人机工效学风险评估
人机工效分析工具应用范围及局限性
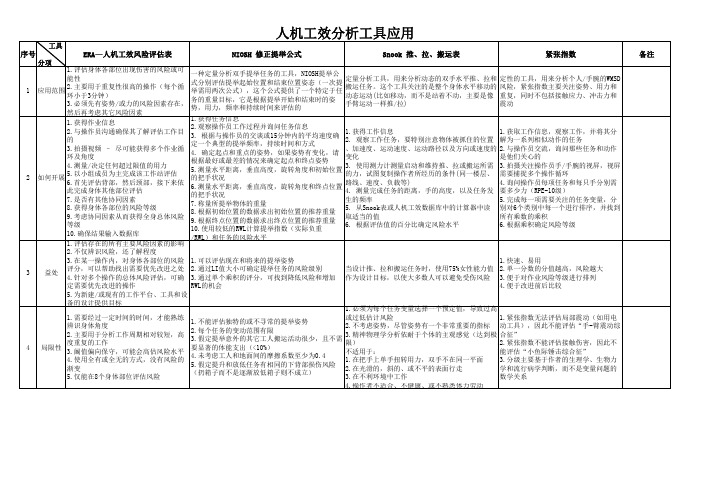
当设计推、拉和搬运任务时,使用75%女性能力值 2.单一分数的分值越高,风险越大 作为设计目标,以使大多数人可以避免受伤风险 3.便于对作业风险等级进行排列
定需要优先改进的操作
RWL的机会
4.便于改进前后比较
5.为新建/或现有的工作平台、工具和设
备的设计提供目标
1.必须为每个任务变量选择一个预定值,导致过高
的
3.拍摄视频 – 尽可能获得多个作业循
环及角度
4.测量/决定任何超过限值的用力
如何开展
5.以小组成员为主完成该工作站评估 6.首先评估背部,然后颈部,接下来依
此完成身体其他部位评估
7.是否有其他协同因素
8.获得身体各部位的风险等级
9.考虑协同因素从而获得全身总体风险
等级
10.确保结果输入数据库
1.获得任务信息
/RWL)和任务的风险水平
1.评估存在的所有主要风险因素的影响பைடு நூலகம்
2.不仅辨识风险,还了解程度
3.在某一操作内,对身体各部位的风险 1.可以评估现在和将来的提举姿势
1.快速、易用
3
益处
评分,可以帮助找出需要优先改进之处 2.通过LI值大小可确定提举任务的风险级别 4.针对多个操作的总体风险评估,可确 3.通过单个乘积的评分,可找到降低风险和增加
4
1.需要经过一定时间的时间,才能熟练
辨识身体角度
2.主要用于分析工作周期相对较短,高
局限性
度重复的工作 3.阚值偏向保守,可能会高估风险水平
4.使用全有或全无的方式,没有风险的
渐变
5.仅能在8个身体部位评估风险
1.不能评估独特的或不寻常的提举姿势 2.每个任务的变动范围有限 3.假定提举意外的其它工人搬运活动很少,且不需 要显著的体能支出(<10%) 4.未考虑工人和地面间的摩擦系数至少为0.4 5.假定提升和放低任务有相同的下背部损伤风险 (扔箱子而不是逐渐放低箱子则不成立)
机器人风险评价
机器人风险评价一、背景介绍机器人技术的快速发展和广泛应用为各行各业带来了便利和效益,但同时也引发了一系列的风险和安全问题。
为了确保机器人的安全性和可靠性,进行机器人风险评价是至关重要的。
二、风险评价的目的机器人风险评价的目的是识别、评估和控制机器人使用过程中可能存在的风险,以保障人员和环境的安全。
通过风险评价,可以及时发现和解决潜在的风险问题,减少事故发生的可能性,提高机器人的可靠性和安全性。
三、风险评价的步骤1. 风险识别风险识别是风险评价的第一步,通过对机器人的设计、使用和维护等方面进行全面的分析,识别潜在的风险源。
例如,机器人的运动部件可能存在夹伤风险,机器人的电气系统可能存在触电风险等。
2. 风险评估风险评估是对已识别的风险进行定量或定性的评估,确定其可能性和严重程度。
评估方法可以采用风险矩阵、风险指数等。
例如,对于夹伤风险,可以评估其可能性为高,严重程度为中等。
3. 风险控制风险控制是在风险评估的基础上,制定和实施相应的控制措施,降低风险的发生概率和严重程度。
控制措施可以包括技术措施、管理措施和人员培训等。
例如,对于夹伤风险,可以采用安全防护装置、安全警示标识等控制措施。
4. 风险监控风险监控是对已实施的风险控制措施进行监测和评估,确保其有效性和持续性。
监控可以通过定期检查、维护记录等方式进行。
例如,定期检查安全防护装置的运行情况,记录并分析机器人事故和故障的发生情况。
四、风险评价的参考指标1. 机器人的功能安全性评估机器人是否满足相关的功能安全标准,包括硬件和软件的安全性设计,以及故障检测和容错能力等。
2. 机器人的操作安全性评估机器人的操作界面是否符合人机工程学原理,是否易于操作和控制,以及是否提供足够的安全警示和紧急停止功能等。
3. 机器人的环境适应性评估机器人在不同环境条件下的适应性和安全性,包括温度、湿度、气压等环境因素的影响。
4. 机器人的安全培训和使用规范评估机器人的操作人员是否接受过相关的安全培训,是否按照使用规范进行操作,以及是否具备应急处理能力等。
人机工程风险评估指南
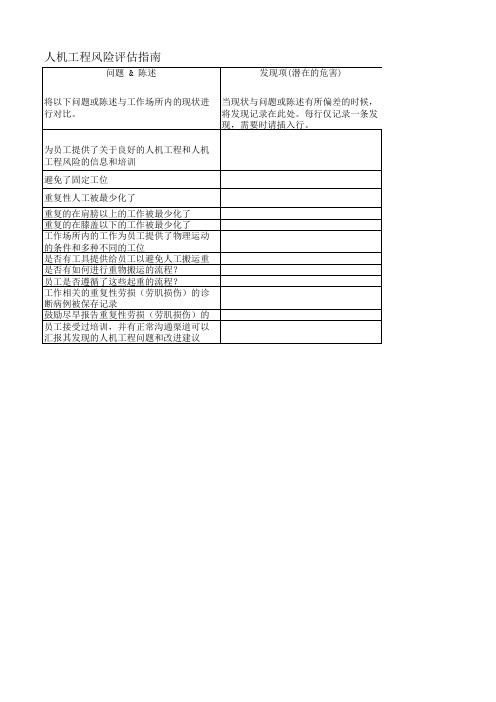
问题 & 陈述 将以下问题或陈述与工作场所内的现状进 行对比。 发现项(潜在的危害) 当现状与问题或陈述有所偏差的时候, 将发现记录在此处。每行仅记录一条发 现,需要时请插入行。
为员工提供了关于良好的人机工程和人机 工程风险的信息和培训 避免了固定工位 重复性人工被最少化了 重复的在肩膀以上的工作被最少化了 重复的在膝盖以下的工作被最少化了 工作场所内的工作为员工提供了物理运动 的条件和多种不同的工位 是否有工具提供给员工以避免人工搬运重 是否有如何进行重物搬运的流程? 员工是否遵循了这些起重的流程? 工作相关的重复性劳损(劳肌损伤)的诊 断病例被保存记录 鼓励尽早报告重复性劳损(劳肌损伤)的 员工接受过培训,并有正常沟通渠道可以 汇报其发现的人机工程问题和改进建议
风险评级 (没有明显的风险)=1 (可容忍的风险)需要不止一项行动/措施。注意每行内 仅记录一项活动,必要时应插入新的一行。思考 - 我们怎样做 可以尽快降低风险,即采取纠正措施;然后进一步思考怎样做可 以消除风险,即采取预防措施。
