坐标转换之坐标转换模型
GPS测量中坐标系之间的转换
GPS测量中的坐标系转换第一章绪论1.1概述坐标转化并不是一个新的课题,随着测绘事业的发展,全球一体化的形成,越来越要求全球测绘资料的统一。
尤其是在坐标系统的统一方面.原始的大地测量工作主要是依靠光学仪器进行,这样不免受到近地面大气的影响,同时受地球曲率的影响很大,在通视条件上受到很大的限制,从而对全球测绘资料的一体化产生巨大的约束性。
另外由于每一个国家的大地坐标系的建立和发展具有一定的历史特性,仅常用的大地坐标系就有150余个。
在同一个国家,在不同的历史时期由于习惯的改变或经济的发展变化也会采用不同的坐标系统。
例如:在我国建国之后,为了尽快搞好基础建设,我国采用了应用克氏椭球与我国实际相结合的北京54坐标系;随着经济的发展北京54坐标系的缺陷也随之被表露的越来越明显,特别是对我国经济较发达的东南沿海地区的影响表现得更为明显,进而我国开始研究并使用国家80坐标系。
在实际生活中,在一些地区由于国家建设的急需,来不及布设国家统一的大地控制网,而建立局部的独立坐标系。
而后,再将其转换到国家统一的大地控制网中,这些坐标系的变换都离不开坐标值的转化.在国际上,随着1964年美国海军武器实验室对第一代卫星导航系统─NNSS的研制成功,为测绘资料的全球一体化提供了可能。
到1972年,经过美国国防部的批准,开始了第二代卫星导航系统的开发研究工作,即为现在所说的GPS。
此套卫星导航系统满足了全球范围、全天候、连续实时以及三维导航和定位的要求.正是由于GPS卫星的这些特性,这种技术就很快被广大测绘工作者接受。
是由于坐标系统的不同,对GPS技术的推广使用造成了一定的障碍。
这样坐标转换的问题再一次被提到了重要的位置。
为了描述卫星运动,处理观测数据和表示测站位置,需要建立与之相应的坐标系统。
在GPS测量中,通常采用两种坐标系统,即协议天球坐标系和协议地球坐标系。
其中协议地球坐标系采用的是1984年世界大地坐标系(Word Geodetic System 1984─WGS-84)其主要参数为:长半轴 a=6378137; 扁率 f=1:298.257223563.而我国采用的坐标系并不是WGS-84坐标系而是BJ-54坐标系,这个坐标系是与前苏联的1942年普耳科沃坐标系有关的,其主要参数为: 长半轴 a=6378245; 扁率 f=1:298.3.这就使得同一点在不同的坐标系下有不同的坐标值,这样使测绘资料的使用范围受到很大的限制,并且对GPS系统在我国的广泛使用造成了一定的约束性,对我国的测绘事业的发展不利。
云南省2000国家大地坐标系坐标转换部分
相同历元不同框架坐标比较
相同历元不同框架点位坐标差异,下表以昆明站为例
IGS坐标
X(m)
Y(m)
Z(m) ΔX(m) ΔY(m) ΔZ(m)
ITRF2000
-1281255.473
5640746.079
2682880.117
-0.0318,-0.0024,-0.0203
ITRF2005
ITRF2000 ITRF2005
-1281255.565
5640746.060
2682880.057
IGS站坐标和速度场的解算精度
σ X(mm)
10
σY(mm) 22
σZ(mm) 12
1.0
1.0
1.0
-0.0317, 0.0035.-0.0147
σX1(mm) σY1(mm) σZ1(mm)
3.7 8.3 4.3 0.2 0.4 0.2
顾及全部7参数和椭球大小变化的转化公式又称为广义大地坐 标微分公式或广义变换椭球微分公式。
dB
- sinBcosL M+H
dL
=
-
(N
sinL + H)cosB
dH
cosBcosL
- sinBsinL M+H cosL
(N + H)cosB cosBsinL
cosB
M+H 0
sinB
T (t) T (tk ) T (t tk )
GPS C级网转换到CGCS2000 坐标系
从ITRF2000转换到以前框架的转换参数与速率(历元1997. 0)
转换参数
T1(cm) T2(cm) T3(cm)
Dppb
R1.001" R2.001" R3.001"
cad图纸的坐标怎么转换成大地坐标
Cad图纸的坐标怎么转换成大地坐标坐标转换是在不同坐标系统之间转换位置信息的过程。
在CAD(Computer-Aided Design,计算机辅助设计)软件中,坐标转换是一项常见的任务,因为CAD软件通常使用自己的坐标系统来定义和表示绘图中的对象。
然而,有时候我们需要将CAD图纸中的坐标转换成更实际的大地坐标系统,以便在地理信息系统(GIS)中进行分析和处理。
下面将介绍将CAD图纸的坐标转换成大地坐标的方法。
1. 理解CAD图纸坐标系统在CAD软件中,通常使用笛卡尔坐标系统来定义和表示对象的位置。
该坐标系统以原点为基准,通过X、Y和Z轴来确定位置。
原点通常是图纸的左下角或中心点,而X轴和Y轴则沿着图纸的水平和垂直方向。
2. 确定CAD图纸的基准点在进行坐标转换之前,我们需要确定CAD图纸上的一个基准点,并将其与实际世界中的大地坐标相关联。
这个基准点通常是图纸上的一个明确的标志物,比如交叉点、角落或特定的参考点。
在选择基准点时,最好选择具有明确标记和易于识别的点。
3. 获取基准点的大地坐标获得基准点的大地坐标是进行坐标转换的关键步骤。
这可以通过使用全球定位系统(GPS)设备或地理勘测的方法来获取。
在进行大地勘测时,需要测量基准点的经纬度、高程和椭球面参数等信息。
