第4章机器人动力学
合集下载
第四章机器人静力学动力学
0
nz
(
p
n
)
y
(
p
o
)
y
( p a)y
ox
oy
oz
( ( (
p p p
n)
o)
a)
ax
z z z
dx dy dz
x
ay
y
az z
{T}
根据前面导出的两坐标系{A}和{B}之间广义速度的坐标变换 关系,可以导出{A}和{B}之间广义操作力的坐标变换关系。
l1s1
l2s12
于是得到与末端速度
相应的关节速度:
显然,当θ2趋于0°(或180°)时,机械手接近奇异形位,相应的 关节速度将趋于无穷大。
4.2 机器人的静力学
0F [Fx , Fy ]T
存在怎样的关系
(1, 2 )
( f ,n)
y0
2
1
x0
机器人与外界环境相互作用时,在接触的地方要产生力 和 力矩 ,统称为末端广义(操作)力矢量。记为
n个关节的驱动力(或力矩)组成的n维矢量 称为关节力矢量
利用虚功原理,令各关节的虚位移为δqi ,末端执行器相应 的虚位移为D。根据虚位移原理,各关节所作的虚功之和与末端 执行器所作的虚功应该相等,即
简写为: 又因为
, 所以得到 与 之间的关系
式中
称为机械手的力雅可比。它表示在静态平衡状态下,
操作力向关节力映射的线性关系。
x t33
x t34
dx
x x x x
t
41
t42
t43
t44
x x x x
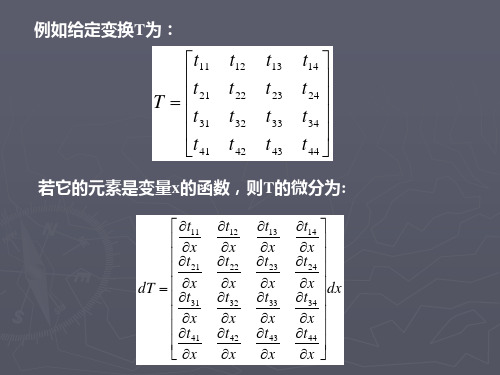
二. 微分运动
设机器人某一杆件相对于基坐标系的位姿为T,经过微运动 后该杆件相对基坐标系的位姿变为T+dT,若这个微运动是相对 于基坐标系(静系)进行的(右乘),总可以用微小的平移和旋转 来表示,即
第四章__机器人动力学ppt课件
pdii1npzii1opzji1apzk
pi 0i0j0k
§ 4.2 机械手动力学方程
n
Dij Tra(TcpepjIppiTpT) pmai,xj
n
mp piTkppjpdi•pdjprp(pdipjpdjpj)
pmai,xj
其中 kp
kkp2p2xxxy
kp2xz
kp2xy k2
pyy
力矩T1和T2的动力学表达式的一般形式和矩阵表达式为: T 1 D 1 1 1 D 1 2 D 1 1 1 2 1 D 1 2 2 2 2 D 1 1 1 2 2 D 1 2 2 1 1 D 1 (4.1-8) T 2 D 2 1 1 D 2 2 D 2 1 1 2 1 D 2 2 2 2 2 D 2 1 1 2 2 D 2 2 2 1 1 D 2 (4.1-9)
n
D i i m pp i 2 T x k p 2 x p i 2 x T y k p 2 y p i 2 y T z k p 2 zp d z i • p d i 2 p r p • ( p d i p i)
p m i ,jax
如果为旋转关节
n
D i i m p n 2 p T k p 2 x o x 2 p T k x p 2 y a y 2 p T k y p 2 z z p p • z p p 2 p r p • ( p p • n p ) i ( p p • o p ) j ( p p • a p ) k
惯量项和重力项在机器人的控制中特别重要,它们影响到系统的稳定性 和定位精度。向心力和哥氏力仅当机器人高速运动时才有意义。
§ 4.2 机械手动力学方程
4.2.2 动力学方程的简化
1 惯量项Dij的简化
第四章(机器人学动力学)

机器人动力学
第四章 机器人静力学和动力学
静力学和动力学分析,是机器人操作机设计和动态性能分 析的基础。特别是动力学分析,它还是机器人控制器设计、 动态仿真的基础。 机器人静力学研究机器人静止或缓慢运动式,作用在机器 人上的力和力矩问题。特别是当手端与环境接触时,各关节 力(矩)与接触力的关系。 机器人动力学研究机器人运动与关节驱动力(矩)间的动 态关系。描述这种动态关系的微分方程称为动力学模型。由 于机器人结构的复杂性,其动力学模型也常常很复杂,因此 很难实现基于机器人动力学模型的实时控制。然而高质量的 控制应当基于被控对象的动态特性,因此,如何合理简化机 器人动力学模型,使其适合于实时控制的要求,一直是机器 人动力学研究者追求的目标。 2
