工作模式为CANopen模式。
P03-002设置ASDA-A2伺服CANopen 站号P03-01 0400ASDA-A2伺服CANopen 通讯速率设置为1Mbps 。
P03-01的第三位用于设置伺服的CANopen 通讯速率,其值与通讯速率对应关系如下所示:0:125Kbps 1: 250Kbps 2: 250Kbps 3: 500Kbps 4: 1M Kbps参数索引 参数子索引 参数说明 6083 0 伺服驱动器才从0rpm 加速到3000rpm 需要的时间,单位ms 。
6084 0 伺服驱动器才从3000rpm 减速到0rpm 需要的时间,单位ms 。
6081 0 伺服驱动器速度,单位为单元/每秒。
607A 0伺服驱动器目标位置,单位为单元。
¢模块设置按照下表分别对DVPCOPM-SL扫描模块进行设置模块名称节点地址通讯速率DVPCOPM-SL 扫描模块011M bpsASDA-A2伺服驱动器021M bps¢使用 CANopen 网络配置工具配置网络1. 打开 CANopenBuilder 软件,软件界面如下图所示。
2. 选择『设置(S)』菜单,点击『通讯设置』,选择『串口设置』指令。
3. 在此对计算机与 SV 主机的通讯参数进行设置。
如”通讯端口”、”通讯地址”、”通讯速率”、”通讯格式”。
项目说明默认值当计算机连接的设备为DVPCOPM-SL时,接注:CANopenBuilder 组态软件中的通讯速度,数据位,校验位,停止位以及模式的选择须与 SV PLC 主机设置一致。
Delta_ASDA-A2_M_SC_20130603操作手册-第三章 配线

伺服电机
Revision Jun, 2013
3-1
第三章 配线ASDA-A2 系列
NOTE
安装注意事项: 1) 检查 R、S、T 与 L1c、L2c 的电源和接线是否正确。 2) 确认伺服电机输出 U、V、W 端子相序接线是否正确,接错电机可能 不转或乱转。 D 端开路、 外部回生电阻应接于 P 、 3) 使用外部回生电阻时, 需将 P 、 C 端,若使用内部回生电阻时,则需将 P 、D 端短路且 P 、C 端开 路。 4) 异警或紧急停止时, 利用 ALARM 或是 WARN 输出将电磁接触器 (MC) 断电,以切断伺服驱动器电源。
3-2
Revision Jun, 2013
第三章 配线ASDA-A2 系列
3.1.2 驱动器的连接器与端子
端子记号
L1c、L2c R、S、T U、V、W FG
名称
控制回路电源输入端 主回路电源输入端 电机连接线 格)
说明
连接单相交流电源。 (根据产品型号,选择适当的电压规 连接三相交流电源。 (根据产品型号,选择适当的电压规 格) 连接至电机 端子记号 U V W FG 线色 红 白 黑 绿 连接至驱动器的接地处 P 、D 端短路,P 、C 端开路 电阻接于 P 、C 两端,且 P 、D 端开路 使用外部刹车单元 将刹车单元的 P 、P 分别连接于 伺服的 P 、P 两端,且 P 、D -8
Revision Jun, 2013
第三章 配线ASDA-A2 系列
3.1.5 编码器引出线的连接头规格
编码器连接示意图一:
伺服驱动器
*2
快速接头
*1
CN2 连接头
编码器引出线 的连接头
编码器引出线
电机
ASD-A2样本
J : 400V / 3000 r/min K : 400V / 2000 r/min L : 400V / 1500 r/min M : 400V / 1000 r/min
編碼器形式
1 : 增量型 ,20-bit 2 : 增量型 ,17-bit 3:2500 ppr
A : 絕對型, 單圈解析度 : 17-bit 多圈解析度 : 16-bit
4000
3000
2000
1000
0
-1000
-2000
-3000
-4000
-5000
070 10
20
30
40
50
60
70
Time(ms)
Speed
Speed
Delay 1
Time
Time
Speed
Time
上位機送出
軸1
位置脈波命令
軸2
位置脈波參考命令
伺服系統對應參照表
220V 系列
馬達
Motor 系列
型號 ASD-A2-0743ASD-A2-0743ASD-A2-0743ASD-A2-1043ASD-A2-1543ASD-A2-2043ASD-A2-3043ASD-A2-0743ASD-A2-1043ASD-A2-1543ASD-A2-2043ASD-A2-2043ASD-A2-0743ASD-A2-1043ASD-A2-1543ASD-A2-3043ASD-A2-4543ASD-A2-5543ASD-A2-7543ASD-A2-1543-
0.90 1.55 2.60
瞬時最大輸出電流 (A) 2.70 4.65 7.80
5.10
15.30
7.30
13.40 19.40 2.60 7.30 8.30
ASDA-Soft 软体辅助说明

功能表
可用通道数 3CH
2CH
2CH 2CH
file://C:\Documents and Settings\Administrator\Local Settings\Temp\~hh1BA1.htm 2014-10-28
ASDA
连续型示波器
