2-挠性传动解析
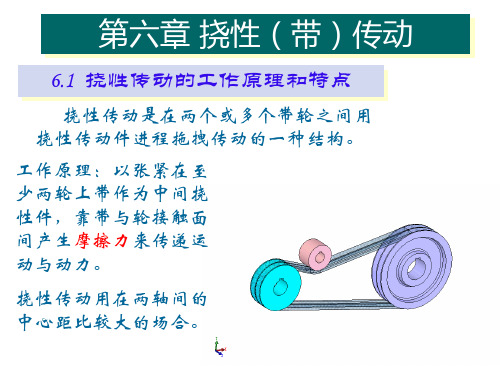
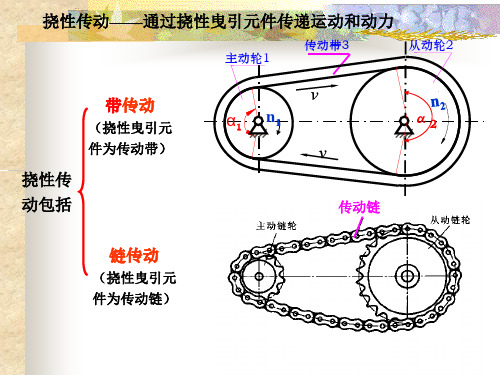
挠性传动

两轮间以链条为中间挠性元件的啮合来传递动力和运动
3.链传动的特点及应用
优点: 平均速比im准确,无滑动; 结构紧凑,轴上压力小; 传动效率高η=98%; 承载能力高P=100KW; 可传递远距离传动amax=8m; 成本低。
缺点: 瞬时传动比不恒定; 传动不平稳; 传动时有噪音、冲击; 对安装精度要求较高。
Y、Z、A、B、C、D、E
小
大
YZ
A
B
C
D
E
普通V带的截面尺寸 GB/T11544-1997 (2)长度标准
基准长度为标准值(公称长度)。
4.标记
由带型号、基准长、标准号(GB/T11544-1997)组成。如 B-4000GB/T11544-1997。 通常打印在带的外表面。
动和动力的。有同步齿形带传动和齿孔带传动两种形式。 1.同步齿形带传动 2.齿孔带
特点:兼有带传动和齿轮传动 的优点,吸振、i 准确。常用于 传动比要求较准确的中、小功率 的传动,如电影放映机、打印机、 录音机、磨床及医用机械中
轿车发动机
机器人关节
二、链传动 1.链传动的组成 链传动由主动链轮、从动链轮 和绕在链轮上的链条所组成。
一、普通V带
1.V带的结构 是无接头的环形带
V 包布层:橡胶帆布,保护作用
带 伸张层:拉伸 截
帘布结构:一般传动
面 强力层:承受载荷的主体
组
绳芯结构:柔韧性好、直径小、速度高的场合
成 压缩层:压缩
2.几个重要概念
节面:带绕过带轮弯曲时,内、外层之间长度不变的中性层。
节宽:节面的宽度b p。
基准直径:V带装在带轮上后,与节宽对应的带轮直径d d 。 基准长度:与带轮基准直径处相对应的带的周线长度,用Ld表示。
挠性联轴器工作原理

挠性联轴器工作原理
挠性联轴器是一种常用的机械传动装置,它通过柔性补偿元件来实现两个轴的连接和传递力矩。
其工作原理如下:
1. 柔性补偿元件:挠性联轴器一般采用金属弹簧、橡胶等材料制成的柔性补偿元件,这种材料具有一定的柔性和弹性,可以在一定范围内变形和回复形状。
2. 轴的连接:挠性联轴器的两端分别与传动轴连接。
它通常包括外套和内衬两部分,外套通过螺栓或销钉固定在轴上,内衬则通过特殊的结构固定在另一根轴上。
3. 工作原理:当两根轴旋转时,传递的扭矩会使得挠性联轴器的柔性补偿元件发生变形。
金属弹簧可以弯曲,橡胶可以压缩和伸展,这种变形会吸收传动过程中产生的震动、冲击和轴的偏心等不利因素,从而保护传动装置的正常工作。
4. 能量传递:挠性联轴器通过柔性补偿元件将扭矩从一根轴传递到另一根轴。
当一根轴转动时,它与挠性联轴器的外套发生相对运动,通过内衬的连接,扭矩逐渐传递到另一根轴上。
5. 适应性:挠性联轴器具有一定的柔性和变形能力,可以适应轴的偏心、轴的倾斜等情况,确保传动装置在一定范围内保持稳定的工作。
总之,挠性联轴器通过柔性补偿元件实现了两根轴的连接和扭
矩传递,并且具有良好的吸震、减震和缓冲功能,保证了传动装置的正常工作。
《挠性传动设计》课件

挠性轴的设计和选择
挠性轴的设计和选择需要考虑多个因素,包括传动 的类型、工作条件、传递的功率等。
弹性联轴器的分类和适用范围
弹性联轴器包括齿轮弹性联轴器和橡胶弹性联轴器, 分别适用于不同的传动条件和领域。
齿轮弹性联轴器的优缺点
