交通流理论第二章
《交通流理论 》课件

数值模拟法
定义:通过计 算机程序模拟 交通流现象的
方法
优点:可以模拟 复杂的交通流现 象,包括车辆之 间的相互作用、
道路条件等
缺点:需要较 高的计算能力 和技术水平, 且可能存在误
差
应用:用于研 究交通流的基 本规律、优化 交通设计和控
制等方面
交通流分析与评价方法
交通流流量分析
交通流量定义:单位时间内通过道路某一断面的车辆数 交通流量分类:基本流量、设计流量、实际流量 交通流量调查方法:路边调查、断面调查、连续调查
交通信号优化:通过调整交通 信号的配时方案,减少车辆在 路口的等待时间和延误
智能交通系统应用:利用智能 交通系统技术,实时监测交通
状况,调整交通流分配
交通流控制策略
交通信号控制:通过调整交通信号灯的配时方案,优化交通流分配,减少 拥堵和事故发生率。
智能交通系统:利用先进的技术手段,实时监测交通流量、车速等参数, 为交通管理部门提供决策支持,实现交通流优化与控制。
交通流分析与评价方法在交 通安全与控制中的应用
交通流分析与评价方法介绍
交通流分析与评价方法在环境 保护与可持续发展中的应用
交通流数据的采集与处理
交通流分析与评价方法的发 展趋势与挑战
交通流优化与控制策略
交通流优化方法
道路设计优化:优化道路布局 和设计,提高道路通行能力和 安全性
交通管理优化:加强交通管理, 提高交通运行效率和管理水平
交通组织优化:通过合理规划道路网络、优化交通标志标线等措施,提高 道路通行效率,减少交通冲突。
公共交通优先:通过设置公交专用道、提高公交服务质量等措施,鼓励市 民选择公共交通出行,减少私家车使用,从而优化交通流。
交通流理论第二章
第二章 交通流特性第一节 交通调查交通调查:在道路系统的选定点或选定路段,为了收集有关车辆(或行人)运行情况的数据而进行的调查分析工作。
意义:交通调查对搞好交通规划、道路设施建设和交通管理等都是十分重要的。
调查方法:(1)定点调查;(2)小距离调查(距离小于10m );(3)沿路段长度调查(路段长度至少为500m ); (4)浮动观测车调查; (5)ITS 区域调查。
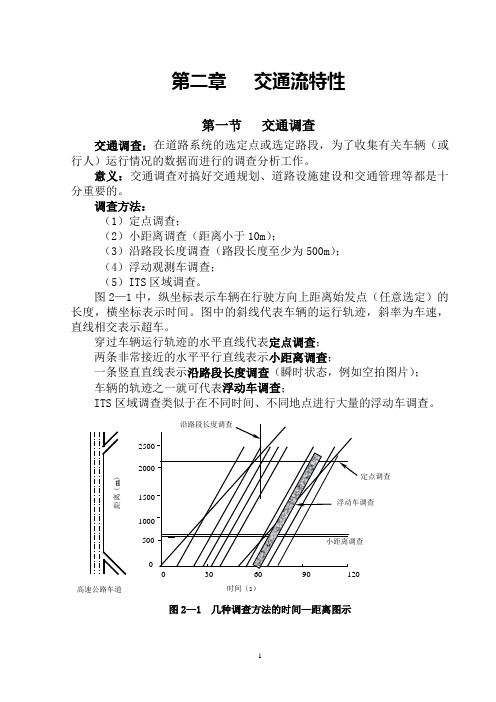
图2—1中,纵坐标表示车辆在行驶方向上距离始发点(任意选定)的长度,横坐标表示时间。
图中的斜线代表车辆的运行轨迹,斜率为车速,直线相交表示超车。
穿过车辆运行轨迹的水平直线代表定点调查; 两条非常接近的水平平行直线表示小距离调查;一条竖直直线表示沿路段长度调查(瞬时状态,例如空拍图片); 车辆的轨迹之一就可代表浮动车调查;ITS 区域调查类似于在不同时间、不同地点进行大量的浮动车调查。
图2—1 几种调查方法的时间—距离图示时间(s )距离(m )高速公路车道一、定点调查定点调查包括人工调查和机械调查两种。
人工调查方法即选定一观测点,用秒表记录经过该点的车辆数。
机械调查方法常用的有自动计数器调查、雷达调查、摄像机调查等。
自动计数器调查法使用的仪器有电感式、环形线圈式、超声波式等检测仪器,它几乎适用于各种交通条件,特别是需要长期连续性调查的路段。
雷达调查法适用于车速高、交通量密度不大的情况。
摄像机调查法一般将摄像机安装在观测点附近的高空处,将镜头对准观测点,每隔一定的时间,如15s、30s、45s或60s,自动拍照一次,根据自动拍摄的照片上车辆位置的变化,清点出不同流向的交通量。
