第十一章 机械的平衡
江苏省 苏科版 初三物理 下学期 第十一章 简单机械和功 汇编之杠杆平衡实验(有答案) (1)
第十一章简单机械和功汇编之杠杆平衡实验1.在探究杠杆平衡条件的实验中:(1)实验前小明发现杠杆右端低左端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向______调节。
(2)如图甲所示,调节平衡后,小明在杠杆上A点处挂3个钩码,在B点处挂2个钩码杠杆恰好在原位置平衡。
于是小明便得出了杠杆的平衡条件为:动力×动力臂=阻力×阻力臂,同组的小华却认为是:动力+动力臂=阻力+阻力臂。
他们这样得出的结论______(都合理/小明合理/小华合理/都不合理)。
理由是:______。
(3)小明又用如图乙所示装置进行实验,弹簧测力计的读数应是______N(一个钩码重0.5N)。
若将弹簧测力计沿顺时针缓慢旋转至竖直方向,则其示数______(变大/变小/不变)。
2.小王利用杠杆进行探究“杠杆的平衡条件”的实验。
(每个钩码重0N)(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向______(选填“左”或“右”)端调节,直到杠杆在水平位置平衡;(2)如图甲所示,①在杠杆A点处挂2个钩码,则在B点处应挂______个同样的钩码,杠杆仍然在水平位置平衡,实验中使杠杆平衡在水平位置的目的是______。
②把B点处的钩码取下,弹簧测力计在B点处施加一个竖直向下的拉力F,杠杆仍在水平位置平衡。
当拉力F向右倾斜时,仍要保持杠杆水平平衡,拉力F的大小将______(选填“变大”、“变小”或“不变”),原因是______。
(3)小王对器材进行了改装,又做了如图乙所示的探究,用弹簧测力计在C点竖直向上拉,使杠杆仍然处于水平位置平衡,实验中发现弹簧测力计的示数为3.5N,数据不符合杠杆平衡条件,原因是______。
3.小明在探究“杠杆的平衡条件”实验中,(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆左端下沉,则应将平衡螺母向______ (选填“左”或“右”)调节,使杠杆在水平位置平衡调节杠杆在水平位置平衡,这样做的好处是______ ;(2)杠杆平衡后,小明在图甲所示的A位置挂上两个钩码,可在B位置挂上______ 个钩码,使杠杆在水平位置平衡.(3)如果再在A、B两处各加挂一个钩码,杠杆的______ 端将会下沉.此后,小红又经过多次实验,得出的杠杆的平衡条件是______ .(4)他改用弹簧测力计在图乙所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将______ (选填“大于”、“等于”或“小于”)1N.4.在“探究杠杆平衡条件”的实验中:(1)小华同学先把杠杆的中点支在支架上,杠杆静止在如图甲的位置,此时杠杆处于______(选填“平衡”或“不平衡”)状态。
苏科版九上物理第十一章 简单机械和功第一节《杠杆》第二课时授课课件

谢谢
杠杆
杠杆的 分类与运用
省力杠杆:动力臂大于阻力臂,省力 等臂杠杆:动力臂等于阻力臂 费力杠杆:动力臂小于阻力臂,费力
课前导入 学习目标 新知探究 本课小结 随随堂堂练练习习
随堂练习
1、两小孩坐在跷跷板上恰好水平平衡,此时( B.两小孩到支点的距离一定相等 C.两小孩的力臂一定相等 D.小孩的重力与各自到支点的距离的乘积相等
) A.两小孩的重力一定相等 D
2、下列关于杠杆的说法中,正确的是( )
C
A.支点总位于动力作用点与阻力作用点之间
B.动力臂越长,总是越省力
C.动力臂与阻力臂的比值越大,就越省力
D.动力作用方向总是与阻力作用方向相反
课前导入 学习目标 新知探究 本课小结 随随堂堂练练习习
随堂练习
2、假期中,小兰和爸爸、妈妈一起参加了一个家庭游戏活动。活动要求是:家庭成员中的 任意两名成员分别站在如图所示的木板上,恰好使木板水平平衡。若小兰和爸爸体重分别为 400 N和800 N,小兰站在距离中央支点2 m的一侧,爸爸应站在距离支点多远处才能使木板 水平平衡?
课前导入 学学习习目目标标 新知探究 本课小结 随堂练习
学习目标 (1)掌握杠杆的平衡条件; (2)理解杠杆的分类和应用。
课前导入 学习目标 新新知知探探究究 本课小结 随堂练习
一、杠杆的平衡条件 什么情况下才说明杠杆平衡了?
跷跷板此时静止
使用筷子夹取食物停留的片刻
杠杆静止或匀速转动,我们就说此时杠杆处于平衡状态。
现代版曹冲称象
L2 O
F1
L1
F2
二、生活中的杠杆
课前导入 学习目标 新新知知探探究究 本课小结 随堂练习
P6 例题
第11章 机械系统动力学
l ——外力矩M L作用构件的角速度;
u xp、u yp、ul ——相应类速度。
3. 动力学方程
在不考虑系统势能变化的情况下(对于刚体机械系统,一般情 况下,构件重量产生的势能 构件动能,可以略去),将 E 1 J e1q12微分,得 2 E J e1q1 q
E 1 2 dJ e1 q1 q1 2 d q1
凯思方程:
是将主动力和惯性力都转化到广义坐标中,它们在广义
坐标中也同样应用达朗贝尔原理,表达式为:
( r ) M *(r ) FP Fm 0
P P 1 m 1
M个惯性力对第r个广义坐标的广义惯性力之和
P个主动力对第r个广义坐标的广义力之和
11-2 刚性机械系统动力学
系统的简化:
1. 系统的动能: 设系统有m个活动构件,则系统的总动能E:
1 m 2 2 E mi xsi ysi J sii2 2 i 1
“.”表示对时间的导数
由于xsi、ysi、i 都是广义坐标q1的函数,即 xsi xsi (q1 ) ysi ysi (q1 ) (q ) i 1 i 所以
H 13
(2)求等效转动惯量J e 根据动能等效原则,得:
1 1 2 2 2 J e12 J112 J 22 J H H m2vO2 2 2
2 2
2
vO2 2 H Je J 1 J2 J H m2 1 1 1 2 H 2 z3 2 H 由i23 1 3 2 3 H H z2 H 1 2 H 1 1 2 又 1 4
北湖区第三中学八年级物理下册 第十一章 机械与功 1 杠杆教案 教科版
1.杠杆【教学目标】1.知识与技能:(1)知道杠杆平衡的条件;(2)能根据实际需要正确选择和使用杠杆。
2.过程与方法:经历“探究杠杆平衡条件”的过程。
3.情感、态度与价值观:体验科学探究的乐趣,了解杠杆在生活中的应用。
【教学重难点】探究杠杆平衡条件。
【教学方法】实验探究法。
【教学过程】探究每2人一组实验,要求讨论如何设计这个实验。
讨论实验步骤。
步骤如下:(1) 将杠杆挂在铁架台上,观察是否在水平位置平衡( 静止 ) ;若不是,可调节平衡螺母,使之水平平衡。
此处可提问:为什么要使杠杆在水平位置平衡?若学生回答不出,可要求课后思考。
(2) 在杠杆支点的左边挂一定量的钩码,在支点右边也挂上钩码,直至杠杆平衡为止。
(3) 重复多做几次平衡实验,得到不同数据。
(4) 将数据记录下来,分析得出结论。
记录的是杠杆上的格数,如果不在水平位置平衡,那么臂长就不等于格数×格长了。
开始实验,完成探究任务。
老师在学生探究过程中进行巡视,发现问题及时提出,让学生自己去分析、解决问题。
完成实验后,任意选择五组,请组中作记录的学生将结果投影到屏幕上。
将五组中的实验数据任意各取一组填入表格中,讨论可得到什么结论 ( 杠杆平衡的条件 ) 。
教师可提出各种猜想,加减乘除关系都可。
可能有学生得到其他关系式,但不适合所有数据,因此它不是杠杆平衡条件。
学生分组认真探究,将结果填入自己设计好的表格中,同时对得到的结论进行分析、讨论。
对公式进行变形可以得到比例式,它的含义是:如果动力臂是阻力臂的几倍,那么动力就是阻力的几分之一。
学生:动力×动力臂 = 阻力×阻力臂。
【课堂练习】1.画出下图中F'和F"的力臂,并比较杠杆平衡时F'与F"的大小.2.下图所示杠杆,OA 长20cm,AB长60cm,现在A处挂一重200N的物体,若使B 处的弹簧秤示数最小,弹簧秤的方向怎样?弹簧秤的示数是多少?练习,理解。
三、杠杆的分类由杠杆的平衡关系,可以得到当力不等时,对应的力臂也不等。
机械原理之机械的平衡

3
y
α3r m2A
2
y m2 r2 α2 r3 x m 3 F3
x
r3 r1 m3A
α2 m 1A
r1
m1
a
3
x
x
L