以OCRA进行的人机工程学风险评估

以OCRA进行的人机工程学风险评估目标:了解人机工程学的风险指数,通过必要的步骤来分析和回顾工作中的人机工程学,在对以下状况进行决策时重点考虑重复作业,比如:过程、任务、工作场所或环境变化;事故调查;控制措施介绍或变更;不合格分析;检查、新法规或有关方的要求等。
1.通过将某一任务登记在指定的表单里来标识该任务。
2.对工作场所进行描述以作参考:采用符合人机工程学风险分析的方法完成对工作场所和任务的简要描述。
3.定义重复任务的持续时间填入表格。
4.根据标准,选择工作时的停顿情况填入表格。
5.选择进行周期性的手臂活动和工作频率,填入表格,应包括左右手臂的活动。
6.根据标准,选择在工作中反复使用双手的活动,在每个任务周期中至少有一次手部重复用力。
7.根据标准,在重复的任务中识别上肢的不协调姿势。
8.根据标准,确定存在的附加风险因素。
9.通过对停顿、频率、姿势和附加风险因素的数值进行调整,乘以该重复任务的净持续时间,就可以得到人机工程学的风险指数。
10.根据下表和所得的风险指数,就可以得出该项活动的人机工程学的风险等级。
Ergonomics Risk Assessment by using OCRAOBJECTIVES: Understand the ergonomic risk index and present the necessary steps to analyze and review the ergonomics considering repetitive tasks on day-to-day decision making mainly in the following situations: process, task, workplace or environment change; incident investigation; control measure introduction or change; non conformities analysis; inspection, new legislation or interested party demands, etc.1.Identify the task by registering it into the appropriated form.2.Provide workplace description and reference: produce a brief description of the workplace andtask indicating adopted methodology to support the ergonomic risk evaluation.3.Define the net duration of repetitive task multiplier and indicate it in the appropriate form field.4.Select the situation of work interruption according to the following criteria and type themultiplier in the appropriate register field.5.Select arm activity and working frequency with which the cycles are performed. Type themultiplier in the appropriate form field considering right and left arm activity.6.Select the presence of working activities involving the repeated use of force in the hands-arms,at least once every few cycles during all the analyzed task, according to the criteria.7.Identify the presence of awkward postures in the upper limbs during repetitive tasks according tothe criteria.8.Identify the presence of additional risk factors according to the criteria.9.Final risk evaluation is obtained by adding the results of Pause, Frequency, Posture plusAdditional risk factors and multiplying this sum by Net repetitive task duration factor result.10.Risk classification is obtained according to the final risk evaluation as follows:。