这些数据将用于将CAD图纸坐标转换为大地坐标。
4. 建立CAD坐标到大地坐标的转换模型一旦获得了基准点的大地坐标,就可以建立一个转换模型来将CAD图纸中的坐标转换为大地坐标。
这个转换模型可以是简单的线性变换,也可以是使用复杂的地理转换算法来校正误差和投影变换等。
这个模型需要将CAD图纸坐标的原点和轴与基准点的大地坐标相关联。
5. 实施坐标转换一旦建立了转换模型,就可以开始将CAD图纸中的任意点的坐标转换为大地坐标。
这可以通过应用转换模型的算法来实现。
通常,CAD软件提供了一些工具或脚本来进行坐标转换。
在进行转换时,需要将CAD图纸坐标输入到转换模型中,并获得相应的大地坐标结果。
不同空间直角坐标系的转换

不同空间直角坐标系的转换
欧勒角
不同空间直角坐标系的转换,包括三个坐标轴的平移和坐标轴的旋转,以及两个坐标系的尺度比参数,坐标轴之间的三个旋转角叫欧勒角。
三参数法
三参数坐标转换公式是在假设两坐标系间各坐标轴相互平行,轴系间不存在欧勒角的条件下得出的。
实际应用中,因为欧勒角不大,可以用三参数公式近似地进行空间直角坐标系统的转换。
公共点只有一个时,采用三参数公式进行转换。
七参数法
用七参数进行空间直角坐标转换有布尔莎公式,莫洛琴斯基公式和范氏公式等。
下面给出布尔莎七参数公式:
坐标转换多项式回归模型
坐标转换七参数公式属于相似变换模型。
大地控制网中的系统误差一般呈区域性,当区域较小时,区域性的系统误差被相似变换参数拟合,故局部区域的坐标转换采用七参数公式模型是比较适宜的。
但对全国或一个省区范围内的坐标转换,可以采用多项式回归模型,将各区域的系统偏差拟合到回归参数中,从而提高坐标转换精度。
两种不同空间直角坐标系转换时,坐标转换的精度取决于坐标转换的数学模型和求解转换系数的公共点坐标精度,此外,还与公共点的分布有关。
鉴于地面控制网系统误差在⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000111222Z Y X Z Y X Z Y X ⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000111111222000)1(Z Y X Z Y X Z Y X m Z Y X X Y X Z Y Z εεεεεε
不同区域并非是一个常数,所以采用分区进行坐标转换能更好地反映实际情况,提高坐标转换的精度。
24 MapGIS 10.3国家2000坐标系转换 【MapGIS 10.3 教程-PPT】

地理坐标系 北京54 西安80 中国2000 WGS84
长轴(m) 6378245 6378140 6378137 6378137.000
短轴(m) 6356863 6356755 6356752 6356752.314
扁率 1/298.3 1/298.25722101 1/298.257222101 1/298.257223563
要实现各种成果坐标框架统一到 CGCS2000坐标框架下, 需要将原有成果 进行坐标转换, 即将原有成果坐标系转换 到CGCS2000。
数据来源
根据不同比例尺和转换区域选择合适的转换模型,选取两个坐标系下重合点(可选 用CGCS2000国家大地控制网点、国家大地测量控制点)计算模型转换参数,根据模型 残差进行精度评估和检核。
控制点对坐标
即两个坐标系下重合点坐标
椭球转换参数
即椭球模型间转换参数
控制点对坐标,可以在当地测绘主管单位进行咨询 (注明:此控制点文件为虚构的示例数据)
地理转换参数设置
以80转2000椭球为例
这两种坐标系统的起算点不在一个椭球基准面上, 这就涉及到两个椭球间的相互转换问题。所谓坐标转换 的过程最重要的就是转换参数的求解。
椭球 克拉索夫斯基椭球 1975年I.U.G.G推荐椭球 中国2000椭球 1979年I.U.G.G推荐椭球
七参数bursawol法:即计算X平移,Y平移,Z平移,X旋转,Y旋转,Z旋转,尺度变化K
三参数直角平移法:即X平移,Y平移,Z平移,将X旋转,Y旋转,Z旋转,尺度变化K视为0,三参数是七参数的一种 特例。`
第三种:导入转换项
计算转换参数
导入完毕,点击“确定”
第三种:导入转换项
添加转换项
坐标转换经纬度方法

坐标转换经纬度方法
在不同的地图和GIS系统中,使用的坐标系可能会有所不同,如平面
坐标系、投影坐标系等。
为了能够在不同坐标系间进行位置的准确转换,
我们需要一些数学和地理学知识。
下面我将介绍几种常用的坐标转换经纬
度的方法。
1.WGS84转换方法:
WGS84坐标系是一种全球标准的地理坐标系,被广泛应用于地图制图
和导航系统中。
如果我们的原坐标系不是WGS84,需要将其转换为WGS84
坐标系,再进行经纬度的计算和转换。
2.地球椭球体模型方法:
地球不是完美的球体,而是稍微椭圆形状的。
因此,在进行坐标转换时,我们需要考虑地球的椭球体模型,以提高计算的准确性。
3.投影方法:
在地图制图和GIS系统中,常常需要将地球表面的三维坐标转换为二
维平面坐标。
这时,我们需要采用投影方法,将经纬度坐标投射到平面坐
标系中。
4.基准面转换方法:
在一些特殊的地理环境中,可能存在多个坐标基准面,如北京54坐
标系、西安80坐标系等。
当我们需要进行不同基准面之间的坐标转换时,需要特定的转换参数和数学模型。
5.GIS软件和工具方法:
在实际的坐标转换过程中,我们可以使用一些专业的GIS软件和在线工具来进行坐标的转换计算。