ASAD-A2 示波器
l提供FFT功能。
l适用于ASDA-A2机种,提供三种速率 1. 高速监视8k:提供0.125ms高解 析度的示波器。 2. 高速监视16k:提供0.0625mk:提供1ms解析度的 示波器。 若取消勾选择表示低速监视
ASDA
Page 2 of 65
改变显示语言:
回到目录
功能概述
本软体目前提供三种语言选择(英文/简体中文/繁体中文)可供使用者操作使用。
强烈建议使用者:在一开始执行本软体时,就选定语言,不要操作中途变更语言设定,以免因变更语言而会重新载入,而会刷新使用者 的输入值。
适用机种
A Series、 B Series、A2 Series、B2 Series
5. 开启/储存参数档资料: 当使用者抓取完资料后,可将所抓取的资料储存起来以便日后查看。 开启示波器资料:目前只能开启*.scp的示波器资料档,其他格式档案则无法储存。 储存示波器资料:软提供多种储存档案格式,如下: *.scp:示波器档,此档案格式可再日后由本软体开启,使用者如要日后再开启查看,强烈建议必须存成此档案格式,否则其他格式 无法由本软体开启。 *.xls:为 EXCEL 档案格式,方便使用者他用。 *.txt:为文字档格式,方便使用者他用。 *.bmp:为一般的图档,方便使用者运用。
1. 按下On-Line。 2. 从下拉式选单中,选择所要连接的机种。
异警排除

正向极限异 正向极限开关被按下时动作
IGBT 温度异常 IGBT 温度过高时动作
内存异常
内存(EE-PROM)存取异常时动作
芯片通讯异常 芯片通讯异常时动作
串行通讯异常 RS-232/485 通讯异常时动作
串行通讯逾时 RS-232/485 通讯逾时时动作
命令写入异常 控制命令下达异常时动作
主回路电源缺相 主回路电源缺仅单相输入
电源系统)
格定义相符
驱动器硬件故障
当电压计测定主回路输入电压在 送回经销商或原厂检修
额定容许电压值以内仍然发生此
错误
:低电压
异警原因
异警检查
异警处置
主回路输入电压低于额 检查主回路输入电压接线是否正 重新确认电压接线
定容许电压值
常
主回路无输入电压源 用电压计测定是否主回路电压正 重新确认电源开关 常
第十章 异警排除
10.1 异警一览表
异警表示
异警名称
异警动作内容
过电流
主回路电流值超越马达瞬间最大电流值 1.5 倍时动作
过电压
主回路电压值高于规格值时动作
低电压
主回路电压值低于规格电压时动作
马达磁场位置异常 Z 脉冲所对应磁场角度异常
回生异常
回生控制作动异常时动作
过负载
马达及驱动器过负载时动作
过速度
电源输入错误(非正确 用电压计测定电源系统是否与规 使用正确电压源或串接变压器
电源系统)
格定义相符
Revision March, 2008, Doc. Name: 2007PDD23000009
10-3
第十章 异警排除
:马达磁场位置异常
异警原因 位置检出器损坏 位置检出器松脱
AELTA ASD-A2系列 高机能通讯型伺服器简易说明书

第三章
3.1
配线
周边装置与主电源回路连接 ............................................................................. 3-1
3.1.1 周边装置接线图 ...................................................................................... 3-1 3.1.2 驱动器的连接器与端子 ........................................................................... 3-3 3.1.3 电源接线法 ............................................................................................ 3-5
Revision April, 2010
目录|ASDA-A2 系列
3.1.4 电机 U、V、W 引出线的连接头规格 ...................................................... 3-7 3.1.5 编码器引出线的连接头规格 .................................................................... 3-8 3.1.6 线材的选择.............................................................................................. 3-9 3.2 伺服系统基本方块图 ........................................................................................ 3-11 3.2.1 400W(含)以下机种(无内建回生电阻) ............................................ 