基于人机工程学的风险评估与管理研究

基于人机工程学的风险评估与管理研究近年来,随着信息技术的飞速发展,各种新型风险不断涌现,给人们的生产和生活带来了无法预测的隐患。
如何在不断变化的环境中对风险进行科学、高效的评估与管理,是亟待研究的重要问题之一。
基于人机工程学的风险评估与管理研究,以其面向人类的科学设计理念、多维度的数据采集和分析方法,成为了当前最重要的研究方法之一。
一、基于人机工程学的风险评估与管理概述人机工程学,又称人机交互学、人因工程学,是研究人类与机器系统相互作用及其设计原理的一门学科。
基于人机工程学的风险评估与管理,是指在科学的人机工程学原理基础上,对风险进行科学、高效评估与管理的过程。
其主要思路是以人为中心,从人机交互的角度出发,全面分析人、环境和机器之间相互作用的复杂关系,并结合多种数据分析方法,实现对风险的科学评估与有效管理。
二、基于人机工程学的风险评估与管理方法与流程1、风险评估方法基于人机工程学的风险评估,主要采用方法有故事板法、操作任务分析法、行为事件技术法、头脑风暴法等。
其中,故事板法是一种基于场景模拟的方法,可以模拟出实际生产和生活环境中可能发生的各种风险事件,从而帮助评估人的行为和机器响应的有效性;操作任务分析法则主要从人的认知和操作层面出发,通过对人员进行任务分析,评估人员操作中可能存在的危险性;行为事件技术法则更侧重于人的行为特征和态度分析,通过对人的行为事件抽象和概括,来评估人的行为和机器响应的效果。
2、风险管理流程基于人机工程学的风险管理,一般包括风险识别、风险评估、风险控制、风险监控和风险溯源等环节。
风险识别是指通过各种信息来源和方法,识别并确定可能存在的风险;风险评估则是依据评估方法,对风险进行科学评估,并给出风险等级;风险控制是依据评估结果,对风险进行合理安排和控制;风险监控是及时识别和控制风险所需的信息收集、分析和反馈;风险溯源则是对已经发生的不良事件,进行计算机辅助风险溯源,追寻和分析事件根源。
医疗器械安全使用评估方法与应用
医疗器械安全使用评估方法与应用随着现代医学科技的不断发展,医疗器械在医疗领域中扮演着至关重要的角色。
然而,医疗器械的使用安全性一直都是人们十分关注的问题。
为了确保医疗器械的安全性,医疗机构和相关方面制定了一系列的医疗器械安全使用评估方法和应用。
本文将深入探讨其中的一些方法和其在实际中的应用。
一、背景介绍医疗器械安全使用评估是指通过对医疗器械的性能、材料、设计、制造、使用等方面进行全面评估,以保障医疗器械的质量和使用的安全性。
这其中包括了多种方法和工具的使用,以确保医疗器械在临床实践中的安全性和有效性。
二、风险评估方法风险评估是医疗器械安全评估的重要环节。
下面是一些常见的医疗器械风险评估方法:1.风险矩阵法:将医疗器械的潜在风险与其可能造成的影响进行矩阵化的评估,从而确定不同风险等级。
2.失效模式与影响分析(Failure Mode and Effects Analysis,FMEA):通过对医疗器械的失效模式及其对患者的影响进行分析,以确定风险等级。
3.故障树分析(Fault Tree Analysis,FTA):通过分析设备失效可能的根本原因,建立故障树模型,进而评估风险的发生概率。
4.危害控制点分析(Hazard Critical Control Points,HCCP):借鉴食品安全的危害分析与关键控制点的思想,对医疗器械风险进行评估。
三、使用评估方法医疗器械的使用评估是指对医疗器械在实际应用过程中的安全性和有效性进行评估。
以下是一些常见的医疗器械使用评估方法:1.用户体验评估:通过对用户的访谈、调查问卷等方式,评估医疗器械在用户使用过程中的易用性和满意度,以及用户对器械性能的感受。
2.人机工效学评估:通过模拟实际操作场景,评估医疗器械在使用过程中对操作人员的影响,包括操作的简便性、工作效率、人机交互等。
3.临床试验评估:以人体为对象,通过临床试验的方式评估医疗器械的疗效和安全性。
4.意外事件分析:对医疗器械使用过程中的意外事件进行事故分析,识别其中的安全隐患和风险,以及应对措施。
机器人风险评价

机器人风险评价一、背景介绍机器人作为一种新兴的智能设备,已经广泛应用于各个领域,包括工业生产、医疗服务、军事应用等。
然而,机器人的使用也带来了一系列的风险和安全隐患。
为了确保机器人的安全性和可靠性,对机器人进行风险评价是非常必要的。
二、风险评价的目的机器人风险评价的目的是识别和评估机器人使用过程中可能存在的风险,为制定相应的风险控制措施提供依据。
通过风险评价,可以降低机器人使用过程中的事故发生概率,减少人身伤害和财产损失。
三、风险评价的内容1. 确定机器人的使用环境:包括机器人所处的场所、工作条件、周围设备等。
不同的使用环境会对机器人的风险产生不同的影响。
2. 识别潜在的风险源:通过对机器人的结构、功能、工作原理等进行分析,确定可能导致事故和伤害的潜在风险源。
3. 评估风险的严重程度:根据风险的概率和后果,对各个风险源进行评估,确定风险的严重程度。
