第七章 神经控制系统
神经系统知识点

神经系统知识点神经系统是人体中最为复杂和神奇的系统之一,它就像一个高效而精密的指挥中心,掌控着我们身体的一举一动、感知和思维。
首先,让我们来了解一下神经系统的基本构成。
神经系统主要由中枢神经系统和周围神经系统两大部分组成。
中枢神经系统包括脑和脊髓,这是整个神经系统的核心控制区域。
脑又分为大脑、小脑和脑干。
大脑是我们思考、记忆、感知和情感的发源地,它具有极其复杂的结构和功能。
小脑则主要负责协调和平衡身体的运动。
脑干连接着大脑和脊髓,控制着许多基本的生命功能,如呼吸、心跳和消化等。
脊髓则像是一条信息高速公路,将身体各部位的感觉信息传递到大脑,并将大脑发出的指令传递到身体的各个角落。
周围神经系统包括脑神经和脊神经,它们像无数的触角一样,延伸到身体的各个器官和组织。
周围神经系统又分为躯体神经系统和自主神经系统。
躯体神经系统主要负责控制我们的有意识动作,比如举手、抬腿等。
自主神经系统则在我们不知不觉中调节着内脏器官的活动,比如心跳的快慢、肠胃的蠕动等。
自主神经系统还可以进一步分为交感神经系统和副交感神经系统。
交感神经系统就像身体的“加速器”,在面临紧张、危险等情况时,会让身体进入“战斗或逃跑”模式,心跳加快、血压升高、呼吸急促,为身体提供更多的能量和氧气。
而副交感神经系统则像“刹车器”,在身体放松时发挥作用,促进消化、降低心率和血压,让身体进入休息和恢复的状态。
神经系统的工作原理就像一个复杂的通信网络。
神经元是神经系统的基本单位,它们通过电信号和化学信号来传递信息。
当我们受到外界刺激时,比如触摸到一个热的物体,皮肤上的感觉神经元会将这个信息转化为电信号,并沿着神经纤维传递到脊髓,然后再传递到大脑。
大脑接收到这个信息后,会迅速做出反应,比如让我们把手缩回来。
在这个过程中,神经递质起到了关键的作用。
神经递质是神经元之间传递信息的化学物质,不同的神经递质有着不同的作用,比如多巴胺能让人感到快乐和满足,而乙酰胆碱则与肌肉的收缩和记忆有关。
神经调控系统及其调控机制的研究

神经调控系统及其调控机制的研究神经调控系统是由大脑和神经系统组成的一套复杂的系统。
它能够控制和协调人体各个部位的生理和心理活动,是人体内部调整的主要机制之一。
神经系统由神经元、神经纤维和神经组织等构成,不仅负责传递信息,还控制着多种生理过程如呼吸、循环、消化以及感觉等。
神经调控系统的调控机制是由大脑和神经元细胞传递信号所构成的。
每个神经元细胞都有一端是树突,另一个端是轴突,通过轴突的神经纤维将信号传递给其他细胞。
大脑能够通过某种方式来改变神经元之间的联系,形成与身体各个部分的联系。
这种联系主要通过神经元和神经元之间的连接、神经元与肌肉的连接以及神经元与腺体的连接实现。
神经调控系统对人体的调节是通过复杂的嵌套层次来实现的。
可以将嵌套层次分为以下四个方面:1. 意识层次:意识层次是指大脑皮层和意识的产生。
它控制着人类的思考、判断、决策和行为。
皮层结构可以根据其职能分为前颞、前额叶、中央、枕叶和颞叶。
每个脑区都控制着不同的行为和思考过程。
2. 自主神经层次:自主神经层次是指交感神经和副交感神经对心血管、呼吸和消化系统的调节。
这种自主调控机制不受人类自主控制,但往往会受到外部环境和情绪的影响。
3. 端板体系统:端板体系统是指肌肉和神经元之间的联系。
它由神经元末端、肌肉和神经肌接头组成。
它负责肌肉的收缩和释放,以及身体各个器官的运转。
4. 并行处理层次:并行处理层次是指对多种生理过程的处理和调节,如心率、血压、水分平衡、酸碱平衡等。
这种并行处理需要神经调控系统对于身体内部各种生理情况的快速反应。
神经调控系统与各种疾病的关系密不可分,如神经调控系统研究已经涉及到癌症、糖尿病、心血管疾病、自闭症等多种疾病。
研究神经调控系统不仅能为各种疾病的治疗提供新思路,也可为神经系统疾病的治疗和预防提供新方法。
在神经调控系统的研究方面,近年来,关注的主要集中在神经系统的微观解剖结构以及神经系统的功能研究上。
通过利用通量换显微术,科学家们可以观测到神经元细胞结构和神经元与神经元之间的连接情况。
神经系统的调节与控制

