第五章多体问题和近似方法
近似方法.

(13)式右端各项通常称为 En 的零级近似,一级修正
和二级修正:
En(1) Hnn ,
En(2)
kn
| Hnk |2 En(0) - Ek(0)
(13' )
(14)式中 项称为 n 的一级修正 k
(1) n
kn
H kn
E (0) n
-
E (0) k
(0) k
(14 ' )
-
E ) (0) (1)
n
n
-(Hˆ (1)
-
E ) (1) (0)
n
n
一级近似能级
用
(0) n
*左乘上面等式两边再积分
(0) n
* (Hˆ (0)
-
E
(0) n
)2
[
n 2
1
n1 2
1
-
]
-(
e
)2
1
2
2
- e2 2 2 2
由此式可知,能级移动与 n 无关,即与扰动前振子
(1) n
kn
的状态无关。
H k n En(0) - Ek(0)
(0) k
kn
-
e
[
] n
2 k,n-1
(0 n
)
kn
H kn
E (0) n
-
E
(0 k
)
(0) k
(14)
§5.2 简并微扰理论
(一)简并微扰理论 (二)讨论
一、 非简并情况下的幂级数解法
近似计算与误差分析

物理问题中的近似计算
量子力学
在处理复杂的多体问题时,常采用近似方法,如变分法、微扰法 等,以得到可解析或数值求解的近似解。
电磁学
在电磁场计算中,对于复杂形状和边界条件的问题,常采用近似 解法,如有限元法、边界元法等。
统计物理
在处理大量粒子组成的系统时,常采用近似方法描述系统的宏观 性质和行为,如平均场理论、涨落理论等。
近似计算的缺点
精度损失
近似计算会引入误差,这可能导致结果不准确或误导 。
误差累积
在连续进行多次近似计算时,误差可能会累积并放大 ,导致最终结果严重偏离真实值。
适用性限制
某些问题可能不适合使用近似方法解决,因为它们需 要非常高的精度或特定的数学特性。
改进方向及展望
算法优化
误差控制
开发更高效的近似算法,以在保持计算速 度的同时提高精度。
近似计算的方法与技巧
Chapter
等价变换法
等价无穷小替换
在极限计算中,通过等价无穷小替换简化计算过 程。
泰勒级数展开
将复杂函数用泰勒级数展开,取有限项进行近似 计算。
洛必达法则
在求解不定式极限时,通过洛必达法则转化为求 导运算。
微元法
微分近似
利用微分表示函数在某点的局部变化率,进行 近似计算。
在函数运算中,自变量$x$的误差$Delta x$会导致因变量$y$产生误差$Delta y$。误差传递公式描 述了这种关系,即$Delta y = f'(x) Delta x$。
误差合成
当多个近似值参与运算时,它们各自的误差会合成一个总误差。误差合成公式为$Delta z = sqrt{(Delta x)^2 + (Delta y)^2}$,其中$Delta x$和$Delta y$分别为参与运算的两个近似值的误差 。
多智能体系统中的几个问题
为了提高多智能体系统的性能,需要对通信延迟和数据同步进行优化,例如采用缓存技术 减少通信次数,或者采用分布式数据库来提高数据同步的效率。
03
决策与规划问题
决策理论
决策理论概述
决策理论是研究在不确定和风险 的环境下,理性决策者如何做出 最优选择的学科。
预期效用理论
预期效用理论是决策理论中的一 种,它基于概率和效用函数的乘 积来评估可能的行动结果。
04
知识表示与学习问题
知识表示方法
陈述性知识
指关于事实和事物的具体信息,可以通过语言、文字、符号等方式进行表达和传播。在多智能体系统中,陈述性知识 用于描述智能体的状态、行为和环境等。
程序性知识
指关于如何执行某项任务或解决某个问题的知识,通常以算法、规则等形式存在。在多智能体系统中,程序性知识用 于指导智能体进行决策和行动。
VS
强化学习的核心是建立奖励机制,通 过奖励和惩罚来引导智能体的行为。 在多智能体系统中,奖励机制的设计 需要考虑到个体和整体目标的平衡。