这种方法可以获得较完全的交通资料,如流量、流向、自行车流及行人流和行驶速度、车头时距及延误等。
除这些方法以外,还有航空摄影调查法、光电管调查法等。
定点调查能直接得到流量、速度和车头时距的有关数据,但是无法测得密度。
二、小距离调查这种调查使用成对的检测器(相隔5m或6m)来获得流量、速度和车头时距等数据。
交通流理论及其应用

交通流理论及其应用第一章交通流理论概述交通流理论研究的是交通系统中的车辆运动、交通管制、道路设施、交通信息和旅行者的行为等方面的问题。
交通流理论在道路规划、公路建设和交通管理等领域有着非常广泛的应用。
交通流理论的一个重要假设是,车辆在道路上的移动速度不仅受到道路设计的限制,还受到其他车辆的影响。
因此,在交通流理论中,车辆被看作是一个组成整体的流体,而不是独立的个体。
第二章交通流模型交通流模型是交通流理论的核心部分。
交通流模型通过建立数学方程,来描述交通系统中的车辆运动和相关因素。
常用的交通流模型有三种:宏观模型、微观模型和混合模型。
宏观模型是指从整体上研究交通流的模型,宏观模型的主要参数是车流量、速度和密度。
宏观模型常用的方法包括现场观测、测量和统计分析。
微观模型是指从个体车辆的行为入手研究交通流的模型,微观模型的主要参数是车辆的位置、速度和加速度。
微观模型常用的方法是仿真模拟和建立基于车辆运动方程的数学模型。
混合模型是宏观模型和微观模型的结合,既考虑了交通流的整体特征,又考虑了车辆个体行为的影响。
混合模型综合了宏观模型和微观模型的优点,是目前研究交通流的主要方法之一。
第三章交通流参数交通流参数是交通流模型中的重要参数,主要包括车流量、速度和密度。
车流量是单位时间内通过某一道路断面的车辆数量,常用的单位是辆/小时。
车流量是衡量交通流量大小的主要指标,它直接影响道路的通行能力和交通拥堵的程度。
速度是车辆在单位时间内通过某一道路断面的平均速度,常用的单位是公里/小时。
速度是衡量交通流运行状况的主要指标,它受到道路状况、车辆性能和交通运行管理等因素的影响。
密度是单位时间内通过某一道路断面的车辆数量和车辆行驶长度之比,常用的单位是辆/公里。
密度是衡量交通流集聚程度的主要指标,它与车速和车流量有着密切的关系。
第四章交通流控制交通流控制是交通流理论的一项重要应用,包括交通信号灯、路口红绿灯、限速标志和车道指示标志等。
交通流理论第二章
交通流理论第⼆章第⼆章交通流特性第⼀节交通调查交通调查:在道路系统的选定点或选定路段,为了收集有关车辆(或⾏⼈)运⾏情况的数据⽽进⾏的调查分析⼯作。
意义:交通调查对搞好交通规划、道路设施建设和交通管理等都是⼗分重要的。
调查⽅法:(1)定点调查;(2)⼩距离调查(距离⼩于10m );(3)沿路段长度调查(路段长度⾄少为500m );(4)浮动观测车调查;(5)ITS 区域调查。
图2—1中,纵坐标表⽰车辆在⾏驶⽅向上距离始发点(任意选定)的长度,横坐标表⽰时间。
图中的斜线代表车辆的运⾏轨迹,斜率为车速,直线相交表⽰超车。
穿过车辆运⾏轨迹的⽔平直线代表定点调查;两条⾮常接近的⽔平平⾏直线表⽰⼩距离调查;⼀条竖直直线表⽰沿路段长度调查(瞬时状态,例如空拍图⽚);车辆的轨迹之⼀就可代表浮动车调查;ITS 区域调查类似于在不同时间、不同地点进⾏⼤量的浮动车调查。
图2—1 ⼏种调查⽅法的时间—距离图⽰时间(s )距离(m )⾼速公路车道⼀、定点调查定点调查包括⼈⼯调查和机械调查两种。