神经系统的老化:随着年龄的增长,神经系统的功能逐渐下降
添加标题
衰退的原因:神经元的减少、神经递质的减少、神经连接的减少等
添加标题
影响:记忆力下降、认知功能下降、运动功能下降等
添加标题
预防与治疗:保持健康的生活方式、适当的运动、合理的饮食等
添加标题
汇报人:XX
感谢您的观看
大脑皮层还具有情感和情绪的调节作用,通过调节和控制情感和情绪,大脑皮层能够更好地调节和控制身体的各种功能。
下丘脑是神经系统的重要部分,负责调节体温、饥饿、口渴等生理功能。
01
02
下丘脑通过释放激素来调节身体的各种生理功能,如甲状腺激素、肾上腺素等。
下丘脑还参与情绪调节,如愤怒、恐惧、快乐等。
03
04
神经递质:在突触之间传递信息的化学物质
神经回路:多个神经元通过突触连接形成的信息传递路径
添加标题
添加标题
添加标题
添加标题
添加标题
添加标题
添加标题
神经系统的信号传递
电信号:神经元之间的快速传递,通过动作电位实现
添加标题
化学信号:神经元之间的慢速传递,通过神经递质实现
添加标题
电信号与化学信号的转换:神经元之间的信号传递需要电信号和化学信号的相互转换
运动学习:大脑通过学习和记忆,不断提高运动技能和协调能力
中枢神经系统的调节与控制
大脑皮层是神经系统的最高级部分,负责处理和整合来自身体内外的各种信息。
大脑皮层通过神经冲动的传递,调节和控制身体的各种功能,如运动、感觉、语言、思维等。
大脑皮层还具有学习和记忆的功能,通过不断的学习和记忆,大脑皮层能够更好地调节和控制身体的各种功能。
添加标题
神经系统调控机制及功能分析技术

神经系统调控机制及功能分析技术神经系统是指人体内由神经细胞和神经纤维组成的系统,其主要功能是传递信息和调节机体各系统的生理活动。
神经系统通过神经元、突触和神经递质等物质相互作用,形成复杂的调控机制,使机体能够适应不同的环境和应对各种挑战。
近年来,随着神经生物学和神经成像技术的不断发展,神经系统调控机制和相关功能分析技术得到了大量研究和应用。
神经系统调控机制神经系统调控机制包括中枢神经系统和周围神经系统两个部分。
中枢神经系统包括大脑、脊髓和脑干等,其主要功能是接收、处理、存储和发送神经信号。
周围神经系统则由脊髓神经和脑神经组成,负责传递神经信号到身体各个器官和组织,控制运动、感觉、内分泌和免疫等生理功能。
神经系统调控机制的本质是神经元的兴奋和抑制。
神经元可通过轴突将兴奋信号传递给其他神经元或目标细胞,而神经递质则是调控神经元兴奋和抑制的重要物质。
常见的神经递质包括多巴胺、谷氨酸、GABA等,其作用机制极其复杂,最终形成了相互作用的神经回路,调控生理、行为和认知等多种方面。
神经系统功能分析技术神经系统功能分析技术是神经生物学和神经医学领域的重要研究内容,包括神经元和神经回路的电生理记录、脑电图、磁共振成像和功能性磁共振等多种技术手段。
这些技术可以实时准确地观察神经元的电信号和脑部器官的生物学结构和功能,为研究神经系统调控机制和神经系统疾病的发病机制提供了有力的工具。
电生理记录是一种直接记录神经元电信号的技术。
其原理是通过电极将神经元的电信号记录下来,可以测量神经元的膜电位变化和动作电位等,从而研究神经元之间的兴奋和抑制关系。
脑电图则是一种非侵入性的生物电技术,可以记录大脑皮层神经元的电流和电场活动,反映出脑电图的特征波形和频率,是研究神经系统功能和疾病的一项基础技术。
磁共振成像技术则是一种无创性的影像检查技术,可以利用磁共振的原理显示出大脑和脊髓等神经系统器官的解剖形态,如发育、血流、血氧合水平等,广泛应用于神经系统定位诊断、功能活动和解剖结构研究。
智能控制(研究生)习题集
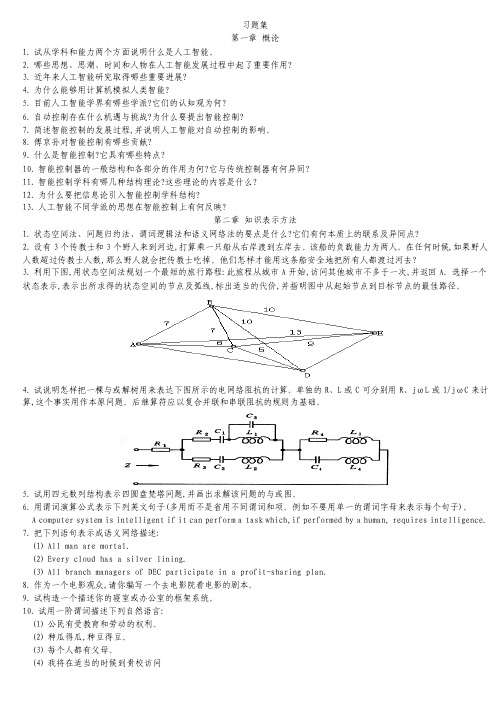
习题集第一章概论1.试从学科和能力两个方面说明什么是人工智能。
2.哪些思想、思潮、时间和人物在人工智能发展过程中起了重要作用?3.近年来人工智能研究取得哪些重要进展?4.为什么能够用计算机模拟人类智能?5.目前人工智能学界有哪些学派?它们的认知观为何?6.自动控制存在什么机遇与挑战?为什么要提出智能控制?7.简述智能控制的发展过程,并说明人工智能对自动控制的影响。
