能量法
能量法

1
3Eh2 10GL2
It is therefore customary in engineering practice to neglect the effect of shear in computing the strain energy of slender beams.
F 广义力
1
广义位移
基本变形下杆的应变能:(线弹性范围内)
F
V
1 2
Fl
FN2l 2EA
l
FN2 x dx
2EA
Me
V
1 2
M e
T 2l 2GI P
T 2 xdx
l 2GIP
M
V
1 M
2
M 2l 2EI
横力弯曲
M 2 x dx
2EI 0
2GI p 0
4EI 4GI p
外力功
V
W
1 2
P
A
A
PR3
2EI
3PR3
2GI p
互等定理 (Reciprocal theorems)
1. 功的互等定理
设有两组外力F1和F2分别作用于同一线弹性结构上,如 图所示,(a)、(b)分别称为结构的第一状态和第二状态。
F1 Δ11 1
F1 dF
0
线弹性范围内:
1
1
Vc
V
F 2
➢ 余能仅具有与应变能相同的量纲,无具体 的物理意义。线弹性材料,余能数值上等 于应变能,应区分两者的概念。
应变能的普遍表达式
能量法
第十章能量法承载的构件或结构发生变形时,加力点的位置都要发生变化,从而使载荷位能减少。
如果不考虑加载过程中其他形式的能量损耗,根据机械能守恒定律,减少了的载荷位能将全部转变为应变能储存于构件或结构内。
据此,通过计算构件或结构的应变能,可以确定构件或结构加力点处沿加力方向的位移。
但是,机械能守恒定律难以确定构件或结构上任意点沿任意方向的位移,也不能确定构件或结构上各点的位移函数。
应用更广泛的能量方法,不仅可以确定构件或结构上加力点处沿加力方向的位移,而且可以确定构件或结构上任意点沿任意方向的位移;不仅可以确定特定点的位移,而且可以确定梁的位移函数。
本章介绍的是:用应变能的概念,根据能量守恒原理来解决与弹性结构或构件变形有关问题的一般方法,这种方法称为能量法。
能量法既可用于计算构件或结构位移;也可用以解决静不定问题及其它一些问题;本章只讨论用能量方法计算位移。
§10.1 杆件的应变能计算前面我们曾讨论过拉伸(压缩)、扭转或弯曲时的变形计算。
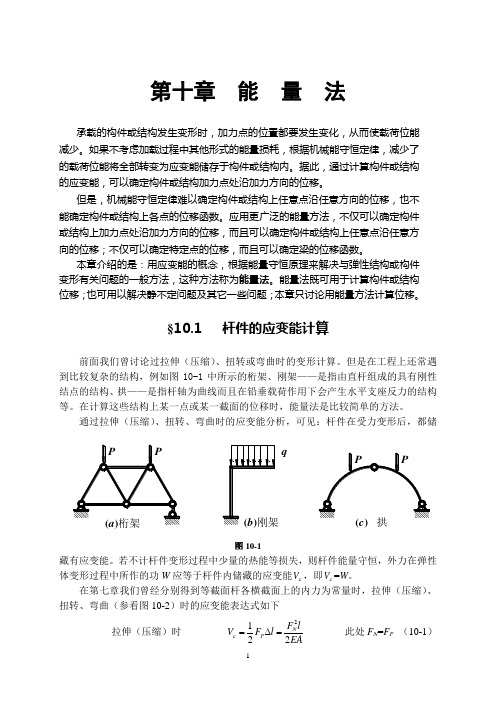
但是在工程上还常遇到比较复杂的结构,例如图10-1中所示的桁架、刚架——是指由直杆组成的具有刚性结点的结构、拱——是指杆轴为曲线而且在铅垂载荷作用下会产生水平支座反力的结构等。
在计算这些结构上某一点或某一截面的位移时,能量法是比较简单的方法。
通过拉伸(压缩)、扭转、弯曲时的应变能分析,可见:杆件在受力变形后,都储藏有应变能。
若不计杆件变形过程中少量的热能等损失,则杆件能量守恒,外力在弹性体变形过程中所作的功W应等于杆件内储藏的应变能Vε,即Vε=W。
在第七章我们曾经分别得到等截面杆各横截面上的内力为常量时,拉伸(压缩)、扭转、弯曲(参看图10-2)时的应变能表达式如下拉伸(压缩)时2122NPF lV F lEAε=∆=此处F N=F P(10-1)圆轴扭转时 2122x P PM l V M GI εϕ== 此处M x =M P (10-2)平面弯曲时 2122P M lV M EIεθ== 此处M =M P (10-3)综合以上三个表达式中外力表达的部分,可以把应变能概括地写为12V W F εδ==(10-4) 式中 F ——在拉伸(压缩)时表示拉力(压力),在扭转或弯曲时表示集中力偶,所以此处F 称为广义力;δ——在广义力作用处与广义力F 相应的位移,称为广义位移,在拉伸(压缩)时它是与拉力(压力)相应的位移l ∆,在扭转时它是与扭转力偶矩相应的转角φ,在平面弯曲时它是与弯曲力偶矩相应的截面转角θ(如图2所示)。
第十三章 - 能量法.ppt-结构力学

三 利用功能原理计算位移
第十三章 能量法/三 利用功能原理计算位移
利用
U W
1 P 2
可以计算荷载作用点的位移,但是