这些工具通常提供了多种常用的坐标系之间的转换方法,并能够以图形化的方式呈现转换结果。
总结起来,坐标转换经纬度的方法包括WGS84转换方法、地球椭球体模型方法、投影方法、基准面转换方法和GIS软件和工具方法。
根据不同的需求和环境,可以选择合适的方法来进行坐标转换,以获取准确的经纬度坐标。
坐标转换之计算公式+7参+四参模型
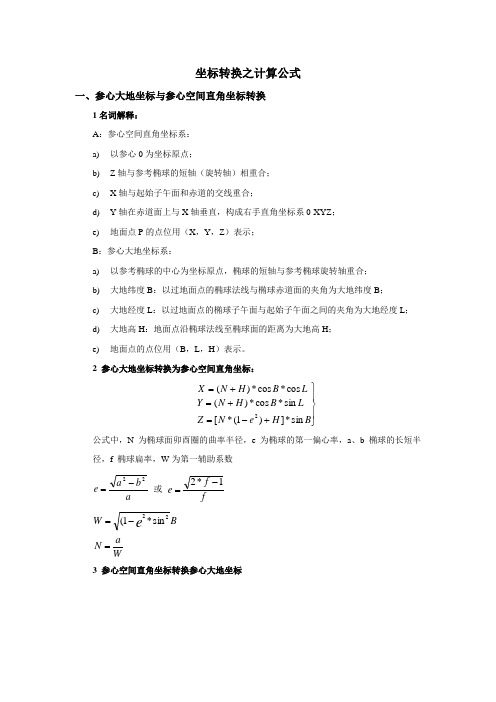
坐标转换之计算公式一、参心大地坐标与参心空间直角坐标转换1名词解释:A :参心空间直角坐标系:a) 以参心0为坐标原点;b) Z 轴与参考椭球的短轴(旋转轴)相重合;c) X 轴与起始子午面和赤道的交线重合;d) Y 轴在赤道面上与X 轴垂直,构成右手直角坐标系0-XYZ ;e) 地面点P 的点位用(X ,Y ,Z )表示;B :参心大地坐标系:a) 以参考椭球的中心为坐标原点,椭球的短轴与参考椭球旋转轴重合;b) 大地纬度B :以过地面点的椭球法线与椭球赤道面的夹角为大地纬度B ;c) 大地经度L :以过地面点的椭球子午面与起始子午面之间的夹角为大地经度L ;d) 大地高H :地面点沿椭球法线至椭球面的距离为大地高H ;e) 地面点的点位用(B ,L ,H )表示。
2 参心大地坐标转换为参心空间直角坐标:⎪⎭⎪⎬⎫+-=+=+=B H e N Z L B H N Y L B H N X sin *])1(*[sin *cos *)(cos *cos *)(2公式中,N 为椭球面卯酉圈的曲率半径,e 为椭球的第一偏心率,a 、b 椭球的长短半径,f 椭球扁率,W 为第一辅助系数ab a e 22-= 或 f f e 1*2-= W a N BW e =-=22sin *1(3 参心空间直角坐标转换参心大地坐标[]N BY X H H e N Y X H N Z B XY L -+=+-++==cos ))1(**)()(*arctan()arctan(22222 二 高斯投影及高斯直角坐标系1、高斯投影概述高斯-克吕格投影的条件:1. 是正形投影;2. 中央子午线不变形高斯投影的性质:1. 投影后角度不变;2. 长度比与点位有关,与方向无关;3. 离中央子午线越远变形越大为控制投影后的长度变形,采用分带投影的方法。
常用3度带或6度带分带,城市或工程控制网坐标可采用不按3度带中央子午线的任意带。
2、高斯投影正算公式:522242532236425442232)5814185(cos 120)1(cos 6cos )5861(cos sin 720 495(cos sin 24cos sin 2l t t t B N l t B N Bl N y l t t B B N l t B B N Bl B N X x ηηηηη-++-++-+=+-+++-++=)3、高斯投影反算公式:()()()⎥⎥⎦⎤⎪⎪⎭⎫ ⎝⎛+++⎪⎪⎭⎫ ⎝⎛⎢⎣⎡-++-⎪⎪⎭⎫ ⎝⎛-=⎥⎥⎥⎥⎦⎤⎪⎪⎭⎫ ⎝⎛+++++⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛++-⎪⎪⎭⎫ ⎝⎛=442222224222422224590613601 9351211286242851201 )21(611cos 1f f f f f f f f f f f f f f f f f f f f f f f N y t t N y t t N y y M t B B N y t t t N y t N y B l ηηηηη四参数模型:。
如何进行地图数据的坐标转换

如何进行地图数据的坐标转换地图数据的坐标转换在现代社会中扮演着重要的角色。
随着科技的进步,人们对地理信息的需求日益增长,但由于不同地理信息系统使用的坐标系统不同,我们在进行数据分析和应用时常常需要进行坐标转换。
本文将探讨如何进行地图数据的坐标转换,以满足不同需求。
一、坐标系统的基本概念每个地理信息系统都使用不同的坐标系统来表示地球上的位置。
常见的坐标系统包括经纬度坐标系统(如WGS84),平面直角坐标(如UTM),以及其他自定义坐标系统。
在进行坐标转换前,我们首先需要了解各个坐标系统的基本概念和特点。
二、经纬度与平面直角坐标的转换在实际应用中,我们经常需要将经纬度坐标转换为平面直角坐标,或者反过来。
这种转换可以通过数学公式实现。
例如,将经纬度坐标转换为UTM坐标时,可以使用高斯-克吕格投影公式。
这种转换需要考虑到地球椭球体的形状以及大地基准的选择。
三、坐标转换中的数学模型坐标转换通常涉及到复杂的数学模型和算法。
其中,4参数模型和7参数模型在实际转换中应用广泛。
4参数模型考虑了平移和缩放的影响,而7参数模型还考虑了旋转的影响。
通过精确地测量和拟合,我们可以得到适用于特定地区的最佳转换模型。
四、地图投影和坐标转换地图投影是将三维地球表面投影到二维平面上的过程。
在地图投影中,常常需要进行坐标转换来满足不同地区和应用的需求。
例如,将经纬度坐标转换为等面积投影(如面积保真投影)可以在保持地理特性的同时方便计算面积。
坐标转换在地图投影中扮演着重要的角色。
五、实际应用中的坐标转换坐标转换在现实生活中有着广泛的应用。
例如,我们需要将卫星遥感图像上标注的点位坐标转换为现实世界的地理坐标,以便进行地理分析和土地资源管理。
此外,城市规划、航海导航、地质勘探等领域也需要进行精确的坐标转换来满足各自的需求。
六、坐标转换的精度和误差分析在进行坐标转换时,精度和误差分析非常重要。
由于测量误差和模型假设的不确定性,坐标转换常常伴随着一定的误差。
