BPW自动调整臂安装说明(2017-12)(1)(1)
2、(BPW)空气悬挂、盘式制动器和制动间隙自动调整臂

空气悬挂
空气悬挂使用误区
误区一
空气悬挂具有很好的减震性能,所以有的用户会产生误解,比如说道路 条件比较差,为了提高货物的保护,采用空气悬挂,结果货物保护了,悬 挂系统故障频发。实际上,这就好比奔驰S级轿车舒适性一流,但是在土路 和爬山的时候,悬架零件容易损坏,故障比较多,绝对不如奔驰G级。其实, 挂车的空气悬挂也是如此。
Weitergabe sowie Vervielfältigung dieser vertraulichen Unterlage(n), Verwertung und Mitteilung ihres Inhalts ist nicht ohne vorherige schriftliche Genehmigung gestattet. Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte für den Fall der Patenterteilung oder Gebrauchsmuster-Eintragung vorbehalten.
盘式制动器
盘式制动器的特点
货运汽车盘式制动器发展的过程基本上与轿车制动系统的发展过程 类似。早期轿车也是以鼓式制动器为主,后来随着公路条件的进步和改 善,开始在高级轿车上出现盘式制动器,当时的卖点就是盘式制动器制 动反应快,制动力上升迅速,制动间隙免调整。到现在轿车盘式制动器 使用非常普遍了。 挂车随着现代物流的发展,盘式制动器也开始大规模推广。 BPW是比较早推出盘式制动器车轴的企业,与奔驰卡车基本同时在市 场上开始销售。BPW盘式制动器规格齐全,性能稳定,在全球范围内有 广泛的应用。
Weitergabe sowie Vervielfältigung dieser vertraulichen Unterlage(n), Verwertung und Mitteilung ihres Inhalts ist nicht ohne vorherige schriftliche Genehmigung gestattet. Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte für den Fall der Patenterteilung oder Gebrauchsmuster-Eintragung vorbehalten.
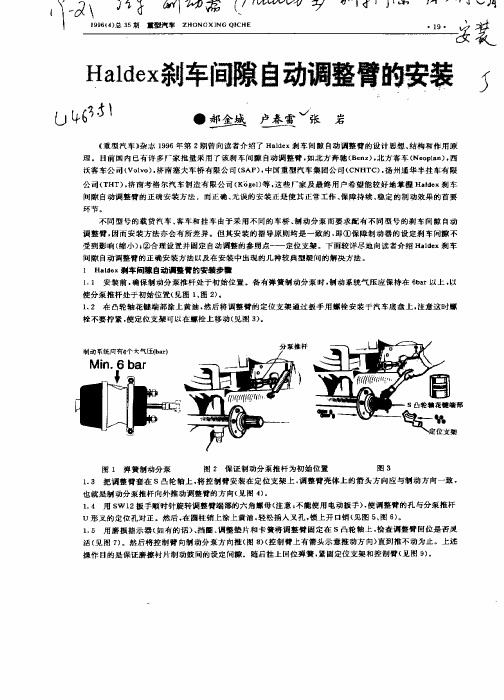
Haldex刹车间隙自动调整臂的安装
14 用 S 1 . W 2扳手顺 时 针旋转 调整 臂端部 的六 角螺 母 ( 注意 : 能使 用 电动扳手 ) 使调 整臂 的孔 与分 泵推 杆 不 ,
U形 叉的 定位孔 对正 。然后 , 在圆 柱销上 涂上黄 油 , 轻松插 入叉 孔 , 锁上 开 口销 ( 见图 5 图 6 。 、 )
( 本产 品巳在 国 内申请专 利 , 专利号 为 0 4 9 , ) 621 3 4 4
动效 果 非常满 意 . 明 Had x自动调 整臂 完全适 合 中国的道 路状 况和行 驶条 件 证 le
1 5 用 磨损 指 示器 ( . 如有 的话 ) 挡 圈 、 、 调整 垫 片和 卡 簧将 调 整臂 固定 在 S凸轮 轴 上 , 查调 整臂 回位 是否灵 检 活 ( 图 7 。然后 将控 制臂 向制 动分 泵方 向推 ( 8 ( 制臂 上有 箭头 示意 推动 方 向) 见 ) 图 )控 直到 推不 动为 止 。上述 操 作 目的是保证 磨擦 衬片制 动鼓 问的设 定 间豫 。随后挂 上 回位弹 簧 , 固定位 支架 和控制 臂 ( 图 9 。 紧 见 )
《 重型 汽 车 》 志 1 9 杂 9 6年 第 2期 曾 向读 者介 绍 了 Had x刹车 间 隙 自动调 整臂 的设 计 思想 、 构和 作用 原 le 结 理 。目前 国 内 已有 许 多厂家 批 量 采用 了该 刹 车 间豫 自动 调整 臂 . 北方 奔 驰 ( e z . 如 B n ) 北方 客 车 ( o ln . Ne pa ) 西
沃客车 公 司( ov ) 济南 塞夫 车桥 有 限公 司 ( AF) 中 国重 型 汽车 集团 公司 ( NHT ) 扬州 通华 半挂 车有 限 V lo , S , C C, 公 司 ( HT) 济 南考 格 尔汽 车 制造 有 限公 司 ( g 1等 . 些 厂家 及 最终 用户 希望 能 较好 地 掌握 Had x刹 车 T . K e) 这 le 间隙 自动调 整臂 的正 确安 装方 法 而正 确 、 无误 的安 装正 是使 其 正常 工作 、 障持 续 、 定 的制 动效果 的首 要 保 稳
BE SAFE Ranger 杠杆挽扳杆提升机说明书

NO RETURNS, CREDITS OR EXCHANGES FOR:
• Returned items that failed due to an accident, purchaser’s abuse, neglect or failure to operate in accordance with instructions provided in the owner’s manual(s) supplied.
• Returned items that are incomplete or defaced. • Any consumable or standard wear items. • Returned items with a different serial number from
what was authorized for return. • Returned items that do not include your original
BE SAFE Ranger™ Floor Jacks are designed and built with safety in mind. However, proper training and thoughtful operation on the part of the operator can increase your overall safety. DO NOT operate or repair this equipment without reading this manual and the important safety instructions shown inside.