只限于单一荷载作用,而且所求位移只是荷载作用点 (或作用面)沿着荷载作用方向与荷载相对应的位移。
第十三章 能量法/三 利用功能原理计算位移
例题 图示变截面受拉杆,E、A 为已知,求加力点C的水平位
第十三章 能量法/二 变形能
4 关于变形能计算的讨论
1 2 以上计算公式仅适用于线弹性材料在小变形下的变形能的计算。 变形能可以通过外力功计算,也可以通过杆件微段上的内力功
等于微段的变形能,然后积分求得整个杆件上的变形能。
3 变形能为内力(或外力)的二次函数,故叠加原理在变形能计算
中不能使用。只有当杆件上任一载荷在其他载荷引起的位移上不做功
P
CP
Pl 3 48 EI
BP
mo
Pl 2 16 EI
A
B
Bm
o
C
Cm
o
mol 2 16 EI
mol 3EI
L/2
L/2
B
Pl 2 16 EI
Pl 3 mo l 2 C 48EI 16 EI
mo l 3EI
第十三章 能量法 /一 外力功
解: (2)外力功的计算
FN L U W 2 EA
式中
2
FN
——轴力,
A ——截面面积
第十三章 能量法/二 变形能
由拉压杆件组成的杆系的变形能: 2 1 5 4 受力复杂杆(轴力沿杆的轴线变化)的变形能
x
P 3
2 n Pi 2 Li FNi Li U i 1 2 Ei Ai i 1 2 Ei Ai n
浅谈偏微分方程中的基本方法——能量法
浅谈偏微分方程中的基本方法——能量法
能量法是偏微分方程研究中常用的基本方法。
该方法是通过研究能量函数在某一满足有限
条件(有限时间)内如何变化并且求得最优解来解决偏微分方程问题。
能量法的基本思想
是将偏微分方程的求解转化为寻找一个能量最小的状态。
解决偏微分方程的能量法可以分为两个步骤:第一步是建立能量函数,其通常有两部分函
数组成,即势能函数和动能函数;第二步是使用最优控制来求得满足特定有限时间、特定
步长等条件下的最优状态。
在这种情况下,在指定的时间区间内,满足最小的能量函数的
值即为最优状态。
能量法的优点是能够计算出一个渐进最优的结果。
这个结果通常比迭代法的结果更准确。
而且,能量法的计算速度也快于其他方法,它可以在较短的时间内得到准确的最优解。
但当偏微分方程存在多个复杂的有限条件时,能量法很难获得满足所有有限条件的最优解,而且计算成本也会增加。
因此,在使用能量法时,需要慎重考虑条件的选择,以及确定能
量函数等问题。
总之,能量法是偏微分方程研究中常用的一种重要方法,它可以有效的解决实际问题,取
得准确的结果。
但是在使用这种方法时,需要综合考虑多种因素,使用时应慎重,以获得
最优的结果。
第10章 能量法
EI L x
2
P A O
U =
∫
[M n ( x)]
L
2 EI
P 2 L2 dx = 6 EI
∂U PL3 = ③求位移 δ A = ∂P 3EI
例5(续): 求 A点的转角 解: ①求弯矩 M n ( x) = −(M 0 + Px) ②求变形能
U =
EI L x
P A O
N1 = N 2 cos α = Pctgα , N 2 =
对每个杆内能
2 2
P sin α
2
L
A N1 α
2
P
U =∫
L
[ N ( x)] dx + [ M T ( x)] dx + [ M n ( x)] dx = N
2 EA
∫
L
2GI p
∫
L
2 EI
L 2 EA
C
对整个杆系内能 N 12 l1 N 22 l 2 1 U = + = W = P yc 2 E A1 2 E A2 2 1 ( Pctg α ) 2 l1 l2 P 2 Py c = + ( ) 2 2 EA 1 2 EA 2 sin α
δ1 δi δn
δ2
Fi
Fn
1 n U = ∑ Fiδ i 2 i =1
二. 互等定理
1.功互等定理 Fi δ′ = Fjδ′ji ij
i 力在 j 力引起的位移δ’ij上 做的功等于j 力在 i 力引起 的位移δ’ji上做的功。
Fi
δ i′
i
0 Fj j
δ i′
i Fi
0
δ ij ′
δ j′
材料力学13能量法
功的互等定理:
F1 12 F2 21
即:F1 力在由F2力引起的位移上所作的功,等于F2 力在由F1力引起的位移上所作的功。