3-11 3.2.2 750W ~ 4.5kW 机种(内建回生电阻和风扇) ........................................ 3-12 3.2.3 5.5kW 机种(内建风扇,无回生电阻) .................................................. 3-13 3.3 CN1 I/O 信号接线 ............................................................................................ 3-14 3.3.1 CN1 I/O 连接器端子 Layout.................................................................... 3-14 3.3.2 CN1 I/O 连接器信号说明 ........................................................................ 3-16 3.3.3 界面接线图(CN1) ............................................................................... 3-27 3.3.4 使用者指定 DI 与 DO 信号 ...................................................................... 3-36 3.4 3.5 CN2 编码器信号接线 ....................................................................................... 3-37 CN3 通讯口信号接线 ....................................................................................... 3-39 3.5.1 CN3 通讯口端子 Layout.......................................................................... 3-39 3.5.2 CN3 通讯口与个人电脑的连接方式 ........................................................ 3-40 3.6 3.7 3.8 3.9 3.10 CN4 串列通讯口(USB) ................................................................................ 3-41 CN5 位置反馈信号接头(全闭回路) .............................................................. 3-42 CN6 通讯连接口(CANopen) ....................................................................... 3-43 CN7 扩展 DI ..................................................................................................... 3-45 标准接线方式 ................................................................................................... 3-46 3.10.1 位置(Pt)模式标准接线 ...................................................................... 3-46 3.10.2 位置(Pr)模式标准接线 ...................................................................... 3-47
DELTA ASDA-A2系列 高性能通讯型伺服驱动器 应用技术手册

如果您在使用上仍有问题,请咨询经销商或者本公司客服中心。
Revision May, 2011
i
序言ASDA-A2 系列
安全注意事项
ASDA-A2 系列为一高解析开放型(Open type)的伺服驱动器,操作时须安装于屏蔽式的控 制箱内。 本驱动器利用精密的反馈控制及结合高速运算能力的数字信号处理器 (Digital Signal PRocessor, DSP),来控制 IGBT 产生精确的电流输出,用来驱动三相永磁式同步交流伺服 电机(PMSM)以达到精准的定位。 ASDA-A2 系列可使用于工业应用场合上,且建议安装于使用手册中的配线(电)箱环境(驱 动器、线材及电机都必须安装于符合 UL 环境等级 1 的安装环境最低要求规格)。 在接收检验、安装、配线、操作、维护及检查时,应随时注意以下安全注意事项。 标志「危险」、「警告」及「禁止」代表的涵义:
主电路配线