齿轮弹性联轴器是传动机构中较为常用的种类之一。齿轮弹性联轴器的优点在于具有可靠性高、 寿命长和承载能力大等优点,但是也存在一些缺点,如振动大、噪音大等。
挠性传动的特点
传动效率高、承载能力强、减震 降噪。
弹性联轴器的分类
齿轮弹性联轴器和橡胶弹性联轴 器。
使用挠性传动的常见问题
振动过大、磨载能力大
缺点
振动大、噪音大、传动效率低
橡胶弹性联轴器的优缺点
橡胶弹性联轴器是一种以橡胶制品为主体的弹性联轴器,具有防震、减噪和柔软的特点,广泛应 用于机械传动领域。
1
优点
防震、减噪、柔软
2
缺点
寿命相对较短、对安装精度的要求较高
使用挠性传动的常见问题及解决方案
使用挠性传动经常会遇到一些问题,如振动、磨损等,下面是一些常见问题的解决方案。 • 问题1:振动过大 • 解决方案:增加传动轴的刚度,或增加系统的阻尼; • 问题2:磨损过快 • 解决方案:材料的选择、表面处理的改进、应力平衡的优化等。
《挠性传动设计》PPT课 件
本课件将介绍挠性传动的特点、设计和选择、弹性联轴器的分类、齿轮弹性 联轴器和橡胶弹性联轴器的优缺点、使用挠性传动的常见问题及解决方案, 最后进行总结。
挠性传动的概念和原理
挠性传动是通过在传动机构中添加一定柔性来实现传递动力的一种机械传动方式,达到减震、降噪的效果。挠 性传动主要用于中小功率的传动领域,应用非常广泛。
第9章 挠性传动[92页]
![第9章 挠性传动[92页]](https://img.taocdn.com/s3/m/67730738284ac850ac024248.png)
F F1 F2
F1 F2 2F0
Ff F1 F2 F
P F v 1000
当带有打滑趋势时,摩擦力即达到极限值,此时的拉力差(有效拉力)为带所能传递的
最大圆周力。
带的紧边拉力与松边拉力二者的临界值之间的关系,可由柔韧体摩擦的欧拉公式确
定:
F1 e f F2
e为自然对数的底
F1 F2 F
1
d1
a
2
d2
L
2a
2
(d1
d2
)
(d2
d1)2 4a
.带传动的张紧
带工作一段时间后,因永久伸长松弛,应将带重新张紧。 方法:调节中心距或采用张紧轮。
水平张紧
张紧轮张紧
.带传动优点
1 、带具有挠性和弹性,可吸收振动、缓和冲击,使传动平稳、 噪音小;
2、 当过载时,带与带轮之间可发生相对滑动而不损伤其它零件,有 过载保护作用;
3 、适合于主、从动轴间中心距较大的传动 4、 结构简单,成本低廉 。
用于中小功率电动机与工作机械之间的动力传递。 带速 5~25m/s, 传动比≤7。
缺点
1、外廓尺寸较大 2、摩擦式带传动有弹性滑动和打滑的现象,不能保证固
定的传动比, 3、由于需要施加张紧力,所以会产生较大的压轴力,使
轴和轴承受力较大, 4、带的寿命较短,传动效率较低。
机械设计基础
主编:王 毅 程 强 薛云娜 陈照强
目录
第9章 挠性传动
• 9.1 挠性传动概述
• 9.2 带传动概述
• 9.3 普通带传动的工作性能分析
• 9.4 V带传动设计
• 9.5 同步齿形带和高速带传动简介
• 9.6 链传动
• 9.7 挠性传动的历史、现状及发展趋势简介
挠性传动的定义

撓性傳動之特性
1.帶輪係一種間接傳達運動機構,藉撓性 物—皮帶或繩來傳達運動。 2.使用於兩軸軸距遠的場合。 3.皮帶或繩的傳達運動完全借助摩擦力。 4.皮帶或繩與傳動輪間難免會有些許的滑動, 故速比無法保持一定。 5.撓性傳動之特性: 僅能傳達拉力。 屬於間接接觸傳動。
皮帶傳動之優缺點