若F1 = F2 ,则得
位移互等定理:
12 21
即: F2引起的F1 作用点沿 F1方向的位移,等于同 样大小的力F1 引起的F2作用点沿 F2方向的位移。
( F1 F2 ) L F1 L F2 L F1F2 L V 2 EA 2 EA 2 EA EA
2
2
2
L
2) F1 单独作用下:
F1 F2
F1 L V 1 2 EA
3)F2 单独作用下:
F22 L V 2 2 EA
2
L F1 F2
L
V1 V 2 V
证毕。
b Px1 l ( 0 ≤x1 ≤ a) a CB段: M(x2 ) = RB x2 = Px2 l ( 0 ≤x2≤ b) 2
AC段:M(x1 ) = RA x1 =
13-3 应变能的普遍表达式
基础知识
广义
线弹性结构上受一个外力作用,任一点的位移与该力成正比。
线弹性结构上任意一点的广义位移与各广义力成线性 齐次关系。 比例加载时,线弹性结构上任一外力作用点沿外力方 向的位移与该点的广义力成正比。
P12 l1 P1作功为 V 3 2 EA
(5)应变能是可逆的。(跳板跳水)
总功仍为上述表达式。
直接利用功能原理求位移的实例
利用能量法求解时,所列 例 求简支梁外力P作用点C的挠度。 弯矩方程应便于求解。
解:
A x1 RA l a
P
第十三章能量法

M (x1) FB x1
F
F
B
C
A
EI
a
a
F FB F
AC段:(a x2 2a)
B
M ( x2 ) FPBB x2 FP( x2 a)
M ( x1
PFBB
)
x1 , MP(FBxB2
)
x2
C
x1
EI
x2
a
A
a
M ( x2 ) FPBB x2 FP( x2 a)
dF
W*
外力功和应变能
1
W U Fd
0
余功和余能
F1
F1 F
W
0 d 1
W * U * dF
0
2、线性弹性体
F
线性弹性体
W W*
U
U*
1 2
F11原理计算位移
利用 U W 1 F 可以计算荷载作用点的位移,此方法只限于
2 单一荷载作用,而且所求位移只是荷载作用点沿着荷载方向与荷载相 对应的位移。
x
FN (x)
dU
1 2
FN
(x) (dx)
FN2 (x)dx 2EA
比能:
u(x) dU FN2 (x)dx 1 (x) (x)
dV 2EA Adx 2
整个杆内的应变能:U dU FN2 (x)dx
l
l 2EA
FN (x) FN (x)
dx
x
FN (x)
2. 纯剪切时的变形能
比能: u 1 2 1 G 2
l GI p
Fi
l EI
Fi
例 桁架如图所示,各杆EA相同,利用卡氏第二定理求D 点的垂直位移。
材料力学第12章 能量法
范围内工作时,其轴线弯曲成为一段圆弧,如图12.5(a)所示。两端横截
面有相对转动,其夹角为θ ,由第7章求弯曲变形的方法可以求出
图12.5 与前面的情况相似,在线弹性范围内,当弯曲外力偶矩由零逐渐增加到M0时
,梁两端截面相对于转动产生的夹角也从零逐渐增加到θ ,M0与θ 的关系也
是斜直线,如图12.5(b)所示,所以杆件纯弯曲变形时的应变能为
dW在图12.2(a)中以阴影面积来表示。拉力从零增加到FP的整个加载过程
中所做的总功则为这种单元面积的总和,也就是说是△OAB的面积,即
可以将以上的分析推广到其他受力情况,因而静载荷下外力功的计算式可以
写为 式中的 F是广义力,它可以是集中力或集中力偶;Δ 是与广义力F相对应的
位移,称为广义位移,它可以是线位移或角位移。式(12.2)表明,当外力
在工程实际中,最常遇到的是横力弯曲的梁。这时梁横截面上同时有剪力和
弯矩,所以梁的应变能应包括两部分:弯矩产生的应变能和剪力产生的应变 能。在细长梁的情况下,剪切应变能与弯曲应变能相比,一般很小,可以不
计,常只计算弯曲应变能。另外,此时弯矩通常均随着截面位置的不同而变
化,类似于式(12.5)与式(12.9),梁的弯曲应变能为
表面上的剪力与相应的位移方向垂直,没有做功。因此,单元体各表面上的 剪切力在单元体变形过程中所做的功为
故单元体内积蓄的应变能为
则单元体内积蓄的应变比能为