自动化机械臂P5G系列夹紧器用户操作手册说明书

Automation ActuatorDivisionTABLE OF CONTENTS1. INSPECTION AND REPLACEMENT PROCEDURE FOR 30 DEGREE ANGULAR GRIPPER.(A) FOR PROX OPTIONS SEE SECTION 2C.2. INSPECTION AND REPLACEMENT PROCEDURE FOR 180 DEGREE ANGULARGRIPPER.(A) STROKE ADJUST FRONT.(B) STROKE ADJUST REAR.(C) PROXIMITY OPTIONS.3. INSPECTION AND REPLACEMENT PROCEDURE FOR PARALELL GRIPPER.(A) FUNCTION DRAWINGS.(B) STROKE ADJUST FRONT.(C) STROKE ADJUST REAR.(D) PROXIMITY OPTIONS.4. FASTENER TORQUE TABLES.DRAWING INDEXDRAWING 1: STANDARD 30 DEG ANGULAR GRIPPER.DRAWING 2: STANDARD 180 DEG ANGULAR GRIPPER.DRAWING 3: STANDARD 180 DEG ANGULAR GRIPPER, STROKE ADJUST FRONT.DRAWING 4: STANDARD 180 DEG ANGULAR GRIPPER, STROKE ADJUST REAR.DRAWING 5: STANDARD 30/180 DEG ANGULAR GRIPPER, PROXIMITY OPTIONS.DRAWING 6: STANDARD PARALELL GRIPPERDRAWING 7: STANDARD PARALELL GRIPPER, STROKE ADJUST FRONT.DRAWING 8: STANDARD PARALELL GRIPPER, STROKE ADJUST REAR.DRAWING 9: STANDARD PARALELL GRIPPER, PROXIMITY OPTIONS.NOTE: THIS MANUAL COVERS BASIC GRIPPER CONFIGURATIONS ONLY. SPRING ASSIST AND SPRING RETURN OPTIONS ARE NON USER SERVICEABLE. RETURN SPRING ASSIST AND SPRING RETURN OPTION GRIPPERS TO FACTORY FOR DISPOSITION ANDMAINTENANCE.Automation ActuatorDivision30 Degree Angular Gripper1.GENERALGrippers are position sensors ready with magnetic pistons. Each size uses a standardized sensor groove to accept Hall Effect, reed or proximity sensors. Optional Prestolock flowcontrol fittings provide smooth and controlled jaw action. For high temperature service,fluorocarbon seals are available.2.SPECIFICATIONSq Operating pressure range: 0.3 to 7 bar (4 to 100 psi)q Operating characteristics: double acting, single actingq Mounting orientation: unrestrictedq Working ports: M5q Operating temperature rangeq Standard seals –20 to 82 degree Celsius (-4 degrees to 180 degree Fahrenheit)q Fluorocarbon seals –20 to 121 degree Celsius (-4 degrees to 250 degree Fahrenheit) q Filtration requirement: 40 micron filtered, dry air3. SECTION 1: INSPECTION AND REPLACEMENT PROCEDURE FOR 30 DEGREEANGULAR GRIPPERDisassembly:• Remove retaining ring (29).• Remove endcap (26).• Remove screw (22).• Remove piston assembly (20) from housing (17).• Remove 4 bolts (61).• Remove as a unit the guides (60), fingers (59) piston rod assembly (73) and rod endcap assembly (13)(14) (15), set aside on clean surface.• Clean and check all parts for excessive wear, replace if needed.A ssembly:• Apply a light coating of Accrolube Teflon Impregnated Grease to the seal groove in the piston assembly(20) and to the piston seal (21).• Install the piston seal on the piston assembly with the lettering facing the magnet.• Apply a light coating of grease to the piston rod seal (13) and install the seal in the Delrin endcap (14), cupped side first.• Apply grease to the o-rings (15) and install them on the endcaps (14) (26).• Install bumper (19) over piston rod assembly.Automation ActuatorDivision• Apply a light coating of grease to the piston rod assembly (73) and insert it in the Delrin endcap with the rod seal towards the dowel end.• Attach the piston assembly (20) to the piston rod assembly (73) using permanent threadlocker on the screw (22) and tighten to the proper torque.• Insert the piston and the Delrin endcap in housing.• Apply a light coating of grease to the pivot point surfaces of the finger subassemblies (58) (59).• Apply a heavy coating of grease to the pivot point holes in the guides (60). (Note: click here to go to the proximity sensor section if your gripper has that option).• Insert a dowel (16) chamfered end first, into one of the guides.• Slide the guide with the dowel, and the fingers onto the piston rod assembly.• Slide the other guide onto the other side.• Apply removable threadlocker to four SHCS (61).• Push the guides into place on the housing and secure with the four SHCSs (61).• When tightening the screws, hold the guides together with light pressure. Tighten the screws to the proper torque.• Insert the remaining endcap (29) into the housing (17) and secure with the retaining ring.Automation ActuatorDivisionDRAWING 1BALLOON DESCRIPTION QUANITY BALLOON DESCRIPTION QUANITY 13ROD SEAL122PISTON FASTENER1 14ROD END CAP124BUMPER1 15O-RING226END CAP1 16DOWEL PIN229RETAINING RING1 17HOUSING159FINGER2 19BUMPER160GUIDE2 20PISTON ASSEMBLY161GUIDE FASTENER4 21PISTON SEAL173PISTON ROD1ASSEMBLYAutomation ActuatorDivision180 Degree Angular Gripper1.GENERALGrippers are position sensors ready with magnetic pistons. Each size uses a standardized sensor groove to accept Hall Effect, reed or proximity sensors. Optional Prestolock flowcontrol fittings provide smooth and controlled jaw action. For high temperature service,fluorocarbon seals are available.2.SPECIFICATIONSq Operating pressure range: 0.3 to 7 bar (4 to 100 psi)q Operating characteristics: double acting, single actingq Mounting orientation: unrestrictedq Working ports: M5q Operating temperature rangeq Standard seals –20 to 82 degree Celsius (-4 degrees to 180 degree Fahrenheit)q Fluorocarbon seals –20 to 121 degree Celsius (-4 degrees to 250 degree Fahrenheit) q Filtration requirement: 40 micron filtered, dry air3. SECTION 2: INSPECTION AND REPLACEMENT PROCEDURE FOR 180 DEGREEANGULAR GRIPPERDisassembly:• Remove retaining ring (29).• Remove endcap (26).• Remove screw (22).• Remove piston assembly (84) from housing (17).• Remove 4 bolts (72).• Remove as a unit the guides (77), fingers (74), levers (76), piston rod assembly (78) and rod endcap assembly (13) (14) (15), set aside on clean surface.• Clean and check all parts for excessive wear, replace if needed.A ssembly:• Apply a light coating of Accrolube Teflon Impregnated Grease to the seal groove in the piston assembly(84), and to the piston seal (21).• Install the piston seal on the piston assembly with the lettering facing the magnet.• Apply a light coating of grease to the piston rod seal (13) and install the seal in the Delrin endcap (14).• Apply grease to the o-rings (15) and install them on the endcaps (14) (26).• Install bumper (19) over piston rod assembly.• Apply a light coating of grease to the piston rod assembly (78) and insert it in the Delrin endcap with the rod seal towards the dowel end.• Attach the piston assembly (84) to the piston rod assembly using permanent threadlocker on the screw(22) and tighten to the proper torque.Automation ActuatorDivision• Insert the piston and the Delrin endcap in housing.•Apply a light coating of grease to the pivot point surfaces of the finger/lever assemblies (74) (76).• Apply a heavy coating of grease to the pivot point holes in the guides (77).