⼈⼯调查⽅法即选定⼀观测点,⽤秒表记录经过该点的车辆数。
机械调查⽅法常⽤的有⾃动计数器调查、雷达调查、摄像机调查等。
⾃动计数器调查法使⽤的仪器有电感式、环形线圈式、超声波式等检测仪器,它⼏乎适⽤于各种交通条件,特别是需要长期连续性调查的路段。
雷达调查法适⽤于车速⾼、交通量密度不⼤的情况。
摄像机调查法⼀般将摄像机安装在观测点附近的⾼空处,将镜头对准观测点,每隔⼀定的时间,如15s、30s、45s或60s,⾃动拍照⼀次,根据⾃动拍摄的照⽚上车辆位置的变化,清点出不同流向的交通量。
这种⽅法可以获得较完全的交通资料,如流量、流向、⾃⾏车流及⾏⼈流和⾏驶速度、车头时距及延误等。
除这些⽅法以外,还有航空摄影调查法、光电管调查法等。
定点调查能直接得到流量、速度和车头时距的有关数据,但是⽆法测得密度。
⼆、⼩距离调查这种调查使⽤成对的检测器(相隔5m或6m)来获得流量、速度和车头时距等数据。
第2章 交通流理论基础知识
3、交通量三参数之间关系的应用 、
实施效果: 实施效果: 收费区域交 通量减少了 22%; ; 交通事故降 低5~10%; ; 公交利用率 大幅提高, 大幅提高, 增减了16条 增减了 条 公交线路和 200多辆公交 多辆公交 车。
斯德哥尔摩拥挤收费区域示意图( 年以来) 斯德哥尔摩拥挤收费区域示意图(2007年以来) 收费区域示意图 年以来
南京市: 南京市:龙蟠南路路段
800 600 400 200 0 0 10 20 k (pcu /km /lane ) 30 q (pcu /h /lane ) lane
2min 2min 5min 5min 15min
Underwood Greenberg Underwood Greenberg Underwood
2、交通流三参数之间的关系 、 2、停车场布局原则
(5) 流量 速度之间的关系 流量-速度之间的关系 (1)
70
南京市: 南京市:龙蟠南路路段
60 v(km /h ) h 50 40 30 20 0 200 400 q (pcu /h /lane) 600 800 2min Underwood 2min Greenberg 5min Underwood 5min Greenberg 15min Underwood
服务水平分级:行车速度、行车安全性、舒适性、经济性。 服务水平分级:行车速度、行车安全性、舒适性、经济性。 各国划分不一。 各国划分不一。
美 国
通行能力计算
可能通行能力
N 可能 = 3600 / ti N 可能 = (3600 / ti ) ⋅ α 交叉口
ti——平均车头时距(根据 查表); 平均车头时距( 查表); 平均车头时距 根据v查表 α交叉口——平面交叉口修正系数 平面交叉口修正系数
交通流理论第二章交通行为第二节ppt

该图表可能无法估计在紧急时刻的感觉—反应时 间,比如观察时间会突然增加。
参数λ、ξ决定了分布状况,与感觉—反应时 间样本数据的均值μ和标准差σ有关:
2 2 ln(1 2 )
ln(
1 /
2 2
)
与λ相关的标准值为:
ln(T )
Z
勒纳(Lerner)等人通过总结制动感觉—反应时 (包括制动开始),分析了两类反应: (1)驾驶员不知道什么时候开始制动,甚至不知道是否 制动; (2)驾驶员预先知道制动信号到来,但不知道确切的时 间。 •