下
这表明,vε 等于γ 直线
的面积。由剪切胡克定律=Gγ ,比能又可以写成下列形式
(3)扭转 如图12.4(a)所示的受扭圆轴,若扭转力偶矩由零开始缓慢增加到最终值T
,积蓄在弹性体内的应变能Vε 及能量耗损Δ E在数值上应等于载荷所做的功 ,既 如果在加载过程中动能和其他形式的能量耗损不计,应有
材料力学第8章-能量法

能量原理的应用
能量原理可以应用于弯曲、拉伸、压缩等各种不同的力学问题。通过计算系统的势能和应变能,可以分 析材料的应力分布、变形情况和稳定性。
弹性势能和弹性材料的能量原 理
弹性势能是指弹性材料在外力作用下产生的能量。通过应变能和弹性势能之 间的关系,可以推导出弹性材料的力学性质和变形方程。
弹塑性材料的能量原理
材料力学第8章-能量法
材料力学的能量法是研究材料变形和力学行为的重要方法,它具有广泛的应 用。本章将介绍能量法的基本概念和应用,以及弹性和弹塑性材料的能量原 理。
能量法的基本概念
能量法是一种力学分析方法,通过考虑系统的能量变化,推导出材料的力学 性质和变形行为。能量法的基本概念包括势能和应变能的概念,以及能量守 恒定律。
通过能量法,我们可以分析臂梁在外力作用下的弯曲行为。通过计算和优化梁的几何参数和材料性质, 可以设计出更加稳定和高效的悬臂梁结构。
总结和要点
能量法是一种重要的材料力学分析方法,它通过考虑材料的能量变化,分析 材料的力学性质和变形行为。
对于弹塑性材料,除了考虑弹性势能外,还需要考虑应变能和塑性势能的贡献。能量原理可以用来分析 弹塑性材料的强度和变形行为。
能量法在材料力学中的重要性
能量法是材料力学中的一种基本方法,它可以用来分析各种不同类型的力学问题,包括材料的变形、破 坏和失稳行为。掌握能量法对于研究和设计材料结构至关重要。
应用实例:悬臂梁弯曲问题的分析
材料力学第12篇能量方法

(
2 x
2 xy
2 xz
)dV
V 2E 2G 2G
M T(x) M (x)
FN (x)
MT(x) M (x) F N (x)
dx 图12.9
组合变形时的应变能
M T(x) M (x)
FN (x)
MT(x) M (x) FN (x)
dx
图12.9
dV
dW
1 2
FN (x)d(l)
1 2
M T (x)d
dF1l EA
F 2l 2EA
1 2
Fl
V
1 2
F l
FN2l 2EA
F
(a)
如果杆件的轴力 FN 分段为常量时
V
n FN2i li i 1 2Ei Ai
△l
l
F
F1
dF1
F A
B △l
O
△ l1 d(△ l1)
△l
(b)
图12.1
杆件轴线的轴力为变量 FN (x) 时
V
l
FN2 (x) 2 EA( x)
V
V
v
dV
l
A
1 2G
FbSISzz*图122.d6 A
dx
(d)
γdx
dx
(c) 图12.6
FS( x)
梁的应变能
V
V v dV
{
l
A
[
M 2(x)y
2EI
2 z
2
FS
2
(
x)
S
*2 z
2GI z2b 2
]dA}dx
令
k
A
I
2 z
A
材料力学 能量法
能量法一、变形能(应变能):变形固体在外力作用下由变形而储存的能量“”。
弹性变形能:变形固体在外力作用下产生的弹性变形而储存的能量1、性变形能具有可逆性。
2、塑性变形能不具有可逆性。
二、变形能的计算:利用能量守恒原理能量守恒原理:变形固体在外力作用下产生的变形而储存的能量,在数值上等于外力所作的外力功。
三、能量法:利用功能原理和功、能的概念进行计算的方法。
常见的能量法——功能原理、单位力(莫尔积分)、卡氏定理等。
在卡氏第二定理中应该注意的问题①、Vε——整体结构在外载作用下的线弹性变形能。
②、F i视为变量,结构反力和变形能等都必须表示为F i的函数②、Δi为F i作用点的、沿F i方向的变形③、Δi处要有相应的荷载,当无与Δi对应的F i时,可采用附加力法进行计算。
既先加一沿Δi方向的F i(在所求位移处沿所求位移的方向加上相对应的附加力),求偏导后,在令其为零,结果即为实际荷载作用的位移⑤、结果为正时,说明Δi与F i的方向相同;结果为负时,说明Δi与的F i方向相反。