• Insert a dowel (16) chamfered end first, into one of the guides. (Note: click here to refer to the section on proximity sensors if it pertains to your gripper.)• Slide the guide with the dowel, the fingers and the levers onto the piston rod assembly.• Slide the other guide onto the other side. (Note: click here to refer to the section on stroke adjust front if it pertains to your gripper.)• Apply removable threadlocker to four SHCS (72).• Push the guides into place on the housing (17) and secure with the four SHCSs (72). When tightening the screws, hold the guides together with light pressure.• Tighten the screws to the proper torque. (Note: click here to refer to the section on stroke adjust rear if it pertains to your gripper.)• Insert the remaining endcap (26) into the housing and secure with the retaining ring (29).Automation ActuatorDivisionDRAWING 2BALLOON DESCRIPTION QUANITY BALLOON DESCRIPTION QUANITY 13ROD SEAL126END CAP1 14ROD END CAP129RETAINING RING1 15O-RING272FASTENERS4 16DOWEL PIN274FINGER2 17HOUSING175DOWEL2 19BUMPER176LEVER2 21PISTON SEAL177GUIDE2 22PISTON FASTENER178PISTON ROD ASSEMBLY1 24BUMPER184PISTON ASSEMBLY1Automation ActuatorDivisionSTROKE ADJUST FRONTDRAWING 3SECTION 2A: STROKE ADJUST FRONT• Install the stroke adjust cap (80) on top of the guides.• Apply removable threadlocker to the last 3-4 threads of fasteners (79) and tighten to proper torque.• Install set screw (83), flat washer (81) and jamnut (82) so that the piston has a full stroke. Tighten jam nut.Automation ActuatorDivisionSTROKE ADJUST REARDRAWING 4SECTION 2B: STROKE ADJUST REAR•Screw the peened set screw (33) fully into the end cap (28) so the peened end is in the counter bore.•Install the sealing washer (30), flat washer (31) and jam nut (32) on the outside of the setscrew.•Tighten the jam nut.•Apply a light coating of grease to the o-ring groove in the end cap and the o-ring(15). Install the o-ring on the end cap and insert into the housing. Install theretaining ring (29) into the housing.Automation ActuatorDivisionPROXIMITY SENSORDRAWING 5SECTION 2C: PROXIMITY SENSORS• Insert a dowel (*16) chamfered end first, into the guide containing the clearance holes for the finger pivot dowel.• Slide the guide with the dowel, (and the fingers with the longer end of the dowel protruding out of the guide), onto the piston rod assembly, and facing up towards the slots on the housing.• Slide the other guide onto the other side.• Apply removable threadlocker to four SHCS.• Push the guides into place on the housing and secure with the four SHCSs (*61). When tightening the screws, hold the guides together with light pressure.• Tighten the screws to the proper torque.• Insert the remaining endcap (*29) into the housing (*17) and secure with the retaining ring.• Attach both sensor flags (67) to the pivot pins (65A) of the fingers. Mount proximity sensors and bracket(71) with 1mm clearance between sensor and nearest flag surface.*SEE DRAWING 1 FOR 30 DEGREE GRIPPER*SEE DRAWING 2 FOR 180 DEGREE GRIPPERAutomation ActuatorDivisionParallel Gripper1.GENERALGrippers are position sensors ready with magnetic pistons. Each size uses a standardizedsensor groove to accept Hall Effect, reed or proximity sensors. Optional Prestolock flowcontrol fittings provide smooth and controlled jaw action. For high temperature service,fluorocarbon seals are available.2.SPECIFICATIONSq Operating pressure range: 0.3 to 7 bar (4 to 100 psi)q Operating characteristics: double acting, single acting, spring assistq Gripping force @ 6 Bar: 78 to 1086 N (17.5 to 244 lb.)q Mounting orientation: unrestrictedq Working ports: M5q Operating temperature rangeq Standard seals –20 to 82 degree Celsius (-4 degrees to 180 degree Fahrenheit)q Fluorocarbon seals –20 to 121 degree Celsius (-4 degrees to 250 degree Fahrenheit) q Filtration requirement: 40 micron filtered, dry air3. SECTION 3:INSPECTION AND REPLACEMENT PROCEDURE FOR PARALLEL GRIPPER Disassembly:• Remove retaining ring (29).• Remove endcap (26).• Remove screw (22).• Remove piston assembly (20) from housing (17).• Remove cover (1).• Remove 4 screws (3).• Remove as a unit the guide cap (4) guide (9), fingers (10), piston rod assembly (6) (7) (8) and rod endcap assembly (13) (14) (15), set aside on clean surface.• Clean and check all parts for excessive wear, replace if needed.A ssembly:• Apply a light coating of Accrolube Teflon Impregnated Grease to the seal groove in the piston assembly (20) and to the piston seal (21).• Install the piston seal on the piston assembly with the lettering facing the magnet. Set aside on a clean surface.Automation ActuatorDivision• Apply a light coating of grease to all surfaces of the fingers (10) except the face with the tapped holes.• Apply a heavy coating of grease in the finger slot. Set aside on a clean surface.• Press two dowels (16) chamfered end first, into guide (9) if the fit requires it.• Apply a light coating of grease to the inside channel surfaces of the guide and a heavy coating of grease in the slots of the guide.• Temporarily set the guide in position on top to the housing (17).• Apply a light coating of grease to all surfaces of the piston rod assembly (6) except the tapped end.• Install a bronze spacer (7) on each end of the piston rod assembly and slide against the piston rod.• Install the fingers on the piston rod assembly according to the function drawings.See function drawings in Section 3A.Apply a light coating of grease on each bearing (8) and install on the piston rod assembly.• Rotate the etched mark on the bearing so that the etched marks face opposite the tapped end of the piston rod.• Insert the piston rod assembly with fingers into the channel in the guide with the piston rod protruding through the floor of the guide (9). The etched marks on the bearing should be visible at the top of the guide track. If not, re-install.• Apply a light coating of grease to the o-ring grooves in the endcaps (14) (26) and the o-rings (15).• Install the o-rings on the endcaps (14) (26).• Insert the rod seal (13) into the pocket in the Delrin endcap (14), cupped side first. Set aside on a clean surface.• Remove the guide/finger assembly from the housing (17) and move the piston rod to maximum extension through the guide.• Install the Delrin endcap assembly over the piston rod assembly, seal end first, keeping grease clear of the tapped hole in the piston rod assembly.• Set guide/ finger assembly on a clean surface with the piston rod assembly up.• Set the piston assembly on top of the piston rod assembly, small counter bore to the rod.• Apply removable threadlocker to the last four threads of the screw (22) and tighten to proper torque.• Apply a light coating of grease to the bore of the housing (17).