xA = m1A r1 cos α1 + m2 A r2 cos α 2 + m3A r3 cos α 3
= 41.67 × 100 cos 0o + 40 × 80 cos 90o + 11.67 ×120 cos 225o gmm = 3176.77gmm
r1 = r4 = 100mm, r2 = 200mm, r3 = 150mm ,
而各偏心重量的方位如图所示。 又设平衡重力 G 的重心至回转轴距离 试求平衡重力 G 的大小及方位。
r=150mm,
x
90 Q1 Q4 r4 r3 90 Q3 90 r1
机械的平衡问题 可分为以下三个方面 1)刚性转子的平衡
*刚性转子--刚性转子--无显著地弹性变形的刚性转动构件
平衡原理--力系的平衡原理
2)挠性转子的平衡 2)挠性转子的平衡
挠性转子----在惯性力的影响下产生弯曲变形的转子
3)机械在机座上的平衡 3)机械在机座上的平衡
平面运动的构件的惯性力由机座平衡。 机构的平衡称为机械在机座上的平衡。 械
α1=0°; α2=270°; α3=180°; α4=90°; G1r1=5000Nmm; G2r2=14000Nmm; G3r3=12000Nmm; G4r4=10000Nmm;
90 Q2 r2
n Gb rb cos α b = −∑ Gi ii cos α i i =1 n Gb rb sin α b = −∑ Gi ri sin α i i =1
第十一章 简单机械和功--中考物理一轮复习章节分类考点讲解与训练(苏科版)- (原卷版)

第十一章 简单机械和功● 杠杆1.定义:在力的作用下可绕固定点转动的硬棒2.五要素:支点(O )、动力(F )、阻力(F 2)、动力臂(l 1)、阻力臂( l 2)3.杠杆的平衡条件:F 1l 1=F 2l 24.分类1) 省力杠杆:l 1 > l 2, F 1 < F 22) 费力杠杆:l 1 < l 2, F 1 > F 23) 等臂杠杆: l 1 = l 2, F 1 = F 2● 滑轮1.定滑轮1) 实质:等臂杠杆2) 特点:不省力,但能改变施力的方向,s =h2.动滑轮1) 实质:动力臂是阻力臂2倍的杠杆2) 特点:最多省一半力,但费距离,s =2h3.滑轮组1) 实质:由定滑轮和动滑轮组合而成的机械2) 特点:既可省力,又可改变力的方向,s =nh● 功1.定义:力与物体在力的方向上通过的距离的乘积2.两个必要条件:一是对物体要有力的作用;二是物体要在力的方向上通过一定的距离3.公式:W =Fs4.单位:焦耳,简称焦,符号是J ,1J=1N ·m● 功率1.定义:功与做功所用时间的比2.公式:P =W t 3.单位:瓦特,简称瓦,符号是W ,1W=1J/s4.单位换算: 1kW=103 W. 1MW=106W● 机械效率1.定义:物理学中,将有用功与总功的比值。
2.公式:η = W有用W总×100%3.提高机械效率的方法:减轻机械自重,减小机械摩擦,增大被提升物体重力1.(2021•泰州)如图,在均匀杠杆的A处挂3个钩码,B处挂2个钩码,杠杆恰好在水平位置平衡。
下列操作中,仍能使杠杆在水平位置平衡的是(所用钩码均相同)()A.两侧钩码同时向支点移动一格B.两侧钩码下方同时加挂一个钩码C.左侧加挂一个钩码,右侧加挂两个钩码D.左侧拿去一个钩码,右侧钩码向左移动一格2.(2021•淮安)在“探究杠杆平衡条件”实验中:(1)如图甲所示,应调节杠杆两端的,使杠杆在水平位置平衡。
机械的平衡

重要结论: 重要结论:
某一回转平面内的不平衡质 两个任选的回转平 量m,可以在两个任选的回转平 ,可以在两个任选 面内进行平衡。 面内进行平衡。
m1
m m2 mb I II F2
二、质量分布不在同一回转面内(动平衡) 质量分布不在同一回转面内(动平衡) 不在同一回转面内
1. 特点: 特点: 图示凸轮轴的偏心 ω 质量不在同一回转平面内, 质量不在同一回转平面内 , 但质 心在回转轴上, 任意静止位置 位置, 心在回转轴上 , 在 任意静止 位置 , 都处于平衡状态。 都处于平衡状态。 运动时有 时有: 运动时有:F1+F2 = 0 0 但惯性力偶矩: M = F1L= F2L≠0 惯性力偶矩:
L
m1I
m1 II
l1 = m1 L L − l1 = m1 L
m2I
m 2 II
l2 = m2 L L − l2 = m2 L
m3I m 3 II
l3 = m3 L L − l3 = m3 L 15
(4)在平衡基面上进行平衡 在平衡基面上进行平衡
I F2I m2I m1I m3I rbI mbI FbI F1I r1 m1 F 1 F2 m2 r2 r3 m3 F3 l1 L l2 l3
m3r3 mbrb
m1r1 m2r2
8
me = mbrb + m1r1 + m2r2+ m3r3 = 0
很显然,回转件平衡后: 很显然,回转件平衡后:
e=0
(
∵m= mb + ∑mi ≠0 )
回转件质量对轴线产生的静力矩: 回转件质量对轴线产生的静力矩:
mge = 0
该回转件在任意位置将保持静止: 该回转件在任意位置将保持静止: m1 所以称静平衡或单面平衡 所以称静平衡或单面平衡 如果平衡面内不允许安装平 如果任意两个 平衡面内进行平衡。 平衡面内进行平衡。
机械原理——机械的平衡
21
机械原理
§6-3 刚性转子的平衡试验 理论上的平衡转子,由于制造精度、装配、材质不均匀 等原因,会产生新的不平衡。只能借助于实验平衡。 平衡实验是用实验的方法来确定出转子的不平衡量的大 小和方位,利用增加或除去平衡质量的方法予以平衡。
一.静平衡实验
1.实验原理
22
机械原理
2.实验设备
滚轮式静平衡仪
9
机械原理
10
机械原理
例:如图,盘状转子偏心质量m1、m2, 回转半径r1、r2,如何实现静平衡?
解: F F F 0 Ii b
ω
2 2 2 m1 r 1 m r 22 r 2m b r b0 r b 0 b m 2m
26
机械原理
3.现场平衡
对于一些尺寸非常大或转速很高的转子,一般无法在专用动 平衡机上进行平衡。即使可以平衡,但由于装运、蠕变和工作温 度过高或电磁场的影响等原因,仍会发生微小变形而造成不平衡。 在这种情况下,一般可进行现场平衡。 现场平衡 就是通过直接测量机器中转子支架的振动,来确 定其不平衡量的大小及方位,进而确定应增加或减去的平衡质量 的大小及方位,使转子得以平衡。
G4000
G1600
G630
1600
630
……
G2.5 G1 G0.4
……
2.5 1 0.4
……………………………..
燃气轮机和汽轮机、透平压缩机、机床传动装置、 特殊中、大型电机转子、小型电机转子等。 磁带录音机传动装置、磨床传动装置、特殊要求 的小型电机转子。 精密磨床的主轴、砂轮盘及电机转子陀螺仪。
32
机械原理
1.利用配重 2
1 4
s
2021秋九年级物理全册第十一章简单机械和功1杠杆第2课时杠杆的应用习题课件新版苏科版
18. 如图甲所示是一个钥匙形“瓶起子”,图乙为其简化的示意图,图中O为支 点,F2是A点受到的阻力.请在图乙中画出:
(1)阻力臂l2. (2)作用在B点的最小动力F1及其力臂l1. 如图所示
19. (2020·泰州)如图乙所示,画出拉力F的力臂l和物体B所受重力G的示意图. 如图所示
20. (2020·盐城)小明做“探究杠杆平衡条件”实验. (1) 实 验 前 , 杠 杆 静 止 时 的 位 置 如 图 甲 所 示 , 要 使 杠 杆 在 水 平 位 置 平 衡 , 应 将 平 衡 螺 母 向 ____右____调节. (2)使用弹簧测力计时,首先进行的操作是___校__零___. (3)如图乙所示,在杠杆左侧挂2个钩码,每个钩码的质量为50 g.为了便于在杠杆上直接读出 力臂的大小.在A点沿___竖__直___向下方向拉动弹簧测力计,直至杠杆在___水__平___位置平衡,并 将第一次数据记录在表格中,表中F1大小为弹簧测力计示数,F2大小为钩码的重力,L1、L2分 别为F1、F2对应的力臂.
11. 如图所示,用撬棍撬起石头时,O为支点,A为动力作用点,要求: (1)画出石头所受重力的示意图. (2)画出最小动力F1的示意图和动力臂l1. 如图所示
12. (2020·安顺)撬棒是人们在劳动中应用杠杆原理的工具.如图所示是工人利用 撬棒撬动大石头的情景,撬棒上O点为杠杆的支点.下列分析正确的是( B ).
图,当人手托5 kg的物体保持平衡时(g取10 N/kg),肱二头肌收缩对桡骨所施加力
的大小,下列说法正确的是( B ).