8.傅京孙对智能控制有哪些贡献?9.什么是智能控制?它具有哪些特点?10.智能控制器的一般结构和各部分的作用为何?它与传统控制器有何异同?11.智能控制学科有哪几种结构理论?这些理论的内容是什么?12.为什么要把信息论引入智能控制学科结构?13.人工智能不同学派的思想在智能控制上有何反映?第二章知识表示方法1.状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?2.设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?3.利用下图,用状态空间法规划一个最短的旅行路程:此旅程从城市A开始,访问其他城市不多于一次,并返回A。
选择一个状态表示,表示出所求得的状态空间的节点及弧线,标出适当的代价,并指明图中从起始节点到目标节点的最佳路径。
4.试说明怎样把一棵与或解树用来表达下图所示的电网络阻抗的计算。
单独的R、L或C可分别用R、jωL或1/jωC来计算,这个事实用作本原问题。
后继算符应以复合并联和串联阻抗的规则为基础。
5.试用四元数列结构表示四圆盘梵塔问题,并画出求解该问题的与或图。
6.用谓词演算公式表示下列英文句子(多用而不是省用不同谓词和项。
例如不要用单一的谓词字母来表示每个句子)。
A computer system is intelligent if it can perform a task which,if performed by a human, requires intelligence.7.把下列语句表示成语义网络描述:(1)All man are mortal.(2)Every cloud has a silver lining.(3)All branch managers of DEC participate in a profit-sharing plan.8.作为一个电影观众,请你编写一个去电影院看电影的剧本。
神经控制原理

神经控制原理
神经控制原理是指通过神经系统调节和控制生理和行为活动的机制和过程。
神经控制原理涉及中枢神经系统、周围神经系统和神经活动的调节和协调。
下面分别介绍这几个方面的神经控制原理。
1. 中枢神经系统的调节:中枢神经系统由大脑和脊髓组成,是神经控制的中枢。
大脑通过神经元之间的突触传递信号,调节和控制身体的各种功能。
中枢神经系统通过神经细胞的兴奋和抑制来控制身体的运动、感觉、认知等功能。
2. 周围神经系统的调节:周围神经系统由周围神经和神经节组成,连接中枢神经系统和身体各个组织和器官。
周围神经系统通过神经传递信号,调节和控制身体的生理活动,如内脏器官的功能调节、肌肉的收缩和松弛等。
3. 神经活动的调节和协调:神经活动的调节和协调是指中枢神经系统和周围神经系统之间的相互作用和协调。
神经活动的调节和协调使身体的各个系统和器官能够协调工作,保持内部环境的稳定性。
例如,神经系统可以通过调节心率、呼吸和血压等生理参数来适应环境变化。
总之,神经控制原理是指神经系统通过中枢神经系统和周围神经系统的相互作用和调节,控制和调节生理和行为活动。
这种调节和控制是复杂而精密的,可以使我们的身体能够适应不同的环境和需求。
神经系统的调节与控制

运动系统对行为的调节
姿势与平衡
运动系统通过调节骨骼肌的紧张度和协调性,维持身体的姿势和 平衡。
运动协调
中枢神经系统通过复杂的神经网络和反馈机制,协调不同肌肉群 的运动,实现复杂的动作和技能。
运动学习与记忆
大脑皮层通过学习和记忆机制,不断优化运动控制策略,提高运 动技能水平。
04
自主神经系统调节与控制
大脑皮层的功能
大脑皮层是中枢神经系统的高级中枢,负责认知、情感、意识等高级 神经活动。
中枢神经对感觉运动的整合
感觉信息的传入
外周感受器将感觉信息转换为神经信号,传入中枢神经系 统。
01
感觉信息的处理
中枢神经系统对传入的感觉信息进行加 工处理,识别感觉刺激的性质和强度。
02
03
感觉与运动的整合
中枢神经系统将处理后的感觉信息与 运动信息相整合,协调感觉与运动之 间的关系,保证机体对环境的适应。
中枢神经对行为的调节与控制
行为动机的产生