测量中常见的坐标转换方法和注意事项

测量中常见的坐标转换方法和注意事项在测量工作中,坐标转换是一个非常关键的步骤。
它可以将不同坐标系下的测量数据进行转换,以便更好地进行分析和比较。
本文将讨论测量中常见的坐标转换方法和注意事项,以帮助读者更好地理解和应用这些知识。
一、常见的坐标转换方法1. 直角坐标系与极坐标系的转换直角坐标系和极坐标系是我们常见的两种坐标系,它们在不同的情况下都有各自的优势。
当我们在进行测量时,有时需要将直角坐标系转换为极坐标系,或者反过来。
这时我们可以使用以下公式进行转换:直角坐标系 (x, y) 转换为极坐标系(r, θ):r = √(x^2 + y^2)θ = arctan(y/x)极坐标系(r, θ) 转换为直角坐标系 (x, y):x = r * cosθy = r * sinθ2. 地理坐标系与平面坐标系的转换在地理测量中,我们常常需要将地理坐标系与平面坐标系进行转换。
地理坐标系是以地球表面为基准的坐标系,而平面坐标系则是在局部范围内采用平面近似地球的坐标系。
转换的目的是为了将地球上的经纬度转换为平面上的坐标点,或者反过来。
这时我们可以使用专门的地图投影算法进行转换,例如常见的墨卡托投影、UTM投影等。
3. 坐标系之间的线性转换有时,我们需要将一个坐标系中的点的坐标转换到另一个坐标系中。
这时我们可以通过线性变换来实现。
线性变换定义了一个坐标系之间的转换矩阵,通过乘以这个转换矩阵,我们可以将一个坐标系中的点的坐标转换到另一个坐标系中。
常见的线性变换包括平移、旋转、缩放等操作,它们可以通过矩阵运算进行描述。
二、坐标转换的注意事项1. 坐标系统选择的准确性在进行坐标转换时,必须保证所选择的坐标系统是准确可靠的。
不同的坐标系统有不同的基准面和基准点,选择错误可能导致转换结果出现较大误差。
因此,在进行测量时,我们应该仔细选择坐标系统,了解其基本原理和适用范围。
2. 数据质量的控制坐标转换所依赖的输入数据必须具有一定的质量保证。
地理信息中各种坐标系区别和转换总结

地理信息中各种坐标系区别和转换总结地理坐标系(Geographic Coordinate System)是基于地球椭球体的一个球面坐标系,以经度和纬度表示地球表面的位置。
地理坐标系通常使用地理坐标转换模型(如大地测量系统、WGS84等)来计算地球表面上的点的位置。
地理坐标系的优点是可以用来表示全球范围的数据,但缺点是在大范围内计算距离和面积时存在巨大误差。
平面坐标系(Planar Coordinate System)是基于平面上直角坐标系的一种坐标系统,以x和y坐标表示点的位置。
平面坐标系通常使用笛卡尔坐标系来表示地球表面上的点,例如,UTM坐标系将地球表面细分为多个区域并使用不同的投影方式计算点的位置。
平面坐标系的优点是可以更准确地计算距离和面积,但缺点是只适用于特定区域。
投影坐标系(Projected Coordinate System)是一种将三维地理坐标投射到二维平面上的坐标系统,通常用来在平面上显示地球表面的地理信息。
投影坐标系使用投影方法将地球的经纬度坐标转换为平面坐标,以便更好地显示和分析地理数据。
常见的投影坐标系有等角圆锥投影、墨卡托投影、极射赤面投影等。
不同的投影方法适用于不同区域和需求,因此选择适当的投影坐标系对于数据的正确性非常重要。
在进行坐标系转换时,需要考虑从一个坐标系转换到另一个坐标系可能引起的数据变形和误差。
常见的坐标系转换方法有投影转换和转换模型。
投影转换是将地理坐标系转换为平面坐标系或相反的过程,通常使用投影参数和转换公式来进行计算。
转换模型是通过数学模型和参数来进行坐标系转换,例如,大地测量系统(Geodetic Datum)用于将地理坐标转换为不同的投影坐标系。
需要注意的是,在进行坐标系转换时需要考虑坐标系的准确性和转换参数的正确性。
不正确的坐标系转换可能导致数据的位置错误和计算的不准确性。
因此,在进行坐标系转换时应该参考相关的参考资料和专业的软件工具,确保数据的正确性和可靠性。
二维直角坐标转换需要的4种模型基准点

二维直角坐标转换需要的4种模型基准点在进行二维直角坐标转换时,我们需要用到四种模型基准点,这些基准点通常是已知的世界坐标系中的点,用来建立几何与地理之间的联系。
下面将介绍这四种模型基准点及其在二维直角坐标转换中的应用。
1.三点平面拟合模型基准点:在这个模型中,我们需要选择三个坐标点:一个基准点以及两个相邻基准点。
这三个点可以用来确定一个平面,通过拟合这个平面,我们可以将世界坐标系中的点映射到二维直角坐标系中。
这个模型通常适用于平面地区,比如城市道路、建筑物等。
2.三点高斯-克吕格模型基准点:这个模型的基本原理是通过选择三个坐标点(一个基准点和两个相邻点),根据高斯-克吕格投影算法计算出每个点的坐标值。
高斯-克吕格投影算法是一种将地球表面经纬度坐标转换为平面坐标系的常用方法。
它通常适用于大地测量和地图制作等领域。
3.四点反距离权重插值模型基准点:这个模型需要选取四个世界坐标系中的点,用于进行反距离权重插值计算。
反距离权重插值是一种根据已知点的属性值和距离加权平均的插值算法。
它可以用来估计未知点在二维直角坐标系中的位置。
这个模型通常适用于地理信息系统和地质勘探等领域。
4.四点杆状变形模型基准点:在这个模型中,我们需要选择四个坐标点,其中一个是基准点,另外三个点构成一个杆状形状。
通过测量这个杆状形状在世界坐标系和二维直角坐标系中的长度,我们可以计算出世界坐标系中任意点的坐标值。