单位力载荷法注意问题1、此种方法存在两个力系:一个为实际的力系;另一个为单位力系。
2、单位力必须与所求位移相对应:若求线位移——则单位力必须作用在所求点沿所求位移方向加单位的集中力;若求角位移——则单位力必须作用在所求点沿所求位移方向加单位的集中力偶。
2、内力的坐标系必须一致,每段杆的坐标系可自由建立。
莫尔积分必须遍及整个结构。
4、结果为“+”只说明所加的单位力的方向与实际的位移方向相同;“-”只说明所加的单位力的方向与实际的位移方向相反。
材料力学(能量法)
弹性变形阶段
01
外力作用下,材料发生弹性变形,此时外力所做的功全部转化
为应变能储存于材料内部。
塑性变形阶段
02
当外力继续增加,材料进入塑性变形阶段,部分应变能转化为
热能散失到环境中。
断裂破坏阶段
03
当材料达到强度极限时发生断裂破坏,此时储存的应变能迅速
释放并转化为断裂表面的新表面能和其他形式的能量。
非圆截面扭转时的能量可以通过实验或数值模拟等方法进 行计算,以获得准确的能量值。
扭转变形过程中能量转化
弹性变形能
在扭转变形过程中,部分能量以弹性变形能的形式储存在材料中。 当外力去除后,这部分能量可以释放并使材料恢复原状。
塑性变形能
当扭转变形超过材料的弹性极限时,部分能量会以塑性变形能的形 式消耗在材料中。这部分能量不可逆转,导致材料产生永久变形。
压缩过程中能量变化
外力做功
在压缩过程中,外力对杆件做 功,使其产生压缩变形和位移 。外力做功的大小与外力的大 小和杆件的位移成正比。
内力耗能
杆件在压缩过程中,材料内部 会产生应力和应变,从而消耗 能量。内力耗能的大小与材料 的应力-应变关系有关。
弹性势能
杆件在压缩过程中,由于材料 的弹性变形,会储存一定的弹 性势能。弹性势能的大小与材 料的弹性模量和变形量有关。
结构稳定性分析方法
能量准则
通过比较结构失稳前后的能量变 化,判断结构的稳定性。若失稳 后能量降低,则结构不稳定。
平衡路径跟踪法
通过逐步增加荷载或位移,跟踪 结构的平衡路径,观察结构从稳 定到不稳定的转变过程。
特征值分析法
基于结构刚度矩阵和质量矩阵, 求解特征值和特征向量,分析结 构的振动特性和稳定性。
材料力学2--能量法
因仅与第i个荷载相应的位移有一微小增量, 而与其余各荷载相应 的位移保持不变,因此,对于位移的微小增量d i ,仅Fi 作了外 力功,外力功的变化为:
d W Fi di
注意到上式与下式在数值上相等
V d V d i i
从而有:
V Fi i
(卡氏第一定理 )22l l 2 l l 2 FN EA
F F F Fl FN 2 sin 2 tan 2 l 2
F 代入前一式得: l EA
3
F F= ( /l )3 EA
或: F EA
l
3
(几何非线性弹性问题)
O
其F-间的非线性关系曲线为: 应变能为:
所以有
V vV v Al
应变能的特征:
(1)应变能恒为正的标量,与坐标系的选取无关; (2)由能量守恒原理可以证明:应变能仅与荷载的 最终值有关,而与加载的顺序无关; (3)在线弹性范围之内,应变能为内力(或位移) 的二次函数,因此力的叠加原理不再适用;
例1:弯曲刚度为 EI 的简支梁受均布荷载 q 作用,如图所 示。 试求梁内的应变能 。
由于外力余功在数值上等于余能,得
d V c d Wc
V c 解得: i Fi
(称为“余能定理”)
特别:对线弹性体,由于力与位移成正比,应变能 V 在数值上等于余能V c , 此时上式变为:
V i Fi
(称为“卡氏第二定理”)
式中的Fi 和i分别为广义力和广义位移。
应用卡氏第一定理得
V EA 4 2 2 ( 1 2) 0 1 2l 2 2 V EA 2 ( 1 2) F 2 2l 2
能量法

2
l
4、剪切变形应变能 圆环形
F ( x )dx V KS l 2GA
2 S
KS=10/9 KS=2 KS=A/Af
KS=6/5
薄壁圆环 工字形 矩形
实心梁可以不计剪力影响, 薄壁截面梁剪切应变能不能忽略; 除非
l 8 h
1 同种材料,弹性模量E已知,求系统的应变能。
2Al Al
P