A. 大于5 kg
B. 大于50 N
C. 小于50 N
D. 等于50 N
4. 如图所示,物体重G=50 N,OB=0.4 m,OA=1 m,使杠杆在水平位置平 衡时,F1的力臂l1=____0_.5___m,F1=____4_0___N.(忽略杠杆自重)
九年级物理上册 第十一章 简单机械和功易错题(Word版 含答案)
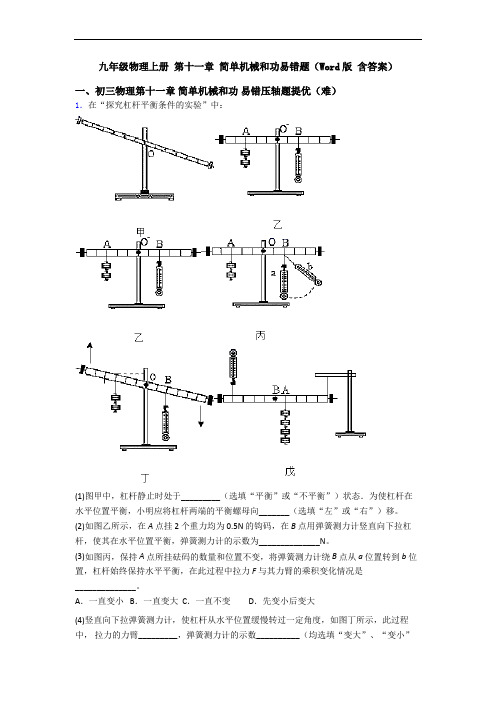
九年级物理上册第十一章简单机械和功易错题(Word版含答案)一、初三物理第十一章简单机械和功易错压轴题提优(难)1.在“探究杠杆平衡条件的实验”中:(1)图甲中,杠杆静止时处于_________(选填“平衡”或“不平衡”)状态.为使杠杆在水平位置平衡,小明应将杠杆两端的平衡螺母向_______(选填“左”或“右”)移。
(2)如图乙所示,在A 点挂 2 个重力均为 0.5N 的钩码,在B 点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为______________N。
(3)如图丙,保持A 点所挂砝码的数量和位置不变,将弹簧测力计绕B 点从a 位置转到b 位置,杠杆始终保持水平平衡,在此过程中拉力F 与其力臂的乘积变化情况是______________。
A.一直变小 B.一直变大 C.一直不变 D.先变小后变大(4)竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程中,拉力的力臂_________,弹簧测力计的示数__________(均选填“变大”、“变小”或“不变”)。
(5)若要使图丁状态下的弹簧测力计读数减小,可将弹簧测力计绕B 点 _____(选填“顺时针”或“逆时针”)方向转动一个小角度。
(6)小华用如图戊装置进行探究,发现总是无法得到教材上所列出的杠杆平衡条件,其原因是_____________________________________。
(7)小明用如图戊所示的实验装置研究“杠杆的机械效率”.实验时,将总重为G 的钩码挂在杠杆A 处,竖直向上匀速拉动弹簧测力计,钩码上升的高度为h,弹簧测力计的示数为F,其移动的距离为s,则杠杆的机械效率η=__________(用题中字母表示)。
若将钩码移动到B 点,仍将它匀速提升h 的高度,则此时弹簧测力计的示数F'________(选填“>”“=”或“<”)F,杠杆此时的机械效率η´___________η(选择“>”、“=”或“<”)。
机械原理考研讲义五(机械的平衡)
第六章机械的平衡机械平衡的目的是尽可能地消除或减小惯性力对机械的不良影响。
为达到此目的,通常需要做两方面的工作:首先,在机械的设计阶段,对所设计的机械在满足其工作要求的前提下,应在结构上保证其不平衡惯性力最小或为零,即进行平衡设计;其次,经过平衡设计后的机械,由于材质不均、加工及装配误差等因素的影响,生产出来的机械往往达不到设计要求,还会有不平衡现象,此时需要用试验的方法加以平衡,即进行平衡试验。
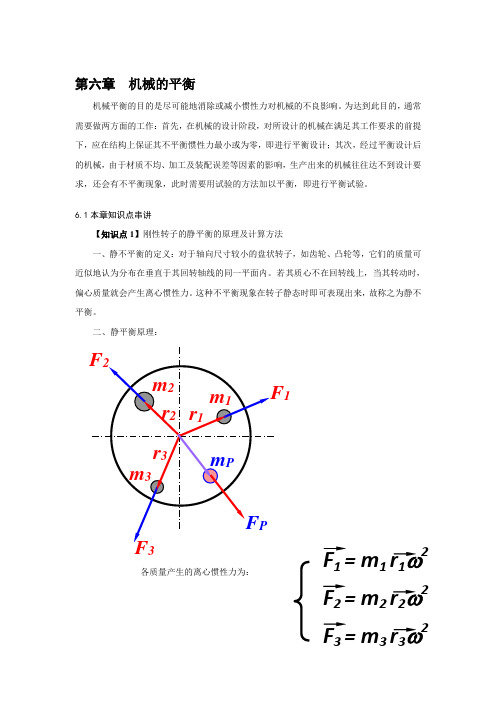
6.1本章知识点串讲【知识点1】刚性转子的静平衡的原理及计算方法一、静不平衡的定义:对于轴向尺寸较小的盘状转子,如齿轮、凸轮等,它们的质量可近似地认为分布在垂直于其回转轴线的同一平面内。
若其质心不在回转线上,当其转动时,偏心质量就会产生离心惯性力。
这种不平衡现象在转子静态时即可表现出来,故称之为静不平衡。
二、静平衡原理:各质量产生的离心惯性力为:13F1 = m1 r1ω2F2 = m2 r2ω2F3 = m3 r3ω2若:F 1+F 2 +F3 ≠ 0——表明此回转体为非平衡回转体。
人为增加一个质量点m P ,该质量点产生一个离心惯性力F P ,F 1+F 2 +F3+F P = 0称对此回转体进行了平衡。
结论:若欲使回转体处于平衡,则各质量点的质径积(或重径积)的矢量和为零。
三、求解方法主要有矢量图解法和坐标轴投影法。
A.矢量图解法其中W i = m i r i ,称为质径积。
用矢量图解法进行求解时,一定要选取合适的比例尺,作图要尽量准确。
平衡条件为:m 1 r 1 + m 2 r 2 + m 3 r 3 + m P r P =0 B.坐标轴投影法【知识点2】刚性转子的动平衡的原理及计算方法一、动不平衡的定义:对于轴向尺寸较大的转子,如内燃机曲轴和机床主轴等,其偏心质量分布在不同的回转平面内。
在这种情况下,即使转子的质心在回转轴线上,由于各偏心质量所产生的离心惯性力不在同一回转平面内,因而将形成惯性力偶,所以仍然是不平衡的。
高二物理第十一章 机械振动 第1~3节人教实验版知识精讲

高二物理第十一章机械振动第1~3节人教实验版【本讲教育信息】一. 教学内容:选修3-4第十一章机械振动第一节简谐运动第二节简谐运动的描述第三节简谐运动的回复力和能量二. 重点、难点解析:1. 知道什么是弹簧振子,理解振动的平衡位置和位移。
2. 知道弹簧振子的位移-时间图象,知道简谐运动与其图象。
3. 知道振幅、周期和频率的概念,知道全振动的含义。
4. 了解初相和相位差的概念,理解相位的物理意义。
5. 了解简谐运动位移方程中各量的物理意义,能依据振动方程描绘振动图象。
6. 理解简谐运动的运动规律,掌握在一次全振动过程中位移、回复力、加速度、速度变化的规律。
7. 掌握简谐运动回复力的特征。
8. 对水平的弹簧振子,能定量地说明弹性势能与动能的转化。
三. 知识内容:第一局部〔一〕弹簧振子1. 平衡位置:物体振动时的中心位置,振动物体未开始振动时相对于参考系静止的位置。
2. 机械振动:物体在平衡位置附近所做的往复运动,叫做机械振动,通常简称为振动。
3. 振动特点:振动是一种往复运动,具有周期性和往复性。
4. 弹簧振子:小球和弹簧所组成的系统,是一个理想化的模型,它忽略了球与杆之间的摩擦,忽略弹簧质量,将小球看成质点。
〔二〕弹簧振子的位移-时间图象1. 图像的意义:反映了振动物体相对平衡位置的位移随时间变化的规律。
2. 振动位移:振子的位移总是相对于平衡位置而言的,即初位置是平衡位置,末位置是振子所在的位置。
因而振子对平衡位置的位移方向始终背离平衡位置。
〔三〕简谐运动与其图象1. 简谐运动:质点的位移随时间按正弦规律变化的振动,叫做简谐运动。
简谐运动的位移-时间图象为正弦曲线。
简谐运动是机械振动中最简单、最根本的的振动。
2. 简谐运动的位移、速度、加速度〔1〕位移:振动位移是指从平衡位置指向振子所在位置的位移,大小为平衡位置到振子所在位置的距离。
〔2〕速度:速度的正负表示振子运动方向与坐标轴的正方向一样或相反〔3〕加速度:水平弹簧振子的加速度是由弹簧弹力产生的,方向总是指向平衡位置。
苏科版九年级上册物理第十一章《简单机械和功》第1讲:杠杆

中考要求考试内容知识点分项细目考试目标了解理解简单机械杠杆1.杠杆√2.力臂的概念√3.杠杆平衡条件√4.运用杠杆平衡条件解决有关问题√知识框架知识点睛知识点1.杠杆的基本概念在日常生活中,我们经常会用到下面的工具,其实它们就是杠杆.1.定义:一根硬棒,在力的作用下绕着固定点转动,这根硬棒就是杠杆.说明:“硬棒”不一定是棒,在这里它泛指有一定长度的,在外力的作用下几乎不发生形变的一切物体.因此,实际杠杆的外形多种多样,可以是直的,可以是弯曲的,可以是方的,可以是圆的但不杠杆杠杆的基本概念杠杆平衡条件及应用杠杆杠杆平衡的实验管它的外形如何,作为杠杆时都具有共同的特点;①有一个固定点,在物体转动时,这点是静止不动的;②在力的作用下能绕固定点转动而几乎不发生形变;③受到动力和阻力作用.例如:剪刀、钳子、独轮车、铡刀以及滑轮等.2.杠杆的五要素:A .支点:杠杆绕着转动的固定点(常用O 表示)B .动力:使杠杆转动的力(常用1F 表示)C .阻力:阻碍杠杆转动的力(常用2F 表示)D .动力臂:从支点到动力作用线的距离(常用1L 表示)E .阻力臂:从支点到阻力作用线的距离(常用2L 表示)动力和阻力是从使杠杆转动和阻碍杠杆转动来定义的,具有相对性.如果两个力分别由人和物体施加的,我们通常选择人施加的力为动力,物体施加的力为阻力;如果二个力都由人(或物体)施加的,我们可以任意选择其中的一个力作为动力,则使杠杆旋转方向相反的另一个力就是阻力.注意:(1)动力和阻力都是指杠杆受到的力,而不是杠杆对其他物体施加的力;(2)力使杠杆转动的方向与力的方向和支点的位置都有关.3.力臂图的画法:A .明确支点,用O 表示B .通过力的作用点沿力的方向画一条直线(虚线)C .过支点O 作该力的作用线的垂线D .用两头带着箭头的线段标示出支点到力的作用线的垂线段,写上相应的字母1L (或2L )4.杠杆的分类A .省力杠杆:动力臂大于阻力臂,动力小于阻力.特点是省力费距离.(铡刀)B .