• Set housing on clean surface with bore vertical and two dowel holes up.• Install two dowels (16) in housing.• Insert guide/piston sub assembly into the housing.• Apply a light coating of grease to the flat side of the guide cap (4) keeping grease away from the holes.• Install the guide cap on top of the guide with the solid edge above the fingers.• Apply removable threadlocker to the last 3-4 threads of the four screws (3) and tighten per proper torque.• Apply a light coating of grease to the end cap (26) and the o-ring.Automation ActuatorDivision• Insert the endcap into the housing (17). Install the retaining ring (29) into the housing.• Install the cover (1) by stretching over the fingers.DRAWING 6BALLOON DESCRIPTION QUANITY BALLOON DESCRIPTION QUANITY 1COVER115O-RING23FASTENER416DOWEL PIN24GUIDE CAP117HOUSING1119BUMPER1 6PISTON RODASSEMBLY7SPACER220PISTON ASSEMBLY18BEARING221PISTON SEAL19GUIDE122PISTON FASTENER1Automation ActuatorDivision10FINGER224BUMPER1 13ROD SEAL126END CAP1 14ROD END CAP129RETAINING RING1 SECTION 3A: FUNCTION DRAWINGSF01 FINGER ARANGEMENTSTANDARD TRAVEL, MAXIMUM GRIP CLOSEDSAMPLE MODEL CODESP5G-AP4B AD NNSP5G-AP4B AE NNSP5G-AP4B AF NNSP5G-AP4B AG NNSP5G-AP4B AN NNS(MAN10.DWG)F01 FINGER ARANGEMENTSTANDARD TRAVEL, MAXIMUM GRIP OPENSAMPLE MODEL CODESP5G-AP4B BD NNSP5G-AP4B BE NNSP5G-AP4B BF NNSP5G-AP4B BG NNSP5G-AP4B BN NNS(MAN11.DWG)Automation ActuatorDivisionF03 FINGER ARANGEMENT EXTENDED TRAVEL, MAXIMUM GRIP OPENSAMPLE MODEL CODESP5G-AP4B DD NNSP5G-AP4B DE NNSP5G-AP4B DF NNSP5G-AP4B DG NNSP5G-AP4B DN NNS(MAN6.DWG)F02 FINGER ARANGEMENT EXTENDED TRAVEL, MAXIMUM GRIP CLOSEDSAMPLE MODEL CODESP5G-AP4B CD NNSP5G-AP4B CE NNSP5G-AP4B CF NNSP5G-AP4B CG NNSP5G-AP4B CN NNS(MAN9.DWG)Automation ActuatorDivisionDRAWING 7SECTION 3B: STROKE ADJUST FRONT•Install the stroke adjust guide cap (5) on top of the guide with the solid edge above the fingers.• Apply removable threadlocker to the last 3-4 threads of fasteners (3) and tighten to proper torque.• Cycle the gripper by hand. Should be smooth and easy to move. Install set screw (34), flat washer (31) and jam nut (32) so that the piston has a full stroke. Tighten jam nut.Automation ActuatorDivisionDRAWING 8SECTION 3C: STROKE ADJUST REAR• Screw the peened set screw (33) fully into the end cap (28) so the peened end is in the counter bore.• Install the sealing washer (30), flat washer (31) and jam nut (32) on the outside of the setscrew.• Tighten the jam nut.• Apply a light coating of grease to the o-ring groove in the end cap and the o-ring (15).• Install stroke adjust rear endcap (28) into housing and secure with retaining ring (29).•Install cover by stretching over fingers.Automation ActuatorDivisionDRAWING 9SECTION 3D: PROXIMITY OPTIONS• Attach both sensor flag brackets (48), to the gripper using the shipping screws (51) with flag screws (50)and jam nuts (49) installed as shown.• Mount proximity sensor bracket (45) to gripper housing as shown and secure with set screws (46).• Insert proximity sensors as shown with clearance between sensor and nearest flag surface equal toapproximately 1mm.• Secure sensors with set screws (47). Caution! Do not tighten to the extent that the sensor is damaged.• Cycle the gripper and (referring to the picture above) adjust the left hand screw so that the left hand sensor makes on the end of the screw when the gripper is closed.• Tighten jam nuts.• Cycle the gripper and (referring to the picture above) adjust the right hand screw so that the right hand sensor makes only on the screw head when the gripper is open.•Tighten jam nuts.PROXIMITY SENSOR SAMPLE MODEL CODES P5G-AP4AN PA S-*P5G-AP4AN PB S-*P5G-AP4AN PC S-*P5G-AP4AN PD S-*P5G-AP4AN PF S-*P5G-AP4AN PG S-*P5G-AP4AN PK S-*(MAN17.DWG)Automation ActuatorDivisionSECTION 4: FASTENER TORQUESFASTENER SIZE TORQUE LOCATION GRIPPERSIZElbf in Nm GUIDE/HOUSING3M3x0.5-23 SHCS15 1.74M4x0.7-30 SHCS36 4.15M4x0.7-35 SHCS40 4.56M5x0.8-37 SHCS657.3 PISTON/ROD3M3x0.5-10 SHCS20 2.264M4x0.7-8 SHCS40 4.52M4x0.7-8 HHCS40 4.525M5x0.8-12 SHCS758.47M5x0.8-12 HHCS758.476M6x1.0-12 SHCS12013.56M6x1.0-12 HHCS12013.56Automation ActuatorDivision。
哈威主动式液压站操作与维护手册

占美摇臂的调试与维护
占美摇臂的调试与维护摘要随着电视事业的快速发展和观众需求的日益提高,大型摇臂在各台的应用越来越多。
本文对占美摇臂的调试与维护进行了探讨。
关键词大型摇臂;平衡调整;电气调试;机械维护1 平衡调整。
安装摇臂,关键在于平衡调整1)摇臂三脚架及支撑云台的水平调整。
三脚架的水平调节比较简单,调整三脚架的腿长,观测水平仪使其水平。
摇臂支撑云台水平不必每次使用都进行调整,如确需调整摇臂云台水平,可松开云台上的2颗螺栓,调整云台水平;2)镜头聚焦和光圈驱动马达的调整。
安装聚焦和光圈驱动马达时,应把镜头聚焦和光圈环转到任意一方的尽头,才把齿轮扣上去,注意锁紧马达时,聚焦马达压上去时是有弹性的,应尽量压紧,然后把锁定钮锁紧。
但在调试前先不扣紧,这里关键是要使聚焦和光圈电机的行程(旋转方向和角度)与镜头聚焦和光圈环的行程相吻合。
如安装不当会发生:(1)镜头聚焦和光圈环已旋转到底,而驱动电机仍可转动,造成齿轮脱滑,不能控制,并容易损坏齿轮和电机;(2)电机旋转到末端,但聚焦和光圈环没有到位,无法实现聚焦和调节光圈;3)前臂电动云台的调整。
以电动云台水平和垂直转动轴分成2个部分分别调整。
(1)以水平转动轴为主的电动云台上臂的调整:①水平调整,摇臂臂杆安装好后,将摄像机安装在平台上,用水平尺测云台上臂的水平,调整接力平衡钢索与前平衡钢索的连接螺丝杆,使水平尺指示水平状态。
如没有水平尺,可找一参照物(与地面平行物)。
②垂直调整,将水平尺靠在云台上臂上,松开锁紧螺栓,左右转动云台上臂,使之垂直;也可观察云台上臂,使其无论转到哪个角度都能停住,保持动态平衡,这时旋紧锁定螺钉即可;(2)以垂直转动轴为主的摄像机安装平台的调整。
这部分调节需要装上摄像机、镜头聚焦伺服组件、电池、连接好所有电缆后进行。
①静态平衡调整,与一般三脚架云台一样,通过移动摄像机托板前后位置,使摄像机保持水平平衡,不低头、不仰头。
②动态平衡调整:松开云台上动态平衡锁,调整摄像机安装平台的上下位置,先轻轻锁紧动态平衡锁,垂直方向转动摄像机,直到摄像机在每个角度都不会前后倒,动态平衡就调好了;或将摄像机安装平台转动90°呈垂直状态,松开动态平衡锁,调整摄像机的前后位置,使其也能保持静止不动,旋紧旋钮。
泵车智能臂架操作手册(泵车)
泵车智能臂架操作手册三一重工泵送研究本院控制所2010年10月前言操作泵车智能臂架前请仔细阅读本说明书,并特别注意文中的粗体字。
使用范围:1.本说明书适用于三一重工混凝土泵车智能臂架系统的操作。
2.本说明书中所提到的智能臂架的所有功能,均可通过遥控器操作完成;相关泵车工况信息以及故障诊断信息,均可以在液晶显示屏上显示。
3.当泵车电控系统处于“近控状态”或紧停按钮被按下时,遥控器不起作用。
遥控系统中由操作手操作的部分在本文中被称为遥控发射器(简称遥控器),安装在泵车上的部分在本文中被称为遥控接收器(简称接收器)。
安全事项:1.使用遥控器操作时,为保证遥控系统的可靠工作,请勿将遥控器上的天线取下。
2.在进行臂架的各种操作时,请保证臂架的各部分完全处于操作手的可视范围内。
如果臂架不在操作手的可视范围内,请停止操作臂架。
3.当模式切换开关处于“直角”或“柱面”时,请特别注意各节臂架及臂架末端点的位置和运动方向,避免臂架和周围环境中的物体发生碰撞。
4.遥控器上的显示屏属于易损部件,手持遥控器时请注意背好背带。
遥控器面板说明俯视图:(图一)1:天线;2.电池欠压指示灯;3:液晶显示屏;4:定向/清零拨动开关 5:翻页/确认旋(按)钮;6:万向手柄;7:正/反泵开关;8:锁臂开关;9:自动展臂/收臂开关;10:模式切换开关;11:快/慢切换开关;12:启动按钮;13:排量增减拨动开关;14-17:1至4号臂双向手柄;31214-1745678910111213右侧视图:(图二)左侧视图:(图三)18:遥控器断电按钮;19:讯响按钮;20:紧停开关;21:上翻按钮;22:下翻按钮;23:遥控器智能钥匙;24:发动机熄火按钮25:遥控器显示屏程序下载接口;26:遥控器电板18 19 20 21 22 23 2425 26编码名称作用1 遥控发射器天线增强遥控器发射信号2 电池欠压指示灯指示遥控发射器电池电量,绿色为电量正常,红色表示电量不足,要更换电池3 液晶显示屏显示泵车工况,查询故障4 定向/清零拨动开关设定坐标系用,暂未开放5 翻页/确认旋(按)钮旋转用于显示屏翻页,按下表示确认选择6 万向手柄手动模式时控制5号臂架展臂/收臂,转台旋转;智能模式时控制臂架末端水平直走。
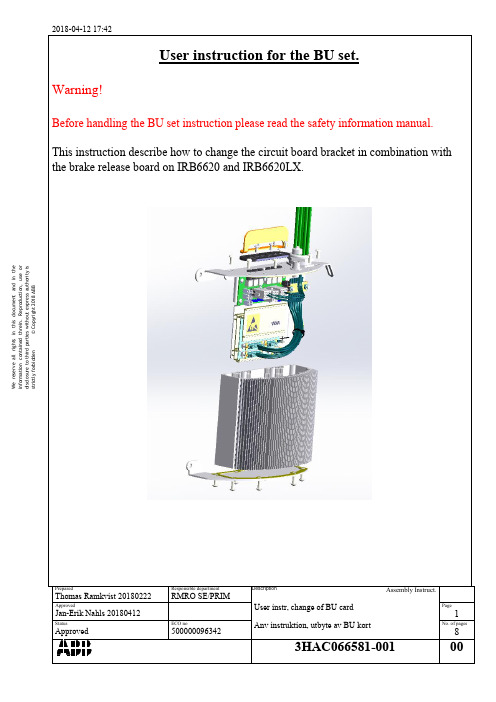
ABB IRB6620和IRB6620LX机械臂BU卡更换指南说明书
© Copyright 2018 ABB
disclosure to third parties without express authority is
information contained threin. Reproduction, use or
We reserve all rights in this document and in the
information contained threin. Reproduction, use or
We reserve all rights in this document and in the
strictly forbidden
Prepared
Thomas Ramkvist 20180222
Approved
© Copyright 2018 ABB
disclosure to third parties without express authority is
information contained threin. Reproduction, use or
We reserve all rights in this document and in the
Assembly Instruct.