• 霍弗曼发现踏板的垂直距离对移动时间(MT)有很大影 响,而参数A的变化对移动时间(MT)的影响相对较小。
• 移动时间长度与感觉—反应时间无关,也就是说感觉— 反应时间长,而移动反应时间却不一定长。应当指出, 反应时间不单指快慢,而且驾驶人要动作正确。驾驶人 没有权利为了避免撞车而不考虑采取的措施如何,一味 的求快,这样会招致更为严重的后果。在混合交通的条 件下,能在最危险的情况下正确、冷静、迅速的作出反 应是驾驶人的必备品质。
4.2.2驾驶行为影响因素
1、对交通控制设备的反应时间和距离 在行车过程中,驾驶人需要感知外界各种交通信息。在感 觉器官给驾驶员提供的交通信息量中,视觉所占的比重最大, 达到80%。因此视觉是最重要的,透过车厢玻璃观测到的客 观信息构成了驾驶人需要处理的主要信息,其中交通控制设 备(TCD)提供的信息是影响驾驶人并且对于交通流理论研 究者也非常重要的一个方面。 交通控制设备(TCD)的主要问题和他们的距离有关,包 括方面如下三个: (1)在视野中作为目标被发觉; (2)确认为交通控制设备(交通标志、交通信号或路障等); (3)清晰且易于辨认和理解。
交通流理论课件11(1,2)

交通流理论(traffic flow theory)
交通流理论(traffic flow theory)
交通流理论(traffic flow theory)
交通流理论(traffic flow theory)
交通流理论发展阶段
阶段 时间 起源 19世 纪初 快读 30-50 发展 年代 稳步 近代 发展 现代 90后 理论 主要思想和方法 格林希尔治模型 跟驰模型、交通 波、排队论、连 续流模型 可插车理论、延 误模型 模糊、系统论等 代表人物 格林希尔治 伊迪、沃德洛尔、鲁 契尔、惠特汉、韦伯 斯伯特等 米勒等
交通流理论(traffic flow theory)
本章小结
重点掌握:
•
• •
• •
•
1)概念:交通流、交通流理论
2)交通流理论的研究内容 3)交通流理论发展的三个阶段
1)课程的意义、要求和考核方式 2)交通理论研究的作用
熟悉:
了解:
1)交通流理论的起源和发展过程 • 2)交通流理论体系和发展趋势
35 40 8
流率 15
时间 4045 间隔 9
18
4550 10
21
5055 11
2
55+00 12
25
+0005 13
26
0510 14
29
1015 15
1
1520 16
流率 28
时间 2025
11
2530
26
3035
8
3540
28
4045
26
4550
6
5055
12
5500
间隔 17
流率 28
交通流理论
用样本的均值m代替M、样本的方差S2代替D,即可算出负指数分布
的参数λ。 此外,也可用概率密度函数来计算。负指数分布的概率密度函数为:
P(t )
d d P(h t ) [1 P(h t )] e t dt dt
P(h t ) p(t )dt et dt et
跟驰条件(车速条件、间距条件)
2. 延迟性 (也称滞后性)
3. 传递性
二. 线性跟驰模型
s(t ) d1 d2 L - d3
假定d2=d3,要使在时刻t两车的间距能 保证在突然剥车事件中不发生幢碰,则应 有:
对于跟驰车辆的反应,一般指加速、减速,因此,将 上式微分,得到 :
. . ( t T ) X ( t ) X ( t ) n n 1 X n1 ..