4. 制定风险控制措施:根据评估结果,制定相应的风险控制措施,包括技术措施、管理措施和培训措施等。
5. 风险监控和管理:对机器人的使用过程进行监控和管理,及时发现和处理潜在的风险。
四、风险评价的方法和工具1. 设计审查:对机器人的设计方案进行审查,评估设计是否满足相关的安全标准和规范要求。
2. 风险矩阵分析:将风险的概率和后果进行量化,建立风险矩阵,确定风险的严重程度。
3. 故障模式与影响分析(FMEA):通过分析机器人的故障模式和故障对系统性能的影响,确定风险源和风险控制措施。
4. 人机工效学评估:评估机器人与人的交互过程中可能存在的风险和错误。
5. 安全标准和规范参考:参考相关的安全标准和规范,对机器人的风险进行评估和控制。
五、风险评价的结果和应用1. 风险评价报告:根据评估结果,编制风险评价报告,详细描述机器人使用过程中可能存在的风险和相应的控制措施。
2. 风险控制措施的实施:根据评估报告,制定和实施相应的风险控制措施,确保机器人使用过程中的安全性和可靠性。
医疗器械使用风险评估方法

医疗器械使用风险评估方法随着医疗技术的不断发展和医疗器械的广泛应用,人们对医疗器械的使用安全性和有效性越来越关注。
为了确保医疗器械的正常运行和患者的安全,进行医疗器械使用风险评估就显得尤为重要。
本文将介绍医疗器械使用风险评估的方法和流程。
一、概述医疗器械使用风险评估是指通过对医疗器械在使用过程中可能产生的风险进行分析和评估,从而确定相应的风险控制措施的过程。
它不仅有助于发现和识别潜在的风险因素,还可以制定相应的预防和控制措施,从而保障医疗器械的安全性和可靠性。
二、医疗器械使用风险评估流程1. 风险辨识首先需要对医疗器械的使用环境和使用流程进行全面的了解和分析,辨识可能存在的风险因素。
这包括器械设计、使用方法、操作人员、环境条件等多个方面。
2. 风险分析针对辨识出的风险因素,进行详细的分析。
可以采用有系统的方法,如故障模式与影响分析(FMEA)等,对可能出现的各种故障和影响进行评估。
3. 风险评估根据风险分析的结果,对每种风险进行评估,确定其可能的严重程度和发生概率。
可以采用定性或定量的方法进行评估,如风险矩阵等。
4. 风险控制措施根据风险评估的结果,确定相应的风险控制措施。
这些措施可以包括改进器械设计、加强操作规范、培训操作人员、改善环境条件等。
5. 风险监控和管理在医疗器械使用过程中,需要进行持续的风险监控和管理。
这包括定期的风险评估、风险控制效果的评估、及时报告和处理风险事件等。
三、常用的1. 事件树分析(ETA)事件树分析是一种常用的定性风险分析方法。
它通过建立一个树状图,将各种可能的事件和影响串联起来,用于评估事件发生的概率和严重程度。
2. 故障模式与影响分析(FMEA)故障模式与影响分析是一种常用的风险评估工具。
它通过系统地考虑可能的故障模式和其对系统性能的影响,评估故障的潜在风险。
3. 人机工效学分析人机工效学分析可以评估医疗器械的操作界面是否符合人体工程学原理,是否易于操作和理解。
人体工程学风险评估

1、姿势・负荷评价 CV-QCD改善部 2009年03月20日
1
人机工程—定义
何谓人机工程?
定义:也成为「人类工程学」,是在思考人类 的特性之后,设计出容易使用的商 品、制定出容易作业的作业条件的一种科学。
最高的高度
洗手台的高度
键盘的文字排列
2
人机工程评价—定义
何谓人机工程评价?
☆根据作业时的姿势和负荷的大小,对作业工程的肉 体上的负担进行评价。
姿势
良
恶
综合评价等级(3阶段)
1-3
良 负 荷 恶
4
+ -
5
+
a等级:对策优先度高 b等级:要有对策 c等级:没有问题
1-3 4
c
b
女 子 x 高 龄 者 x
b a
高龄者x
5
3
人机工程—评价目的
目的
对作业负担进行客观的评价
实现无论任何人都能够稳定的进行生产的作业环境
(高龄者、女子、外部要员也能够持续的工作的工程创建) (疾病的低減)
加力矩的操作力
※2是在身体的朝向和位置受到 10㎏f未满or10~ 15㎏f以上or10 2-2使力点离开身体超过 10~14.9㎏f11~ 限制的时候;(适用于带车轮 14.9㎏f10回/h以 ~14.9㎏f61回 60回/h以下 的台车的拉动方向不确定的时 30㎝ 下 /h以上 候 ※单班操作力的简单计算方法 检测力矩T(Mm),工具手柄的 10000㎏f以 长度L(m),单班检测数量 1、单班的总操作力 6000㎏f未满 6000~9999㎏f x(个数);班的总操作力=[T/ 上 (10*L)]*X ※检测力矩50Mm以上为对象
11
机器人风险评价

机器人风险评价一、引言随着人工智能和机器人技术的快速发展,机器人在各个领域的应用越来越广泛。
然而,机器人的智能化和自主性也带来了一定的风险。
为了确保机器人的安全性和可靠性,进行机器人风险评价是至关重要的。
二、背景机器人风险评价是通过对机器人系统进行全面、系统的分析和评估,识别和评估潜在的风险,并提出相应的控制措施和改进建议。
通过风险评价,可以确保机器人在运行过程中不会对人类和环境造成伤害或损害。