User instr, change of BU card Anv instruktion, utbyte av BU kort
3HAC066581-001
Page
6
No. of pages
8
00
2018-04-12 17:42
Re-install the cables to the SMB unit with the new the screen grounding plate. (FIX THE CABLES IN THE SAME POSITION AS IT WAS FROM THE BEGINNING).
自动调整臂使用方法及常见问题的判断与处理

安装步骤
4、控制臂固定 1) 将控制臂向制动 方向推动(控制臂上有 箭头示意推动方向)直 到推不动为止。
安装步骤
注意:此时,控制臂 上指针应指向开口 或控制臂上的刻线 与控制臂盖上的刻 线对齐。其操作目 的是使自动调整臂 正常工作、免受破 坏。
安装步骤
2)安装调整臂支架, 随后将控制臂紧固 在定位支架上。
五、制动系统常见故障
症状 制动 鼓发 热 原因 措施
1 检查制动气室推杆行程是否 1 若检查调整臂预设间隙过小,需更换调整臂; ≤30㎜(这里以135中心距为标 2 检查调整臂安装是否正确,如不正确,重新安装。 准) 2 是否为新换摩擦片或制动鼓 1 若为新换摩擦片或制动鼓,自调臂需要重新安装; 2 若重新安装,过了磨合期就会正常。
建议:
1 、力矩检测时,1)拆卸后检测;2)转动幅度不要太大; 2 、同一根桥上摩擦片要求同时更换。
一侧油封漏油,致使制动鼓与摩擦片有油 更换新摩擦片,清洁并烘干制动鼓内表 污。 面。 左右轮胎气压是否统常见故障
症状 制动 疲软 原因 措施
检 查 制 动 气 室 推 杆 行 程 是 否 ≥ 45㎜ 1 检查调整臂安装是否正确,如不正确, (以135中心距为标准)。 重新安装; 2 检查调整臂是否失效,如失效,则更换 新的调整臂。 制动气室推杆总行程是否≯58㎜。 制动鼓与摩擦片间是否有油污。 调整臂是否正确安装。 制动气室回位是否彻底 手动调整臂与自动调整臂是否混装 更换符合要求的制动气室。 更换新摩擦片,清洁并烘干制动鼓内表 面。 按说明书正确装配调整臂。 检查气路,确保气路畅通; 检查气室,确保气室工作正常。 建议全部使用自动调整臂。
制动系统常见故障
症状 原因 措施
检查凸轮轴工作情况 调整行程 更换摩擦片 检查气功管路及各气阀 校正摩擦片贴合位置或磨合 清洗油迹和更换摩擦片 在行驶过程中,轻轻地踩下踏 板,使水排干
腕臂、软横跨安装作业 指导书
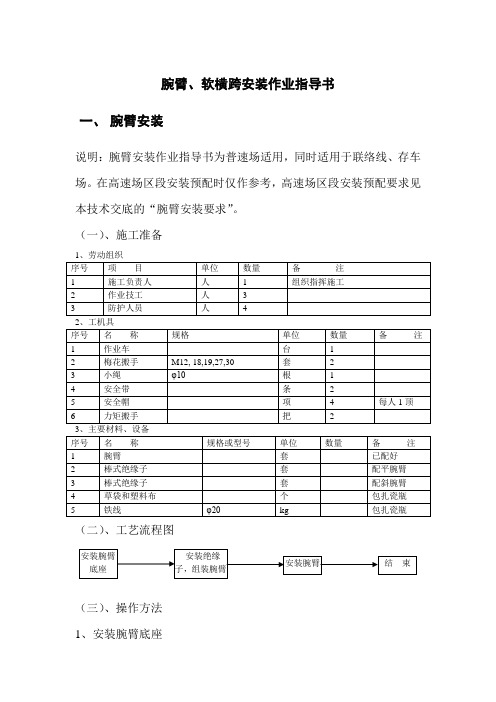
腕臂、软横跨安装作业指导书一、腕臂安装说明:腕臂安装作业指导书为普速场适用,同时适用于联络线、存车场。
在高速场区段安装预配时仅作参考,高速场区段安装预配要求见本技术交底的“腕臂安装要求”。
(一)、施工准备(二)、工艺流程图(三)、操作方法1、安装腕臂底座①以测量的轨面标高为基准,用钢尺或高度测量仪测出设计要求安装上、下底座位置,做好标记(1人系安全带上杆,1人地面配合)。
②再上杆1人带安全带、小绳,扎好安全带,放下小绳,地面人员将底座预组件装好后扎牢。
③杆上一人拉绳,将底座提至安装位置。
④两人配合,把上底座螺栓由线路侧穿向田野侧,一人把上底座扶正,另一人预带垫片螺帽,用梅花搬手紧固后,用力矩搬手检验紧固力矩。
⑤上底座安装完毕,两人解开安全带攀至下底座位置1m以下扎好安全带。
⑥按1—4的要求,安装下底座。
2、安装绝缘子、组装腕臂①按安装计划,将所需棒式绝缘子运至工地,放在平地上。
②按设计要求,装配P、X腕臂棒式绝缘子。
③用塑料布将棒式绝缘子包好,用φ2.0铁绑三遍(两头、中间),再用草带包上,用φ2.0铁线同包塑料布一样扎三遍。
④按标识将P、X腕臂连接上,拧好螺母和开口销,螺栓销应穿向来车方向。
3、安装腕臂(机械)①装配好的腕臂,按作业计划先装在作业车上。
②封闭线路,点内作业车运行至安装地点,施工负责人确定腕臂编号与安装地点相符。
③作业车停在支柱附近,旋转作业平台靠近支柱。
④两人抬起斜腕臂,将斜腕臂棒瓷的连接板插入腕臂底座,一人扶住底座配合,斜腕臂棒瓷连接板的孔与下底座连接板孔对齐,立即把螺栓销穿入(方向朝来车方向,然后装好螺母和开口销)。
⑤作业车平台稍回转并缓缓升到上底座下1m处,升平台时两人扶住腕臂以免将包扎物挂掉。
⑥1人扶住斜腕臂,两个抬起平腕臂,作业车稍旋转返回。
把棒瓷连接板对准上底座的连接板,当两孔对准时,立即将螺栓销穿向来车方向,然后安装好螺母和开口销。
4、结束①检查安装完的腕臂,确认无误下降平台,按上述步骤,继续安装下一个腕臂。
人民电器 DBW、SBW系列交流稳压器 使用说明书

D B W(S B W)系列全自动补偿式电力稳压器符合标准:J B/T8749.8警告1 三相SBW稳压器必须接入零线即三相四线才能工作,严禁用地线代替零线,或不接零线。
通电后应使用电压转换开关,观察三相电压均正常方可投入运行。
2 为了确保设备和人身安全,自动稳压器外壳均设有接地螺钉或接地端子,安装时务必接好地线。
3 安装、接线、调整等带电工作,必须由电工来操作,避免在接线,调整时触电或损坏稳压器。
注意1 输入电压在允许范围内,输出电压不稳定应进行检查(见故障原因与排除),输入电压稍超出允许范围,输出电压的改变若对用户影响不大,适当降容可继续运行。
当输入电压返回到允许范围内,输出电压能自动保持稳定。
2 常规型号的稳压器没有独立的分相控制与调节功能,如输入电压三相不平衡(超出额定值±4%)或使用负载造成三相电压不平衡时,需采用分相调压补偿式稳压器SBW-F型号。