1.優點: 裝置簡單、成本低。 較安全(皮帶與傳動輪間有些許之滑動,當超 負荷時,會產生打滑現象,保護機件免於損 壞。) 控制從動軸之轉動與否,較為方便。 兩軸間距離較遠。 2.缺點: 轉速比不正確(不含同步皮帶)。 滑動損失大(一般約2﹪~3 ﹪,不含同步皮帶) 因滑移產生,傳動效率較差。
平皮帶的接合方法:『一、縫接法』
先把皮帶兩端對接,在靠近接面處打一些小 孔,利用強力耐磨的線或是細鋼絲,將皮帶 的兩端予以接合。
平皮帶的接合方法:『二、整體製成法』
此皮帶為一體成形的製成,整個帶圈無任何 的接頭,直接套在帶輪上即可使用。
平皮帶的接合方法:『六、焊接法』
將鋼帶兩端對齊後,以電焊對頭焊接法把皮 帶兩端接合起來。
防止帶圈脫落的方法
防止帶圈脫落的方法
三、隆面帶輪(crowned pulley) 1.將帶輪輪面中間部隆起而成,其輪面常採用球面 或雙圓錐面。 2.是防止皮帶脫落最常採用的方法。 3.在一對帶輪中,只允許一輪為隆面帶輪,其中央 1 1 點隆起之高度約為輪面寬的 至 。 100 50 4.要注意的是中央隆起的高度不要大於輪面寬度 的 1,否則容易使皮帶磨損。 20 5.採用中央隆起之帶輪可使皮帶在靠輪面中央之側 其張力較大,故皮帶逐漸自左向右移動而達於中 心穩定狀態位置,不再左右移動。
皮帶之種類:『二、三角皮帶』
10.其內部構造: 抗張體(tensile cord):承受張力的主要部分。 緩衝材料(cushion section):用以保護抗張體。 拉伸膠層(overcord section):位於抗張體上 方之膠層。 壓縮膠層(undercord section):位於抗張體下 方之膠層。 外皮(cover):為橡皮與織物織成。
第03章挠性传动

皮带可以传递的最大功率
Ft v P= = 1000
精 密 机 械 设 计
([σ ] − σ b1 − σ c )(1 −
1 e
) Av f 'α
1000 1 σ1(1 − f 'α ) Av Ft v e P= kW = 1000 1000
kW
相应的参数到书上查表
32
经验公式
100 P 2 A = δ ×b = ( mm ), [ Pj ]
精密机械设计
精 密 机 械 设 计
第三章 挠性传动
徐峰
2003.2
1
第三章 挠性传动
挠性传动是依靠挠性连接件:绳子、 链、皮带、齿形带等等,间接地将 主动轮上的运动和动力传递给从动 轮。
精 密 机 械 设 计
这种传动的轮间中心距比较大, 而且可以根据需要进行调节。
2
挠性传动图
精 密 机 械 设 计
由于带的弹性而产生的带与带轮之间的相对滑动 称为弹性滑动。 v1 − v 2 弹性滑动的特点 不可避免的 弹性滑动率 ε = v1 × 100 %
弹性滑动的后果 速度损失、效率降低、带的磨损
精 密 机 械 设 计
n1 D2 D2 = ≈ ( ε = 1 % ~ 2 %) i= n 2 D 1 (1 − ε ) D 1
带轮直径D1,D2 带根数z 中心距 a 带长 L,带 δ × b 初拉力F0 压轴力Q 带轮结构
35
被动轮转速n2 工作条件
设计的大致步骤
1.选择传动形式和皮带种类 2.确定带轮的基准直径D1和D2
P D1 = (1100 ~ 1350)3 n1
精 密 机 械 设 计 4.确定中心距a 和皮带的长度L 3.验算带速:
第六章挠性传动
一、同步带结构
• 组成: • 1. 强力层:多采用钢丝绳或玻璃纤维。布置在