3
按静力学方法,把这些力、力矩简化到 Li 的固联坐标系 oi xi yi zi ,可得: Fi Fi 1 G i M i M i 1 r i F i 1 r Ci G i i 1 或 i i i 0
4.1 机器人静力学
一、杆件之间的静力传递 在操作机中,任取两连杆 Li, i 1 。设在杆 Li 1上的 Oi 1 点 L 作用有力矩 M i 1和力 F i 1;在杆 Li 上作用有自重力 G i 〔过质 r 心 Ci );i 和 rCi 分别为由 Oi 到 Oi 1 和 Ci 的向径。 M i 1 F i 1
18
4.4.4 牛顿——欧拉法基本运动方程
刚体的运动可分解为随质心的移动和绕质心的转动。借助于 杆件运动学知识,我们把达朗贝尔原理用于每个杆件,描述机 器人各杆件的运动。达朗贝尔原理可应用于任意瞬时,它实质 上是牛顿第二运动定律的一种变型,可表示为: d mi vi ( Fi ) Fi mi vi 牛顿定理 : dt d I ii Ni I ii i ( I ii ) 欧拉方程 : ( Ni ) dt 式中:mi — 杆i 质量; Fi — 杆i上所有外力合力; N i — 杆i上所有外力对质心的合力矩;
第四章 机器人静力学和动力学
静力学和动力学分析,是机器人操作机设计和动态性能分 析的基础。特别是动力学分析,它还是机器人控制器设计、 动态仿真的基础。 机器人静力学研究机器人静止或缓慢运动式,作用在机器 人上的力和力矩问题。特别是当手端与环境接触时,各关节 力(矩)与接触力的关系。 机器人动力学研究机器人运动与关节驱动力(矩)间的动 态关系。描述这种动态关系的微分方程称为动力学模型。由 于机器人结构的复杂性,其动力学模型也常常很复杂,因此 很难实现基于机器人动力学模型的实时控制。然而高质量的 控制应当基于被控对象的动态特性,因此,如何合理简化机 器人动力学模型,使其适合于实时控制的要求,一直是机器 人动力学研究者追求的目标。 2
3
按静力学方法,把这些力、力矩简化到 Li 的固联坐标系 oi xi yi zi ,可得: Fi Fi 1 G i M i M i 1 r i F i 1 r Ci G i i 1 或 i i i 0
4.1 机器人静力学
一、杆件之间的静力传递 在操作机中,任取两连杆 Li, i 1 。设在杆 Li 1上的 Oi 1 点 L 作用有力矩 M i 1和力 F i 1;在杆 Li 上作用有自重力 G i 〔过质 r 心 Ci );i 和 rCi 分别为由 Oi 到 Oi 1 和 Ci 的向径。 M i 1 F i 1
18
4.4.4 牛顿——欧拉法基本运动方程
刚体的运动可分解为随质心的移动和绕质心的转动。借助于 杆件运动学知识,我们把达朗贝尔原理用于每个杆件,描述机 器人各杆件的运动。达朗贝尔原理可应用于任意瞬时,它实质 上是牛顿第二运动定律的一种变型,可表示为: d mi vi ( Fi ) Fi mi vi 牛顿定理 : dt d I ii Ni I ii i ( I ii ) 欧拉方程 : ( Ni ) dt 式中:mi — 杆i 质量; Fi — 杆i上所有外力合力; N i — 杆i上所有外力对质心的合力矩;
《机器人技术基础》第四章 机器人动力学

人
4.2 机械手动力学方程
动
力
学
4.1.1 拉格朗日方法
机器人是一个具有多输入和多输出的复杂的 运动学系统,存在严重的非线性,需要非常复杂 的方法来处理。
动力学处理方法: Lagrange , Newton-Euler, Gauss,Kane, Screw, Roberson-Wittenburg
2 )
d
dt
L
1