3 当输入电压值小于额定值的90%时,输出端负载应随输入电压的降低而减少,输入电压为下限时,使用负载为额定容量的60%(为纯阻性负载时)。
1 概述DBW、SBW系列全自动补偿式电力稳压器(以下简称稳压器)是我集团公司采用国际先进的补偿式技术,同时结合我国电力系统的国情而设计制造的,当电网电压波动或负载变动而造成电压波动时能自动保持输出电压的稳定。
稳压器具有容量大、效率高、电压调节平稳、无波形畸变,适用负载广泛,可长期连续工作,自动、手动随意切换,使用方便等优点,可广泛用于工业、农业、邮电、通讯领域的大型机电设备等一切需要稳压供电的场所。
本产品按JB/T7620标准设计、制造与检验。
2 产品特点2.1 具有开机延时功能在稳压状态运行时,按稳压按钮,稳压器开机调整到稳压额定值时(几秒钟),才有输出电压供用电设备。
2.2 具有输出过电压保护与报警功能在稳压状态,当输入电压大大超出输入电压范围(304V~456V)或其他原因致使稳压器的输出电压出现过电压(426±7V)时,稳压器切断电源并报警,当输出电压降低时,自动恢复工作。
刹车间隙自动调整臂使用维修说明书
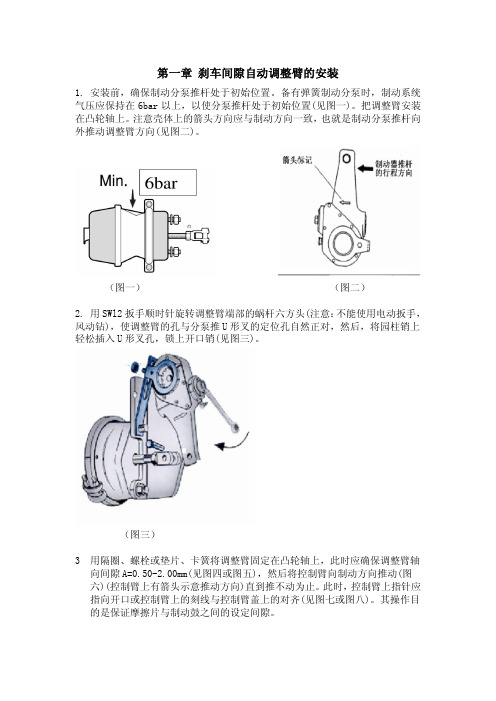
刹车间隙自动调整臂使用维修说明书欧曼营销公司服务管理部2008年3月目 录第一章 刹车间隙自动调整臂安装步一 (1)第二章 刹车间隙自动调整臂拆卸步骤 (4)第三章 刹车间隙自动调整臂的保养 (4)第四章 安装刹车间隙自动调整臂过程的注意事项 (4)第五章 常见故障及处理指南 (5)第一章 刹车间隙自动调整臂的安装1.安装前,确保制动分泵推杆处于初始位置。
备有弹簧制动分泵时,制动系统气压应保持在6b a r以上,以使分泵推杆处于初始位置(见图一)。
把调整臂安装在凸轮轴上。
注意壳体上的箭头方向应与制动方向一致,也就是制动分泵推杆向外推动调整臂方向(见图二)。
(图一) (图二)2.用S W l2扳手顺时针旋转调整臂端部的蜗杆六方头(注意:不能使用电动扳手,风动钻),使调整臂的孔与分泵推U形叉的定位孔自然正对,然后,将园柱销上轻松插入U形叉孔,锁上开口销(见图三)。
(图三)3用隔圈、螺栓或垫片、卡簧将调整臂固定在凸轮轴上,此时应确保调整臂轴向间隙A=0.50-2.00m m(见图四或图五),然后将控制臂向制动方向推动(图六)(控制臂上有箭头示意推动方向)直到推不动为止。
此时,控制臂上指针应指向开口或控制臂上的刻线与控制臂盖上的对齐(见图七或图八)。
其操作目的是保证摩擦片与制动鼓之间的设定间隙。
(图四)(图五)(图六)(图七)(图八)4.安装调整臂支架,随后将控制臂紧固在定位支架上(见图九)。
(图九)5.用扳手顺时针转动调整臂蜗杆六角头直至摩擦片与制动鼓接触,然后再逆时针方向转动蜗杆六角头3/4圈(反向转动时会听到咔咔声)(见图十)。
注意:不能使用电动扳手、风动钻!(图十)6. 施加若干次(约5次)制动,刹车间隙自动调整至正常范围,调整功能可通过蜗杆六角头在刹车即将结束时顺时针力向自动旋转观察到,至此安装过程结束。
(见图十一)(图十一)第二章刹车间隙自动调整臂的拆卸1.拆下制动分泵上连接的开口销、圆柱插销,使制动分泵与调整臂分离。
刹车调整臂安装
东风153客车桥HALDEX刹车间隙自动调整臂安装步骤一、前桥HALEDX刹车间隙自动调整臂的拆卸1、移去制动分泵连接叉的开口销、圆柱插销,使之与刹车间隙自动调整臂分离。
2、拆去控制臂与定位支架相连的支柱螺栓,螺母垫片。
3、拆去轮轴上的轴向定位螺检及垫片。
4。
SW12的扳手逆时针方向转动刹车间隙自动调整臂上的六角调整螺母,移出调整臂(所需力矩较大,会听到咔咔声),随后将其拆除。
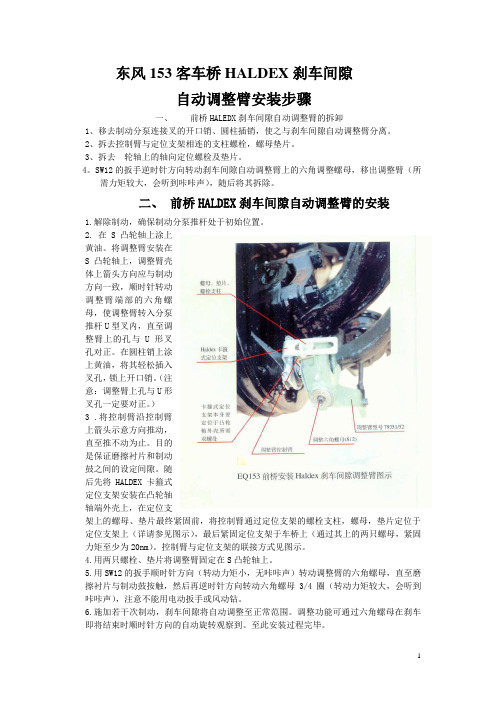
二、前桥HALDEX刹车间隙自动调整臂的安装1.解除制动,确保制动分泵推杆处于初始位置。
2. 在S凸轮轴上涂上黄油。
将调整臂安装在S 凸轮轴上,调整臂壳体上箭头方向应与制动方向一致,顺时针转动调整臂端部的六角螺母,使调整臂转入分泵推杆U型叉内,直至调整臂上的孔与U 形叉孔对正。
在圆柱销上涂上黄油,将其轻松插入叉孔,锁上开口销。
(注意:调整臂上孔与U形叉孔一定要对正。
)3 .将控制臂沿控制臂上箭头示意方向推动,直至推不动为止。
目的是保证磨擦衬片和制动鼓之间的设定间隙。
随后先将HALDEX卡箍式定位支架安装在凸轮轴轴端外壳上,在定位支架上的螺母、垫片最终紧固前,将控制臂通过定位支架的螺栓支柱,螺母,垫片定位于定位支架上(详请参见图示),最后紧固定位支架于车桥上(通过其上的两只螺母,紧固力矩至少为20nm)。
控制臂与定位支架的联接方式见图示。
4.用两只螺栓、垫片将调整臂固定在S凸轮轴上。
5.用SW12的扳手顺时针方向(转动力矩小,无咔咔声)转动调整臂的六角螺母,直至磨擦衬片与制动鼓按触,然后再逆时针方向转动六角螺母3/4圈(转动力矩较大,会听到咔咔声),注意不能用电动扳手或风动钻。
6.施加若干次制动,刹车间隙将自动调整至正常范围。
调整功能可通过六角螺母在刹车即将结束时顺时针方向的自动旋转观察到。
至此安装过程完毕。
三、后桥HALDEX刹车间隙自动调整臂的拆卸1使后桥的弹簧制动分泵保持至少6bar的压力。
移去制动分泵上连接叉的开口销、插销,使之与刹车间隙自动调整臂分离。
自动调整臂

四、 自动调整臂安装及注意事项
自动调整臂安装 3、将控制臂按制动时自调 臂转动方向转到极限位置后, 用螺栓将控制臂与连接板固定。
4、顺时针转动蜗杆六角头, 带制动凸轮轴转动,使制动蹄 与制动鼓接触,再回转(逆时 针)3/4圈。
四、 自动调整臂安装及注意事项
自动调整臂安装
四、 自动调整臂安装及注意事项
谢谢!