这个模型通常适用于测绘工程和地理信息系统等领域。
综上所述,二维直角坐标转换的四种模型基准点分别是三点平面拟合模型基准点、三点高斯-克吕格模型基准点、四点反距离权重插值模型基准点和四点杆状变形模型基准点。
这些基准点在不同的领域中扮演着重要的角色,它们为二维直角坐标的转换提供了可靠的计算依据。
通过选取适当的模型基准点,我们能够准确地将世界坐标系中的点映射到二维直角坐标系中,从而实现地理信息的处理与分析。
两种七参数坐标转换模型的坐标转换精度分析

两种七参数坐标转换模型的坐标转换精度分析目录1. 内容概括 (2)1.1 研究背景 (3)1.2 研究意义 (3)1.3 国内外研究概况 (5)1.4 本文研究内容与方法 (6)2. 两种七参数坐标转换模型 (7)2.1 七参数坐标转换模型简介 (8)2.1.1 模型的基本原理 (9)2.1.2 模型的参数定义 (10)2.2 两种七参数坐标转换模型的比较 (11)2.2.1 模型特性的比较 (12)2.2.2 模型适用条件 (13)3. 坐标转换精度分析方法 (14)3.1 精度分析的目的与要求 (15)3.2 精度分析的方法与工具 (16)3.3 精度分析的评估指标 (18)4. 精度分析实验设计 (19)4.1 实验数据来源 (20)4.2 实验数据的处理 (21)4.3 实验方案与参数设置 (22)5. 两种七参数坐标转换模型的精度分析 (23)5.1 模型A的精度分析 (24)5.1.1 实验结果 (25)5.1.2 分析与讨论 (26)5.2 模型B的精度分析 (28)5.2.1 实验结果 (29)5.2.2 分析与讨论 (31)5.3 两种模型性能对比 (32)1. 内容概括本研究旨在探讨并分析两种不同的七参数坐标转换模型的坐标转换精度。
这两种模型广泛应用于地理信息系统(GIS)和地球科学领域,用于实现不同坐标系统之间的转换。
七参数模型相较于传统的六参数模型多了一个椭球离心率参数,这使得模型在转换过程中能够更好地捕捉和处理地球曲率的影响,因此在高精度定位和地图投影转换中尤为重要。
分析将包括理论推导和数值模拟两部分,理论推导将详细描述两种模型的数学原理和参数意义,为后续的分析提供理论支持。
数值模拟则通过实际数据和对地理空间数据的模拟,对两种模型的坐标转换精度进行量化评估。
我们将通过计算模型转换结果与真实值之间的偏差、残差和相关统计量,比较两种模型的性能,并探讨哪种模型更能准确满足不同的坐标转换需求。
坐标转换原理资料PPT教学课件
墨卡托(Mercator)投影(二)
• 在地图上保持方向和角度的正确是墨卡托投影的优点, 墨卡托投影地图常用作航海图和航空图,如果循着墨 卡托投影图上两点间的直线航行,方向不变可以一直 到达目的地,因此它对船舰在航行中定位、确定航向 都具有有利条件,给航海者带来很大方便。
18
平面坐标转换
• 平面坐标转换
• UTM投影分带方法与高斯-克吕格投影相似,是自西经 180°起每隔经差6度自西向东分带,将地球划分为60 个投影带。
14
高斯-克吕格投影与UTM投影异同(一)
• 高斯-克吕格(Gauss-Kruger)投影与UTM投影(Universal Transverse Mercator,通用横轴墨卡托投影)都是横轴墨卡托 投影的变种。
21
不同(椭球)坐标系的转换流程
空间直角坐标(X,Y,Z)
椭球转换
空间直角坐标(X,Y,Z)
大地坐标(B,L,H) 投影反算 平面直角坐标(x,y,h) 平面转换 当地平面坐标(x,y)
大地坐标(B,L,H) 投影正算
平面直角坐标(x,y,h) 平面转换
当地平面坐标(x,y)
22
不同(椭球)坐标系的转换流程
15
高斯-克吕格投影与UTM投影异同(二)
• 从分带方式看,两者的分带起点不同,高斯-克 吕格投影自0度子午线起每隔经差6度自西向东 分带,第1带的中央经度为3°;UTM投影自西 经180°起每隔经差6度自西向东分带,第1带 的中央经度为-177°,因此高斯-克吕格投影的 第1带是UTM的第31带。
• 设想用一个圆柱横切于球面上投影带的中央经线,按 照投影带中央经线投影为直线且长度不变和赤道投影 为直线的条件,将中央经线两侧一定经差范围内的球 面正形投影于圆柱面。然后将圆柱面沿过南北极的母 线剪开展平,即获高斯一克吕格投影平面。
浅析西安80坐标系向2000国家坐标系的转换
浅析西安80坐标系向2000国家坐标系的转换摘要:本文介绍了1980西安坐标系、2000国家坐标系,坐标转换模型,转换方法,坐标转换注意事项等,并通过实例对坐标转换精度进行了比较。
关键词:坐标系;坐标转换模型;坐标转换方法2000国家大地坐标系是我国为适应现代空间技术发展趋势而自主研究、建立的地心坐标系。
按照国家有关部委的相关通知要求,2018年7月1日后,我国将全面推行使用新的坐标系统--2000国家大地坐标系。
目前,我国使用最为广泛的坐标系系统是西安80坐标系,怎样将西安80坐标转换为2000国家坐标是需要我们解决的问题。
1、坐标系简介1.1、1980西安坐标系1980西安坐标系是一种区域性、二维静态的地球坐标框架,它是传统的大地测量坐标框架,是参心坐标系统的实现。
西安80坐标系以参考椭球几何中心为原点的坐标系,是为了研究局部地球表面的形状,坐标系的建立,是由天文大地网实现和维持的。
大地原点位于我国中部陕西省泾阳县永乐镇。