请不要将动力线和信号线从同一管道内穿过,也不要将其绑扎在一起。配线时, 请使动力线和信号线相隔 30 厘米(11.8 英寸)以上。 对于信号线、编码器(PG)反馈线,请使用多股绞合线以及多芯绞合整体屏蔽 线。对于配线长度,信号输入线最长为 3 米(9.84 英尺) ,PG 反馈线最长为 20 米(65.62 英尺) 。 即使关闭电源,伺服驱动器内部仍然可能会滞留高电压,请暂时(10 分钟)不 要触摸电源端子。并请确认「CHARGE」指示灯熄灭以后,再进行检查作业。 请不要频繁地开关电源。如果需要连续开关电源时,请控制在一分钟一次以下。
第三章
3.1
配线
周边装置与主电源回路连接............................................................................ 3-1
台达伺服电机常见问题
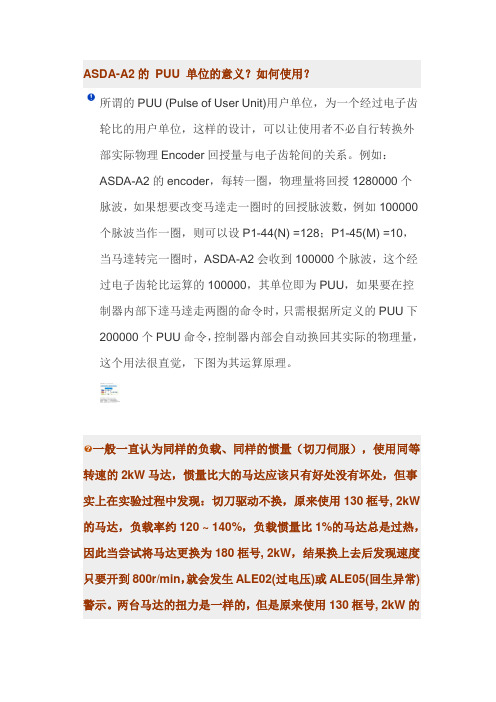
所谓的PUU (Pulse of User Unit)用户单位,为一个经过电子齿轮比的用户单位,这样的设计,可以让使用者不必自行转换外部实际物理Encoder回授量与电子齿轮间的关系。
例如:ASDA-A2的encoder,每转一圏,物理量将回授1280000个脉波,如果想要改变马逹走一圏时的回授脉波数,例如100000个脉波当作一圏,则可以设P1-44(N) =128;P1-45(M) =10,当马逹转完一圏时,ASDA-A2会收到100000个脉波,这个经过电子齿轮比运算的100000,其单位即为PUU,如果要在控制器内部下逹马逹走两圏的命令时,只需根据所定义的PUU下200000个PUU命令,控制器内部会自动换回其实际的物理量,这个用法很直觉,下图为其运算原理。
一般一直认为同样的负载、同样的惯量(切刀伺服),使用同等1. 并不是高惯量就一定好,低惯量就一定差,要看其应用场合。
T= I x α (扭力= 惯量x 角加速度)P= T x ω (功率= 扭力x 角速度)P = I x α x ω所以,同样的功率之下,若惯量提升,加速度必下降,即加减速的特性变差了,当然,角速度也会相对变化,在此我们先假设其运转速度不变。
I是固定的,当一个系统设定好后(如飞刀系统,因为飞刀不变,但如果用于输送带,惯量则会变,当输送带上的物品变多时,拖的力量需加大)。
所以,你可以利用T= I x α 来估其加减速的大小及所需的扭力α = (目标转速- 初始速度) / (初始速度到目标速度所需时间)若一个系统需1 N-m的扭力,则高惯量与低惯量的马逹皆可逹成时,如果要其反应快一点,转快一点,则低惯量会是比较理想的选择。
用以上的公式,也可以轻而易举的解释,因为低惯量马逹,其转子惯量比较低,转子比较轻,所以要停下来,回生的能量比较少,以同样的速度撞墙,胖子撞的力量会比瘦的大。
总而言之,如果要反应快,加减速特性好,如果扭力值够的话,选用低惯量的马逹会比较理想,如果要求是要大扭力的,如举重物,则可能要选用高惯量的马达。
台达伺服驱动器ASDA-A2参数设置

序号参数名称
设定值说明
备注1
P2-17121出厂设置上电后出现急停报警AL013,更改后
报警解除
出厂设置212
P2-16123出厂设置上电后出现正向运转禁止极限报警
AL015,更改后报警解除
出厂设置233
P2-15122出厂设置上电后出现逆向运转禁止极限报警
AL014,更改后报警解除
出厂设置224
P2-10001不用接线的情况下打开伺服使能功能
出厂设置1015
P1-441280000电子齿轮分子,电机转动一圈输出脉冲
1280000个脉冲
出厂设置16
P1-451000电子齿轮分母
出厂设置17
P1-020010打开扭矩限制功能
出厂设置00008
P2-12016
出厂设置116
9
P2-13117出厂设置11710
P1-12
30
扭矩限制30%
出厂设置100
碧茂科技(苏州)有限公司 谢晓
台达ASDA-A2伺服驱动器设置参数(PT模式)
驱动器型号:ASDA-A2-0221-M
电机型号:ECMA-CA0602RS 扭矩限制功能命令的来源 00: 模拟电位器 01:P1-12 10:P1-13 11:P1-14。
安川驱动动器报警代码
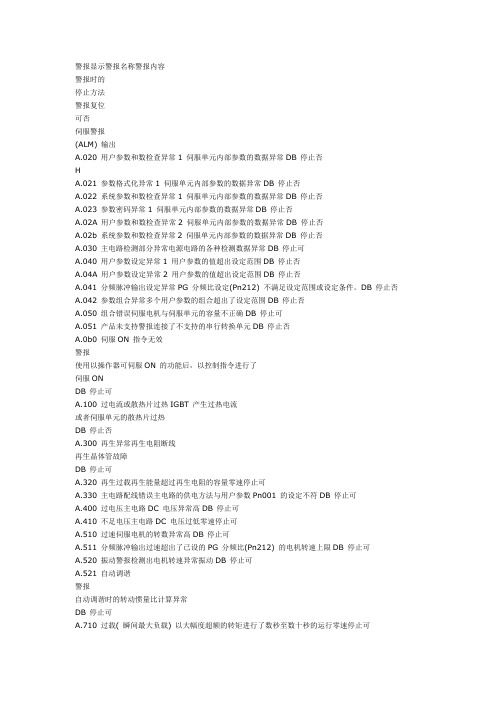
警报显示警报名称警报内容警报时的停止方法警报复位可否伺服警报(ALM) 输出A.020 用户参数和数检查异常1 伺服单元内部参数的数据异常DB 停止否HA.021 参数格式化异常1 伺服单元内部参数的数据异常DB 停止否A.022 系统参数和数检查异常1 伺服单元内部参数的数据异常DB 停止否A.023 参数密码异常1 伺服单元内部参数的数据异常DB 停止否A.02A 用户参数和数检查异常2 伺服单元内部参数的数据异常DB 停止否A.02b 系统参数和数检查异常2 伺服单元内部参数的数据异常DB 停止否A.030 主电路检测部分异常电源电路的各种检测数据异常DB 停止可A.040 用户参数设定异常1 用户参数的值超出设定范围DB 停止否A.04A 用户参数设定异常2 用户参数的值超出设定范围DB 停止否A.041 分频脉冲输出设定异常PG 分频比设定(Pn212) 不满足设定范围或设定条件。