1 1 1 W2 Q1 Q1 Q2 Q 2 Qn Qn 2 2 2
第二组力作用时, 第一组力保持为 常力。
P1
Pi
Q1
Qj
p1
pi
'p 1
' Q1 pi
Qj
第二组力Qj引起第一组力的作用点的位移
Pi
做功 Pi在Qj产生的位移 Pi
W12 P 1 P1 P 2 P 2 P m Pm
克拉贝依隆原理
组合变形应变能
FN ( x )dx d ( l ) EA
T ( x)dx d GI
, ,
M ( x)dx d EI
FS(x)
d K S
FS ( x )dx GA
dV
1 FN ( x )d ( l ) 2 1 T ( x )d 2 1 M ( x )d 2
用自己大大的爱,
去做一件小小的善事。
基本变形的刚度计算 轴向拉压
l
FN l EA
Tl GI P
内力 杆件长度 抗变形刚度
扭转变形
弯曲变形
M( x ) ' ' EI
组合变形的刚度计算
强度理论
解决了组合变形的强度问题 组合变形的刚度问题怎么办
12能量法
1
目录
§12-1 概述
1. 外力功与变形能 弹性杆受拉力P作用(图 11-1),当P从零开始到终 值 缓慢加载时,力P在其作 用方向上的相应位移也由 零增至 1 而做的功,称为 外力功。
W Pd
0
1
2
§12-1 概述
与此同时弹性杆被拉长 1 而具有做功的能力,表明 杆件内储存了变形能。单 位体积储存的应变能称为 应变比能
41
§12-6
虚功原理
Wi Nd (l )* Md * Qd* Td *
42
§12-6
虚功原理
* * * P v1 P2v2 P n vn q( x)v* ( x)dx 1 l
Nd (l )* Md * Qd * Td *
30
§12-5
卡氏定理
解:外伸端C作用有集中力P,截面A作用有集中力偶矩m, 根据卡氏第二定理有:
U M ( x) M ( x) U M ( x) M ( x) fc dx A dx l EI l EI P P m m
31
§12-5
卡氏定理
m Pc a AB段: M 1 ( x1 ) R A x1 m x1 m l l M 1 ( x1 ) x1 M 1 ( x1 ) a 1 x1 m l P l
18
§12-2
杆件变形能计算
对于截面尺寸远小于半径R的曲杆(常称小曲率曲 杆),可按直杆计算其变形能,微段内的变形能 是
M 2 Rd T 2 Rd dU 2EI 2GI
19
§12-2
杆件变形能计算
整个曲杆变形能可在杆上积分,即
材料力学第十三章 能量法
1 W F wC 2
由Vε=W 得
Fa 2b 2 wC 3 EIl
例题
试求图示四分之一圆曲杆的变形能,并利用功能原理求B截
B
面的垂直位移. 已知EI为常量.
解: M ( ) FRsin
F
R
θ
M ( ) Vε Rd l 2 EI π ( FRsin )2 πF 2 R 3 2 Rd A 0 2 EI 8 EI 1 W F y 2 πFR 3 由Vε=W 得 y 4 EI
1 1 1 1 W P1 1 P2 2 P3 3 Pn n 2 2 2 2
All forces are applied slowly from zero to the final value. All deformations are within the proportional limit. Conclusion: (1) U is not related to the order in which the forces are applied. (2) U = W
q
A B
F=qa
C x A x B x 2a a
C
1
x
FRA
2a
a
1/2a
(2)求C 截面的转角(在C处加一单位力偶)
qa qx 2 x AB: M ( x) x M ( x) 2 2 2a BC: M ( x ) qa x M ( x) 1 2 2 a qa a 1 qx x C [ ( x )( )dx ( qax )(1)dx ] 0 EI 0 2 2 2a 5qa 3 6 EI ( )
例题 图示外伸梁,其抗弯刚度为 EI. 用单位载荷法求C点的挠 度和转角.