(m1 m2 )l12
m2l22
2m2l1l2
cos
2
1
(
m2
l
2 2
m2l1l2 cos 2 )2
2m2l1l2 si n212 m2l1l2 si n22L1Fra bibliotek(m1
m2 )gl1
s i n1
m2 gl2
s i n (1
2)
4.1.2 拉格朗日方程
⑤求出机器人动力学方程:
)
然后求微分,则其速度就为:
x2 y 2
l1 l1
co s11 sin 11
l2 l2
cos(1 2 )(1 2 ) sin(1 2 )(1 2 )
θ1
关节2
m1
(x1, y1)
l2
θ2 m2
(x2, y2 )
由此可得连杆的速度平方值为:
v22 x22 y22 l1212 l22(12 212 22 ) 2l1l2 cos2(12 12 )
m2 gl2 sin(1 2 )
T2 (m2l22 m2l1l2 cos2 )1 m2l222 m2l1l2 sin 21
m2 gl2 sin(1 2 )
4.1.2 拉格朗日方程
将得到的机器人动力学方程简写为如下形式:
工业机器人课件第四章 机器人动力学

(4.2-2) Dii I ai I ai 为传动装置的等效转动惯量
Dij Dijk
p maxi , j
n
I ai
Trace(
Tp q j
Ip
TpT qi Ip
) TpT qi
(4.n T T p T
n
Trace(
2Tp q j qk rp
把相应的偏导和导数代入拉格朗日方程,可求得力矩T1和T2的动力学表达式 d L L T1 dt 1 1 (m d 2 m d d cos ) [(m m )d 2 m d 2 2m d d cos ]
1 2 1 2 2 2 1 2 2 1 2 2 2 1 2 2 2
(4.1-9)
(4.1-10)
将在关节i上产生 D 的惯性力; Dii—关节i的有效惯量:关节i的加速度 i ii i 将在关节j和i上分别产 和 Dij—关节i和j的耦合惯量:关节i和j的加速度 j i 生一个等于 Diji 和 Dij j 的惯性力;
2 D22 m2 d 2
耦合惯量 向心加速度 系数
2 D12 m2 d2 m2 d1d2 cos2
D111 0 D122 m2 d1d 2 sin 2 D211 m2 d1d 2 sin 2 D222 0
哥氏加速度 系数
重力项
D112 D121 m2 d1d 2 sin 2 D212 D221 0
) (4.2-4)
(4.2-5)
Di m p g
p i
p
qi
惯量项和重力项在机器人的控制中特别重要,它们影响到系统的稳定 性和定位精度。向心力和哥氏力仅当机器人高速运动时才有意义。
第4章 机器人的动力学初步

图4-4 质点平移运动 作为回转运动的解析
机器人的静力学
如果I =mr2,则式(4-14) 就改写为
式(4-15)是 质 点 绕 固 定 轴 进 行 回 转 运 动 时 的 运 动 方 程 式 。 与 式 (4⁃ 11)比较,I相当于平移运动时的质量,在旋转运动中称为惯性矩。
机器人的静力学
对于质量连续分布的物体, 求解其惯性矩, 可以将其分割成假想的微小 物体, 然后再把每个微小物体的惯性矩加在一起。这时, 微小物体的质量d m 及其微小体积dV 的关系, 可用密度ρ 表示为 所以, 微小物体的惯性矩dI, 依据I =mr2, 可以写成
行器在笛卡尔空间的轨迹已确定(轨迹已被规划),求解机器人各执行器的驱
动力或力矩,这称为机器人动力学方程的反面求解,简称为逆动力学问题。
概述
不管是哪一种动力学问题都要研究机器人动力学的数学模型,区别在于问
题的解法。人们研究动力学的重要目的之一是对机器人的运动进行有效控制,
以实现预期的运动轨迹。 常用的方法有牛顿.欧拉法、拉格朗日法、凯恩动力学法等。牛顿·欧拉动
原理。
机器人的静力学
如图4⁃1所示,已知作用在杠杆一端的力FA,试用虚功原理求作用于另 一端的力FB。假设杠杆长度LA和LB已知。 按照虚功原理,杠杆两端受力所做的虚功应该是