DB 停止否A.042 参数组合异常多个用户参数的组合超出了设定范围DB 停止否A.050 组合错误伺服电机与伺服单元的容量不正确DB 停止可A.051 产品未支持警报连接了不支持的串行转换单元DB 停止否A.0b0 伺服ON 指令无效警报使用以操作器可伺服ON 的功能后,以控制指令进行了伺服ONDB 停止可A.100 过电流或散热片过热IGBT 产生过热电流或者伺服单元的散热片过热DB 停止否A.300 再生异常再生电阻断线再生晶体管故障DB 停止可A.320 再生过载再生能量超过再生电阻的容量零速停止可A.330 主电路配线错误主电路的供电方法与用户参数Pn001 的设定不符DB 停止可A.400 过电压主电路DC 电压异常高DB 停止可A.410 不足电压主电路DC 电压过低零速停止可A.510 过速伺服电机的转数异常高DB 停止可A.511 分频脉冲输出过速超出了已设的PG 分频比(Pn212) 的电机转速上限DB 停止可A.520 振动警报检测出电机转速异常振动DB 停止可A.521 自动调谐警报自动调谐时的转动惯量比计算异常DB 停止可A.710 过载( 瞬间最大负载) 以大幅度超额的转矩进行了数秒至数十秒的运行零速停止可A.720 过载( 连续最大负载) 以超额定值的转矩进行了连续运行DB 停止可A.730A.731DB 过载由于DB( 动态制动器) 动作,旋转能量超过了DB 电阻的容量DB 停止可A.740 冲击电阻过载主电路电源频繁地重复ON/OFF DB 停止可A.7A0 散热片过热伺服单元的散热片过热零速停止可表10.1 警报显示与输出一览( 续)警报显示警报名称警报内容警报时的停止方法警报复位可否伺服警报(ALM) 输出A.810 编码器备份警报编码器的电源完全耗尽,位置数据被清除DB 停止否HA.820 编码器和数校验警报编码器存储器的和数校验结果异常DB 停止否A.830 编码器电池警报绝对值编码器备用电池电压下降DB 停止可A.840 编码器数据警报编码器的内部数据异常DB 停止否A.850 编码器过速电源ON 时,编码器高速旋转DB 停止否A.860 编码器过热编码器的内部温度过高DB 停止否A.870 全封闭序列器编码器和数检查警报编码器存储器的和数检查结果出错DB 停止否A.880 全封闭序列器编码器数据警报编码器的内部数据异常DB 停止否A.8A0 全封闭序列器编码器标度异常线性编码器出现故障DB 停止可A.8A1 全封闭序列器编码器模块异常线性编码器或线性变换单元发生故障DB 停止可A.8A2 全封闭序列器编码器传感器异常( 增量型)线性编码器出现故障DB 停止可A.8A3 全封闭序列器编码器位置异常( 绝对值)编码器的前馈位置上发生异常DB 停止可A.b31 电流检测异常1 U 相电流检测器异常DB 停止否A.b32 电流检测异常2 V 相电流检测器异常DB 停止否A.b33 电流检测异常3 电流检测器异常DB 停止否A.b6A MECHATROLINK通信ASIC异常1 MECHATROLINK 通信ASIC 异常DB 停止否A.b6b MECHATROLINK通信ASIC异常2 MECHATROLINK 通信ASIC 中发生了致命的错误DB 停止否A.bF0 系统警报0 发生了伺服单元内部程序异常0 DB 停止否A.bF1 系统警报1 发生了伺服单元内部程序异常1 DB 停止否A.bF2 系统警报2 发生了伺服单元内部程序异常2 DB 停止否A.bF3 系统警报3 发生了伺服单元内部程序异常3 DB 停止否A.bF4 系统警报4 发生了伺服单元内部程序异常4 DB 停止否A.C10 防止失控检测伺服电机发生失控DB 停止可A.C80 编码器清除异常旋转圈数上限值设定异常绝对值编码器的多旋转量的清除或者设定不正确DB 停止否A.C90 编码器通信异常无法进行编码器与伺服单元间的通信DB 停止否A.C91 编码器通信位置数据加速度异常编码器的位置数据的计算中发生了异常DB 停止否A.C92 编码器通信定时器异常编码器和伺服单元间的通信用定时器发生了异常DB 停止否A.CA0 编码器参数异常编码器的参数被破坏DB 停止否A.Cb0 编码器回送校验异常与编码器的通信内容错误DB 停止否0 旋转圈数上限值不一致编码器与伺服单元的旋转圈数上限值不一致DB 停止否A.CF1 全封闭串行变换单元通信异常( 接收失败)全封闭串行变换单元的通信异常DB 停止否A.CF2 全封闭串行变换单元通信异常( 定时器停止)全封闭串行变换单元的通信异常DB 停止否表10.1 警报显示与输出一览( 续)警报显示警报名称警报内容警报时的停止方法警报复位可否伺服警报(ALM) 输出A.d00 位置偏差过大位置偏差超过了用户参数(Pn520) 的设定值DB 停止可HA.d01 伺服ON 时位置偏差过大报警伺服ON 时,积存的位置偏差超过了用户参数(Pn526) DB 停止可A.d02 伺服ON 时速度限制所引起的位置偏差过大警报在位置偏差脉冲积存状态下伺服ON,则通过PN529 执行速度限制。
台达ASDA—A2系列伺服助力构建刀库/刀塔系统