带的节线位置。 • 2. 基体:带齿—与带轮轮齿啮合 • 带背—用来粘结包覆强 • 力层。常用材料为聚氨脂 • 和氯丁橡胶。
• 国产同步带采用周节制,也有采用模数制。
产生的应力;由离心力产生的应力以及由于带在带 轮上弯曲产生的应力。
1.张紧拉应力:1
F1 A
;
2
F2 A
2.离心拉应力: c
F A
qv 2 A
;q
每米带长的质量
3.弯曲应力: b
Mb W
E
;
D
带厚
最大应力发生在带紧边进入小带轮处:
max 1 b1 c
6.5、同步带传动简介
• 运行时,带齿与带轮的齿槽相啮合传递运动 和动力。综合了皮带传动、链传动和齿轮传 动各自优点的新型带传动。
优点:轴承载荷小,包角小或中心距小而传动比大。 缺点:带的弯曲损失大,挤压发热大。
6.3带传动中的主要几何参数
(1)包角a 带和带轮的接触弧对应的中心角称为包角, 以a表示。
a1
180
2
1800
D2
D1 a
1800
1800
D2
D1 a
57.30
(2)带的长度L
L 2 a2 ( D2 D1 )2 D2 ( 2 ) D1 ( 2 )
挠性带传动比
在带与带轮无相对滑动时,皮 带传动的传动比称为名义传动比 :
i n1 D2 n2 D1
当外载荷大到一定值时,带与带轮间产生全面滑动
滑动率-从动轮速度的降低率:
V1 V2 100 %
V1
弹性滑动是由拉力差引起的,只要传递
第5章 挠性传动解读

离心拉(应)力作用于带的整个周长,且处处相等 3.弯曲应力
σb1=Eh/dd1 σb2=Eh/dd2 式中:h为带的高度(mm);E为带的弹性模量(MPa);dd为带轮基准直径。
弯曲应力只作用在绕过带轮的那一部分带上
最大应力发生在紧边与小带轮相切处(紧边开始绕上小带轮处)
四、带传动的弹性滑动
由于带弹性体,因而在拉力的作用下带 会产生弹性变形(伸长) 。 紧边:受力F1,变形δ1 松边:受力F2,变形δ2 F1> F2 ,δ1 > δ2 松边
紧边:F0→F1 松边:F0→F2 拉力增加,带增长 拉力减小,带收缩
带是弹性体,可认为其总长不变,则: 紧边拉力增量 = 松边拉力减量 即: F1 -F0 = F0 - F2
故: F1 +F 2 = 2 F0
有效拉力(Effective tensile force): F1-F2 =F =Ff
— 即带所传递的圆周力 F 以主动轮侧的带为隔离体分析:
一链传动的运动分析在链传动中链条绕在链轮上如同绕在两个正多边形的轮子上正多边形的边长等于链节距链传动工作情况分析销轴中心的圆周速度水平分量链速垂直分量链节所对中心角上述反映了链速的周期性变化
第5章 挠性传动设计
带传动概述
带传动的几何计算及基本理论 普通V带传动设计
链传动概述
链传动工作情况分析 滚子链传动设计
F2 Ff D1 F1
n2
Ff
F1 = F0 +F/2 (1) F2 = F0 -F/2 (2)
分析带在即将打滑时,紧边拉力F1与松边拉力F2的关系。得 到挠性体摩擦的基本公式,称为欧拉公式: F1/ F2=efvα (3) 式中:fv为带与轮面间的摩擦系数;α为带轮的包角(rad); e为自然对数的底(e≈2.718) 通过上面(1)(2)(3)式求解得V带不打滑条件下所能 传递的最大圆周力: 1 e f va 1 F1 (1 f va ) Fmax 2F0 f va e e 1
第二章 挠性传动(带传动)
开口传动
交叉传动
半交叉传动
多从动轮传动
第二章 带传动
三.V带