三、风险评价的步骤1. 确定评价的范围和目标:明确评价的范围,包括机器人的功能、应用场景、操作环境等,并确定评价的目标,例如评估机器人的安全性、可靠性、适用性等。
2. 识别潜在的风险:通过对机器人系统的分析和研究,识别可能存在的风险,包括机器人的设计缺陷、操作失误、技术故障等。
3. 评估风险的可能性和严重程度:对于识别出的风险,评估其发生的可能性和对人类和环境的严重程度。
可以使用概率分析、统计数据和专家意见等方法进行评估。
4. 制定控制措施和改进建议:根据评估结果,制定相应的控制措施和改进建议,以降低风险的可能性和严重程度。
例如,可以对机器人进行安全设计和控制系统的改进,提供培训和操作指南,建立紧急停机机制等。
5. 实施和监控措施:将制定的措施和建议实施到机器人系统中,并进行监控和评估效果。
定期检查和测试机器人系统,确保措施的有效性和可靠性。
四、风险评价的工具和方法1. 风险矩阵:通过将风险的可能性和严重程度进行矩阵化,快速识别出高风险区域,以便优先采取控制措施。
2. 事件树分析:通过对机器人系统的各种事件进行分析,确定事件发生的可能性和后果,以及相应的控制措施。
3. 故障树分析:通过对机器人系统的故障进行分析,确定故障发生的可能性和对系统的影响,以及相应的控制措施。
4. 可靠性工程:通过对机器人系统的可靠性进行评估和改进,提高系统的可靠性和稳定性。
五、风险评价的应用领域1. 工业机器人:评估工业机器人的安全性和可靠性,确保其在生产线上的运行不会对工人造成伤害。
医疗设备的人机工效学评估与设计

安全性与舒适性设计
安全防护
确保设备具有足够的安全防护措 施,降低操作者在使用过程中可
能受到的伤害风险。
人体工学
根据人体工学原理,合理设计设备 形状和结构,减少操作者在使用过 程中的疲劳和不适感。
环境控制
对于需要特定环境条件的设备,应 具备相应的环境控制功能,如温度 、湿度、洁净度等,以确保操作者 的舒适性和安全性。
重要性
医疗设备的人机工效学评估对于 提高医疗质量和安全性,降低医 疗事故风险,提升患者和医护人 员的体验具有重要意义。
评估的目标和原则
目标
确保医疗设备的设计符合人机工效学 的要求,提高设备的易用性、效率和 安全性。
原则
以用户为中心,注重人性化设计,强 调实用性、可靠性和舒适性。
评估的流程和方法
流程
03 医疗设备人机工效学评估 指标
使用效率
使用效率
评估医疗设备在使用过程中的效率和便利性,包括操作步骤的简化程度、设备响 应速度、信息显示清晰度等。
操作界面设计
评估医疗设备的操作界面是否符合人机工效学原则,如布局、按钮设计、图标标 识等是否易于理解和操作。
用户满意度
用户体验
关注用户在使用医疗设备过程中的感受和体验,包括舒适度 、易用性和可靠性等方面。
人机工效学评估通常包括需求分析、概念设计、原型评估、用户测试和改进等 阶段。
方法
可以采用观察法、问卷调查法、访谈法、任务分析法等多种方法进行评估,同 时结合人机工效学指标进行量化分析。
02 医疗设备人机工效学设计 原则
人机界面设计
01
02
03
界面布局
确保界面布局简洁明了, 易于理解,减少操作过程 中的混淆和错误。
机器人风险评价
机器人风险评价标题:机器人风险评价引言概述:随着科技的不断发展,机器人在各个领域的应用越来越广泛。
然而,机器人的运行过程中也存在着一定的风险。
为了确保机器人的安全性和可靠性,机器人风险评价成为必要的工作。
本文将从五个大点来阐述机器人风险评价的相关内容。
正文内容:1. 机器人的工作环境评价1.1 评估机器人所处的环境是否适合其工作。
考虑到机器人的大小、形状、分量等因素,评估其在特定环境下是否能够正常运行。
1.2 分析机器人工作环境中的潜在危(wei)险因素,如高温、高压等,评估机器人在这些环境下的安全性和可靠性。
2. 机器人的功能评价2.1 评估机器人的功能是否符合预期。
通过对机器人的各项功能进行测试和验证,确保其能够完成所需的任务。
2.2 分析机器人在不同工作条件下的性能表现,如速度、精度等,评估其在各种工作场景下的适应性。
3. 机器人的人机交互评价3.1 评估机器人与人类的交互方式是否合理。
考虑到人类的行为习惯和认知能力,评估机器人的交互界面设计是否易于操作和理解。
3.2 分析机器人与人类交互过程中的潜在风险,如误操作、误判等,评估机器人与人类的安全性和互动性。
4. 机器人的自主性评价4.1 评估机器人的自主决策能力。
通过对机器人的算法和逻辑进行评估,确保其能够在不同情况下做出正确的决策。
4.2 分析机器人自主行为可能带来的潜在风险,如误判、误动作等,评估机器人的安全性和灵便性。
5. 机器人的应急响应评价5.1 评估机器人在紧急情况下的应急响应能力。
考虑到机器人可能遭遇的突发情况,评估其在应急情况下的反应速度和处理能力。
5.2 分析机器人应急响应过程中的潜在风险,如误操作、误判等,评估机器人的安全性和可靠性。
总结:综上所述,机器人风险评价是确保机器人安全可靠运行的重要工作。
通过对机器人的工作环境、功能、人机交互、自主性和应急响应等方面进行评估,可以有效地识别和减少机器人运行过程中的潜在风险。
在机器人应用的过程中,风险评价是必不可少的环节,能够保障机器人的安全性和可靠性。