式中,δ xA 、δ xB是杠杆两端的虚位移。而就虚位移来讲,下式成立
式中, δθ 是绕杠杆支点的虚位移。 把式(4⁃2)代入式(4⁃1)消 δ xA 、δ xB,可得到下式 图4-1 杠杆及作用在两端上的力
机器人动力学方程式
式中, n 为机器人的关节总数。其次我们来考虑把K 作为机器人各关节 速度的函数。这里vCi与ω i 分别表示为
《机器人动力学》课件
机器人动力学有助于优化机器人的设 计和性能,提高机器人的运动性能和 作业能力。
安全性和稳定性
通过机器人动力学的研究,可以预测 机器人在不同环境和操作条件下的行 为,从而避免潜在的危险和保证机器 人的安全稳定运行。
机器人动力学的发展历程
初始阶段
早期的机器人动力学研究主要关注于简单的机械臂模型,采用经典力学理论进行分析。
刚体动力学是研究刚体在力作用下的运动规律的科学。刚体动力学建模
是研究刚体运动过程中力和运动状态之间的关系。
02
牛顿-欧拉法
牛顿-欧拉法是一种基于牛顿运动定律和欧拉方程的刚体动力学建模方
法。通过这种方法,可以建立刚体的运动方程,描述刚体的运动状态。
03
拉格朗日法
拉格朗日法是一种基于拉格朗日方程的刚体动力学建模方法。这种方法
《机器人动力学》ppt 课件
目录
Contents
• 机器人动力学概述 • 机器人动力学的基本原理 • 机器人动力学建模 • 机器人控制中的动力学应用 • 机器人动力学研究的挑战与展望 • 机器人动力学实验与案例分析
01 机器人动力学概述
定义与特点
定义
机器人动力学是研究机器人运动过程中力和运动状态之间关系的学科。它主要关注机器人在操作物体 、环境交互以及自身运动过程中产生的力和扭矩,以及这些力和扭矩如何影响机器人的运动状态。
在实际应用中的表现。
06 机器人动力学实验与案例分析
实验一:刚体动力学实验
总结词
理解刚体动力学基本原理
详细描述
通过实验一,学生将学习刚体动力学 的基本原理,包括刚体的运动学和动 力学特性。实验将通过演示刚体在不 同条件下的运动,帮助学生理解刚体 动力学的概念和应用。
第4讲 机器人动力学

2 2 T PC 1 PC 1 L C 1 1
(4-12)
2 2 2 2 2 T p C 2 p C 2 L1 1 L C 2 ( 1 2 ) 2 L1 L C 2 C 2 ( 1 1 2 )
(4-13) 利用式(4-10)和式(4-12),(4-13),通过下式
对于一般形式的连杆,由于I除第三分量以外,其它分 量皆不为零,所以×I不是零向量。×I的第1,2分量成 了改变轴方向的力矩,但在固定轴的场合,与这个力矩平衡 的约束力生成,式N的第1,2分量,不产生运动。 由于机器人是具有分布质量的三维、多自由度机构,利 用牛顿力学建模非常困难,拉格朗日力学成为主要的动力学 分析方法。
式中,m(标量)是刚体的质量; 3 3 IC R 是绕重心C的惯性矩阵;FC 是作用于重心的平动力;N是惯性力矩; Vc是重心的平移速度;为角速度。 式(4-3)及式(4-4)分别被称为牛顿运动方程式及欧 拉运动方程式。Ic的各元素表示对应的力矩元素和角加速度元 素间的惯性矩。
2012-7-16
r x
2012-7-16
F
N r
机器人技术公共选修课
6
1. 惯性矩
x 式中, 和N是绕轴回转的角加速度和惯性力矩,将 和F 代入上式得: 2 mr N
令 I mr
2
,上式可以变为:
N I
(4-1)
式(4-1)是质点绕固定轴进行回转运动时的运动方程式, I相当于平动时的质量,称为惯性矩。 求质量连续分布物体的惯性矩时,可以将其分割成假想的 微小物体,然后将微小物体的惯性矩加在一起,这时,微小物 体的质量dm及其微小物体体积dV的关系可用密度表示为:
(4-12)
2 2 2 2 2 T p C 2 p C 2 L1 1 L C 2 ( 1 2 ) 2 L1 L C 2 C 2 ( 1 1 2 )