二、 自动调整臂的结构
在手动调整臂基础上,增加了离合齿轮、驱动齿轮、 齿条、单向离合器、控 制滑环等。
离合齿轮 齿条 控制臂 齿条
间隙
二、 自动调整臂的结构
控制臂
自调臂总成
二、 自动调整臂的结构
一代调整臂结构
9 蜗杆 10 油杯 11 壳体 1 铆钉 12 加强圈 2 螺盖 13 止推垫片 3 轴承 14 止推弹簧 4 锥形离合器 15 调整端螺盖 5 离合器弹簧 16 闷盖 6 齿轮 17 复位弹簧(内) 7 轴套 18 复位弹簧(外) 8 O型圈(Ⅰ) 19 齿条
气制动自动调整臂简介
2012年03月23日
一、 自动调整臂的优点
自动保持摩擦片和制动鼓之间间隙恒定,因而刹车安 全可靠。
压缩空气的损耗小,延长了空气压缩机、制动分泵和 压缩空气系统中其它部件的寿命。
制动迅速可靠,使所有车轮的制动效果一致、稳定。
安装方便。 安装过程结束,不再需要人工调节刹车调整臂,减少 了维修次数,保养车辆的时间间隔得以延长,从而提高 了经济效益。
调整臂向回转过角“A”,齿条“19” 向上运动,与控制环“24”的槽口的接 触从下端变为上端。
三、 自动调整臂的工作原理
9 向回转过超量间隙角“B” 调整臂继续转动回到起始位置。此时, 齿条“19”已与固定的控制环“24”的 槽口上端相接触,受其限制不能继 续向上移动。当调整臂回转时,齿 条驱动齿轮“6”转动,此时单向 离合器和锥齿离合器均处于啮合状 态,使得蜗杆“9”随齿轮一起转 动,蜗杆驱动蜗轮“21”,蜗轮驱动 凸轮轴,而凸轮轴的转动使得超量 间隙减小,自动调整臂工作结束。
Davis 天气站传感器安装臂说明书
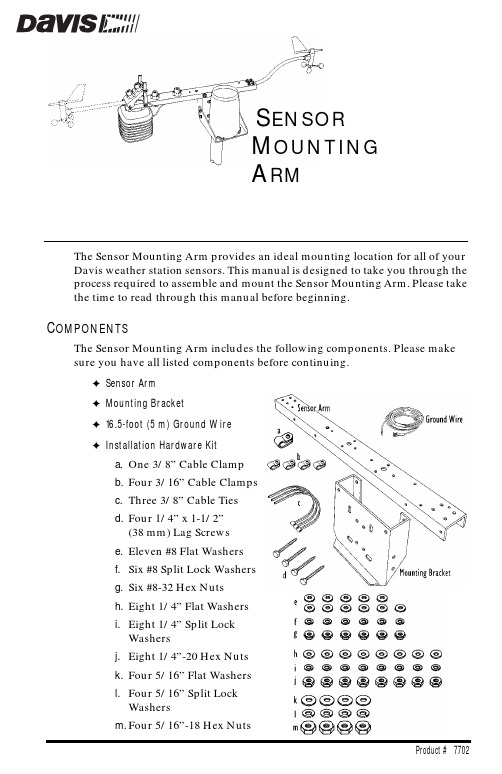
Product # 7702S E N S O RM O U N T I N GA R MThe Sensor Mounting Arm provides an ideal mounting location for all of your Davis weather station sensors. This manual is designed to take you through the process required to assemble and mount the Sensor Mounting Arm. Please take the time to read through this manual before beginning.C OMPONENTSThe Sensor Mounting Arm includes the following components. Please make sure you have all listed components before continuing.3Sensor Arm3Mounting Bracket316.5-foot (5 m) Ground Wire3Installation Hardware Kita.One 3/8” Cable Clampb.Four 3/16” Cable Clampsc.Three 3/8” Cable Tiesd.Four 1/4” x 1-1/2”(38 mm) Lag Screwse.Eleven #8 Flat Washersf.Six #8 Split Lock Washersg.Six #8-32 Hex Nutsh.Eight 1/4” Flat Washersi.Eight 1/4” Split LockWashersj.Eight 1/4”-20 Hex Nutsk.Four 5/16” Flat Washersl. Four 5/16” Split LockWashersm.Four 5/16”-18 Hex Nutsn.Two 1/2” U-Bolts (foranemometer arm)o.Two 1/2” Saddlesp.Two 1-1/2” U-Bolts (forpipe with outside diameterbetween 1” and 1-1/4”(25 mm and 31 mm)q.Two 2-1/4” U-Bolts (forpipe with outside diameterbetween 1-1/2” and 2-3/8”(38 mm and 60 mm)r.Two 2-1/4” Saddless.Three #8-32 x 3/4”(19 mm) Screwst.Two #8-32 x 2 -1/2”(64 mm) ScrewsT OOLS AND M ATERIALS N EEDEDIn addition to the components listed above, you will need some of the follow-ing tools and materials. Please be sure you have everything you need before beginning the installation.3Medium Phillips Screwdriver3Wrench or Pliers311/32” (9 mm) Nut Driver or Socket WrenchIf mounting the anemometer on the same side as the Radiation Shield.A SSEMBLING THE S ENSOR M OUNTING A RMThe assembly of the sensor arm involves attaching the mounting bracket and then attaching all desired sensors. Instructions for attaching sensors (other than the anemometer) to the Sensor Mounting Arm are contained in the manual for that sensor or for the accessory which allows that sensor to be attached (such as the Radiation Shield or the Rain Collector Shelf). The Sensor Mounting Arm includes provisions for attaching the following sensors:3Anemometer3External Temperature Sensor, External Temperature/Humidity Sensor, or Stainless Steel Temperature Probe (with Radiation Shield or Solar-Fan-Aspirated RadiationShield)3Rain Collector (with Rain Collector Shelf)3UV Sensor (with or without Tilting Mechanism)3Solar Radiation Sensor (with or without Tilting Mechanism)Page 2Sensor Mounting ArmS ENSOR A RM H OLE A SSIGNMENTSTypical Sensor Mounting Arm InstallationThe illustration below shows a typical Sensor Mounting Arm installationwith all possible sensors attached to the sensor arm.T YPICAL S ENSOR M OUNTING A RM I NSTALLATIONAssembling the Sensor Mounting Arm Page 3Page 4Sensor Mounting ArmA TTACHING THE M OUNTINGB RACKETIn order to attach the mounting bracket to the sensor arm, you will need the sensor arm, mounting bracket, two #8-32 x 2-1/2” screws, four #8 flat washers, two #8 split lock washers, and two #8-32 hex nuts.1.Place one #8 flat washer over the end of each of the #8-32 x 2-1/2” screws.2.Position the mounting bracket so the holes in the mounting bracket line up with the appropriate holes on the sensor arm.3.Slide each of the #8-32 x 2-1/2” screws (with washer) through the holes on the sensor arm and the mounting bracket.4.Secure the mounting bracket to the sensor arm using a #8 flat washer, #8 split lock washer, and a #8-32 hex nut on each screw end.Tighten until the mounting bracket is securely fastened to the sensor arm.A TTACHING THE M OUNTING BRACKETAttaching the AnemometerPage 5A TTACHING THE A NEMOMETERYou may mount the anemometer on either side of the sensor arm. The pre-ferred mounting location for the anemometer is on the end closest to the mounting bracket. However, if you have an anemometer with a straight arm and a Rain Collector attached to the Sensor Mounting Arm, the Rain Collector might create obstruction problems which result in inaccurate wind speed and direction readings. In this case (and only in this case), you may want to mount the anemometer on the end farthest from the mounting bracket.In general, you should mount the anemometer below the sensor arm, following the instructions in “Attaching the Anemometer Below the Sensor Arm (Pre-ferred)” on page 6. If, however, you need to mount the anemometer arm on the end farthest from the mounting bracket and you have a radiation shieldmounted on that side as well, attach the anemometer above the sensor arm, fol-lowing the instructions in “Attaching the Anemometer Above the Radiation Shield” on page 9.T YPICAL A NEMOMETER MOUNTSPage 6Sensor Mounting ArmAttaching the Anemometer Below the Sensor Arm (Preferred) To attach the anemometer below the sensor arm, you will need the anemome-ter, sensor arm, two 1/2” U-bolts, two 1/2” saddles, four 1/4” flat washers, four 1/4” split lock washers, four 1/4” hex nuts, one cable clamp, one #8-32 x 3/4” screw, one #8 flat washer, and one #8-32 hex nut.A NEMOMETER A TTACHEDB ELOW S ENSOR A RM1.If necessary, disconnect the anemometer from your weather station.Your weather station manual contains instructions for connecting the two. Simply reverse the directions to disconnect them.2.If necessary, disconnect the anemometer arm from the anemometer base.Your weather station manual contains instructions for connecting the two. Simply reverse the directions to disconnect them.3.Place one of the 1/2” U-bolts over the anemometer arm.4.Slide one of the saddles over the end of the U-bolt so the anemometer arm is con-tained in the circle created by the U-bolt and the saddle.P LACE U-B OLT AND S ADDLE ON A NEMOMETER A RM5.Repeat this process for the other 1/2” U-bolt and saddle.Attaching the AnemometerPage 76.Slide the ends of the U-bolts into the appropriate holes at the end of the sensor armnearest the mounting bracket.S LIDE U-B OLTS INTO H OLES7.Secure the U-bolts and anemometer