馈 单元 和 台达 等 多个 品 牌马 达 ;可 配合 多 品牌 NC系 统 ,只 需 I o 点控 制 ;支 持刀 位 记 忆等 。定 制 版 采用 ASDA— A2系列 伺 N. S - A 动 器 开发 Mo t i o n i n s i d e的 形式 ,大 幅 提升 功能 :可 区 分输 出刀 号与 报警 功能 ;能 够 自成 系统 ,简 化 NC 的控 制工 作 可 对
国轴 承进出口联 营公司发起 。并作 为西门子与
新政权就任 1 0 0天以后才能 看到其 产生 的影响”。 另一方面其国 内订单额完成 3 7 7亿 5 0 0 0万 日元 ,减少 4 . 6 % 。虽然受企业 设备投资 补助金待发放等 因素影响 ,汽车 、半导体相关行业需求仍稳步 发展。
刀片的对 称设计,能实 现左手及右 手方 向
的车削,并能在低的进给率下进行切槽加工。由
于新刀片的前端切削刃结构,加工槽底并非完全 平整。 因此,与现有的N P 型 刀片相 比.S C I R / L 2 2 - A D o 8 ・ 2 4 K 8 刀片在切槽加工中效率略低。 S C l R / L 2 2 一 A D 0 8 — 2 4 K 8 刀片主要推荐用于车 削及1 J \ 尺寸切槽加工,不推荐更多地用于其他切
中国机械 设备工 程股份有限 公司、 以及中国电
力工程有限公司等。
台达伺服调试
台达伺服调试何谓伺服的低频摆振?当发生低频摆振时如何处理?若系统刚性不足,在定位命令结束后,即使马达本身已经接近静止,机械传动端仍会出现持续摆动。
低频抑振功能可以用来减缓机械传动端摆动的现象。
低频抑振的范围为~ 。
本功能提供手动设定与自动设定,但目前只有ASDA-A2系列机种支持此功能。
低频抑振方式分为自动及手动方式:(1) 自动设定若用户难以直接知道频率的发生点,可以开启自动低频抑振功能。
此功能会自动寻找低频摆动的频率。
若P1-29设定为1时,系统会先自动关闭低频抑振滤波功能,并开始自动寻找低频的摆动频率。
当自动侦测到的频率维持固定后,P1-29会自动设回0,并会将第一摆动频率设定在P1-25且P1-26设为1。
第二摆动频率设定在P1-27且将P1-28设为1。
当P1-29自动设回零后,低频摆动依然存在,请检查低频抑振P1-26或P1-28是否已被自动开启。
若P1-26与P1-28皆为零,代表没有侦测到任何频率,此时请减少低频摆动检测准位P1-30,并设定P1-29 = 1,重新寻找低频的摆动频率。
(2) 手动设定低频抑振有两组低频抑振滤波器,第一组为参数P1-25 ~ P1-26,第二组为参数P1-27 ~ P1-28。
可以利用这两组滤波器来减缓两个不同频率的低频摆动。
参数P1-25与P1-27用来设定低频摆动所发生的频率,低频抑振功能唯有在低频抑振频率参数设定与真实的摆动频率接近时,才会抑制低频的机械传动端的摆动。
参数P1-26与P1-28用来设定经滤波处理后的响应,当P1-26与P1-28设定越大响应越好,但设太大容易使得马达行走不顺。
参数P1-26与P1-28出厂值默认值为零,代表两组滤波器的功能皆被关闭。
伺服煞车电阻使用时机为何?当伺服驱动器搭配马达运转时,若驱动器面板出现ALE05(回生能量异常)时,代表马达回生产生的能量超过驱动器内建回生电阻所能消耗的能量,此时必须安装回生电阻,提高驱动器回生能量消耗速度。
台达驱动器异警一览表

重新更正Pr命令与参数
AL219
写入参数:参数锁定
Pr程序写参数:伺服ON不可写入,或数值不合理;
重新更正Pr命令与参数
AL235
Pr命令溢位
位置命令计数器溢位,之后执行绝对定位命令
NMT:Reset node或0x6040.Fault Reset
AL245
紧急停止
紧急按钮按下时动作
AL014
反向极限异常
逆向极限开关被按下时动作
AL015
正向极限异常
正向极限开关被按下时动作
AL016
IGBT过热
IGBT温度过高时动作
AL017
参数记忆体异常
记忆体EE-PROM存取异常时动作
AL018
检出器输出异常
检出器输出高于额定输出频率
AL019
串列通讯异常
RS-232/485通讯异常时动作
同上
讯息中指定的Sub-Index不存在
同上
AL265
CAN物件存取时,资料Size错误
讯息中资料长度与指定的物件不符
同上
AL267
CAN物件存取时,资料范围错误
讯息中的资料超出指定物件的范围
同上
AL269
CAN物件是唯读,不可写入
讯息中指定物件不可写入
同上
AL266
CAN物件,不允许PDO
讯息中指定的物件不支援PDO
CANopen通讯讯异警一览表
AL185
CAN Bus硬体异常
CAN Bus 断线或Error Rx/Tx Counter超过128
NMT:Reset node或重新送电
AL111
台达ASDA-A2伺服驱动器在伺服刀架上的应用

台达ASDA-A2伺服驱动器在伺服刀架上的应用杨宇峰【摘要】将台达ASDA-A2绝对式伺服驱动器应用在伺服数控刀架上.通过使用内部Pr模式,设定刀架减速比、刀架工位数、刀架转速及加减速时间,调整刀架增益参数等,使伺服驱动器能很好地应用在刀架上.【期刊名称】《机械工程师》【年(卷),期】2018(000)011【总页数】3页(P142-143,146)【关键词】伺服刀架;增益;应答性【作者】杨宇峰【作者单位】沈阳机床股份有限公司,沈阳 110142【正文语种】中文【中图分类】TM383.40 引言伺服刀架是数控机床的重要组成部分,它可使数控机床在工件一次装夹中完成多种甚至所有的加工工序,以缩短加工的辅助时间,减少加工过程中由于多次安装工件而引起的误差,从而提高机床的加工效率和加工精度。