西安80坐标系的Z轴平行于地球质心指向地极原点方向,大地起始子午面平行于格林尼治平均天文台子午面;X轴在大地起始子午面内与 Z轴垂直指向经度0方向;Y轴与 Z、X轴成右手坐标系。
[1]西安80坐标系常用的几何参数是IUG 1975年大会推荐的,具体见表一:表一西安80坐标系常用几何参数1.2、2000国家坐标系2000国家坐标系是地心坐标系统中的区域性地心坐标框架,是国际地球参考系统的具体实现。
2000国家大地坐标系的定义包括坐标系的原点、三个坐标轴的指向、尺寸以及地球椭球的四个基本参数的定义。
2000国家大地坐标系的原点包括海洋和大气的整个地球质量中心(地心坐标系),2000国家大地坐标系的Z轴由原点指向历元2000.0的地球参考级的方向,该历元的指向由国际时间局给定的历元为1984.0的初始指向推算,定向的时间演化保证相对于地壳不产生残余的全球旋转,X轴由原点指向格林尼治参考子午线与地球赤道面(历元2000.0)的交点,Y轴与Z 轴、X轴构成右手正交坐标系。
控制点坐标转换详细讲解
1、大地控制点分类大地控制点有:a)国家级CORS站点b)2000国家GPS大地控制网点c)国家一、二、三、四等天文大地点d)省级CORS站点e)省市级卫星大地控制网C级、D级点f)其他1954年北京坐标系、1980西安坐标系及相对独立的平面坐标系下的控制点2、控制点用途高等级控制点可用于低等级控制网的外部控制;可用于1954年北京坐标系、1980西安坐标系坐标成果转换为2000国家大地坐标系坐标成果时计算坐标转换参数。
a)国家级CORS站点:可作为省级CORS网建设的控制点。
b)省级CORS站点:可作为省级、市、县城市基础建设控制网点。
c)2000国家GPS大地控制网点:可作为天文大地点控制点及相对独立坐标系建立控制点。
d)省市级卫星大地控制网C级、D级点:相对独立坐标系建立控制点。
e)国家一、二等天文大地点:可作为三、四等天文大地点的控制点使用。
f)国家三、四等天文大地点:可作为测图控制点使用;三等及以上天文大地点坐标成果可作为像控点的起算点。
3、.控制点坐标转换模型(1)不同空间直角大地坐标系间的变换不同地球椭球基准下的空间直角大地坐标系统间点位坐标转换,换算公式为布尔沙模型。
涉及七个参数,即三个平移参数,三个旋转参数和一个尺度变化参数。
(2)不同大地坐标系间变换a)三维七参数坐标转换模型:用于不同地球椭球基准下的大地坐标系统间点位坐标转换,涉及三个平移参数,三个旋转参数和一个尺度变化参数,同时需顾及两种大地坐标系所对应的两个地球椭球长半轴和扁率差。
b)二维七参数转换模型:用于不同地球椭球基准下的椭球面上的点位坐标转换,涉及三个平移参数,三个旋转参数和一个尺度变化参数。
c)三维四参数转换模型:用于局部坐标系间的坐标转换,涉及三个平移参数和一个旋转参数。
d)二维四参数转换模型:用于范围较小的不同高斯投影平面坐标转换,涉及两个平移参数,一个旋转参数和一个尺度参数。
对于三维坐标,需将坐标通过高斯投影变换得到平面坐标,再计算转换参数。
布尔莎七参数坐标转换模型及其编程实现-概述说明以及解释

布尔莎七参数坐标转换模型及其编程实现-概述说明以及解释1.引言1.1 概述布尔莎七参数坐标转换模型是一种用于将不同坐标系下的地理位置进行转换的数学模型。
随着社会的发展和科技的进步,坐标转换在地理信息系统(GIS)、导航系统、测绘工程等领域中变得越来越重要。
本文通过介绍布尔莎七参数坐标转换模型及其编程实现,旨在帮助读者更好地理解和掌握这一模型的原理和实践应用。
文章从概述、正文和结论三个主要部分展开,以便全面而系统地介绍该模型。
在本文的概述部分,我们将首先介绍该模型的概述,包括其基本原理和应用范围。
布尔莎七参数坐标转换模型是一种采用七个参数对坐标进行转换的方法,它可以有效地解决不同坐标系之间坐标转换的问题。
通过了解该模型的基本原理和特点,读者将能够更好地理解接下来的内容。
接着,我们将说明文章的结构安排,以帮助读者更好地理解整篇文章的内容和逻辑。
文章结构包括主要章节的划分和各个章节的内容概述。
通过对文章结构的介绍,读者将能够对整篇文章的内容有一个清晰的把握。
最后,在本部分的目的部分,我们将明确本文的写作目的。
本文的目的是介绍布尔莎七参数坐标转换模型及其编程实现,旨在帮助读者深入了解该模型的原理和方法,并能够通过编程实现来解决实际问题。
通过本文的阅读,读者将能够在实践中灵活应用该模型,并能够为相关领域的研究和应用做出贡献。
综上所述,本文的概述部分对布尔莎七参数坐标转换模型及其编程实现进行了简要介绍。
通过本文的阅读,读者将能够更好地了解该模型的原理和应用,并能够通过编程实现来解决坐标转换问题。
接下来,我们将在正文部分详细介绍布尔莎七参数坐标转换模型及其编程实现的内容。
1.2文章结构1.2 文章结构本文主要介绍了布尔莎七参数坐标转换模型及其编程实现。
文章包括引言、正文和结论三个部分。
在引言部分,首先对布尔莎七参数坐标转换模型进行了概述,介绍了该模型在地理信息系统领域中的重要性和应用场景。
然后,阐述了文章的结构和目的,为读者提供了整篇文章的概览。
如何进行坐标系转换与坐标变换
如何进行坐标系转换与坐标变换在我们的生活中,经常会涉及到坐标系转换与坐标变换的问题。
无论是在地理导航中确定位置,还是在机器人定位中进行路径规划,坐标系转换与坐标变换都扮演着重要的角色。
本文将深入探讨如何进行坐标系转换与坐标变换,并介绍一些常见的应用案例。
一、什么是坐标系转换与坐标变换坐标系转换是指从一个坐标系向另一个坐标系的转换,它是通过一组变换公式将一个点的坐标从一个坐标系转换到另一个坐标系。