1. V带截面尺寸:
V带已标准化,截面呈等腰梯形,普通V带共七种型号 (GB/T1313575.1-92)
Y、Z、A、B、C、D、E
小
大
Y型截面最小,E型最大。 窄V带共四种型号 :SPZ、SPA、SPB、SPC 2.V带的构成:
V带由顶胶、抗拉体、底胶和 包布等4部分组成。
ΣFf
1.组成:
ΣFf
主动轮
n2
从动轮 挠性带
n1
T1
主动轮
从动轮
2.工作原理:
挠性带紧套在带轮上,使带与带轮接触面间作用有正压力,靠带与带轮间的
摩擦力ΣFf传递运动和动力。
第二章 带传动
二、带传动的类型
1 . 按带的截面形状分
平带 V型带 多楔带 圆形带
第二章 带传动
2.按带的传动方式分
开口传动 交叉传动 半交叉传动 多从动轮传动
解:有效拉力 Fe=1000P/v =∑Ff = F1 - F2
P=0.5KW时
Fe=1000P/v =1000×0.5/4=125N
P=1.0KW时
Fe=1000P/v =1000×1.0/4=250N
P=1.5KW时
Fe=1000P/v =1000×1.5/4=375N
P=2.0KW时
Fe=1000P/v =1000×2.0/4=500N
•通常情况下为保证 α 1≥120°,常使带传动的传动比i≤7; • 因为小轮包角 α 1 小于大轮包角α 2,计算F max 时应以α 1代入式(4); •如果打滑,首先发生在小轮上。
第二章 带传动
第七章挠性传动
(4)圆形带: 横截面为圆形。 只用于小功率传动。
第七章挠性传动
三、摩擦带传动工作情况分析 1.受力分析 (1)工作前
带张紧在带轮上
接触面产生正压力,当传动带静止时带两边产生等值初 拉力F0。
第七章挠性传动
轿车发动机
机器人关节
第七章挠性传动
二、摩擦带传动
1.工作原理 带紧套在主、从动带轮上的,
使带与带轮的接触面间产生一 定的正压力,当原动机驱动主 动带轮转动时,由于带与带轮 之间摩擦力的作用,使从动带 轮一起转动,从而实现运动和 动力的传递。
第七章挠性传动
2.按传动带的截面形状分 (1)平带: 平带的截面形状为矩形,内表面为工作面。
第七章挠性传动
一、啮合带传动 利用带内侧的齿或孔与带轮表面上的齿相互啮合来传递运
动和动力的。有同步齿形带传动和齿孔带传动两种形式。 1.同步齿形带传动 2.齿孔带
特点:兼有带传动和齿轮传动 的优点,吸振、i 准确。常用于 传动比要求较准确的中、小功率 的传动,如电影放映机、打印机、 录音机、磨床及医用机械中 第七章挠性传动
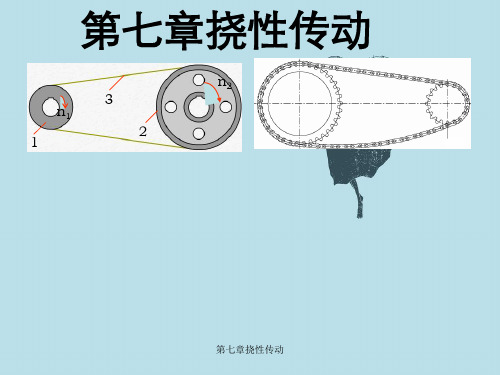
根据挠性元件不同可分为和链传动两类。
根据挠性元 件不同分为
带传动 链传动
特点:与齿轮传动相比较,它们具有结构简单、成本低廉, 两轴距离大等优点,因此,挠性传动也是常用的传动形式
第七章挠性传动
第一节 带传动的类型和工作情况分析
带传动的组成:由主动带轮、 从动带轮和紧套在两轮上的传 动带组成
摩擦带传动 根据工作原 理不同分为 啮合带传动
影响带的最大有效拉力的因素:
(1)初拉力F0 增大初拉力,正压力增大,所能产生的摩擦力增大,传递的最大有效拉力拉力
挠性传动设计上PPT课件
2)使从动轮的圆周速度v2低于主动轮的圆周速 度v1,即: v2< v1 。
从动轮圆周速度相对降低量称为滑动率ε。
滑动率ε: v1 v2 100 % v1
F↑则ε↑,正常工 作时, ε=1% ~ 2%
3) 传动比不为常数即:
i n1 n2
d2
d11
≠常数
二)带传动打滑
打滑——当传递的有效拉力达到极限值Fflim时,过载引起
0.30 0.33
80
0.22 0.26 0.30 0.35
0.35 0.39
75
0.45 0.51 0.60
0.68 0.73
90
0.68 0.77 0.93
1.07 1.15
AA
110000 0.83 0.95 1.14
1.31 1.32 1.42
112
1.00 1.15 1.39
1.61 1.74
打滑
是带传动的失效形式,设计时必须避免; 发生在带和带轮的全部接触弧上。
B αβ11
n1
A
C
n2
α2
β2
D
弹性滑动
B n1
βα1 1
A
C
α2
β2
D
打滑
三. 带传动的失效形式和计算准则
一)带传动 的失效形式
1)过载打滑——由F实传>Flim引起的失效
2)疲劳破坏(脱层和疲劳断裂)—σmax >[σ] 引 起失效
B
C
0.85
0.87
0.82
0.89
0.84
0.91
0.86
m/s v≦
∆P1kW
0.01
0.02
0.03
挠性传动轴的原理及应用
挠性传动轴的原理及应用1. 引言挠性传动轴作为一种重要的动力传动元件,在机械传动系统中具有广泛的应用。
它通过连接两个旋转装置,使其能够在斜角、非对齐或变轴心的情况下传递动力。
本文将介绍挠性传动轴的原理、结构特点以及在工业领域中的应用。
2. 挠性传动轴的原理挠性传动轴的工作原理基于弹性材料的变形能力。
当两个装置之间存在非对齐、斜角或变轴心时,传统的固定轴将会受到严重的偏斜力和变形,并且容易损坏。
而挠性传动轴采用了一种弹性材料作为连接杆,可以在一定范围内弯曲和扭转,从而能够有效地缓解由于装置之间的不对齐带来的压力和变形。
3. 挠性传动轴的结构特点挠性传动轴的结构主要由弹性材料和轴承组成。
弹性材料通常采用高强度合金钢或铝合金,具有较高的耐磨性和耐疲劳性。
轴承通常采用润滑油脂,能够减少摩擦和磨损,提高传动效率。
挠性传动轴还具有可调节性,可以调整轴承位置和角度,以适应不同的工作条件和装置之间的偏移。
4. 挠性传动轴的应用挠性传动轴在工业领域有着广泛的应用,下面列举了几个主要的应用领域:4.1 机械加工在机械加工中,挠性传动轴可以用于连接主轴和电机,传递动力。
由于机床运行时经常需要进行角度和位置调整,传统的刚性连接往往难以实现,而挠性传动轴可以有效地弥补这一缺陷。
4.2 船舶工业在船舶工业中,挠性传动轴被广泛应用于动力传递。
船舶在海上运行中经常受到波浪和风浪的影响,船体会产生较大的摇晃和变形,而挠性传动轴可以允许一定的弯曲和扭转,保证传动的稳定性和可靠性。
4.3 汽车工业在汽车工业中,挠性传动轴常常被用于连接发动机和驱动轴。
随着汽车发动机的高速化和大功率化,发动机的振动和扭矩也越来越大,传统的刚性连接会因为受力过大而损坏,而挠性传动轴可以有效地缓解这种压力,提高传动效率和可靠性。
4.4 风力发电在风力发电领域,挠性传动轴被广泛应用于风力发电机组。
由于风力发电机组需要能够根据风向和风速自由转动,而传统的刚性连接方式无法满足这种需求,挠性传动轴能够实现灵活的角度调整,使风力发电机组能够更好地利用风能。
机械设计基础第八章挠性传动讲解

n2 3 n1
2 1
精品资料
一、传动 (chuándòng)概述
机器 动力机 (jī qì):
传动装置
工作机
将原动机部分输出的运动和动力传递给工作机的中间环 节,称为传动部分,简称传动 .