随着伺服数控刀架技术的成熟、性能的提高,以及伺服驱动系统价格的降低,越来越多的数控车床选择配置伺服数控刀架[1]。
此款伺服数控刀架采用绝对值伺服电动机驱动转位,上电无需回零,就近双向快速选刀,控制精确,定位迅速,提高转速,有效地提高生产效率,缩短生产时间[2]。
本文根据伺服数控刀架转位控制过程和控制系统的控制功能编辑梯形图,实现控制系统对刀架的有效控制,最后对控制系统进行了测试和控制参数的优化,提高了伺服数控刀架的运转性能。
1 电气接线图及参数调整说明该刀架采用台达A2系列伺服驱动器,搭配750 W绝对式伺服驱动器及绝对式电动机。
此款伺服具备电池供电功能,使编码器在伺服系统断电后,仍能保持正常工作,不会因断电后电动机轴心被转动而无法得知电动机真实位置。
伺服数控刀架通过伺服驱动器的分度功能实现转位,伺服驱动器提供了8组输入和5组输出[3],转位过程由驱动器的DI/DO信号控制,下面具体介绍伺服数控刀架转位的控制过程。
表1 DI/DO定义输入信号功能输出信号功能DI1(IDX0)工位选择输入点0 DO1 组合输出点1 DI2(IDX1)工位选择输入点1 DO2 组合输出点2 DI3(IDX2)工位选择输入点2 DO3 组合输出点3 DI4(IDX3)工位选择输入点3 DO4 组合输出点4 DI7(MD0)模式切换输入0 DO5 组合输出点5 DI8(MD1)模式切换输入1图1 伺服部分接线图DI/DO信号定义如表1所示。
表1 20 年特殊儿童入学残疾诊断汇总表
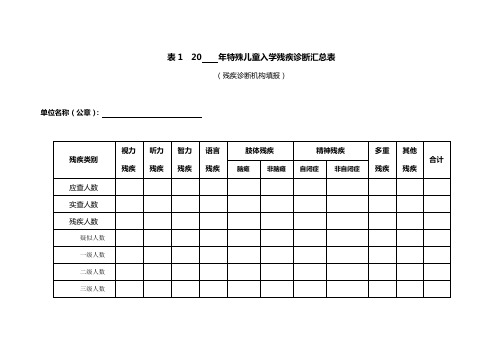
表1 20 年特殊儿童入学残疾诊断汇总表
(残疾诊断机构填报)
单位名称(公章):
填报人:填报日期:年月日
表2 20 年特殊儿童入学健康评估汇总表
(健康检查机构填报)
单位名称(公章):
2.3 特殊儿童入学体格检查情况(人数)
2.4 特殊儿童伴发疾病情况(人数)
2.5 特殊儿童营养问题情况(人数)
填报人:填报日期:年月日
表3 20 年特殊儿童入学评估报名及安置汇总表
(区县特教指导中心填报)
单位名称(公章):
3.2 特殊儿童入学安置情况
填报人:填报日期:年月日
表4 20 年特殊儿童入学健康评估汇总表
(上海市儿童保健所负责上报)
单位名称(公章):
4.2 特殊儿童入学健康检查情况(人数)
4.3 特殊儿童出生缺陷/先天畸形情况(人数)
4.4 特殊儿童入学体格检查情况(人数)
4.5 特殊儿童伴发疾病情况(人数)
4.6 特殊儿童营养问题情况(人数)
4.8 特殊儿童入学安置情况
填报人:填报日期:年月日。
台达伺服调试经验故障排除
Q1:伺服电机与普通电机有何区别?A1:伺服电机与普通电机最大的区别在于电机转子和反馈装置。
伺服电机转子表面贴有强力磁钢片,因此可以通过定子线圈产生的磁场精确控制转子的位置,并且加减速特性远高于普通电机。
反馈装置可以精确反馈电机转子位置到伺服驱动器,伺服电机常用的反馈装置有光学编码器、旋转变压器等。
Q2:伺服驱动器输入电源是否可接单相220V ?A2:台达伺服1.5KW(含)以下可接单相/三相220V电源,2.0KW(含)以上只能接三相220V电源。
三相电源整流出来的直流波形质量更好,质量不好的直流电源会消耗母线上电容的能量,电机急加减速时电容会对母线充放电来保持母线电压稳定,因此三相电源输入比单相电源输入伺服的特性会好一些,三相电源输入提供的电流也更大。
Q3:伺服驱动器输出到电机的UVW三相是否可以互换?A3:不可以,伺服驱动器到电机UVW的接法是唯一的。
普通异步电机输入电源UVW两相互换时电机会反转,事实上伺服电机UVW任意两相互换电机也会反转,但是伺服电机是有反馈装置的,这样就出现正反馈会导致电机飞车。
伺服驱动器会检测并防止飞车,因此在UVW接错线后我们看到的现象是电机以很快的速度转过一个角度然后报警过负载ALE06。
Q4:伺服电机为何要Servo on之后才可以动作?A4:伺服驱动器并不是在通电后就会输出电流到电机,因此电机是处于放松的状态(手可以转动电机轴)。
伺服驱动器接收到Servo on信号后会输出电流到电机,让电机处于一种电气保持的状态,此时才可以接收指令去动作,没有收到指令时是不会动作的即使有外力介入(手转不动电机轴),这样伺服电机才能实现精确定位。
Q5:伺服驱动器上电就报警ALE14如何处理?A5:ALE14是正向极限异常报警,因为出厂参数设置正反向极限和紧急停止这些保护性的DI点都是常闭接点,在没有信号时则会报警。
在上位控制器已经连接了这些保护信号或者不需要这些保护信号时可通过以下方法消除报警:参数P2-15设为122或0,或者直接短接DI 点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十章异警排除10.1 驱动器异警一览表
第十章异警排除 ASDA-A2系列
第十章异警排除 ASDA-A2系列
第十章异警排除 ASDA-A2系列