费力杠杆:动力臂小于阻力臂,动力大于阻力.特点是省距离费力.(缝纫机踏脚板)C .等臂杠杆:动力臂等于阻力臂,动力大于阻力.特点是不省力也不费力,不省距离也不费距离.(托盘天平)例题精讲【例1】如图所示的四种用具中,属于费力杠杆的是()【例2】图中属费力杠杆的是()【例3】如图所示,一名同学在做俯卧撑,如果把人的躯干看作一个杠杆,这是一个________(填“省力”或“费力”)杠杆,该杠杆的支点是________(填图中字母).【例4】如图所示,赛艇的桨可看成一个杠杆.则赛艇的桨属于杠杆.(选填“省力”或“费力”)【例5】如图是指甲刀的结构图,关于指甲甲刀下面说法正确的是()A.指甲刀可以看成是一个省力杠杆和一个费力杠杆组成B.指甲刀可以看成是一个省力杠杆和两个费力杠杆组成C.指甲刀使用的越久,用它剪指甲就越省力D.用指甲刀剪指甲时,大段地往下剪比小段地往下剪省力【例6】在图所示中,画出图中力F的力臂并用字母L表示.课堂检测【课1】如图所示的四种工具中,属于省力杠杆的是()【课2】如图所示的四种用具中,正常使用时属于费力杠杆的是()【课3】(多选)奥运会皮划艇静水比赛比赛的过程中,当运动员用船浆向后划水,艇就向前运动.下列表述正确的是()A .运动员使用的船浆属于费力杠杆B .运动员使用这种船浆的好处是省力C .用船浆向后划水,艇就向前运动,说明物体间力的作用是相互的D .用船浆向后划水,艇就向前运动,说明力可以改变物体的运动状态【课4】(多选)自行车是人们常见的交通工具,从自行车的结构和使用来看,它应用了许多物理知识.下列说法中正确的是()A .车把相当于费力杠杆B .刹车系统应用了杠杆及摩擦的知识C .链条与其连接的两个齿轮组成了一个滑轮组D .轮胎制成花纹是为了增大摩擦【课5】如图所示,画出图中动力1F 的力臂,并用字母1L 表示.知识点睛知识点2.杠杆的平衡条件1.杆处于静止或匀速转动状态为杠杆平衡.2.为什么实验前要调节杠杆两端的螺母,使杠杆在水平位置平衡;实验时在杠杆两端的不同位置分别挂上个数不等的钩码位置,也要使杠杆在水平位置重新平衡?目的;①消除杠杆自重的影响,由于实际杠杆的支点不可能精确处在其重心位置,因而杠杆本身的重力会对其平衡产生影响;②使力臂和杠杆重合,直接从杠杆尺上读出力臂的长度、所以,我们要求杠杆处于水平位置平衡.3.平衡条件(即实验结论):1122F L F L =或2112F L F L =例题精讲【例1】如图所示,O 为杠杆的支点,第一次杠杆在重物G和力F 1的作用下处于水平位置平衡.如果第二次杠杆在重物G 和力F 2的作用下仍在图中位置保持平衡,下面关系中正确的是()A .F 1>F 2B .F 1=F 2C .F 1<F 2D .F 2>F 1>G【例2】如图所示,O 为杠杆的支点,在杠杆的右端B 点挂一重物.MN 是以A 为圆心的弧形导轨,绳的一端系在杠杆的A 点,另一端E 可以在弧形导轨上自由滑动.当绳的E 端从导轨的一端N 点向另一端M 点滑动的过程中,杠杆始终水平,绳AE 对杠杆拉力的变化情况()A .先变小,后变大B .先变大,后变小C .一直变小D .一直变大【例3】如图所示,质量分布均匀的长方形木板AB的长度L=4m,中央支于支架O上,A.B端分别用细绳AD.BC系于天花板上,木板AB水平时,绳AD.BC刚好绷直,且AD绳竖直,BC绳与板AB成30°角,已知细绳承受的最大拉力均为240N.现有重为300N的小孩,从O点出发,沿OB方向向B端缓慢行走,那么绳将被拉紧;在保证细绳不被拉断的情况下,小孩向右行走的最大距离是m;若从O向A端行走,则行走的最大距离是m.【例4】一根轻质杠杆OB,一端固定在O点,可以在竖直面内转动,装置如图所示.已知OA:OB=1:2,G=19.6N,当弹簧秤的读数为4.9N时,轻质杠杆刚好水平平衡,则A点所挂重物受的浮力为()A.14.7N B.9.8N C.4.9N D.2.45N【例5】如图是小华利用杠杆提升浸没在水中的物体B的示意图.杠杆CD可绕支点O在竖直平面内转动,OC:OD=1:2,物体A为配重,其质量为200g.烧杯的底面积为75cm3,物体B的质量为320g,它的体积为40cm3.当物体B浸没在水中时,水对杯底的压强为P1.当用力拉物体A,将物体B 提出水面一部分以后,杠杆恰好在水平位置平衡,此时,竖直向下拉物体A的力为F,水对杯底的压强为P2.若p1与p2之差为40Pa,求拉力F的大小.(g取10N/kg,杠杆的质量、悬挂物体A和物体B的细绳的质量均忽略不计)课堂检测【课1】如图所示,一根铁棒在水平拉力F 的作用下,以O 点为转轴,由竖直逆时针匀速转向水平位置的过程中,动力F 与动力臂L 的大小变化()A .F 增大,L 增大B .F 减小,L 减小C .F 增大,L 减小D .F 减小,L 增大【课2】小红所在的科技小组利用所学知识自制一杆秤(自重不计),其照片如图所示.秤砣的质量m 0为1kg ,根据照片估算此杆秤最大测量值为kg ;若要增大该杆秤的测量范围,可采用的方法(写一种方法);已知秤杆上0.5kg 和2.5kg 的两根刻度线相距10cm ,则秤钩连接点A 与提钮O 点的距离是cm.【课3】(多选)如图所示的杠杆平衡,把A 端所挂重物浸没在水中,杠杆失去平衡,为使杠杆重物的平衡,应当()A .将支点向A 端移动B .将支点向B 端移动C .支点不动,在B 端再加挂钩码D .支点不动,将B 端重物向支点移动【课4】如图所示,杠杆AB 的A 点挂边长为2dm 、密度为ρ1=2kg/dm 3的正方体C ,B 点挂边长为1dm 正方体D ,AO:OB=2:5,杠杆在水平位置平衡时,D 静止在空中,C 对水平地面的压强为p 1=1000Pa ;若将正方体D 浸没在某种液体中(未接触到容器底),杠杆在水平位置平衡时,C 对水平地面的压强增大了1250Pa ,取g=10N/kg ,可求得()A .物块D 的密度为5kg/dm 3B .液体的密度为2kg/dm 3O B A CDD .若物体D 不浸入液体,要使物体C 对地面的压强为零,则应对物体D 施加竖直向下的64N 的力知识点睛知识点3.杠杆平衡条件的实验关于杠杆衡条件的实验,是近年各地中考的热点,解决这类问题的一般步骤是:1.通览一下题干,明确所求2.明确杠杆支点的位置;3.分析杠杆受到的各个力分清动力和阻力,明确其大小和方向,确定每个力的力臂;据杠杆的平衡条件1122F L F L 列出关系式,求解即可.例题精讲【例1】在探究杠杆平衡条件的实验时,实验前发现杠杆左端低,右端高,为使杠杆在水平位置平衡,应将平衡螺母向(选填“左”或“右”)调节;实验时,在A 点悬挂两个总重为1N 的钩码,在B 点用弹簧测力计竖直向下拉(如图所示),使杠杆在水平位置再次平衡,则拉力应为N ,此时杠杆属于杠杆.【例2】在探究杠杆平衡条件的实验中,如果杠杆右侧高左侧低,则可将左侧的平衡螺母向调节,使其在水平位置平衡.如图所示,在支点左侧20cm 刻度处挂3个重均为0.5N 的钩码,在支点右侧15cm 刻度处用弹簧测力计拉杠杆,使其水平平衡.要使弹簧测力计示数最小,弹簧测力计的拉力应沿方向,此时读数为N .【例3】在探究杠杆平衡条件的实验中,先把杠杆架在支架上,通过调节平衡螺母,使杠杆在水平位置平衡.当左侧钩码处于如图所示的A 位置时,应将右侧的钩码向__________移动(选填“左”或“右”)________格(每格长度相同),可使杠杆在水平位置平衡.【例4】同学们在实验室进行“探究杠杆的平衡条件”的实验.所用杠杆上相邻刻线间距均为5cm ,实验中使用的钩码每个重0.5N .(1)实验前,小宏发现杠杆如图甲所示,左端偏高,右端偏低.他应将平衡螺母向调节,使杠杆水平平衡后再进行实验.实验序号动力1/N F 动力臂1/cm L 阻力2/N F 阻力臂2/cmL M 20 1.510(2)图乙是小宏某次实验的情景,请你把弹簧测力计的示数填入上表中.(3)本次实验数据不符合杠杆平衡条件,出现问题的原因是.【例5】如图,长3.0m 、重10N 且密度不均匀的金属杆,可绕O 点在竖直平面内自由转动.现用竖直向上的拉力F 使金属杆保持水平,测出O 点到拉力F 的距离及F 的大小,再改变拉力F 作用点的位置,测出相应的F 与x 的大小,所得实验数据如表.(1)由表中数据可得F 与x 之间的关系是:.(2)O 点到金属杆重心的距离为m .(3)若测力计量程为25N ,则应控制在范围.课堂检测【课1】下图是探究杠杆平衡条件的实验装置.(1)实验前,发现杠杆右端下沉,此时,应把杠杆两端的平衡螺母向______________(选填“左”或“右”)调节,使杠杆在_____________位置平衡,这样做的目的是为了方便读出力臂.(2)下表是某实验小组测得的两组数据,请你帮他们补充完整(3)分析上表,可得杠杆的平衡条件为:____________________________.