道路上一辆跟踪另一辆车的追随现象是很多的, 前一辆车行驶速度的变化,影响后一辆车行驶,后 一辆车为了与前车保持具有最小安全间隔距离。需 要调整车速,这种前后车辆运动过程可以应用动力 学跟踪理论,建立道路上行驶车辆流动线性微分方 程式来分析车辆行驶情况和变化规律。这种研究方 法称为交通跟驰理论。
(3)应用条件
1 N 1 g 2 2 S ( k m ) ( k m ) fj i j N 1 i 1 N 1 j 1
2
2. 二项分布
(1)基本公式
k P ( k ) Cn (
t
n
) k (1
t
n
) nk ,
k 0,1,2, , n
式中:P(k)——在计数间隔t内到达k辆车或k个人的概率; λ——平均到达率(辆/s或人/s); t——每个计数间隔持续的时间(s)或距离(m);
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二章 交通流特性第一节 交通调查交通调查:在道路系统的选定点或选定路段,为了收集有关车辆(或行人)运行情况的数据而进行的调查分析工作。
意义:交通调查对搞好交通规划、道路设施建设和交通管理等都是十分重要的。
调查方法:(1)定点调查;(2)小距离调查(距离小于10m );(3)沿路段长度调查(路段长度至少为500m ); (4)浮动观测车调查; (5)ITS 区域调查。
图2—1中,纵坐标表示车辆在行驶方向上距离始发点(任意选定)的长度,横坐标表示时间。
图中的斜线代表车辆的运行轨迹,斜率为车速,直线相交表示超车。
穿过车辆运行轨迹的水平直线代表定点调查; 两条非常接近的水平平行直线表示小距离调查;一条竖直直线表示沿路段长度调查(瞬时状态,例如空拍图片); 车辆的轨迹之一就可代表浮动车调查;ITS 区域调查类似于在不同时间、不同地点进行大量的浮动车调查。
图2—1 几种调查方法的时间—距离图示时间(s )距离(m )高速公路车道一、定点调查定点调查包括人工调查和机械调查两种。
人工调查方法即选定一观测点,用秒表记录经过该点的车辆数。
机械调查方法常用的有自动计数器调查、雷达调查、摄像机调查等。
自动计数器调查法使用的仪器有电感式、环形线圈式、超声波式等检测仪器,它几乎适用于各种交通条件,特别是需要长期连续性调查的路段。
雷达调查法适用于车速高、交通量密度不大的情况。
摄像机调查法一般将摄像机安装在观测点附近的高空处,将镜头对准观测点,每隔一定的时间,如15s、30s、45s或60s,自动拍照一次,根据自动拍摄的照片上车辆位置的变化,清点出不同流向的交通量。
这种方法可以获得较完全的交通资料,如流量、流向、自行车流及行人流和行驶速度、车头时距及延误等。
除这些方法以外,还有航空摄影调查法、光电管调查法等。
定点调查能直接得到流量、速度和车头时距的有关数据,但是无法测得密度。
二、小距离调查这种调查使用成对的检测器(相隔5m或6m)来获得流量、速度和车头时距等数据。
目前常用的点式检测器,如感应线圈和微波束。
调查地点车速时,将前后相隔一定距离(如5m)的检测器埋设地下,车辆经过两个检测器时发出信号并传送给记录仪,记录仪记录车辆通过两个检测器所使用的时间,那么用相隔的距离除以时间就得到地点车速。
这种调查方法还能得到占有率,占有率是指检测区域内车辆通过检测器的时间占观测总时间的百分比。
由于占有率与检测区域的大小、检测器的性质和结构有关,因此同样的交通状态下,不同位置测得的占有率可能不同。
小距离调查同样无法测得密度,但可获得流量、速度、车头时距和占有率等数据。
三、沿路段长度调查沿路段长度调查主要是指摄像调查法,适用于500m以上的较长路段。
摄像调查法首先对观测路段进行连续照像,然后在所拍摄的照片上直接点数车辆数,因此这种方法是调查密度的最准确途径。
但是,由于拍摄胶片的清晰度受天气情况影响较大,调查时应注意选择晴朗的时间。
摄像调查法分为地面高点摄像法和航空摄像法。