第十章异警排除 ASDA-A2系列10.2 CANopen通讯异警一览表
第十章异警排除 ASDA-A2系列
第十章异警排除 ASDA-A2系列10.3 运动控制异警一览表
第十章异警排除 ASDA-A2系列
第十章异警排除 ASDA-A2系列
注:若出现与以上驱动器异警一览表、CANopen通讯讯异警一览表和运动控制异警一览表内不同的异警信息时,请与当地经销商或技术人员联系。
第十章异警排除 ASDA-A2系列10.4 异警原因与处置
异警表示
AL001:过电流
AL002:过电压
AL003:低电压
AL004:电机匹配错误
AL005:回生错误
AL006:过负荷
AL007:过速度
AL008:异常脉冲控制命令
AL009:位置控制误差过大
AL011:位置检出器异常
AL012:校正异常
AL013:紧急停止
AL014:反向运转极限异常
AL015:正向运转极限异常
AL016:IGBT过热
AL017:内存异常
AL018:检出器输出异常
AL019:串行通讯异常
AL020:串行通讯逾时
AL022:主回路电源异常
AL023:预先过负载警告
AL024:
编码器初始磁场错误
AL026:编码器内部数据可靠度错误
AL027:编码器内部重置错误
AL028:编码器高电压错误或编码器内部错误
AL029:格雷码错误
AL030:电机碰撞错误
AL031:电机U, V, W 接线错误侦测
AL034
:编码器内部通讯异常
AL035:编码器温度超过保护上限
AL040:全闭环位置控制误差过大
AL041:光学尺断线
AL042:模拟速度电压输入过高
AL044:驱动器功能使用率警告
AL045:电子齿轮比设定错误
AL060:绝对位置遗失
AL061:编码器低电压错误
AL062:绝对型位置圈数溢位
AL067:编码器温度警告
AL068:绝对型数据I/O传输错误
AL069:电机型式错误
AL06A:未建立绝对型原点坐标
AL070:编码器处置未完成警告
AL072:编码器过速度
AL073:编码器内存错误
AL074:编码器single-turn错误
AL075:编码器绝对圈数错误
AL077:编码器内部错误
AL079:编码器参数设置
AL07A:编码器Z相位置遗失
AL07B:编码器内存忙碌
AL07C:转速超过200 rpm时下达清除绝对位置命令
AL07D:当出现AL07C后,如果没有解除AL07C重新上电,会停止电机动作
AL07E:编码器清除程序错误
AL083:电流侦测范围异常
AL085:回生异常
AL086:输入电压过高
AL095:回生电阻断线
AL099:DSP韧体升级
AL111:CANopen SDO接收溢位
AL112:CANopen PDO接收溢位
AL121:
CANopen PDO存取时,Index错误
:CANopen PDO存取时,Sub-Index错误
AL123:CANopen PDO存取时,数据Size错误
AL124:CANopen PDO存取时,数据范围错误
AL125:CANopen PDO对象是只读,不可写入
AL126:CANopen PDO对象,不允许PDO
AL127:CANopen PDO对象,Servo On时,不允许写入
AL128:CANopen PDO对象,由EEPROM读取时错误
AL129:CANopen PDO对象,写入EEPROM时错误
AL130
:CANopen PDO对象,EEPROM的地址超过限制
CRC计算错误
AL132:CANopen PDO对象,写入密码错误
AL170:CANopen Heartbeat或
NodeGuarding错误
NodeGuarding错误
AL186:Bus off
AL201:CANopen 数据初始错误
AL207:PR命令Type 8来源参数群组超出范围
:PR命令Type 8来源参数群组超出范围
AL213~ AL217:PR程序写入参数错误
AL231:PR命令Type 8来源监视项目超出范围
10-31
AL235:PR命令溢位
10-32
AL237:分度坐标未定义
AL245:PR定位超时
AL249:PR定位超时
AL283:软件正向极限
10-33
AL285:软件负向极限
AL289:位置计数器溢位
AL291:Servo OFF
异常
同步失效
10-34
AL302:CANopen同步信号太快
AL303:CANopen同步信号超时
AL304:CANopen IP命令失效
AL305:SYNC Period错误
AL35F:紧急停止(减速过程中)
10-35
AL380:位置偏移警报
AL3CF:紧急停止
AL3F1:通讯型绝对位置命令错误
10-36
AL400:分度坐标错误
AL401:Servo On 时收到NMT Reset命令
AL404:PR特殊滤波器设定过大
AL500:STO功能被启动
AL501:STO_A lost (信号遗失或错误)
AL502:STO_B lost (信号遗失或错误)
10-37
AL503:STO_error
AL555:系统故障
10-38
10.5发生异常后解决异警的方法
10-39
10-40
第十章异警排除 ASDA-A2系列
10-41
第十章异警排除 ASDA-A2系列
10-42。