能量法

L
M ( x ) M ( x ) dx EI Pi
(不仅适用于直木杆,对横截面高度远小于轴线半径的平面曲 杆也适用)
n N j l j N j U (桁架结构) 拉(压) i Pi j 1 EAj Pi
扭转
T ( x ) T ( x ) i (弧度) dx L GI Pi P
例3.求图示 刚架A截面 的水平位移 和转角。
解: (一)求 f A水平 1. 附加Pf 2. 计算外力 3. 列弯矩方程
一般情形下的应变比能
1) 微元应变能(Strain Energy)
2
1dydz ~ 1dx
1
dy
2dxdz ~ 2dy
3
dx
dz
3dydx ~ 3dz
1 dW= 1dydz 1dx 2 1 2dxdz 2dy 2 1 3dxdy 3dz 2 1 11 2 2 3 3 dxdydz 2
AB: M(x1) = - MB
M ( x1 ) 0 P M ( x1 ) 1 M B
CA: M(x2) = - MB - P(x2 - L/2)
M ( x2 ) L ( x2 ) P 2 M ( x2 ) 1 M B U 2.求 f A : f A P L L M ( x ) M ( x ) M ( x1 ) M ( x1 ) 2 2 2 dx2 dx1 L 0 EI P EI P 2 3 PL ( ) 6 EI
先作用ΔPi ,后作用{Pk|k=1,...,n} ;由功的互等定理,得:
P 1 P2 2 ... P i ... Pn n P i 1 i i
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C
D
2、欲测定图示梁端截面的转角θA,但只有 测量挠度的仪器,你怎样用改变加载方式的
方法达到此目的?
P
A θA
3、两相同的平面刚架受载如图,下列关系中 正确的是: 。
A:xB(a)=xC(b) B:yC(b)=θB(a) C:yB(a)=yC(b) D:yC(a)=θB(b)
B A
P=1 B C
Pi在Qj产生的位移 P i 做功
W12 P1 P 1 P2 P 2 Pm Pm
先加P后加Q时做功总和为:
V1 W1 W2 W12
将加载次序反过来,先加力Q后加力P,Qj在相应
位移 Qj 上做功为:
1 2
Q1 Q1
1 2
Q2
Q2
1 2
Qn
Qn
W2
再加Pi (i=1,2,…,m)力,Pi在其相应位移 Pi 做功
P
M L
2 刚度EI、GIP为常量。 求系统的应变能
P
§13-4 互等定理
考虑两组力P,Q作用于物体;
第一组力有m个载荷P1,P2,…,Pm; 第二组力有n个载荷Q1,Q2,…,Qn。
若先将第一组力Pi(i=1,2,…,m) 单独作用
P1
力做功
W1
1 2
P1 P1
1 2
P2
P2
1 2
Pm
Pm
δP1
杆的应变能
V W P L
2
V FN 2 L 2 EA
由拉压杆件组成的杆系的应变能:
2P
P
2
K
B
1
5
3
D
4
C
V n FN2i Li
i1 2Ei Ai
受力复杂杆(轴力沿杆的轴线变化)的应变能
x dx
L
q
V dV FN 2( x )dx
L
L 2EA
2、圆截面杆的扭转应变能
m
Tl
GI P
3EI
A
a
P
L
δ1
R B 第二组力在第一组力引起
的位移上做功: 零
功互等定理
δ2
Pa2 ( 3l a ) R l 3 0
X=1 6 EI
3EI
RB
P 2
a2 l2
(3l
a)
1、已知梁在力偶M的单独作用下C截面的挠度为
yc=3毫米,则在力P单独作用下D截面的转角为
θD=
。
C P=2KN
M=1KNm D
如果略去变形过程中的动能及其它能量的损失;
由能体都适用的普遍原理
弹性固体变形是可逆的;
当外力解除后,弹性体将恢复其原来形状,释放出 变形能而做功。
但当超出了弹性范围,具有塑性变形的固体, 变形能不能全部转变为功,
因为变形体产生塑性变形时要消耗一部分能量, 留下残余变形。
随后作用上第二组力Qj(j=1,2,…,n)
Qj在其相应位移 Qj 上做功为
Pi Q1
Qj
δPi δQ1 δQj
W2
1 2
Q1
Q1
1 2
Q2
Q
2
1 2
Qn
Qn
第二组力Qj引起第一组力的作用点的位移 P i
P1
Pi Q1
Qj
δP1 δ’P1
δPi δQ1 δ’Pi
δQj
与此同时,因为Pi力的存在,且已达到终值且值不变;
L
EI
1.0c
M ( x )M ( x )dx
L
EI
1.0c
M ( x )M ( x )dx
L
EI
——莫尔积分法又称单位载荷法。
M(x) :实际载荷引起的弯矩;
M ( x ) : 单位载荷引起的弯矩。
求转角的莫尔积分
1.0 c
M( x )M ( x )dx
L
EI
在欲求截面处施加一单位力偶
有一增量dβ
力在位移增量上做功 Pi d i
力在位移增量上做总功
dW P11d P2 2 d Pn n d
β从0到1 外力做功
1
W
(P11
Pn n )
d
0
1 2
P11
1 2
P2 2
1 2
Pn n
物体的应变能为
V
W
1 2
P11
1 2
P2 2
1 2
Pn n
克拉贝依隆原理
组合变形时的变形能
L
EA
L
EI
L GI p
注意几点
1、施加单位力时所有的外载卸掉,支座保持不动; 2、外载作用下的内力方程与单位力作用下的内力 方程要求正方向与积分区间的严格一致;
3、求位移施加力,求转角施加单位力偶
4、结果为正,说明广义位移与单位力同向; 5、外载作用下分段,单位载荷作用下也必须分成相 应的段数;
L
2EI
F1
Fi Fn 1.0 C
δc
两种情况都是构件的总应变能
[ M ( x ) M ( x )]2 dx
V0 V 1.0 c L
2 EI
M 2( x )dx M ( x )M ( x )dx M 2( x )dx
L 2EI
L
EI
L 2EI
V V0
M ( x )M ( x )dx
一对力偶
一个线位移 一个角位移 相对线位移
注意几点
6、欲求的位移和施加的单位力应理解为广义力 和广义位移。
7、若为两点间的相对线位移,则单位力是施加在两 点上的 方向相反的一对单位力,
其作用线与两点的连线重合。 8、若为两截面间的相对转角,则单位力是
施加在两截面上的 方向相反的一对单位力偶;
广义力与广义位移的对应关系
一个力
一个力偶
一对力
强度理论 解决了组合变形的强度问题 组合变形的刚度问题怎么办?