B12人机工程风险评估控制程序

人机工程学重视以人为本,一切为人服务;为人的效能、健康问题提供理论与科学的方法;强调工作时在以人健康为主体的前提下考虑其他因素。
8、人机工程应用要求
公司各级领导均应认真学习和掌握人机工程学知识,将理论与实践相结合,积极发现和改进工作环境和工作条件,使之更加符合员工的健康需求,同时挖掘更高的工作效能。
3.3各部门负责本规定的贯彻实施。
4、人机工程简介
4.1 定义:按照国际工效学会所下的定义,人机工程学是一门“研究人在某种工作环境中的解剖学、生理学和心理学等方面的各种因素;研究人和机器及环境的相互作用;研究人在工作中、家庭生活中和休假时怎样统一考虑工作效率、人的健康、安全和舒适等问题的科学”。
4.2研究内容:早期的人机工程学主要研究人和工程机械的关系,即人机关系。其内容有人体结构尺寸和功能尺寸,操作装置,控制盘的视觉显示,这就涉及到了心理学,人体解剖学和人体测量学等,继而研究人和环境的相互作用,即人-环境关系,这又涉及到了心理学,环境心理学等。至今,人体工程学的研究内容仍在发展,并不统一。
6.2 人机工程相关因素的控制:
6.2.1 对评价出的重要人机工程相关因素,即高风险因素,体系部主管应会同相关部门负责人制定改善及保障措施,以确保该因素对工作效率及人体健康的有益性。
6.2.2 各部门在日常检查、监测与测量中,一旦发现人机工程不利因素,应及时填写《人机工程风险评估及治理记录表》,经体系部主管确认后,采取相应的措施进行改善。
1、目的:本规定的制定旨在通过在工作场所中积极、合理地应用人体工程学的科学理论,不断改善工作环境,使其适合员工的身心活动要求,取得最佳的使用效能,实现安全、健康、高效能和舒适的目标。
2、适用范围:公司所有部门,全体员工。
第九节 人机工程学专项风险评估

检查要求
13. 人工移动材料时,消除或尽量减少坡道。 14. 采用推拉方式将材料水平放入或取出,不要垂直提高或放
低。 15. 在搬运材料时,排除那些需要弯腰或扭转身体的任务。 16. 拿起材料时需将其靠近身体。 17. 在身体前方慢慢将材料提高或放低,不要扭转或深弯腰。 18. 在负重行走较长距离时,要将物体在肩膀上放平,保持平
需要身体活动和体力消耗大的工人提供站立的工作场所。 63. 员工进行靠近身体或在身体前的工作时,确保员工能自然
平衡地站立,并能由双脚承载体重。 64. 尽可能使工人在工作中能坐立自如。 65. 为站立工作的工人提供椅子或凳子让他们能不时坐坐。 66. 为坐的工作者提供好的、有靠背、可调整的椅子。 67. 为在大小物体之间工作的员工提供可调整的作业面。 68. 使用有键盘和显示器的、员工能调整的工作站,例如视频
福利设施 95. 提供并保持良好的更换、清洗和卫生设施以确保良好的卫
生及整洁。 96. 提供良好的饮水设备、进食区及休息室以确保良好的表现
和安宁。 97. 提高员工的福利服务水平、改善福利设施。 98. 为员工提供会议室和培训课室。 99. 清楚标明需要使用个人防护用品的区域。 100. 提供充分的个人防护用品。 101. 当不能用其它方法消除风险时,选择合适并容易保养的个
检查结果
检查要求
45. 在显示器上用标记或颜色使工人明白他们要干什么。 46. 清除或盖住所有未用的显示器。 47. 使用人们能容易明白的标志。 48. 使标签和标记容易看见、读取和理解。 49. 使用工人能容易并正确地理解的警告标志。 50. 用夹具和固定设备使机器操作稳定、安全及高效。 51. 购买安全的机器。 52. 使用喂料和给料装置时手要远离机器的危险部位。 53. 使用适当的保护装置和屏障以防止与机器运动部位直接
人机工程评估
人机工程评估课程目录原理概述风险伤害预测风险识别/鉴定风险评估(定性、定量)人体工程学原理概述原理概述各国学科命名:欧洲Ergonomics(工效学),目前普遍采用;美国Human Engineering(人类工程学)Human Factors Engineering(人因工程); 日本人间工学;中国人类工效学、人因工程。
心理学家Engineering Psychology(工程心理学);英国1950年成立英国人机学研究会,1957年创办会刊《Ergonomics》。
美国1957年成立人因工程学会,发行会刊《Human Factors》。
日本于1963年成立日本人间工学研究会。
1960年成立国际人机学协会。
(International Ergonomics Association,IEA)中国进入80年代以后,开始人因工程的研究。