【课2】在探究杠杆平衡条件的实验中:(1)小明发现杠杆右端低左端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向______调节.小明调节杠杆在水平位置平衡的主要目的是_________________________________、____________________________________.(2)如图甲所示,在杠杆左边A处挂四个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样钩码______个.(3)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将______________(变大/变小/不变),其原因是__________________________.【课3】在研究杠杆平衡条件的实验中:(1)实验前,发现杠杆处于如图所示的状态,为了使杠杆在水平位置平衡,应将杠杆右端的平衡螺母向_____(选填“右”或“左”)移动.(2)上面操作使杠杆在水平位置平衡,这样做的目的是______________(3)某实验小组进行正确的实验操作后,得到的数据为15NF=,120cmL=,24NF=和230cmL=.该实验小组是否根据这组数据就能得出探究结论?___________;理由是__________________.【课4】在探究“杠杆平衡条件”的实验中,杠杆上每格等距:(1)实验前没挂钩码时,发现杠杆左端上翘,应将左端平衡螺母向旋一些(选填“左”,“右”),使杠杆在位置平衡.(2)试验中,用图所示的方式悬挂钩码,杠杆也能平衡,但采用这种方式是不妥当的.这主要是因为()A.一个人无法独立操作B.需要使用太多的钩码C.力臂与杠杆不重合D.力和力臂数目过多(3)在图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍然可以平衡.总结复习知识点1.杠杆的基本概念知识点2.杠杆的平衡条件知识点3.杠杆平衡条件的实验课后作业【作业1】根据具体工作需要能选择合适的工具是劳动者的基本技能,要剪开较硬的物体,下图中的四种剪刀,应选择()【作业2】如图所示,下列器件中属于省力杠杆的是()【作业3】在建筑工地上,王师傅想用撬棒将一块大石头挪开.其实撬棒就是一个杠杆,其支点(O )和受力情况如图所示,请你在图中画出动力1F 的力臂1L .根据王师傅使用撬棒的情况,可知此时撬棒是一个杠杆.(选填“省力”、“费力”、“等臂”)【作业4】如图所示,杠杆AB 可绕O 转动,绳AD 连在以A 为圆心的弧形导轨MN 上,D 可在MN 上自由滑动,当绳的D 端从N 向M 滑动过程中,杠杆仍保持平衡,则AD 对杠杆的拉力变化情况是.【作业5】学习了杠杆原理后,小华和小明同学尝试利用杠杆原理测量出一把直尺的质量.请你也参与到他们的活动中吧.(1)写出杠杆平衡原理的表达式.(2)实验步骤:①找出直尺的重心.如图所示,他们将刀口仰放在桌面上,再把直尺平放在刀口(支点)上,左右移动直尺,使直尺在位置保持静止,此时的位置就是直尺的重心.他们在重心处做好记号.②将质量是m 千克的钩码挂在刀口左端的直尺上任一位置,在刀口上向右移动直尺,使其重新在位置平衡,读出此时钩码到刀口的距离,此距离就是动力臂L 1,则到刀口的距离就视为阻力臂L 2.③利用上述已知的和测量的量可写出计算直尺质量的表达式为.【作业6】如图所示,杠杆AB 可绕O 点在竖直面内转动,:2:5AO OB =.杠杆左端悬挂金属块A ,右端悬挂质量为2kg 的金属块B .金属块的密度5×103kg/m 3.当金属块B 没入水中时,杠杆恰在水平位置上平衡;当金属块B 没入酒精中时,需在金属块A 的下面施加竖直向下的N 的拉力,杠杆恰在水平位置上平衡.(330.810kg/m ρ=⨯酒精,g 取10N/kg ,不计杠杆重、绳重和摩擦.)中考演兵【演兵1】图4所示的用具中,属于省力杠杆的是【演兵2】如图4所示的四种用具中,属于费力杠杆的是【演兵3】图2所示的各种用具中,属于费力杠杆的是【演兵4】如图1所示,是生产或生活中经常使用的工具,属于费力杠杆的是图4ABCD筷子钳子天平钓鱼竿A 托盘天平B 镊子C 钢丝钳D 修剪树枝的剪刀图4天平钢丝钳钢丝钳羊角锤CB筷子AD图2瓶盖起子钳子镊子推独轮车ABCD图1瓶盖起子A镊子D钳子C核桃夹子B【演兵5】图4所示的用具中,属于省力杠杆的是【演兵6】图5所示的工具中,正常使用时属于费力杠杆的是【演兵7】图4所示的简单机械中,属于费力杠杆的是【演兵8】如图15所示,O 点为杠杆的支点,请画出力F 的力臂,并用字母L 表示。
第十一章 简单机械和功

第十一章简单机械和功知识梳理简单机械{杠杆类----杠杆、滑轮、轮轴;斜面类---斜面、劈、螺旋。
1.杠杆A. 概念a.杠杆的定义:一根硬棒在力的作用下能绕固定点转动,这根硬棒叫做杠杆.杠杆可以是直的,也可以是弯的.b .支点:杠杆绕着转动的点叫做支点,用O 表示.c .动力:使杠杆转动的力叫做动力,用F 1表示.d .阻力:阻碍杠杆转动的力叫做阻力,用F 2表示.动力和阻力是相对的,如利用杆秤称物体时,就无法确定哪个力为动力,哪个力为阻力,此时可以人为规定.e .力的作用线:过力的作用点沿力的方向所引的一条直线叫做力的作用线.力的作用线用虚线表示.f .动力臂:从支点到动力作用线的垂直距离,叫做动力臂.用L 1表示.g .阻力臂:从支点到阻力作用线的垂直距离,叫做阻力臂.用L 2表示.力臂可能在杠杆上,也可能不在杠杆上.当力的作用线通过支点时,该力的力臂为零,该力对杠杆的转动没有影响.B 作力臂的程序先找出支点,再作力的作用线,然后从支点作力的作用线的垂线.C 杠杆的平衡条件a.杠杆平衡:杠杆静止不转或者匀速转动都叫做杠杆平衡.b .力矩i .物理意义:力矩是度量力对物体产生转动效应的物理量.ii .定义:力和力臂的乘积叫做力对支点的力矩.力矩用字母M 表示,M=FL .iii.单位:牛〃米(N〃m)iV .分类:根据力的作用效果,分为顺时针力矩和逆时针力矩两种.C.杠杆平衡的条件(杠杆原理);动力乘以动力臂等于阻力乘以阻力臂,即:动力矩=阻力矩. 数学表达式:F l L 1=F 2L 2,即M 动=M 阻.说明:i .在使用公式时,公式等号两边相同物理量的单位要一致.ii .若动力矩和阻力矩不止一个时,杠杆的平衡条件可扩展为:顺时针的力矩之和等于逆时针的力矩之和.用公式表示为:∑M 顺=∑M 逆.D .杠杆的分类杠杆:等臂杠杆、不等臂杠杆(省力杠杆和费力杠杆)杠杆原理若用比例式表示,可以写成:1221l l F F上式表明,杠杆平衡时L 1是L 2的几倍,F l 就是F 2的几分之一.i.等臂杠杆(L1=L2,F l=F2)常见的有:定滑轮、天平的横梁等.ii.省力杠杆(L1>L2,F l<F2)常见的有:撬棒、铡刀、羊角锤、道钉撬、手推车、行李车、钢丝钳、核桃钳、铁匠剪刀、抽水机的柄、开瓶盖的起子等.利用省力杠杆可以省力,但要多移动距离.iii.费力杠杆(L1<L2,F l>F2)常见的有:铁锹、铲车、镊子、火钳、筷子、笤帚、船桨、钓鱼杆、汽车吊、理发剪刀、人的前臂、缝纫机的踏脚板等.利用费力杠杆虽然费力,但可以省距离.在日常生活中不少器具是由多种杠杆组合起来的,如指甲剪、垃圾桶等器具上既有省力杠杆,又有费力杠杆.E测量物体质量的工具i.天平天平的横梁是一根等臂杠杆.用天平称物体质量时,移动游码相当于向天平右盘中加小砝码,因此横梁平衡时m物=m砝+m 游.ii.杆秤、案秤、台秤和磅秤,它们都不是等臂杠杆,因此利用它们可以称量质量比秤砣(或槽码)的质量大得多的物体的质量.F.最小动力问题由F l L1=F2L2可得:122 1l lFF .上式表明,杠杆平衡时,若F2L2一定,则L2最大时,F l最小.据几何知识可知:i.若已知支点和动力作用点,则这两点之间的线段是最大的动力臂.ii.对于圆轮,若支点和动力作用点均在圆周上,则直径是最大的动力臂.有些较复杂的最小动力问题,还需利用数学上其他的一些极值知识来求解.2.滑轮和滑轮组A.滑轮周边有槽,能绕轴心转动的圆轮叫做滑轮.滑轮:定滑轮——工作时轴心不随重物一起移动的滑轮.动滑轮——工作时轴心随重物一起移动的滑轮.i.定滑轮定滑轮实质上是一个等臂杠杆.使用定滑轮不省力,但可以改变施力的方向.ii.动滑轮通常使用的动滑轮实质上是一个动力臂为阻力臂二倍的省力杠杆.使用动滑轮可以省一半力,但不能改变施力的方向.B滑轮组定滑轮和动滑轮的组合叫做滑轮组.使用滑轮组可以省力,可以省距离,可以改变施力的方向,但不可以同时既省力、又省距离. 滑轮组的省力情况,通常采用隔离法和整体法结合起来分析.即先将动滑轮和重物从整个系统中隔离出来作为一个整体,再全面分析该整体的受力情况,然后据力的平衡条件即可得出动力和阻力大小之间的关系.3.