坐标变换则是指在同一个坐标系中,通过一定的规则将原始坐标进行变换,以实现特定的目的。
二、坐标系转换的原理与方法1. 坐标系转换原理坐标系转换是基于坐标系的相对关系来实现的。
在进行坐标系转换时,我们需要明确两个坐标系之间的关系,比如它们的原点位置、方向以及坐标轴的长度和单位。
通过这些关系,我们可以建立起坐标系之间的变换公式。
2. 坐标系转换方法坐标系转换的方法有多种,常见的有仿射变换、欧式变换和相似变换等。
仿射变换是一种常用的坐标系转换方法,它保持了原始坐标系上的平行线在转换后仍然保持平行。
通过选择适当的仿射变换矩阵,我们可以将一个点的坐标从一个坐标系转换到另一个坐标系。
欧式变换是另一种常见的坐标系转换方法,它包括平移、旋转和缩放等操作。
通过将原始坐标系中的点进行平移、旋转和缩放等变换,我们可以将其转换到另一个坐标系。
相似变换是欧式变换的一种特殊情况,它保持了原始坐标系上的比例关系。
相似变换通常用于图像处理中,通过将原始图像进行平移、旋转和缩放等操作,可以得到与原图相似的图像。
三、坐标变换的原理与应用1. 坐标变换原理坐标变换是指在同一个坐标系中,通过一定的规则将原始坐标进行变换,以实现特定的目的。
坐标变换可以基于线性代数的原理,通过矩阵运算来实现。
2. 坐标变换的应用案例2.1 地图导航与定位在地图导航与定位中,坐标变换常用于将地理坐标转换为平面坐标,以便进行路径规划和位置确定。
通过选择适当的投影方式和坐标变换公式,我们可以将地球表面上的经纬度坐标转换为平面上的坐标,从而实现地图显示和导航定位。
坐标转换参数求取及坐标转换程序设计

坐标转换参数求取及坐标转换程序设计坐标转换是一种将一个坐标系统中的点转换为另一个坐标系统中的点的过程。
在现实生活中,常常需要将一个点的位置从一个坐标系转换到另一个坐标系,比如将经纬度坐标转换为地图坐标,将平面坐标转换为三维坐标等等。
坐标转换参数求取是指根据已知的转换点的坐标,推导出坐标转换的数学公式或参数。
根据不同的坐标转换需求,可能需要求解不同的参数。
比如,要将经纬度坐标转换为地图坐标,常用的参数有缩放系数、平移系数和旋转角度等。
坐标转换程序设计是指根据已知的坐标转换参数,设计出一个能够实现坐标转换功能的计算机程序或算法。
在设计程序时,需要考虑如何输入和输出坐标数据,如何进行算法实现和优化,以及如何进行错误处理等等。
下面以将经纬度坐标转换为地图坐标为例,介绍坐标转换参数求取及坐标转换程序设计的步骤:1.确定坐标转换的数学模型:经纬度坐标转换为地图坐标常用的数学模型是仿射变换或投影变换。
根据实际需求和转换的精度要求,选择适合的数学模型。
2.收集转换点的坐标数据:选择多个已知的经纬度和地图坐标点进行测量,得到它们在两个坐标系中的坐标数据。
3.利用已知坐标数据求取转换参数:根据数学模型的不同,可以采用不同的方法求取转换参数。
常用的方法有最小二乘法、最大似然估计等。
利用已知的经纬度和地图坐标点,求解出转换参数。
4.设计坐标转换程序:根据所求得的转换参数,设计一个能够实现经纬度到地图坐标转换的程序。
程序的输入可以是经纬度坐标点,输出是地图坐标点。
5.实现程序并进行测试:根据所设计的程序和算法,利用已知的转换点进行测试,验证程序的正确性和精度。
在进行坐标转换参数求取及坐标转换程序设计时1.坐标系的选择:根据实际应用需求,选择合适的坐标系。
不同的坐标系有不同的数学模型和坐标转换参数。
2.数学模型的选择:根据转换的精度要求和应用场景,选择适合的数学模型。
不同的数学模型有不同的转换参数求取方法。
3.数据的准确性和可靠性:收集的已知坐标数据应该具有一定的准确性和可靠性,以确保所求取的转换参数能够有效地进行坐标转换。
关于布尔莎(BURSA)模型坐标转换说明

关于布尔莎(BURSA)模型坐标转换说明标签:坐标高斯转换经纬度bursa2010-05-07 15:13阅读(522)评论(0)布尔莎(Bursa)模型,俗你七参数转换法,是用来转换两个不同椭球之间相应点坐标,因为每个点有坐标和高程,所以最少有三个点才能解算,多余的点要用最小二法求最或然值,不同的软件计算结果略有差别,只要转换模型正确,都是可行的.通过本次矿业权核查工作,因为要涉及到探矿权转换,从54系经纬度转到80系经纬度,通常分以下几步走,首先把54系的经纬度转成54系高斯平面坐标,再把54系高斯平面坐标转成54系空间直角坐标,通过七参数转成80系空间直角坐标,再转成80系高斯平面坐标,最后再转成80系经纬度.为了计算方便,<空间数据处理系统3.2版>免费版提供了直接从54系经纬度转到80系经纬度,但还有个别单位不会用,用其他软件转换,走了不少弯路,耽误了很多时间,而且结果也转错了.[图示如下]正确的使用方法:打开<空间数据处理系统3.2版>免费版,找到[转换]菜单下的[不同椭球坐标转换],选择原坐标系统和新坐标系统,导入公用点文件或直接双击表格内空白处,输入公共点坐标,等所有公共点输入完毕,设置好中央子午线,单位为:度.分秒,点击[参数计算],在右边框内显示七参数计算结果,此时可以保存转换参数,下次再用不用重新计算,再选择计算类型,两边都选择大地坐标,注意下面标题会自动变化,然后在左边框内输入要转换点的经纬度,单位:度.分秒,点击[转换坐标],即显示新坐标系统下的经纬度.其他说明:1、七参数是两个椭球的转换参数,一旦求出转换参数,就不用再求了,可随意转换成经纬度或高斯平面坐标或空间直角坐标,都是一个点的不同表达形式,也就是说不管坐标类型是什么样式,都代表同一个点;2、不管转换前是6度带还是3度带成果,直接输入中央子午线即可,转换到那个带都可以,只需要改变新椭球中央子午线经度即可.不要求转换前后中央子午线完全一致,这给用户提供了很大方便,不需要再换带等操作.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