发现人的能力和限制保持一个自然的姿势人体工程学应用实例?1、2、3、4、YES orNO ?YES or NO?YES or NO?人体工程学风险伤害预测伤害预测肌肉骨骼韧带肌腱神经软骨动脉静脉血管常见的累积性创伤失调背部受伤肌腱炎腱鞘炎(扳机指)外上髁(ke)炎胸部综合症腕管综合症腕骨隧道筋血管中部神经手掌侧手腕的横截面腕骨头手指屈肌腱横向腕骨韧带粘液囊炎、滑囊炎橙色代表手的麻木感无名指和小指手麻-尺神经麻木手腕突然抬不起来-桡神经麻木拇指和中指手麻-正中神经麻木手部神经麻木振动性白指vibration induced white finger,VWF鼠标手足痛风和韧带拉伤胸廓出口综合征腿部神经麻木脊柱(背部)受伤腰部劳损压缩性骨折的椎骨肌肉痉挛脊柱侧弯不稳定的椎骨脊柱后凸腰椎前屈曲颈椎综合症椎间盘压力和姿势的关系上交叉综合征:圆肩、驼背、肩胛骨耸起、头部前倾颈椎综合征长期站立的健康影响下背部疼痛脚疼或其他脚部疾病足底筋膜炎和足跟刺足部骨改变(如平足)受限的血液流动脚部和腿部的肿胀静脉曲张增加膝盖和臀部关节炎的机会 早产和自然流产长时间坐着的健康影响深静脉血栓的形成增加血液压力静脉曲张过早死亡代谢综合征肥胖慢性病,如血液病、癌症、糖尿病 下背部失调颈部、手臂和腿部疼痛站vs坐增加血液循环更好的血液糖分控制 更低的血液压力由于活动增加新陈代谢 释放能量来改善焦点肌肉骨骼类疾病慢性-重复的动作、过度劳累、累积性疾病急性-拉伤(韧带损伤)、扭伤(肌腱和肌肉伤)在美国,每年因人体工程学引发的伤害达到了工伤索赔案例数的60%伤害损失赔偿额的80%良好人机工程应用,改善了员工的福利,改善了业务绩效。
人机工程风险评估

每工作2小时中间需体息10分钟,注意戴防粉尘 口罩
生产部/管理部
需要蹲下来又要站立工作,体力消耗较大,因此 每工作1小时需要休息10分钟进行缓解,并且每 生产部/管理部 2小时需要补充水分
审批:
1 验布 0.5
2.55
1.275
7
8
0.88
11.55
轻体力 劳动
Ⅰ
轻体力劳动每工作4小时需体息一次
生产部/管理部
2 尾查 0.5
2.53
1.265
7
8
0.88
11.48
轻体力 劳动
Ⅰ
3 裁剪 1.5
2.5
4 缝制
1
5 压胶
1
2.44 2.44
6 转运
2
2.53
7
整理工 序
1
8 装卸
2
评估 时 间:
轻体力劳动每工作4小时需体息一次
生产部/管理部
每工作2小时中间需体息10分钟,中途可以选择 并且需要补充水分.因粉尘浓度较大需戴上防 生产部/管理部 护口罩
每工作2小时中间需体息10分钟,长时间坐下, 需要走动
生产部/管理部
每工作2小时中间需体息10分钟,长时间坐下, 需要走动
生产部/管理部
需要蹲下来又要站立工作,体力消耗较大,因此 每工作1小时需要休息10分钟进行缓解,并且每 生产部/管理部 2小时需要补充水分,作业时需戴上防护手套.
人机工程风险评估及采取措施
工作业岗位体力劳动强度评估
序号
工种
8H工作日能量代谢率(M)
劳动时间率(T)
评估结果
相对代 谢率RMB
基本代谢 率kj/m²
*min
能量代谢率M
人工智能在风险评估中的可行性分析报告
人工智能在风险评估中的可行性分析报告近年来,随着人工智能技术的快速发展,其在各领域的应用也逐渐扩展和深化。
其中,人工智能在风险评估中的应用备受关注。
本文将对人工智能在风险评估中的可行性进行分析,并探讨其优势和挑战。
1. 人工智能技术在风险评估中的优势首先,人工智能技术具有高效性和准确性的优势。
通过大数据分析和机器学习算法,人工智能能够迅速识别和分析海量数据,提高风险评估的效率和准确度。
在金融领域,人工智能可以帮助银行和投资机构更快速地评估和管理风险,降低不良资产率和损失。
其次,人工智能技术具有智能化和自学习的特点。
通过不断学习和优化算法模型,人工智能系统可以适应不同风险情况和环境变化,提高决策的灵活性和准确性。
在保险行业,人工智能可以帮助保险公司更好地理解客户需求,定制个性化的保险产品,提升服务质量和客户满意度。
2. 人工智能技术在风险评估中面临的挑战然而,人工智能技术在风险评估中也存在一些挑战。
首先,数据安全和隐私保护是人工智能应用面临的重要问题。
在风险评估过程中,大量敏感数据的处理和存储可能导致信息泄露和隐私侵犯,需要加强数据保护和安全管理。
其次,人工智能决策的透明度和可解释性也是风险评估中的关键问题。
由于深度学习算法的黑盒特性,人工智能系统的决策过程常常难以解释和理解,可能导致误判和不公平现象。
因此,如何提高人工智能决策的可解释性,增强用户信任,是当前亟待解决的难题。
3. 人工智能在风险评估中的应用前景尽管人工智能在风险评估中面临一些挑战,但其应用前景依然广阔。
随着技术的不断进步和政策法规的支持,人工智能将在风险评估领域发挥越来越重要的作用。
未来,我们可以预见,人工智能将更好地帮助企业和机构识别和规避风险,实现智能化风险管理和决策优化。
综上所述,人工智能在风险评估中的可行性已经逐渐得到验证,但仍需解决一些技术和伦理问题。
随着不断创新和改进,相信人工智能技术将为风险评估带来更多机遇和挑战,促进风险管理水平的不断提高。
机器人风险评价
机器人风险评价一、引言机器人在现代社会中扮演着越来越重要的角色。
为了确保机器人的安全性和可靠性,进行机器人风险评价是必不可少的。
本文将详细介绍机器人风险评价的标准格式,包括评价目的、评价方法、评价指标等内容。
二、评价目的机器人风险评价的目的是识别和评估机器人可能引起的风险,以便采取相应的措施来降低风险发生的概率和严重程度。
评价的结果可以匡助制定机器人的安全设计和操作规范,保护人类和环境的安全。