能否避免组合变形的微分方程
弯曲变形 积分法求变形 得到整个挠曲线
能否只求出若干控制点的变形,避免求整 个变形曲线
§13-1 概述 §13-2 杆件应变能的计算 §13-3 应变能的普遍表达式 §13-4 互等定理 §13-7 莫尔积分 §13-5卡氏定理 §13-8 图形互乘法
W 1
2
P1
P1
1 2
P2
P2
1 2
Pm
Pm
1
同时物体上已作用有Qj且其值不变,
Qj在由于Pi引起的Qj作用点沿Qj方向的位移 Q j上做功 Q1 Q 1 Q2 Q 2 Qn Q n W21
两组力所做的总功为:
V2 W1 W2 W21
由于变形能只决定于力与位移的最终值,与加力次 序无关,故有V1=V2,
位移互等定理
例题:装有尾顶针的车削工件可简化成超静定梁, 如图,试用互等定理求解。
A B
a
P
L
A
a
P
L
δ1
R
第一组力: P、R
B
1
a2 6EI
(3l
a)
2
l3 3EI
δ2 X=1
第二组力 X=1
第一组力在第二组力引起的位移上做功
P 1 R 2
Pa 2 ( 3l a ) R l 3
6 EI
d( l ) FN ( x )dx
EA
d T (x)dx
GI
,
d M (x)dx
,
EI
dV 1 N( x )d( l ) 1 T( x )d 1 M( x )d
2
2
2
V
FN2( x )dx
T 2( x )dx
M 2( x )dx
L 2EA L 2GI p L 2EI
注意 1 以上计算公式仅适用于线弹性材料、
δ2 δn
相应地物体产生变形δ1,
δ1
δ2,…,δn,
对于线性弹性材料,则变形也将按相同比例β增加;
外力对物体做功,功以应变能储 藏在物体内;
Pi βPi (δi 、Pi)
如果外力在某一中间值βP1, βP2,…,βPn时
各点处的广义位移达到中间值
βδ1,β δ 2,…,β δ n时
δi βδi dβδi
P
45
L
L
2 同种材料,弹性模量E已知。求系统的应变能
2AL
AL
P
3 抗弯刚度EI为常量。求系统的应变能
M
2L/3
4 抗弯刚度EI为常量。 求系统的应变能
P
L/3
2L/3
5 抗弯刚度EI为常量。 求系统的应变能
P
6、已知杆件的抗拉压刚度为EI,在截面的下端与 刚性平面间有一间隙Δ,当A截面处有轴向力P,使
的点沿挠度方向加一单位力 P0 ;1
在单位力的作用下,梁的应变能为
M 2( x )dx
V0 L 2EI
F1
Fi Fn 1.0 C
再将原来一组载荷作用于梁上 。
fc
由于材料服从胡克定律,且变形很小,
外载在梁上作的功仍等于
M 2( x )dx
V L 2EI
由于外载的作用,在C点发生的挠度即为所求 c 。
C截面的位移等于Δ时,杆件的应变能为 。
a A
b C
7、直角折轴的抗弯刚度为EI抗扭高度为GIP,在 两个集中力P的作用下,AB杆的应变形能为 。
PL P
a
§13-3 应变能的普遍表达式
一、 克拉贝依隆原理
Pn P2
广义力P1,P2,…,Pn作用 于物体,且设按同一比例系 P1 数β从零增长到终值。
m=Pa
P
A B
C
a
a
M 2( x )dx