中枢神经系统通过感知内外环境 的变化,产生行为动机,驱动机 体做出适应性行为。
行为决策的制定
中枢神经系统根据已有的经验和 知识,制定行为决策,选择最优 的行为方案。
行为执行的调控
中枢神经系统通过调控运动系统 ,使机体按照决策执行相应的行 为,同时根据行为的反馈信息进 行实时调整。
康复
针对患者的具体情况制定个性化的康复计划,包括物理治疗、康复训练、心理支 持等;提高患者的生活质量和自理能力,减轻家庭和社会的负担。同时,关注患 者的心理健康,提供必要的心理支持和辅导。
THANKS
感谢观看
自主神经系统组成与功能
交感神经系统
负责应激反应,如“战斗或逃跑”反应,增加心率、 血压和呼吸频率。
第七章 神经控制系统
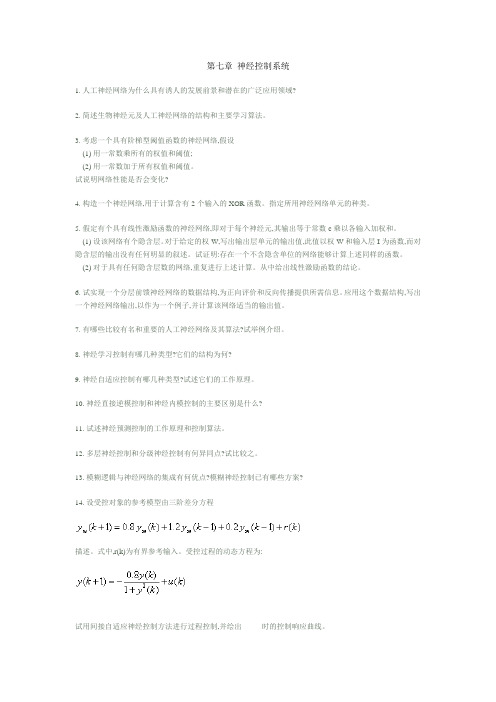
第七章神经控制系统1. 人工神经网络为什么具有诱人的发展前景和潜在的广泛应用领域?2. 简述生物神经元及人工神经网络的结构和主要学习算法。
3. 考虑一个具有阶梯型阈值函数的神经网络,假设(1) 用一常数乘所有的权值和阈值;(2) 用一常数加于所有权值和阈值。
试说明网络性能是否会变化?4. 构造一个神经网络,用于计算含有2个输入的XOR函数。
指定所用神经网络单元的种类。
5. 假定有个具有线性激励函数的神经网络,即对于每个神经元,其输出等于常数c乘以各输入加权和。
(1) 设该网络有个隐含层。
对于给定的权W,写出输出层单元的输出值,此值以权W和输入层I为函数,而对隐含层的输出没有任何明显的叙述。
试证明:存在一个不含隐含单位的网络能够计算上述同样的函数。
(2) 对于具有任何隐含层数的网络,重复进行上述计算。
从中给出线性激励函数的结论。
6. 试实现一个分层前馈神经网络的数据结构,为正向评价和反向传播提供所需信息。
应用这个数据结构,写出一个神经网络输出,以作为一个例子,并计算该网络适当的输出值。
7. 有哪些比较有名和重要的人工神经网络及其算法?试举例介绍。
8. 神经学习控制有哪几种类型?它们的结构为何?9. 神经自适应控制有哪几种类型?试述它们的工作原理。
10. 神经直接逆模控制和神经内模控制的主要区别是什么?11. 试述神经预测控制的工作原理和控制算法。
12. 多层神经控制和分级神经控制有何异同点?试比较之。
13. 模糊逻辑与神经网络的集成有何优点?模糊神经控制已有哪些方案?14. 设受控对象的参考模型由三阶差分方程描述。
式中,r(k)为有界参考输入。
受控过程的动态方程为:试用间接自适应神经控制方法进行过程控制,并绘出时的控制响应曲线。
15. 举出一个你知道的神经控制系统,并分析其工作原理和运行效果。
神经控制系统的特点

神经控制系统的特点
1神经控制系统的定义
神经控制系统是一种利用神经网络算法来解决复杂的控制问题的新技术。
它结合了传统的控制理论,通过在神经元网络中利用神经活动学习算法来实现控制算法,可以克服现有控制理论方法所遇到的非线性、弱鲁棒性等挑战,从而解决各种复杂的现实问题。
2神经控制系统的特点
1、高灵敏度:神经控制系统具有高程度的灵敏度,它可以在参数变化的情况下及时调整控制量,从而实现快速、准确的控制。
2、鲁棒性:神经控制系统具有较好的鲁棒性,它可以在一定程度上抵抗外在刺激或变化,不破坏系统的稳定性。
3、自适应性:神经控制系统具有良好的自适应性,它可以根据系统的状态变化调整参数,从而实现快速、准确的控制。
4、节省空间:神经控制系统可以将复杂的算法、控制量及参数集合在一起,节省计算机芯片空间。
5、抗失真能力:神经控制系统具有一定的抗失真能力,它可以适应不确定性因素并进行准确性调整。
3神经控制系统的应用
神经控制系统广泛应用于汽车、机器人、空气能、广播通信等领域,可以在实际工程中实现复杂的控制功能。
它可以实现快速、准确的非线性控制,实现汽车自动驾驶、机器人姿态控制以及空气能控制和广播通信信号定向设计等应用。
4结论
神经控制系统是一种将传统控制理论和神经网络算法有机结合的新技术。
它具有高灵敏度、鲁棒性和自适应性等特性,有效地解决现实中复杂的控制问题,在汽车、机器人、空气能、广播通信等领域有着广泛的应用。
神经反馈控制系统的研究及其应用