三、评价方法1. 文献研究:通过采集和分析相关的文献资料,了解机器人的基本原理、功能和应用领域,以及已有的风险评价研究成果。
2. 实地考察:对机器人的实际使用环境进行考察,包括工作场所、人员密集度、操作方式等,以了解机器人与人类和环境的交互情况。
3. 专家访谈:与机器人领域的专家进行访谈,获取他们的经验和意见,以及对机器人风险评价的建议。
4. 实验测试:通过对机器人进行实验测试,评估其在不同工作场景下的安全性和可靠性。
四、评价指标1. 机器人操作风险评估:评估机器人在操作过程中可能引起的风险,包括碰撞、夹伤、电击等。
2. 机器人安全设计评估:评估机器人的安全设计是否符合相关标准和规范,包括机械结构、电气系统、软件控制等方面。
3. 机器人人机交互评估:评估机器人与人类的交互过程中可能存在的风险,包括误操作、误识别等。
4. 机器人环境适应评估:评估机器人在不同工作环境下的适应性和安全性,包括温度、湿度、气压等环境因素的影响。
5. 机器人应急响应评估:评估机器人在紧急情况下的应急响应能力,包括住手机器人运动、报警、求救等功能的有效性。
五、评价结果分析根据评价指标的评估结果,对机器人的风险进行定性和定量分析。
通过比较评估结果与相关标准和规范的要求,确定机器人的风险等级,并提出相应的改进措施和建议。
六、评价报告编写根据评价结果,编写机器人风险评价报告。
报告应包括评价目的、评价方法、评价指标、评价结果分析等内容,以及改进措施和建议。
人机工效学风险评估

部门: 总结人: 日期:
序号
工作任务
工作任务发生的区 做该工作的 域 员工人数
人机工效学风险因素 (例如:笨拙的姿势、用力、静态的 用力、反复性、振动、软组织压迫、暴露于冷温度、不良操 作姿势、个人健康和遗传
备注
12Βιβλιοθήκη 32 Of 3部门: 总结人: 日期:
序号
工作任务
工作任务发生的区 做该工作的 域 员工人数
备注
6
7 8 9
人机工效学风险因素 (例如:笨拙的姿势、用力、静态的 用力、反复性、振动、软组织压迫、暴露于冷温度、不良操 作姿势、个人健康和遗传
备注
3
4
5
6
3 Of 3
部门: 总结人: 日期:
序号
工作任务
工作任务发生的区 做该工作的 域 员工人数
人机工效学风险因素 (例如:笨拙的姿势、用力、静态的 用力、反复性、振动、软组织压迫、暴露于冷温度、不良操 作姿势、个人健康和遗传
RBA0人机工程风险评价管理程序

人机工程风险评估管理程序版本:A 0版适用部门:公司所有部门文件编号:COP-018生效日期:满足客户需求,服务社会1.目的对本公司人机工程学评估、工作姿势、工作设备、工具、工作环境、工作过程及人工搬运等内容进行评估,特制本程序。
2.范围适用于本公司人机工程学的要求和内容3.术语和定义3.1人机工程学人机工程学是一门技术科学。
它在系统科学理论的指导下,运用人机工程学的原理和方法,研究人、机器、环境之间相互关系的规律,评价人-机-环境系统的总体性能的安全,从而解决职工的健康和安全问题。
人机工程学通过技术和人的协调关系,把使用者作为工作设备、工作环境和工作过程等设计的出发点,围绕人的生理、心理特点来设计,最终目的是设计合适的机械,创造最舒适的劳动条件,改善作业环境,提高生产效率,减少作业中的差错,最大限度地避免事故的发生,让使用者更健康、高效、愉快地工作和生活。
3.2工作环境在工作空间中,人周围的物理、化学、生物学、社会和文化的因素。
3.3工作设备在工作系统中,所使用的工具、机器、运载工具、器件、设施、装置和其他要素。
3.4工作过程在工作系统中,人、工作设备、材料、能量和信息在时间和空间上相互作用的顺序。
4.职责和权限4.1生产部门4.1.1生产部对人机工程学进行调查,做出公司年度人机工程学风险概述。
4.1.2生产部根据公司年度人机工程学风险概述需改进项目,跟踪各部门整改的完成情况。
4.2人事行政部门4.2.1 各区域代表在月度安健环检查内容中应包括对管辖区域的人机工程学的调查。
4.2.2对员工受伤或疾病的安健环事故(件)记录的原因分析应包括人机工程学内容。
4.2.3要本着“以人为本”的原则,对不符合人机工程学的不符合项进行整A020200505。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
部门: 总结人: 日期:
序号
工作任务
工作任务发生的区 做该工作的 域 员工人数
人机工效学风险因素 (例如:笨拙的姿势、用力、静态的 用力、反复性、振动、软组织压迫、暴露于冷温度、不良操 作姿势、个人健康和遗传
备注Leabharlann 1232 Of 3
部门: 总结人: 日期:
序号
工作任务
工作任务发生的区 做该工作的 域 员工人数
人机工效学风险因素 (例如:笨拙的姿势、用力、静态的 用力、反复性、振动、软组织压迫、暴露于冷温度、不良操 作姿势、个人健康和遗传
备注
3
4
5
6
3 Of 3
部门: 总结人: 日期:
序号
工作任务
工作任务发生的区 做该工作的 域 员工人数
人机工效学风险因素 (例如:笨拙的姿势、用力、静态的 用力、反复性、振动、软组织压迫、暴露于冷温度、不良操 作姿势、个人健康和遗传
备注
6
7 8 9