精品资料
电传动 (chuán dòng)
采用电力设备、电气元件,利用调整 其电参数来传递运动和动力
离开主动轮的一边被放松,拉力由F0减少到F2,称为松边。
进入主动轮的一边被拉紧,拉力由F0增大到F1,称为紧边;
精品资料
(2)取主动轮一端带为分离体
ΣFf
ΣMO1=0
d d d F f 2 d 1 F 2 2 d 1 F 1 2 d 1 0
ΣFf=F1-F2
(3)取主动轮为分离体
ΣFf
ΣMO1=0
结构紧凑,轴上压力小;
传动不平稳;
传动效率高η=98%;
传动时有噪音、冲击;
承载能力高P=100KW;
对安装精度要求较高。
可传递远距离传动amax=8m;
成本低。
应用:适于两轴相距较远,工作条件恶劣,中低速传动:传动 比≤8,P≤100KW,V≤12-15m/s,如农业机械、建筑机械、石 油机械、采矿、起重、金属切削机床、摩托车、自行车等。
带速≤30m/s时 ——灰铸铁HT150、HT200,常用。 高速或特别重要场合——铸钢、钢板冲压后焊接。
小功率——铸铝、塑料。
2.基准直径dd:V带装在带轮上后,与节宽对应的带轮直径。
带轮基准直径dd已系列化 小带轮基准直径dd不能太小, ≥ dd1 ddmin
精品资料
3.V带轮的结构(jiégòu)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
v
F1
由F = F1 – F2,得:
F2 = F0 -F/2
Fv P 1000
kW v 为带速
P 增大时, 所需的F (即Ff )加大。但Ff 不可能无限增大。 当要求的圆周力大于最大摩擦力时,带传动将出现打滑
机械设计
第二章挠性传动-受力及运动分析
当Ff 达到极限值Fflim 时,带传动处于即将打滑的临界状态, 此时, F1 达到最大,而F2 达到最小。
注意:
机械设计
第二章挠性传动-受力及运动分析
带横截面的应力为三部分应力之和。 各剖面的应力分布为:
最大应力发生在 紧边开始进入小带轮处:
max 1 c b1
§2-2 带传动的受力分析及运动分析 一、受力分析
第二章 挠性传动-带传动
安装时,带必须以一定的初拉力F0 张紧在带轮上 F0 此时,带只受 初拉力F0作用 Ff -带轮作用 于带的摩擦力 F2
带工作前:
F0
松边-退出主动轮的一边
带工作后:
紧边在下 松边在上
F2 n1 F1
Ff
n2
Ff
由于摩擦力的作用: 紧边拉力 -由 F0 增加到 F1; 松边拉力 -由 F0 减小到 F2 。
机械设计
第二章 挠性传动设计
概 述
§2-1
一、挠性传动的类型 挠性传动 — 具有中间挠性构件的传动方式。 包括:带传动、链传动和绳传动 工作原理 — 摩擦传动: V带、平带、多楔带、圆带等
啮合传动: 同步带、链传动等
选型 设计
本章主要讨论普通 V 带传动的设计,简单介绍链传动 普通V带是标准件,七种型号:Y、Z、A、B、C、D、E
★ 欧拉(Euler)公式
带传动即将打滑时,可推出古典的柔韧体摩擦欧拉公式: f 为摩擦系数;α为带轮包角 F f
F2
那么:
e
欧拉公式反映了带传动丧失工作能力之前, 紧边、松边拉力的最大比值
F flim= F1 – F2 = F1- F1 /e fα = F1(1-1/e fα) Fflim - 此时为不打滑时的最大有效拉力, 正常工作时,应使有效拉力 F < Fflim
紧边-进入主动轮的一边
机械设计
第二章挠性传动-受力及运动分析
F = Ff = F1 – F2
F - 有效拉力,即圆周力
F2 Ff