(4-13) 利用式(4-10)和式(4-12),(4-13),通过下式
对于一般形式的连杆,由于I除第三分量以外,其它分 量皆不为零,所以×I不是零向量。×I的第1,2分量成 了改变轴方向的力矩,但在固定轴的场合,与这个力矩平衡 的约束力生成,式N的第1,2分量,不产生运动。 由于机器人是具有分布质量的三维、多自由度机构,利 用牛顿力学建模非常困难,拉格朗日力学成为主要的动力学 分析方法。
式中,m(标量)是刚体的质量; 3 3 IC R 是绕重心C的惯性矩阵;FC 是作用于重心的平动力;N是惯性力矩; Vc是重心的平移速度;为角速度。 式(4-3)及式(4-4)分别被称为牛顿运动方程式及欧 拉运动方程式。Ic的各元素表示对应的力矩元素和角加速度元 素间的惯性矩。
2012-7-16
r x
2012-7-16
F
N r
机器人技术公共选修课
6
1. 惯性矩
x 式中, 和N是绕轴回转的角加速度和惯性力矩,将 和F 代入上式得: 2 mr N
令 I mr
2
,上式可以变为:
N I
(4-1)
式(4-1)是质点绕固定轴进行回转运动时的运动方程式, I相当于平动时的质量,称为惯性矩。 求质量连续分布物体的惯性矩时,可以将其分割成假想的 微小物体,然后将微小物体的惯性矩加在一起,这时,微小物 体的质量dm及其微小物体体积dV的关系可用密度表示为:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二连杆机械手系统的总动能和总位能分别为:
K K1 K2
1 2
(m1
m2 )d1212
1 2
m2
d
2 2
(1
2 )
2
m2 d1d 2
cos 2 (12
12 )
(4.3)
P P1 P2
(m1 m2 )gd1 cos1 m2 gd2 cos(1 2 )
(4.4)
4.1 刚体动力学
7
4.1.2 动力学方程的两种求法
2
4.1.1 刚体的动能与位能KFra bibliotek1 2
M1 x&12
1 2
M0 x&02
P
1 2
k( x1
x0 )2
M1 gx1
M
0 gx0
D
1 2
c(
x&1
x&0 )2
错误!
W Fx1 Fx0
F
x0
F
x1
k
c
M0
图4.1 一般物体的动能与位能
4.1 刚体动力学
3
4.1.1 刚体的动能与位能
x 0, x1 为广义坐标
4
4.1.1 刚体的动能与位能
x0 0, x0和x1均为广义坐标,有下式:
M1 x1 c( x1 x0 ) k( x1 x0 ) M1 g F M 0 x0 c( x1 x0 ) k( x1 x0 ) M 0 g F
或用矩阵形式表示为:
M1
0
0 M0
x1 x0
连杆代号,n为连杆数目。
4.1 刚体动力学
12
牛顿-欧拉动态平衡法
质量 m1和m2的位置矢量 r1和r(2 见图4.3)为:
y
r1 r0 (d1 cos1 )i (d1 sin1 ) j (d1 cos1)i (d1 sin1) j
v1
T1
x
d1
r2 r1 [d2 cos(1 2 )]i [d2 sin(1 2 )] j
cos 2
D22
m2
d
2 2
耦合惯量
D12
m2
d
2 2
m2d1d2
cos 2
m2
(d
2 2
d1d2
cos 2 )
向心加速度系数
D111 0
D122 m2d1d 2 sin 2 D211 m2d1d 2 sin 2
D222 0
4.1.2 动力学方程的两种求法
9
拉格朗日功能平衡法
哥氏加速度系数 D112 D121 m2d1d2 sin 2
机器人学基础
1
4.1 刚体动力学
拉格朗日函数L被定义为系统的动能K和位能P之
差,即:
LKP
(4.1)
系统动力学方程式,即拉格朗日方程如下:
Fi
d dt
L qi
L qi
,i
1,2,
n
(4.2)
式中,q i 为表示动能和位能的坐标,qi为相应的速 度,而Fi为作用在第i个坐标上的力或是力矩。