坐标转换札记之坐标转换模型
一、二维七参数转换模型
2222sin cos ""0cos cos sin cos sin sin cos """0cos sin 1sin cos 0sin cos "00(2sin )sin cos "1x y z L L X L N B N B Y B B L B L B Z M M M tgB L tgB L m N L L e B B M
N e B e B B Ma ρρρρρεερερ⎡⎤∆⎡⎤-⎢⎥∆⎡⎤⎢⎥=∆+⎢⎥⎢⎥⎢⎥∆⎣⎦⎢⎥--⎢⎥∆⎣⎦
⎢⎥⎣⎦⎡⎤⎡⎤-⎡⎤⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥--⎣⎦⎢⎥⎣⎦⎣⎦+--sin cos "a B B f f ρ⎡⎤∆⎡⎤⎢⎥⎢⎥⎢⎥∆⎣⎦⎢⎥⎣⎦
其中:
,B L ∆∆ 同一点位在两个坐标系下的纬度差、经度差,单位为弧度, ,a f ∆∆ 椭球长半轴差(单位米)、扁率差(无量纲),
,,X Y Z ∆∆∆ 平移参数,单位为米,
,,x y z εεε 旋转参数,单位为弧度,
m 尺度参数(无量纲)。
二、平面四参数转换模型
属于两维坐标转换,对于三维坐标,需将坐标通过高斯投影变换得到平面坐标再计算转换参数。
平面直角坐标转换模型:
⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-++⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡110022cos sin sin cos )1(y x m y x y x αααα
其中,x0,y0为平移参数,α为旋转参数,m 为尺度参数。
x2,y2为目标大地坐标系下的平面直角坐标,x1,y1为原坐标系下平面直角坐标。
坐标单位为米。
三、综合法坐标转换
所谓综合法即就是在相似变换(Bursa 七参数转换)的基础上,再对空间直角坐标残差进行多项式拟合,系统误差通过多项式系数得到消弱,使统一后的坐标系框架点坐标具有较好的一致性,从而提高坐标转换精度。
综合法转换模型及转换方法:
利用重合点先用相似变换转换
Bursa 七参数坐标转换模型
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡∆∆∆=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡S S S S S S Z Y X S
S S S
S S T T T Z Y X Z Y X m X Y X Z Y Z Z Y X Z Y X εεε000 式中,3个平移参数[]T Z Y X
∆∆∆,3个旋转参数[]T Z Z X εεε和1个尺度参数
m 。
对相似变换后的重合点残差Z Y X V V V ,,采用多项式拟合
∑∑==-=K i i j j S
j i S ij Z Y X L B a V V V 00或或
式中:B ,L 单位:弧度;K 为拟合阶数;ij a 为系数,通过最小二乘求解。
四、三维七参数坐标转换模型
2222sin cos ""0()cos ()cos sin cos sin sin cos """()()()cos cos sin sin sin (1)(1)cos sin 1()sin L L X L N H B N H B Y B B L B L B M H M H M H Z H B L B L B N e H N e H tgB L tgB L N H N H N H Ne B ρρρρρ⎡⎤-⎢⎥∆∆++⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=∆+∆⎢⎥⎢⎥⎢⎥--⎢⎥+++⎢⎥⎢⎥∆∆⎣⎦⎣⎦
⎢⎥⎢⎥⎣⎦
-+-+-+++--222222222222()sin 0sin cos 0sin cos sin sin cos cos 0sin cos "()sin 00(2sin )sin cos "sin cos "1(1sin )(11x y z B N H Ne B L L M H M H Ne B B L Ne B B L N e B B m M N H Ne e B N B B e B B f Ma N M e B a a εεερρρ⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥+-⎢⎥⎢⎥⎢⎥⎢⎥++⎣⎦⎢⎥-⎢⎥⎣⎦
⎡⎤⎢⎥⎢⎥-+⎢⎥⎢⎥+-⎣⎦
-+-----222sin )sin a f e B B ⎡⎤⎢⎥⎢⎥∆⎡⎤⎢⎥⎢⎥∆⎣⎦⎢⎥⎢⎥⎢⎥⎣⎦
,,B L H ∆∆∆ 同一点位在两个坐标系下的纬度差、经度差、大地高差,经纬度差单位为弧度,大地高差单位为米,
1803600/ρπ=⨯ 弧度秒
a ∆ 椭球长半轴差,单位为米, f ∆ 扁率差,无量纲, ,,X Y Z ∆∆∆ 平移参数,单位为米, ,,x y z εεε
旋转参数,单位为弧度, m 尺度参数,无量纲。