神经反馈控制系统的研究及其应用神经反馈控制系统是一种基于人体神经系统的控制方法。
该系统通过观察人体神经反应,将这些反应转化为控制信号,然后控制外部设备或执行某些动作。
经过多年的研究,神经反馈控制系统已经成为了医疗、运动、认知科学等领域中不可或缺的研究手段。
一、神经反馈控制系统的原理神经反馈控制系统的基本原理是将人体神经反应转化为控制信号,实现控制器对目标设备或行为的控制。
常见的神经反馈控制系统包括脑机接口(BCI)和电脑神经反馈(CNF)等。
BCI系统是一种将人体脑电信号转化为机器输入信号的技术,实现人体脑波信号与计算机之间的通讯。
该技术的核心在于通过EEG(脑电图)记录人脑皮层活动,将其转化为控制信号,从而控制外部设备。
CNF系统是一种将人体生理信号转化为输出信号的技术。
该技术包括心率变异反馈(HRV)和心电图反馈(ECG)等。
其原理是通过传感器记录人体心跳和呼吸等生理信号,将其转化为控制信号,从而控制外部设备。
二、神经反馈控制系统的应用神经反馈控制系统在医疗、运动和认知科学等领域中有着广泛的应用。
1. 医疗领域神经反馈控制系统在医疗领域中的应用非常广泛。
例如,在神经科学中,BCI技术可以被用来恢复运动能力,帮助脑机接口患者做出特定动作,从而实现自主控制肢体的能力。
在心理治疗中,CNF技术可以通过观察患者的心跳和呼吸等生理反应,帮助医生了解患者的情绪状态和心理健康状况。
2. 运动领域神经反馈控制系统在运动领域中也有广泛的应用,例如, NBA 篮球教练们使用脑机接口技术,通过悟空头戴式脑电设备来训练球员的集中注意力。
在游泳、跳水等运动项目中,CNF技术可以帮助运动员掌握呼吸节奏,提高运动表现。
3. 认知科学领域神经反馈控制系统在认知科学中有着重要的应用,例如,研究人员通过BCI技术来探索人脑对语言、视觉和运动的处理方式等。
通过对脑电图等神经信号的测量和分析,研究人员可以研究人脑对不同信息的认知和处理过程。
神经系统是如何控制身体运动的?
神经系统是如何控制身体运动的?随着科学技术的日益进步,人们对于身体内部的机理和运作方式逐渐有了更好的了解。
神经系统作为人体的控制中枢,扮演着重要的角色。
那么,神经系统是如何控制身体运动的呢?一、运动神经元发出指令在人体运动时,运动指令是由大脑运动皮层向下传递,通过下丘脑、脑干进行调节,最终传递到脊髓。
在脊髓内,运动神经元接收到来自脑部的信号后,会发出指令,将神经冲动传递到肌肉。
这个过程被称为运动神经元的递质释放。
递质可以使肌肉收缩、松弛,从而实现肢体的运动。
二、神经肌肉接头共同作用在神经系统控制下,神经肌肉接头是实现身体运动的重要部分。
当运动指令到达神经肌肉接头时,神经肌肉接头会不断接收到神经冲动。
这些冲动可以使肌纤维收缩,产生力量,最终推动身体的运动。
不同的神经肌肉接头对于不同部位的肌肉都有不同的控制。
三、运动控制更加精细化神经系统控制身体运动的精细化程度与年龄、性别、身体活动水平等因素有关。
每个人都有不同的肌肉、神经控制方式等等,因而需要针对性地训练。
通过运动锻炼和科学训练,人们可以进一步提高身体的运动控制和协调性。
四、神经系统控制身体反应除了控制身体运动之外,神经系统还负责控制身体反应。
例如,触摸热物时,神经系统会向脑部发出警报,脑部通知肌肉向远离热源的方向运动。
又如,眼睛看到危险时,神经系统会使身体快速做出反应,保证身体的安全。
五、神经系统可以实现自动调节除了意识性运动之外,还有很多身体的运动是由神经系统自动调节的。
例如,人体呼吸、心跳、消化等等都是由神经系统自动控制的。
这种自发的、自动调节的运动,既在意识之外,同时也为身体的正常运作和生命活动提供了重要支持。
总的来说,神经系统控制身体的运动和反应,实现了身体内部和外部环境的协调和平衡。
我们应该重视身体锻炼,提高身体运动控制能力,从而促进身体的健康发展。
神经系统控制身体的指挥中心

神经系统控制身体的指挥中心神经系统是人体内的一个重要系统,它起着控制和调节身体各部位活动的作用。
作为身体的指挥中心,神经系统通过神经细胞、神经纤维和神经节等,将信息传递给身体各个部位,实现各个系统之间的协调和平衡。