这种方法能够测得密度,但由于调查中没有给出时间刻度,因此不能得到流量和速度。
四、浮动车调查浮动观测车调查有两种方法:第一种方法:是利用浮动车记录速度和行程时间(分别作为时间和沿路段位置的函数),浮动车以车流的近似平均速度行驶。
该方法无需精密的仪器就可获得大量有关高速公路车流运动的信息,但是不能获得准确的平均速度。
这种方法有两种常用的形式:一种是人在车上记录速度和行程时间;另一种是使用速度计(通常用于远距离行驶的卡车和公共汽车上)。
第二种方法:可同时进行速度和流量的调查,该方法适用于不拥挤的道路和无自动检测仪器的郊区高速公路。
这种调查方法基于观测车在道路上进行往返行驶,其计算流量和速度的公式如下:)/()(w a t t y x q ++= (2—1) q y t t w /-= (2—2) t l u s /= (2—3) 式中:q ——道路上参考方向的估计交通量;x ——观测车沿参考方向反向行驶时遇到的车辆数;——观测车沿参考方向行驶时的净超车数(即超越观测车的车辆数减去被观测车超越的车辆数);a t ——车辆沿参考方向反向行驶时的行程时间; w t ——车辆沿参考方向行驶时的行程时间;t ——车辆沿参考方向行驶时的平均行程时间的估计值; ——路段长度;s u ——区间平均速度。
进行调查时,驾驶员应事先固定行程时间,试验中要按照这个时间行驶,沿路段允许停车,但要保证整个行程时间跟预定的时间相等。
总的行程时间,根据美国国家城市运输委员会的规定,主要道路为19min/km ,次要道路为6min/km ,一般往返12~16次,即可得到满意的结果。
另外,转弯车辆(离开和进入)会影响计算结果,因此进行这种调查所选择的路段应该尽量避开主要的进出口。
五、ITS 区域调查智能运输系统包含诱导车辆与中枢系统的通信技术,这可提供车辆的速度信息。
但是,通过智能运输系统获得的车速信息有的情况是记录点的瞬时速度,有的情况仅是车辆的标识信号(系统根据接收的相邻信号计算出车辆的行程时间),还有的情况是通过一些固定于路旁的信号发射装置(通常称为信标)向车辆发送信号,车辆接收信号进行登记,并向中枢系统返回速度和位置信息。
该方法只能提供速度信息,而无法确定车辆所在路段的流量和密度。
如果配以适当的传感器,每一辆诱导车都能记录车头时距和车头间距,那么就可以通过这些数据求得流量和密度。
第二节 交通流参数道路上的行人或运行的车辆构成行人流或车流,行人流和车流通称为交通流,没有特指时交通流一般指机动车流。
交通流运行状态的定性、定量特征称为交通流特性,用以描述交通流特性的一些物理量称为交通流参数,参数的变化规律即反映了交通流的基本性质。
交通流的基本参数有三个:交通流量、速度和密集度,也称为交通流三要素,常用的参数还有车头时距、车头间距等。
一、流 量流量是指在单位时间内,通过道路某一点、某一断面或某一条车道的交通实体数(对于机动车流而言就是车辆数)。
流量可通过定点调查直接获得,流量和车头时距有以下关系:TNq =(2—4) 式中:q ——流量(veh/h );T ——观测时段长度;N ——观测时段内的车辆数。
观测时段长度和车头时距有如下关系:∑==Ni i h T 1 (2—5)式中:i h —— 第1+i 辆车与第i 辆车的车头时距。
将式(2—5)代入式(2—4),就得到流量和平均车头时距之间的关系:hh N h N T N q ii ii 111====∑∑ (2—6)式中:h ——平均车头时距。
二、速 度1.地点速度(也称为即时速度、瞬时速度)地点速度u 为车辆通过道路某一点时的速度,公式为: 1212012lim t t x x dt dxu t t --==→- (2—7)式中1x 和2x 分别为时刻1t 和2t 的车辆位置。
雷达和微波调查的速度非常接近此定义。
车辆地点速度的近似值也可以通过小路段调查获得(通过间隔一定距离的感应线圈来调查)。