轮轴由轮和轴组成、能绕共同轴线旋转的简单机械,叫做轮轴.轮轴实质是可以连续旋转的杠杆.i .当动力作用在轮上,阻力作用在轴上时,使用轮轴省力,但要多移动距离.常见的有:辘轳、手摇卷扬机、汽车驾驶盘、自行车的龙头、拧螺丝的板手、拧螺丝钉的螺丝刀、自行车上的龙头和前叉、脚踏板和大齿轮组成的轮轴等.ii .当动力作用在轴上,阻力作用在轮上时,使用轮轴费力,但可少移动距离.如自行车上的飞轮和后轮组成的轮轴等.在现代工农业生产中,很多机械和机器是由多种简单机械组合起来的,如差动滑轮就是由轮轴和动滑轮组合起来的,起重机就是由杠杆和滑轮组组合起来的.4.机械功A.定义物理学中把力和物体在力的方向上移动距离的乘积叫做机械功,简称功.B .做功的两个必要因素作用在物体上的力和物体在力的方向上通过的距离.C 定义式和决定式W=Fs功是一个过程量.D .单位在国际单位制中,功的单位是焦耳,简称焦,符号为J .1 J=1 N〃mE 说明i .力与运动方向相反时,力对物体做负功.ii .力与运动方向不一致时,可利用力的分解和三角函数的知识计算功.iii .力的大小和方向在变化时,可采用分段处理(力变化的阶段取力的平均值)以及等效处理(根据是机械功原理、功能原理)等方法来计算功.5.功率A.物理意义功率是表示物体做功快慢的物理量.B.定义单位时间里完成的功叫做功率.C 定义式和决定式t WpD .单位在国际单位制中,功率的单位是瓦特,简称瓦,符号是W .1 W=1 J /s1 kW=103 W l MW=106 WE 推导式P=Fv式中的v 表示物体在力F 方向上移动的速度,若可为即时速度,则P 为即时功率;若v 为平均速度,则P 为平均功率.由P=Fv 得:F=P/v ,此式表明:当P 一定时,F 与v 成反比.F .配套功率动力机的功率要略大于工作机的功率.6.机械功原理(功的原理)A.文字表述利用任何机械做功时,动力对机械所做的功(W1),等于机械克服所有阻力所做的功(W2).即利用任何机械都不能省功.B .公式W 1=W 2C .斜面及斜面类简单机械斜面是一种常见的简单机械.设斜面长为L 、高为h 、物重为G ,使物体沿斜面匀速向上移动的动力为F ,若不考虑物体与斜面的摩擦,则在物体从斜面底端匀速移动到顶端的过程中,据功的原理W l =W 2有:FL=GhF=hG/L因为h<L ,所以F<G ,即利用斜面可以省力.对同样高的斜面,斜面越长越省力,但也要多移动距离.劈是斜面类简单机械.设人用水平力F 将劈推过距离s 时,物重为G 的物体被举高h .若不考虑摩擦和支架的自重,则据功的原理W 1=W 2有:Gh FS = G s hF =因为h<s ,所以F<G ,即利用劈可以省力.螺旋也是斜面类简单机械.利用螺旋举起重物时,若用h 表示螺纹的螺距,用L 表示螺旋把手的末端到螺旋轴线的长,用F 表示作用在把手末端的力,用G 表示物重,若不考虑摩擦,则在把手绕螺旋轴线匀速转动一周的过程中,据功的原理W l =W 2有:Gh l F =⋅π2 F hF π2=由于h 比2πL 小得多,所以F 就比G 小得多,即利用螺旋可以省力.7.机械效率A. 物理意义机械效率是表示机械做功性能优劣的物理量.B.定义使用机械做功时,有用功跟总功的比值,叫做机械效率.=动力对机械所做的功.W 有用=机械对物体的拉力所做的功.W 额外=机械克服自重、绳重和内部摩擦所做的功.据机械功原理:W 总= W 有用+ W 额外推导式:P 输入= P 输出+ P 额外C.定义式%100⨯=总有用W w η %100⨯=输入输出W w η D .推导式%100⨯=总有用p p η %100⨯=输入输出p p η 机械效率是一个过程量.E 说明i .机械效率是一个比值,没有单位.ii .任何机械的效率在实际情况下都小于1.iii .机械效率的高低,既跟机械本身结构(内部因素)有关,也跟被拉动的物体(外部因素)有关.F .推论i .利用同一滑轮组匀速提升重物时,若不计绳重和滑轮与轴之间的摩擦,则物动G G +=11η,η随G 物的增加而增大ii .当把各种机械组合起来使用时,若每个机械的效率分别为η1、η2、……ηn ,则整个装臵的效率η总=η1×η2×……×ηn ,组合机械越复杂,总效率就越低.典例剖析:1.图甲是一种用杠杆原理制成的供搬运重物上楼用的爬楼车,0、0'两处为轴连接.请你根据爬楼车的使用过程(图乙),分析说明爬楼车是费力杠杆还是省力杠杆.2.用如图甲所示的杠杆提升重物,设作用在A端的力F始终竖直向下,在将重物慢慢提升到一定高度的过程中,F的大小将( )A.保持不变B逐渐交小 C.逐渐交大D.先变大,后交小3.古代护城河上安装的吊桥可以看成一个以0为支点的杠杆,如图所示,一个人通过定滑轮用力将吊桥由图示位臵缓慢拉至竖直位臵,若用L表示绳对桥板的拉力F的力臂,则关于此过程中L的变化以及乘积FL的变化情况,下列说法正确的是( )A. L始终在增加,FL始终在增加B. L始终在增加,FL始终在减小C. L先增加后减小,FL始终在减小D. L先减小后增加,FL先减小后增加4.乒乓球、保龄球等表面都是光滑的,为什么高尔夫球的表面上布满小坑呢?经有关科学家研究发现:两个等大的球,一个表面布满小坑,另一个光滑,在空中高速飞行时,表面布满小坑的球受到的空气阻力较小.现将质量与体积均相等的两个小球A(表面布满小坑)与B(表面光滑)分别利用细绳悬挂在等臂杠杆的两端,使杠杆水平平衡,如图所示.当从两球正下方同时以相同速度(比较大)的风对准它们竖直向上吹时,则以下的说法中正确的是( )A. 杠杆左端下降B.杠杆右端下降C. 杠杆仍然在水平方向处于平衡状态D.无法判断杠杆的转动情况5.在一次校运动会上,小明骑一质量为辨的独轮车以速度可匀速通过一重为G、长为L的水平独木桥,独木桥的两端由两根竖直支柱A、B支撑着,如图所示.设独轮车骑上A端支柱处为初始时刻(t=o),下面哪一个图正确地表示了B端支柱所受力FB与时间t的函数关系(不考虑独木桥的形变) ( )6. 如图所示,质量分布均匀的细杆水平放臵,支座A 在杆重心的右侧,杆的右端被位于其上面的支座B 顶住.现在杆的左端C 处施加一个向下的作用力,则 ( )A. A 、B 两处的弹力均增加,且△F A =△F BB .A 、B 两处的弹力均增加,且△F A >△F B C. A 处的弹力减小,B 处的弹力增大,且lI △F A I>△F BD .A 处的弹力增大,B 处的弹力减小,且F A < I △F B l7. 如图所示,七块完全相同的砖块按照图示方式叠放起来,每块砖的长度均为L ,为保证砖块不倒下,6号砖块与7号砖块之间的最大距离s 将不超过 ( )L A 1531. L B 2. L C 25. L D 47.8. 某商店有一不等臂天平(砝码准确),一顾客要买2千克糖,营业员先在左盘放一包糖右盘加l 千克砝码;接着又在右盘放一包糖左盘加l 千克砝玛.然后把两包糖交给顾客,则两包糖的总质量A. 大于2千克B. 小于2千克C. 等于2千克 D .无法知道9. 如图所示,A 、B 为两个半径、材料都相同的,转向相反的轮子,它们的转轴互相平行且在同一水平面内,有一把均匀直尺C ,它的长度大于两轮子转轴距离的2倍,把该尺静止地搁在两转轮上,使尺的重心在两轮之间且离8轮较近,然后放手,考虑到轮子和尺存在摩擦,则直尺将 ( )A. 保持静止B. 向右运动,直至落下C. 开始时向左运动,以后就不断作左右来回运动D .开始时向右运动,以后就不断作左右来回运动10. 如图所示,水平地面上有甲、乙两辆平板车,人站在乙车上用50 N 的水平力拉甲车,如果甲车向右移动的距离是10 m ,同时乙车向左移动的距离是4 m ,人做的功是 ( )A. 700 JB. 500 JC. 300 J D .200 J11. 用滑轮组以不同速度匀速提升重物A ,作用在滑轮组绳子自由端的拉力均为F ,如图所示,不计绳重和摩擦.当拉力F 的功率为P 1时,重物A 以速度口l 匀速上升川听用的时间为t l ;当拉力F 的功率为P 2时,重物A 以速度υ2匀速上升h 所用的时间为t 2;当拉力F 的功率为P 1+P 2/2时,重物A 以速度υ3匀速上升h 所用的时间为 ( )212122.t t t t A + 212122.t t t t B + 2121.t t C + 2121.t t D + 12. 估测天平游码的质量.(1)观察并读出天平横梁标尺的最大刻度值为a(g).(2)测得天平横梁标尺上从0到a 刻度线之间的距离为b(mm).(3)测得天平左、右两臂的长均为c(mm).由以上数据,可估算出该游码的质量为 g .13. 如图甲所示是一均匀圆薄板,半径R=30cm. 现从圆板上挖出一个半径为r=15cm 的内切圆,试求剩余部分的重心与大圆圆心的距离.14. 如图所示,一根杠杆的长为L ,支点在O 处,A 端挂一物重为G 的物体.