本文将从神经系统的结构和功能、神经系统对身体活动的控制以及神经系统与其他系统的关系等方面进行论述。
一、神经系统的结构和功能1.中枢神经系统(Central Nervous System,简称CNS)中枢神经系统包括大脑和脊髓,是整个神经系统的核心部分。
大脑负责思维、意识和情感等高级功能,脊髓则负责传递信息和控制简单反射动作。
2.外周神经系统(Peripheral Nervous System,简称PNS)外周神经系统由神经纤维、神经节和神经末梢组成,负责将信息传输到中枢神经系统并将指令从中枢神经系统传播到身体各个器官和组织。
二、神经系统对身体活动的控制1.感觉功能神经系统通过感受器官获得外界环境的信息,例如视觉、听觉、触觉等。
这些感受信息通过神经纤维传递到中枢神经系统,其感觉区接受并产生相应的感觉体验。
2.运动功能神经系统通过神经纤维传递中枢神经系统的指令,控制肌肉的收缩和放松,实现身体各部位的运动。
这种控制可以是自主控制,也可以是反射控制。
三、神经系统与其他系统的关系1.神经系统与呼吸系统神经系统通过控制呼吸肌的收缩和松弛,调整呼吸频率和强度,以保持呼吸的稳定状态。
2.神经系统与循环系统神经系统通过控制心脏的收缩和松弛,调节心跳速率和强度,维持循环系统的正常运转。
3.神经系统与消化系统神经系统通过控制消化器官的蠕动和分泌,调节消化功能,保证食物的消化吸收过程。
4.神经系统与内分泌系统神经系统通过神经激素与内分泌系统进行相互作用,调节内分泌系统的分泌活动,维持体内的平衡和稳定。
结语神经系统作为人体的指挥中心,扮演着重要的角色。
它通过形成复杂的神经网络,将大脑和身体各个部位连接起来,实现身体的运动、感觉、调节等功能。
生物系统的神经控制机制

生物系统的神经控制机制在自然界中,生物系统中的神经控制机制被认为是至关重要的,因为它可以影响行为和身体功能。
本文将探讨生物系统的神经控制机制是如何工作的,以及它对人类的影响。
神经系统的结构和功能神经系统是人类和动物身体的主要控制中心。
它由一个庞大的网络组成,其中包括大脑、脊髓、神经节以及神经末梢。
这个网络中的每个元素都与其他元素相互关联,并能够接收和传输信息。
神经系统的主要功能是感知、集成和响应刺激。
感知是指当身体受到外界刺激时,神经元会通过神经传递将这些信息发送到大脑或脊髓中进行处理。
处理这些信息的过程被称为集成,大脑和脊髓可以将不同类型的信息联合起来,并根据之前积累的经验和知识做出相应的决策。
最后,响应发生在神经元向肌肉或其他器官发送命令,以执行某种行为或调节某种身体功能的过程中。
神经元的结构和功能神经元是神经系统的基本单元。
它由三个主要部分组成:细胞体、轴突和树突。
细胞体包含神经元的核心部分,其中包括关键的细胞器,如线粒体、内质网和高尔基体。
除了这些细胞器,细胞体还包含细胞核和细胞质。
轴突是神经元的长纤维,负责将电信号从细胞体传递到其他神经元或肌肉细胞。
轴突末端释放神经递质,以便与其他细胞进行通信。
树突是神经元的分支,它们负责接收其他神经元传递的消息。
树突可以从其他神经元接收多个信号,并将它们集成到单个信号中,这个信号被发射到轴突,然后传递给其他神经元。
神经递质和突触神经递质是一种化学物质,它通过神经元之间的连接处(突触)传递信息。
当神经神经冲动通过轴突传递时,它到达突触末端,然后释放神经递质。
神经递质穿过突触间隙,到达相邻神经元或肌肉细胞,并激活它们。
突触是神经元之间传递信息的场所。
突触有两个主要部分:突触前端和突触后端。
突触前端位于神经元的轴突末端,它负责释放神经递质。
突触后端是与其相连的神经元或肌肉细胞的一侧,它负责接收释放的神经递质。
神经网络和控制机制神经网络是神经元之间的复杂连接,形成一种交织在一起的网络。
神经系统的结构与功能调控

神经系统的结构与功能调控神经系统是人体的主导系统之一,担负着传递信息、调节身体机能、产生情感等重要任务。
其结构和功能被广泛研究,不断发现新的治疗和改善方法。
本文将探讨神经系统的结构和功能调控,希望对读者有所启发。
一、神经系统的结构神经系统的结构包括中枢神经系统和周围神经系统,前者由大脑和脊髓构成,后者由神经组织和神经元构成。