第四章 机器人动力学
D212 D221 0
重力项
D1 (m1 m2 )gd1 sin1 m2 gd2 sin(1 2 ) D2 m2 gd2 sin(1 2 )
4.1.2 动力学方程的两种求法
10
拉格朗日功能平衡法
表4.1给出这些系数值及其与位置 2的关系。
负 载
2
cos 2
表4.1
D11
D12
D22
[m2
d
2 2
m2 d1d 2
cos 2 ]2
c11
(2m2 d1d 2
sin 2 )12
(m2d1d2 sin 2 )22 [(m1 m2 )gd1 sin1 m2d2 g sin(1 2 )] (4.12)
I1
If
地 0
1
6
2
1
6
2
面 90
0
4
1
1
4
3
空 180
-1
2
0
1
2
2
载 270
0
4
1
1
4
3
地 0
1
18
8
面 90
0
10
4
满 180
-1
2
0
载 270
0
10
4
4
18
2
4
10
6
4
2
2
4
10
6
外 空 间 负 载
0 90 180 270
1 0 -1 0
402
200
100
402
2
202
100
100
202 102
拉格朗日功能平衡法
二连杆机械手系统的拉格朗日函数L为:
LKP
1 2
(m1
m2 )d1212
1 2
m2
d
2 2
(12
212 22 )
m2d1d2 cos 2 (12 12 ) (m1 m2 )gd1 cos1 m2 gd2 cos(1 2 )
求得力矩的动力学方程式:
(4.5)
T1 T2
第四章 机器人动力学
分析机器人操作的动态数学模型,主要采用 下列两种理论:
动力学基本理论,包括牛顿—欧拉方程。 拉格朗日力学,特别是二阶拉格朗日方程。
对于动力学,有两个相反的问题:
其一是已知机械手各关节的作用力或力矩,求各 关节的位移、速度和加速度,求得运动轨迹。 其二是已知机械手的运动轨迹,即各关节的位移、 速度和加速度,求各关节所需要的驱动力或力矩。
D11
D21
D12 D22
12
D111 D211
D122 D222
1222
D112
D212
D121 D221
1221
D1 D2
(4.10)
4.1 刚体动力学
8
拉格朗日功能平衡法
比较可得本系统各系数如下:
有效惯量
D11
(m1
m2 )d12
m2
d
2 2
2m2 d1d 2
2
0
100
2
2
202
100
100
202 102
4.1.2 动力学方程的两种求法
11
4.1.2 动力学方程的两种求法
牛顿-欧拉动态平衡法 错误!
二连杆系统的动力学方程的一般形式为:
W d K K D P
,i 1,2, n
qi dt qi qi qi qi
(4.11)
式中的W、K、D、P和qi等的含义与拉格朗日法一样;i为
θ1
v2
r1 m1 T2
d2
[d1 cos1 d2 cos(1 2 )]i [d1 sin1 d2 sin(1 2 )] j
θ2
r2
m2
图4.3 二连杆机械
4.1.2 动力学方程的两种求法
13
2.牛顿-欧拉动态平衡法
可得:
T1
[(m1
m2 )d12
m2
d
2 2
2m2 d1d 2
cos 2 ]1
c c
c
c
x1 x0
k k
k
k
x1
x
0
F F
4.1 刚体动力学
5
4.1.1 刚体的动能与位能
二连杆机械手的动能和位能
y
T1
x
d1
θ1 (x1, y1)
m1
T2
d2
g
θ2
m2
(x2, y2)
图4.2 二连杆机器手(1)
4.1 刚体动力学
6
4.1.1 刚体的动能与位能
d dt
K x1
K x1
D
x1
P x1
W x1
其中,左式第一项为动能随速度(或角速度) 和时间的变化;第二项为动能随位置(或角度) 的变化;第三项为能耗随速度变化;第四项为 位能随位置的变化。右式为实际外加力或力矩。 表示为一般形式:
M1 x1 c1 x1 dx1 F M1 g
4.1 刚体动力学