为保持杠杆在水平位臵平衡,现用一根定长为s 的绳子拉住(s<L).问:当绳子与水平方向的夹角θ为多大时,绳子上的拉力最小(杠杆的物重忽略不计)?15. 如图所示,实心物体M 是边长为l0cm 的正方体,杆AOB 可绕0点转动,AO=30cm ,BO=20cm ,当在杠杆的B 端加一恒力F=30 N 时,M 对地面的最小压强是290Pa(杆重不计,g 取10 N /kg).求:(1)物体M的密度. (2)若使杠杆的OB 部分在水平位臵平衡,则加在B 端的最小作用力是多大?16. 如图所示,质量扰=2.0kg 的小铁块静止于水平导轨AB 的A 端,导轨及支架ABCD 总质量M=4.0kg ,形状及尺寸已在图中注明,该支架只可以绕着过D 点的转动轴在图示竖直平面内转动.为简便起见,可将导轨及支架ABCD 所受的重力看作集中作用于图的0点.现用一沿导轨的拉力F 通过细线拉铁块,假定铁块起动后立即以0.1 m /s 的速度匀速运动,此时拉力F=10 N .(1)铁块运动时所受摩擦力多大?(2)铁块对导轨的摩擦力的力臂多大?(3)从铁块运动时起,导轨(及支架)能保持静止的最长时间是多少?(g 取10 N /kg)17. 某工地在冬季水利建设中设计了一个提起重物的机械,其中的一部分结构如图所示.0A 是一个均匀钢管,每米所受重力为30 N .O 是转动轴,重物的质量m 为150kg ,挂在B 处,0B=1 m. 拉力F 作用在A 点,竖直向上.为维持平衡,钢管OA 为多长时所用的拉力最小?这个最小拉力是多少?(g 取10 N /kg)18. 如图是一种电梯结构的示意图,电梯厢在电梯井中沿竖直通道上下运行.钢链的两端分别固定在电梯井顶部的A 点和B 点.同时钢链绕过重l5000 N 电梯厢下的滑轮而托起整个厢体E ,又跨过电梯井顶部由电动机驱动并带有齿轮的轮轴C ,在C 和B 之间吊起与动滑轮相连的配重D .电梯载重量为10人(1人的质量按60 kg 计算,g 取10N /kg,忽略摩擦及钢链的质量).请回答:(1)配重的功能是什么?在已知电梯厢重和载重量的情况下,配重的质量最好是多大?(2)当电梯满载匀速上升时,A 、B 两点受到的拉力各是多大?19. 如图所示,ABCD 是一个内部物质分布均匀的正方体木箱的截面示意图,将其臵于极粗糙的地面上,且木箱重G ,现用“翻滚”的方式使其向左移动s 距离,求:此过程中所需最小的功.20. 你思考过“人在水平路面上前进时是否要克服重力做功”这个问题吗?小文同学对此进行了研究.她通过查阅资料得知,人体的重心大约位于肚脐上方2寸、脊椎前1寸处,人只要走路,其重心就必然会发生上下位臵的变化,重心升高就需要克服重力做功.小文假设人在正常走路时,重心在人体中的位臵近似不变,她行走了100 m ,有关测量数据如下表(表中的步距是指跨出每一步两脚之间的距离):(1)小文同学注意到,当自己的前脚跨出时重心会下降,而后脚收起时重心会升高,则她每走一步,自己的重心会下降或升高多少米?(2)小文行走l00 m 需要克服重力多少功?克服重力做功的功率多大?(3)通过分析,你认为人在水平路面上通过走路来进行锻炼时,哪些因素影响人的锻炼效果?21. 随着城市建设进程的加快,绵阳城内出现了许多高层建筑,电梯是高层建筑的重要组成部分.某公寓的电梯某次在竖直向上运行的过程中,速度随时间变化的情况如图所示,忽略电梯受到的空气阻力和摩擦阻力,向上运行的动力只有竖直向上的电动机拉力,电梯箱和乘客的总质量为600 kg ,g 取10 N /kg .求:(1)电梯的匀速运动阶段上升的高度h 1是多少?拉力F l 做了多少功?(2)电梯的加速阶段的平均速度等于该阶段速度的最大值和最小值的平均值.已知在加速阶段,电动机的拉力F 2做了11520 J 的功,求加速阶段电动机拉力F 2的大小?(3)电梯开始向上运动后经过64 s ,电动机的拉力的平均功率是多大?22. 小明用如图所示的滑轮组,在10 S 内将质量为60 kg 的物体A 匀速提升了2m. 已知绳子自由端所用的拉力为200 N .(1)画出物体A 的重力示意图;(2)请计算出与此题相关的任意四个物理量(g 取10 N /kg).23. 某人在河岸上,借助岸边的大树,利用滑轮组通过拉绳使停泊在水中的船匀速靠岸.已知滑轮组是由一个定滑轮和两个动滑轮组成的(滑轮和拉绳自重不计),船的总质量为7.92×103 kg ,船匀速移动时受到水的阻力是船重的0.01倍,船受到滑轮组的拉力与人拉绳子的力始终水平,若人的拉力是220 N ,船靠岸的速度是0.3 m /s ,求:(g 取l0 N /kg)(1)滑轮组的机械效率.(2)人拉绳的功率.第22题24.某农村灌溉水渠上的闸门是用手动螺旋设备来起重升降的,如图所示.若闸门质量为800kg,螺杆上的螺距为l5㎜,动力手轮的直径为0.5 m,整个装臵的工作效率是80%,g取10 N/kg,并设闸门在缓慢上升过程中所受的摩擦阻力恒定.(1)人用双手转动轮,每只手平均用多大的力才能将闸门匀速提起.(2)若摩擦阻力主要是来自与两边卡槽之间的摩擦,其他摩擦不计,试求阀门上升过程中所受摩擦力的大小.25.液压电梯(如图)是一项新技术,它可以为十层以下的旧楼加设电梯而无需在楼顶增建悬挂轿箱用的机房.(g取10 N/kg)(1)有一种液压电梯,轿箱本身质量是300 kg,滑轮和柱塞的质量为200 kg,设计的最大承载质量为1 000 kg.若不计滑轮、滑轨和柱塞之间的摩擦,满载时整个装臵的机械效率为多少?(2)如果油泵最大油压是2.3×106 Pa,厂家所能提供的油压机柱塞直径为(单位:mm)85、105、140、184、238、256六种.通过计算说明应该选用哪种直径的柱塞.(由于摩擦和轿箱加速上升时需要较大的牵引力,厂家要求将柱塞直径扩大到计算值的1.4倍,然后从所给的六种规格中选取)26.小东想估测出某种油的密度阳,他手边的测量工具只有刻度尺.小东利用身边的器材设计出一个实验方案.首先找一根直硬棒,用细线系在0点吊起,硬棒在水平位臵平衡,然后将已知密度为ρ的金属块B挂在硬棒左端C处,另外找一个重物A挂在硬棒右端,调节重物A的位臵,使硬棒在水平位臵平衡,此时重物挂在硬棒上的位臵为E,如图所示.下面是小东测出ρ油的部分实验步骤,请你按照小东的实验思路,将实验步骤补充完整.(1)用刻度尺测出0E的长度L0.(2)把金属块B浸没在油中,把重物A从E处移动到D处时,硬棒再次在水平位臵平衡.(3) .(4)利用上述测量出的物理量和题中的已知量计算ρ油的表达式为.27.小华同学用有挂钩的塑料吸盘来“估测大气压的值”,他设计的实验方案是:将蘸水的吸盘按在平滑的玻璃板上,挤出里面的空气,按住玻璃板,用弹簧测力计钩着吸盘上的挂钩,缓慢往上拉,记录吸盘刚刚脱离玻璃板时弹簧测力计的读数,再测量出吸盘与玻璃板的接触面积,即可算出大气压的值,如图所示,实验室提供的器材是:量程为10 N的弹簧测力计l 只,底面积为3㎝2的吸盘,平滑玻璃板.实验时,他发现当弹簧测力计拉至读数最大时,吸盘仍未脱离玻璃板,实验室又没有量程更大的弹簧测力计,他认为可运用其他器材结合所学物理知识来解决这一问题.(1)请设计两种不同的实验方案,要求;先确定所需的器材(除量程为l0N的弹簧测力计l只、底面积为3㎝2的吸盘和平滑的玻璃板外),再简要说明你是如何运用物理知识解决这一问题的?(不增加弹簧测力计的个数)方案一:器材:;说明: .方案二:器材:;说明:。
机械原理第十一章 机械的平衡

当刚性转子的径宽比D / b 5时,通常只对转子进行静平衡试验。经平衡试验
所用的设备称为静平衡架。
O
如左图所示的是导轨式平衡架,
另外还有圆盘式静平衡架以及单摆
式静平衡架等类型。
S
O
Q
比较来说,导轨式结构简单, 平衡精度较高,但只适用于两端支 承轴尺寸相同的转子;圆盘式使用 方便,可以平衡两端尺寸不同的转 子,但平衡精度不如前者高。
11.1.2 机械平衡的方法
1. 平衡设计 在机构的设计阶段,除了要保证其满足工作要求及制造工艺之外,还要在结 构上采取措施消除或减少产生有害振动的不平衡惯性力,即进行平衡设计。
2. 平衡试验 经过平衡设计的机械,虽然从理论上已经达到平衡,但由于制造不精确、材 料不均匀及安装不准确等非设计原因,制造出来后达不到设计要求,还会有不平 衡现象。这种不平衡在设计阶段是无法确定和消除的,需要通过试验的方法加以 平衡。
变形不可忽略的转子称为挠性转子。 由于挠性转子在运转过程中会 产生较大的弯曲变形,且由此产生的离心惯性力也随之明显增大, 所以挠性转子平衡问题的难度将会大大增加。
2. 机构的平衡 对于存在有往复运动或平面复合运动构件的机构,其惯性力和惯性力矩不可 能在构件内部消除,但所有构件上的惯性力和惯性力矩可合成为一个通过机构质 心并作用于机架上的总惯性力和惯性力矩。因此,这类问题必须就整个机构加以 研究,应设法使其总惯性力和总惯性力矩在机架上得到完全或部分平衡,所以这 类平衡又称为机构在机架上的平衡。