神经元是神经系统的基本单位,是一种特殊的细胞,具有接受、传递和处理信息的功能。
神经元由三个部分组成:细胞体、树突和轴突。
细胞体是神经元的主体,包含核和质体等相关器官。
树突是神经元的输入部分,接收来自其他神经元的信号,把信号传递给细胞体。
轴突则是神经元的输出部分,将信号传递给其他细胞。
神经元之间的通讯是通过神经元突触实现的。
神经元突触包括轴突末端和神经元树突。
当一个神经元被刺激时,通过轴突末端释放化学物质,称为神经递质,将信息传递到神经元树突,从而引起神经元的兴奋或抑制。
二、神经系统的功能调控神经系统的功能调控是一个复杂的过程,需要多种因素参与。
以下是几个与神经系统功能调控相关的因素。
1.神经递质作为神经元间通信的媒介,神经递质在神经系统的功能调控中发挥着重要作用。
不同的神经递质对人体有不同的作用,例如,多巴胺和血清素与情感和行为有关,乙酰胆碱和谷氨酸与认知和学习有关等。
因此,改变神经递质的含量或代谢,可以影响神经系统的功能。
例如,抗抑郁药物主要作用是通过增加血清素和/或多巴胺等神经递质的含量来减轻抑郁症状。
相反,某些药物可影响神经递质的代谢,从而影响神经系统的功能。
2.内分泌系统内分泌系统是人体的另一个主导系统,与神经系统密切相关。
内分泌系统通过分泌激素调节人体内部的代谢、生理和心理状态。
神经系统和内分泌系统的交互作用是通过下视丘-垂体-靶器官的轴来实现的。
例如,当身体感受到外部威胁,下视丘会分泌促肾上腺皮质激素释放激素(CRH),这将刺激垂体释放促肾上腺皮质激素(ACTH),从而刺激肾上腺皮质释放皮质醇。
《神经调节》神经系统:生命控制器

《神经调节》神经系统:生命控制器在我们神奇的身体里,神经系统就如同一个无比精密且高效的“生命控制器”,它时刻掌控着我们身体的每一个动作、每一种感觉和每一个思绪。
神经系统,这个复杂而又令人惊叹的网络,由无数的神经元组成。
神经元是神经系统的基本单位,它们就像一个个小小的信息传递员,通过电信号和化学信号在身体里迅速地传递着各种指令和信息。
让我们先来了解一下神经系统的基本构成。
神经系统主要分为中枢神经系统和周围神经系统两大部分。
中枢神经系统包括脑和脊髓,它们是整个神经系统的核心指挥中心。
脑又可以细分为大脑、小脑和脑干等部分。
大脑是我们思考、感知和决策的关键部位,它让我们能够产生复杂的思想和情感,进行创造性的活动。
小脑则主要负责协调和平衡我们的身体运动,确保我们能够行走、跑步、跳跃等动作的精准和稳定。
脑干连接着大脑和脊髓,控制着许多基本的生命功能,如呼吸、心跳和消化等。
脊髓则像是一条信息高速公路,它将身体各个部位的感觉信息传递到大脑,并将大脑发出的指令传递到身体的肌肉和器官。
周围神经系统则像无数的支线,将中枢神经系统与身体的各个角落连接起来。
它包括脑神经和脊神经,负责传递各种感觉和运动信号,让我们能够感知外界的刺激并做出相应的反应。
神经调节的过程就像是一场精心编排的舞蹈。
当我们的身体受到外界的刺激,比如触摸到一个热的物体,皮肤上的感受器会立即将这个信息转化为神经冲动,并通过传入神经将其传递到中枢神经系统。
中枢神经系统接收到这个信号后,迅速进行分析和处理,然后通过传出神经将相应的指令传递到肌肉或腺体等效应器,让我们的手迅速缩回,避免被烫伤。
在这个过程中,神经递质起到了至关重要的作用。
神经递质是神经元之间传递信息的化学物质,它们就像一把把小小的钥匙,打开了神经元之间信息传递的大门。
不同的神经递质有着不同的作用,有的能够激发神经元的活动,有的则能够抑制神经元的活动,从而实现对神经系统功能的精细调节。
神经系统的调节功能不仅在应对外界刺激时发挥着关键作用,还在维持身体内部环境的稳定方面起着不可或缺的作用。
智能控制-第七章 神经控制系统概要

图7.16 基于神经网络的监督式控制
实现NN监督式控制的步骤如下: • 通过传感器和传感信息处理,调用必要的和有用的控制信息。 • 构造神经网络,即选择NN类型、结构参数和学习算法等。 • 训练NN控制器,实现输入和输出间的映射,以便进行正确的 控制。
• 非线性映射;
• 通过训练进行学习; • 适应与集成;
• 硬件实现.