arm in place using a 1/4” flat washer, 1/4” splitlock washer and 1/4” hex nut on each of the U-bolt ends.Tighten the hex nuts with your hand so the arm is gently held in place. Do not tighten fully until instructed to do so later on.A TTACH THE U-B OLTS AND A NEMOMETER A RMPage 8Sensor Mounting Arm 8. Slide the anemometer arm backwards/forwards until the end of the anemometer arm extends just 1/2” (13 mm) past the second U-bolt/saddle.P OSITION A NEMOMETER ARM9.Once the anemometer arm is correctly positioned, tighten the hex nuts.In order to keep the anemometer arm steady in high winds, tighten the hex nuts until you notice the anemometer arm just begin to buckle underneath the U-Bolt.10.Place a cable clamp around the anemometer cable.11.Slide a #8-32 x 3/4”screw down through the indicated hole on the sensor arm.A TTACH THE C ABLE C LAMP12.Slide the hole in the cable clamp over the end of the #8-32 x 3/4” screw.13.Secure the cable clamp and cable in place using an #8 flat washer and an #8-32 hex nut.Tighten the hex nut until the cable is held snugly within the cable clamp.Attaching the AnemometerPage 9Attaching the Anemometer Above the Radiation Shield To attach the anemometer above the sensor arm, you will need the anemome-ter, sensor arm, two 1/2” U-bolts, two 1/2” saddles, four 1/4” flat washers, four 1/4” split lock washers, four 1/4” hex nuts, one cable clamp, one #8-32 x 3/4” screw, one #8 flat washer, and one #8-32 hex nut.A NEMOMETER A TTACHED A BOVE S ENSOR A RM1.If necessary, remove the Radiation Shield from the sensor arm.You cannot mount the anemometer above the Radiation Shield if the radia-tion shield has already been attached to the sensor arm.2.If necessary, disconnect the anemometer from your weather station.Your weather station manual contains instructions for connecting the two. Simply reverse the directions to disconnect them.3.If necessary, disconnect the anemometer arm from the anemometer base.Your weather station manual contains instructions for connecting the two. Simply reverse the directions to disconnect them.4.Place one of the 1/2” U-bolts over the anemometer arm.5.Slide one of the saddles over the end of the U-bolt so the anemometer arm is con-tained in the circle created by the U-bolt and the saddle.P LACE U-B OLT AND S ADDLE ON A NEMOMETER A RM6.Repeat this process for the other 1/2” (13 mm) U-bolt and saddle.Page 10Sensor Mounting Arm 7.Position the U-bolts/saddles on top of the sensor arm on the side farthest from the mounting bracket so the ends of the U-bolts drop into the appropriate holes.S LIDE U-B OLTS INTO H OLES8.While holding the U-bolts in place, turn the sensor arm over so the protruding ends of the U-bolts are visible.9.Secure the U-bolts and anemometer arm in place using a 1/4” flat washer, 1/4” split lock washer and 1/4” hex nut on each of the ends of the U-bolts.Tighten the hex nuts with your hand so the arm is gently held in place. Do not tighten fully until instructed to later on.A TTACH THE U-B OLTS AND A NEMOMETER A RMAttaching the Anemometer Page 1110.Slide the anemometer arm backwards/forwards until the end of the anemometer arm extends just 1/2” past the second U-bolt/saddle.P OSITION A NEMOMETER A RM11.Once the anemometer arm is correctly positioned, tighten the hex nuts.In order to keep the anemometer arm steady in high winds, tighten the hex nuts until you notice the anemometer arm just begin to buckle underneath the U-Bolt.12.Place a cable clamp around the anemometer cable.13.Slide a #8-32 x 3/4”screw down through the indicated hole on the sensor arm.A TTACH THE C ABLE C LAMP14.Run the anemometer cable underneath the sensor arm and slide the hole in the cable clamp over the end of the #8-32 x 3/4” screw.M OUNTING ON A W OODEN P OSTSensor Mounting ArmM OUNTING ON A S MALL P IPE Mounting the Sensor Mounting ArmPage 14Sensor Mounting Arm Mounting the Sensor Mounting Arm on a Large PipeFollow the instructions below to mount the Sensor Mounting Arm on a pipe with an outside diameter between 1-1/2” and 2-3/8” (38 mm and 60 mm). To attach to a large pipe, you will need the sensor arm assembly (with mounting bracket and sensors attached), two 2-1/4” U-bolts, two 2-1/4” saddles, four 5/16” flat washers, four 5/16” lock washers, and four 5/16” hex nuts.1.Wrap one of the 2-1/4” U-bolts around the pipe and hold it in place.2.Slide one of the 2-1/4” saddles over the ends of the U-bolt so that it wraps around the pipe as well.U-B OLTS AND S ADDLES ON P IPE3.Repeat the steps above for the other U-bolt and saddle.4.Slide the ends of the U-bolts into the holes on the mounting bracket.5.Secure the U-bolt in place using a 5/16” flat washer, 5/16” lock washer, and a 5/16” hex nut.Tighten the hex nuts securely.Grounding the Sensor Mounting Arm Page 15G ROUNDING THE S ENSOR M OUNTING A RMWe strongly recommend that you ground the sensor arm. You will need the 16.5’ (5 m) ground wire, one #8 split lock washer, and one #8-32 hex nut.1.Slip the ring at the end of the 16.5’ (5 m) ground wire over the lug on the underside of the sensor arm.2.Secure the ground wire to the lug using a #8 split lock washer and a #8-32 hex nut.S ECUREG ROUND W IRE TO S ENSOR A RM3.Connect the other end of the ground wire to a suitable earth ground (grounded metal cold water pipe or ground rod driven into the earth).S AFETY AND B UILDING C ODESWhen installing the Sensor Mounting Arm, a 2” (5 cm) pipe should be ade-quate for general homeowner’s backyard or open-field agricultural locations for a mounting height of 6 to 8 feet (2 to 2.5 m) provided that low wind-loading conditions apply and the pipe is anchored to a suitable foundation. (If you are unsure, consult a qualified professional for national and local codes.)Regardless of the mounting location, local building codes must be followed. If you want to mount onto a taller mast, a building, or any location where high wind or seismic loads might be encountered, seek professional help from a structural engineer or local contractor. Remember always to use common sense.When installing the Sensor Mounting Arm and sensors, always watch for over-head power lines. Electric shock, death, or damage to the sensitive electronics could result if you or the sensors come in contact with electric power lines.M AINTAINING THE S ENSOR M OUNTING A RMYou should check the tightness of the various screws and U-bolts periodically.Pay particular attention to the U-bolts holding the anemometer arm in place.T ECHNICAL S UPPORTBefore calling Technical Support (1-510-732-7814), carefully check this instruc-tion manual for the answer to your question.。