带是弹性体,工作后可认为其总长度不变,则: 紧边拉伸增量 = 松边拉伸减量 紧边拉力增量 = 松边拉力减量 = △F 因此: F1 = F0 +△F F2 = F0 -△F F1 = F0 +F/2 F0 =(F1 +F2) / 2 带所传递的功率为:
微单元弧对 应的圆心角
dC
dα
r n1 FC
v2 qv2d ( rd )q 带轮半径 r
截取微单元弧段dl 研究,其两端拉力FC 为离心力引起的拉力。 由水平方向力的平衡条件可知:
d dC 2 FC sin FCd 2
d d sin 2 2
机械设计
∴
qv2d FCd
包角α :
α↑ →F ↑ , 带所能传递的圆周力增加,传动
能力增强,故应保证小带轮的包角α1足够大。
这一要求限制了最大传动比 i 和最小中心距 a 。 因为: i↑ →α1 ↓ ; a↓ →α1 ↓ 摩擦系数 f : f↑ →F ↑ , 传动能力增加 对于V带传动,应采用当量摩擦系数 fv 计算
机械设计
相同条件下,V带的摩擦力大于平带,传动能力更强
机械设计
第二章 挠性传动-概述
三、带传动的几何尺寸
V带的基准长度 Ld : 在节线层上量得的带周长
V带轮的基准直径 dd : 与节线相对应的带轮直径 带传动几何尺寸 :
节线
α1- 小带轮包角 α2- 大带轮包角
α1< α2
a - 带传动中心距
机械设计
机械设计
二、普通V带与平带摩擦力之比较
第二章 挠性传动-概述
平面摩擦
楔形面摩擦
2 N sin( / 2) FN
平带的摩擦力为: V带的摩擦力为:
F f f N f FN
f — 摩擦系数
fFN F f 2 fN f v FN si n / 2
f v — 当量摩擦系数,显然 f v > f
第二章挠性传动-受力及运动分析
2 即: FC qv
N
则离心拉力 FC 产生的拉应力为: FC qv2 C MPa A A 虽然离心力只作用在做圆周运动的部分弧段, 但其产生的离心拉力FC(或拉应力σc)却作用于 带的全部,且各剖面处处相等。 节线至带最 带的弹性 与离心拉应力σc不 外层的距离 模量 同,弯曲应力σb只 3、带弯曲而产生的弯曲应力 σb 带绕过大带轮 带绕过小带轮 时的弯曲应力 时的弯曲应力 作用在绕过带轮的 带绕过带轮时发生弯曲,由材力公式: 那一部分带上 。 2 yE b MPa 显然:dd↓ →σb ↑ dd σb1 > σb2 故:
将F1 = F0 +F/2代入上式:F f lim
1 1 ( F0 F f lim ) 1 f 2 e
机械设计
整理后得:F f lim 2 F0
e 1 e f 1
f
第二章挠性传动-受力及运动分析
影响最大有效拉力F 的几个因素:
初拉力F0 : F 与F0 成正比,增大F0有利于提高带的传动 能力,避免打滑。 但F0 过大,将使带发热和磨损加剧,从而缩 短带的寿命。
当包角α =180°时:
第二章挠性传动-受力及运动分析
V带 —
F1 e f v 5 F2
平带 —
F1 e f 3 F2
由此可见:相同条件下, V 带的传动能力强于平带
二、带传动的应力分析 工作时,带横截面上的应力由三部分组成: 由紧边和松边拉力F1 、F2 产生的拉应力; 由离心力产生的拉应力; 由弯曲产生的弯曲应力。 1、拉力F1、F2 产生的拉应力σ1 、σ2 紧边拉应力:σ1 = F 1/A 松边拉应力:σ2 = F2 /A MPa MPa
A -带的横截面面积
机械设计
第二章挠性传动-受力及运动分析
2、离心力产生的拉应力σc 带绕过带轮做圆周运动时会 产生离心力。 带单位长度质 微单元弧 dl
带速(m/s) 量(kg/m ) 的质量 设: 作用在微单元弧段 dl 的离
FC v
心力为dC v2 v2 则 dC dm dl q r r