人工神经网络的应用: (1) 模式信息处理和模式识别; (2) 最优化问题计算;
(3) 复杂系统控制;
(4) 通信。
7.2 人工神经网络的模型与结构
7.2.1 生物神经元模型
神经元的主要组成部分:细胞体、轴突、树突、突触等。
从生物控制论的角度,神经元作为控制和信息处 理的基本单元,具有以下几个重要功能和特点: 1) 动态极化原则; 2) 时空整合功能; 3) 兴奋与抑制状态; 4) 脉冲与电位转换;
) j的目标输出。 y (j t为神经元
另一种适于训练MLP的学习算法是遗传算法(GA) 该算法以某个随机产生的染色体 群体开始,并应用基因算子产生 新的更为合适的群体。选择算子 从现有群体选择染色体供繁殖用。 交叉算子通过在随机位置切开染 色体并交换切开后续位置内的成 分,从两个现存的染色体产生两 个新的染色体。变异算子通过随 机地改变现有染色体的基因,产 生新的染色体。这些算子一起模 拟一个导向随机搜索方法,此方 法最终能够求得神经网络的目标 输出。
图7.6 一个受训练的GMDH网络
图7.7 一个GMDH神经元的详图
7.3.3 自适应谐振理论(ART)网络
1. ART-1版本
用于处理二值输入,从下图可以看出,一个ART-1网络含有两层, 一个输入层和一个输出层。这两层完全互连,该连接沿着正向(自 底向上)和反馈(自顶向下)两个方向进行。 当ART-1网络在工作时,其训练是连续进行的,包括8个步骤。
神经系统运动调控课件

神经肌肉接头通过乙酰胆碱作为传递介质,将神经冲动从突触前膜传递到突触后膜,引起肌肉纤维的兴奋和收缩。
神经肌肉接头的信纤维在兴奋状态下发生的形态和功能变化,导致肌肉缩短和产生力量。
肌肉收缩的机制
02
肌肉收缩涉及到肌丝的相互作用和滑行,当肌肉纤维兴奋时,肌丝发生相对滑行,导致肌肉缩短和产生力量。
神经系统运动调控课件
目录
神经系统概述运动调控机制神经系统与运动的关系运动调控的生理学基础运动调控的心理学基础运动调控的实践应用
01
神经系统概述
作为神经系统的基本单位,负责处理和传输信息。
神经元
支持神经元的生长和功能,提供营养和保护。
神经胶质细胞
由大量神经元相互连接形成的复杂网络,实现信息的传递和处理。
外周神经系统
02
运动调控机制
运动神经元概述
运动神经元是神经系统中的一类神经元,负责将神经冲动传递给肌肉纤维,引起肌肉收缩,从而产生运动。
运动神经元的分类
根据功能和形态,运动神经元可分为多极运动神经元和单极运动神经元。多极运动神经元主要负责控制骨骼肌的运动,而单极运动神经元则主要负责控制平滑肌和心肌的运动。
运动训练对神经系统的益处
不同类型的运动训练对神经系统的影响不同,如力量训练可以增强肌肉力量和耐力,有氧训练可以提高心肺功能和耐力。
不同运动训练对神经系统的影响
03
不同运动康复方案对神经系统的影响
针对不同类型和程度的神经系统损伤,制定个性化的运动康复方案,以达到最佳的康复效果。
01
运动康复与神经系统的关系
运动对神经元的可塑性
神经系统对运动协调的调控
神经系统通过复杂的信号传递和整合,精确控制肌肉的协调运动,实现各种复杂的动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第七章神经控制系统
1. 人工神经网络为什么具有诱人的发展前景和潜在的广泛应用领域?
2. 简述生物神经元及人工神经网络的结构和主要学习算法。
3. 考虑一个具有阶梯型阈值函数的神经网络,假设
(1) 用一常数乘所有的权值和阈值;
(2) 用一常数加于所有权值和阈值。
试说明网络性能是否会变化?
4. 构造一个神经网络,用于计算含有2个输入的XOR函数。
指定所用神经网络单元的种类。
5. 假定有个具有线性激励函数的神经网络,即对于每个神经元,其输出等于常数c乘以各输入加权和。
(1) 设该网络有个隐含层。
对于给定的权W,写出输出层单元的输出值,此值以权W和输入层I为函数,而对隐含层的输出没有任何明显的叙述。
试证明:存在一个不含隐含单位的网络能够计算上述同样的函数。
(2) 对于具有任何隐含层数的网络,重复进行上述计算。
从中给出线性激励函数的结论。
6. 试实现一个分层前馈神经网络的数据结构,为正向评价和反向传播提供所需信息。
应用这个数据结构,写出一个神经网络输出,以作为一个例子,并计算该网络适当的输出值。
7. 有哪些比较有名和重要的人工神经网络及其算法?试举例介绍。
8. 神经学习控制有哪几种类型?它们的结构为何?
9. 神经自适应控制有哪几种类型?试述它们的工作原理。
10. 神经直接逆模控制和神经内模控制的主要区别是什么?
11. 试述神经预测控制的工作原理和控制算法。
12. 多层神经控制和分级神经控制有何异同点?试比较之。
13. 模糊逻辑与神经网络的集成有何优点?模糊神经控制已有哪些方案?
14. 设受控对象的参考模型由三阶差分方程
描述。
式中,r(k)为有界参考输入。
受控过程的动态方程为:
试用间接自适应神经控制方法进行过程控制,并绘出时的控制响应曲线。
15. 举出一个你知道的神经控制系统,并分析其工作原理和运行效果。