2.平均速度(1)时间平均速度t u ,就是观测时间内通过道路某断面所有车辆地点速度的算术平均值:∑==Ni i t u N u 11 (2—8)式中:i u ——第i 辆车的地点速度;N ——观测的车辆数。
(2)区间平均速度s u ,有两种定义:一种定义为车辆行驶一定距离D 与该距离对应的平均行驶时间的商:∑==Ni is tND u 11 (2—9)式中:i t ——车辆i 行驶距离D 所用的行驶时间。
ii u Dt =(2—10) 式中:i u ——车辆i 行驶距离D 的行驶速度。
式(2—9)适用于交通量较小的条件,所观察的车辆应具有随机性。
对式(2—9)进行如下变形:∑∑∑===i ii itis u N u D N D tND u 11111 (2—11)此式表明区间平均速度是观测路段内所有车辆行驶速度的调和平均值。
区间平均速度的另一种定义为某一时刻路段上所有车辆地点速度的平均值。
可通过沿路段长度调查法得到:以很短时间间隔t ∆对路段进行两次(或多次)航空摄像,据此得到所有车辆的地点速度(近似值)和区间平均速度,公式如下:t S u ii ∆= (2—12)∑∑==∆=∆=Ni i N i i s S t N t S N u 1111 (2—13)式中:i u ——第i 辆车平均速度;t ∆——两张照片的时间间隔;i S ——在t ∆间隔内,第i 辆车行驶的距离。
研究表明,这种方法获得的速度观测值的统计分布与实际速度的分布是相同的。
(3)时间平均速度和区间平均速度的关系对于非连续交通流,例如含有信号控制交叉口的路段或严重拥挤的高速公路上,区分这两种平均速度尤为重要,而对于自由流,区分这两种平均速度意义不大。
当道路上车辆的速度变化很大时,这两种平均速度的差别非常大。
时间平均速度和区间平均速度的关系如下:ss s t u u u 2σ=- (2—14)式中:K u u k s i i s /)(22∑-=σ;i k ——第i 股交通流的密度; K ——交通流的整体密度。
三、密集度密集度(concentration )包括占有率和密度两种含义。
(一)占有率占有率o 即车辆的时间密集度,就是在一定的观测时间T 内,车辆通过检测器时所占用的时间与观测总时间的比值。
对于单个车辆来说,在检测器上花费的时间是由单个车辆的速度i u ,车长i l 和检测器本身的长度d 决定的:∑∑∑+=+=i ii i i ii i u T d u l T T u d l o 11/)( (2—16)将上式第二项的分子分母同时乘以N ,再将式(2—4)和式(2—11)代入可得:si i i i i i i i u qd u l T u N T N d u l T o ⋅+=⋅⋅+=∑∑∑1111 (2—17) 将基本公式:s u k q = (2—18)代入式(2—17):k d u l T o i ii ⋅+=∑1(2—19)其中T 是车头时距的总和,k 为密度。
将上式的分子分母同时除以N 得:k d hu l N k d h Nu l N k d T u l o i i i ii i i i i i ⋅+=⋅+=⋅+=∑∑∑∑1`11 (2—20) 如果假定车身长度取定值l ,那么上式可简化为:∑∑⋅+⋅⋅=⋅+=i i i ik d u N l hk d h u l No 1111k c k d l k d u q l k s=+=⋅+⋅=)( (2—21) 式中:k c ——车身长度与检测器长度之和。
由于单个检测器的长度d 是恒定的, 如果假定车辆长度也相同,那么该式表明占有率与密度是成正比的,由此可得如下的区间平均速度计算公式:oc q u ks ⋅= (2—22)(二)密度交通密度k 代表车辆的空间密集度,就是某一瞬间单位道路长度上存在的车辆数,即:L K 观测路段长度车辆数交通密度N/=密度只能通过沿路段长度调查法即根据航拍照片来获得:根据图上量得的距离和车辆数计算得出。