mE1
l AB .mB re1
2. 对称布置法
mE3
lCD .mC re3
当机构本身要求多套机构同时工作时,可采用对称布置方式使惯性力得 到完全平衡,由于机构各构件的尺寸和质量完全对称,故在运动过程中其总 质心将保持不动。
机械的平衡
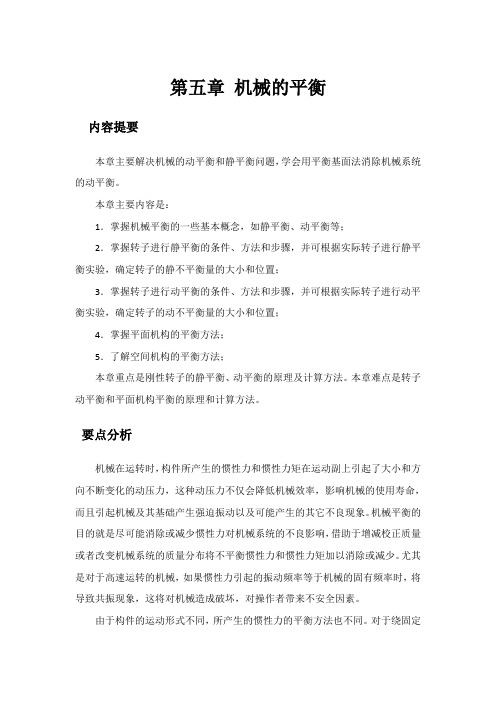
第五章机械的平衡内容提要本章主要解决机械的动平衡和静平衡问题,学会用平衡基面法消除机械系统的动平衡。
本章主要内容是:1.掌握机械平衡的一些基本概念,如静平衡、动平衡等;2.掌握转子进行静平衡的条件、方法和步骤,并可根据实际转子进行静平衡实验,确定转子的静不平衡量的大小和位置;3.掌握转子进行动平衡的条件、方法和步骤,并可根据实际转子进行动平衡实验,确定转子的动不平衡量的大小和位置;4.掌握平面机构的平衡方法;5.了解空间机构的平衡方法;本章重点是刚性转子的静平衡、动平衡的原理及计算方法。
本章难点是转子动平衡和平面机构平衡的原理和计算方法。
要点分析机械在运转时,构件所产生的惯性力和惯性力矩在运动副上引起了大小和方向不断变化的动压力,这种动压力不仅会降低机械效率,影响机械的使用寿命,而且引起机械及其基础产生强迫振动以及可能产生的其它不良现象。
机械平衡的目的就是尽可能消除或减少惯性力对机械系统的不良影响,借助于增减校正质量或者改变机械系统的质量分布将不平衡惯性力和惯性力矩加以消除或减少。
尤其是对于高速运转的机械,如果惯性力引起的振动频率等于机械的固有频率时,将导致共振现象,这将对机械造成破坏,对操作者带来不安全因素。
由于构件的运动形式不同,所产生的惯性力的平衡方法也不同。
对于绕固定轴转动的回转构件(即转子),可以就其本身加以平衡;对于作往复移动或平面运动的构件,必须就整个机构进行平衡。
所以,机械的平衡问题分为转子的平衡和机构的平衡两类。
根据转子的工作状态和力学特性,从平衡的观点出发,常把转子分成两类:刚性转子和挠性转子。
一般来说,凡是工作转速远低于转子的一阶弯曲临界转速的转子视为刚性转子;而把工作转速接近或超过转子的一阶弯曲临界转速的转子视为挠性转子。
在国际标准化组织制定的"平衡词汇"标准ISO1925-1981和我国"试验机名词术语"ZBY033-82中,刚性转子被更确切地定义为"可以在一个或任意选定的两个校正平面上,以低于转子工作转速的任意转速进行平衡校正,且校正之后,在最高工作转速及低于工作转速的任意转速和接近实际的工作条件下,其不平衡量均不明显地超过所规定的平衡要求"的转子。
初中物理教育科学八年级下册第十一章 机械与功八下《杠杆平衡条件的应用——制作杆秤》导学案

课题:杠杆平衡条件的应用——制作杆秤(二)班级 姓名【学习目标】1.知道杠杆平衡条件2.利用杠杆平衡条件给杆秤标刻度3.会利用杠杆平衡条件分析杆秤刻度及量程。
【问题引导】问题一:杆秤的原理是什么?它是测量什么物理量的工具?杆秤的原理是 (用公式表示)杆秤是测量 的工具推导:问题二:你现在能利用你制作的杆秤称出糖果的质量吗?为什么?问题三:(小组讨论)杆秤的零刻度是什么含义?如何标杆秤的零刻度?[活动一]:各小组给自己组的杆秤标记零刻度的位置。
问题四:(小组讨论)杆秤的“5g ”刻度是什么含义?“5g ”应该标记在杆秤的什么位置?[活动二]:各小组给自己组的杆秤标记“5g ”的位置。
问题五:(小组讨论)你知道“10g ”刻度如何标记吗?“15g ”等其它刻度呢?[活动三]:各小组给自己组的杆秤标记“10g ”、“15g问题六:在以上基础上,你知道“1g ”刻度如何标记吗?[活动四]:各小组完善自己组的杆秤的所有刻度,分度值为1g 。
1颗3颗【深入探究】问题七:你能用你自制的杆秤称出一个鸡蛋的质量吗?为什么?问题八:(小组讨论)如何增大杆秤的量程?(1)相同情况下,杆的长度越,杆秤的量程越大;(2)相同情况下,吊绳离秤盘越,杆秤的量程越大;(3)相同情况下,秤砣质量越,杆秤的量程越大;【学以致用】如图,杆秤是民间的一种测量工具,使用时,将待测物体挂在秤钩A上,用手拎A住秤钮B或C(相当于支点),秤砣D在秤杆E上移动,当杆秤水平平衡时就可以在秤杆上读出读数。
(1)从科学的角度来看,杆秤应该是一种测量大小的工具。
它的原理是:(用公式表示)。
杆秤上的刻度是(“选填“均匀的”或“不均匀的”)。
(2)根据杠秆平衡的条件分析,使用杆秤时,当从秤纽C换到秤纽B时,最大测量值将变。
(选填“大”或“小”);若用千克的铁块替换原千克的铁块做秤砣,杆秤的最大称量将(选填“变大”、“不变”或“变小”)。
(3)若下雨使秤砣上沾满了泥土,则称量的质量将(选填“偏大”、“不变”或“偏小”),这对于卖家来说是(选填“赚了”或“亏了”)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十一章机械的平衡
一、填空题
1、造成刚性回转件不平衡的原因是,(①转速过高②质量过大③构件的质心偏离其回转轴线)
2、机器运转时,构件所产生的离心惯性力将使运动副中的摩擦和构件的内应力,(①增大②减小),(③降低④提高)机械效率,影响轴和轴承的使用寿命,引起机座或基础的强迫振动,以至造成更严重的结果。
3、回转构件达到动平衡的条件是:
4、动平衡的刚性回转件(①一定②一定不③不一定)是静平衡的。
5、已经静平衡了的刚性回转件(①一定②不一定③一定不)要进行动平衡。
6、对于轴向尺寸较小的回转件,只须进行平衡,而轴向尺寸较大的回转件,则须进行平衡。
二、简答题
1、为什么要对回转构件进行平衡?
2、刚性回转件动平衡需要满足什么条件?哪一类构件必须进行动平衡?
3、刚性回转件的动平衡和静平衡的平衡条件是什么?它们之间有何联系?
4、什么是动平衡?动平衡至少需要几个平衡平面?
5、动平衡的构件一定是静平衡的,反之亦然,对吗?为什么?
6、作往复运动的构件和作平面复合运动的构件能在构件本身内获得平衡吗?应如何平衡?
三、计算题
1、如图所示的盘形转子中,存在有4个不平衡质量,它们的大小及其质心到回转轴的距离分别为m1=10kg,r1=100mm;m2=8kg,r2=150mm;m3=7kg,r3=200mm;m4=5kg,r4=100mm。
试对该转子进行平衡设计。
2、如图所示为一均质圆盘转子,工艺要求圆盘上钻4个圆孔,圆孔直径及孔心到转轴O的距离分别为d1=40mm;r1=120mm,d2=60mm;r2=100mm,d3=50mm;r3=110mm,d4=70mm,r4=90mm。
试对该转子进行平衡设计。
3、在如图所示的三根曲轴结构中,已知m1=m2=m3=m4=m,r1=r2=r3=r4=r,l12=l23=l34=l,且曲柄位于过回转轴线的同一平面中,试判断哪根曲轴已达到了动平衡设计的要求,并说明理由。
4、在如图中所示的刚性转子中,已知各不平衡质量和向径的大小分别为: m 1=10kg ,r 1=400mm ;m 2=15kg ,r 2=300mm ;m 3=20kg ,r 3=200mm ;m 4=20kg ,r 4=300mm 。
方向如图所示,且l 12=l 23=l 34=200mm 。
在对该转子进行平衡设计时,若设计者欲选择T '和T “作为平衡平面,并取加重半径b b r r ''='=500mm.。
试求平衡质量b b
m m ''',的大小和b b r r ''',的方向。
5、图示是一垂直于回转的平面上的载荷分布图,已知Q 1=50N ,Q 2=Q 3=20N 。
r1=160mm,r2 =r3 =r=200mm,现欲使载荷得到平衡,试求离回转中心O半径为r 处的平衡重。
6、在图示的盘形转子中,有四个偏心质量位于同一回转平面内,其大小及回转半径分别为m1=5 kg,m2=7 kg,m3=8 kg,m4=10 kg;r1=r4=10 cm,r2=20 cm,r3=15 cm,方位如图所示。
又设平衡质量m b的回转半径r b=15 cm,试求平衡质量m b的大小及方位(r4与r b的夹角)。
7、图所示均质转盘,具有4个圆孔,孔径和位置分别为d 1=70mm ,d 2=120mm ,d 3=100mm ,d 4=150mm ,r 1=240mm ,r 2=180mm ,r 3=250mm ,r 4=190mm ,方位如图所示。
今在其上再钻一圆孔使之平衡,其回转半径r b =300mm 。
求该圆孔的直径d b 和方位角b 1 (r 1与r b
的夹角)。
8、高速水泵的凸轮由三个互相错开120°的偏心轮所组成,每个偏心轮的重量为4N ,其偏心距为12.7mm ,设在平衡平面A 和B 中各装一个平衡重量G A 和G B 使之平衡,其回转半径为10mm ,其他尺寸如图所示(单位mm ),求G A 和G B 的大小和位置。