深度学习在多智能体系统中的应用
深度学习是一种机器学习技术,通过构建多层神经网络来模 拟人类的感知和认知过程。在多智能体系统中,深度学习用 于提高智能体的感知和理解能力,进而提升其决策和协作能 力。
。
分布式控制理论在多智能体系 统中的应用包括一致性控制、
协同控制和编队控制等。
优化算法
01
优化算法是解决多智能体系统中的问题的重要工具,主要目的 是找到最优解或近似最优解。
02
常见的优化算法包括梯度下降法、牛顿法、遗传算法等。
在多智能体系统中,优化算法的应用包括任务分配、路径规划
03
、资源分配等。
哈特利福克近似变分法推导
哈特利福克近似变分法推导
哈特利福克近似变分法(Hartree-Fock approximation)是用于求解
多体量子系统的一种近似方法。
下面是推导哈特利福克近似变分法的
基本步骤:
1. 定义系统的状态:考虑一个多体量子系统,其中包含N个玻色子或
费米子。
系统的总哈密顿算符可以写为H = T + V,其中T是粒子的动能算符,V是粒子间的相互作用势能。
2. 引入变分波函数:假设系统的基态波函数可以用一组多体波函数的
线性组合表示,即|Φ⟩= ∑C_i |ϕ_i⟩,其中|ϕ_i⟩是一组正交
归一的单粒子波函数,C_i是待定的系数。
3. 计算期望值:将变分波函数代入总哈密顿算符,计算系统的能量期
望值E = ⟩Φ|H|Φ⟩。
根据变分原理,通过选择合适的系数C_i,可
以使得能量期望值达到最小值。
4. 计算波函数变化:对于费米子系统,使用斯莱特-戈登方程
(Slater-Gordon equation)来求解单粒子波函数。
对于玻色子系统,可以使用哈特利方程(Hartree equation)来求解。
5. 迭代求解:根据变分波函数的系数C_i,计算出新的能量期望值E,并更新波函数的系数,重复步骤4和步骤5,直到能量期望值收敛。
通过以上步骤,可以得到系统的基态能量和基态波函数的近似解。
哈
特利福克近似变分法是量子化学中常用的一种方法,能够很好地描述
原子、分子等多体系统的性质。
多体问题中的摩擦力与基本方程求解
多体问题中的摩擦力与基本方程求解多体问题是物理学中重要的研究对象之一,研究多个物体之间的相互作用与运动规律。
在研究多体问题时,摩擦力是一个不可忽略的因素。
本文将从多体问题中的摩擦力入手,探讨其对基本方程求解的影响。
首先,我们对多体问题中的摩擦力进行简要介绍。
摩擦力是由物体表面接触处相对滑动产生的一种阻碍运动的力。
在多体问题中,摩擦力的存在会导致物体之间的相对运动发生改变,进而影响到整个系统的动力学行为。
摩擦力的大小与物体表面的粗糙程度、接触面积以及所受力的大小等因素相关。
常见的摩擦力模型有Coulomb摩擦模型和Viscous摩擦模型。
Coulomb摩擦模型认为摩擦力与物体之间的压力成正比,且存在摩擦系数。
Viscous摩擦模型则假设摩擦力与速度成正比,与Coulomb摩擦模型相比,Viscous摩擦模型更适用于速度较高的情况。
在多体问题的求解中,摩擦力的考虑是必不可少的。
通过考虑摩擦力,我们可以更准确地描述物体之间的相互作用,得到更真实的系统运动规律。
然而,由于摩擦力的非线性和复杂性,基本方程的求解变得更加困难。
在求解多体问题时,通常会采用数值方法。
最常用的数值方法之一是Euler法。
该方法基于牛顿第二定律,通过离散化时间和空间,将连续的物理过程分解为一系列离散的时间步骤,从而得到物体的数值解。
然而,当考虑到摩擦力时,Euler法的精度会受到较大影响。
为了解决摩擦力对基本方程求解的影响,可以采用更高阶的数值方法。
一种常用的方法是改进的Euler法,即改进的欧拉-克罗贝克法(Euler-Cromer method)。
在该方法中,先根据物体当前的速度和加速度,计算下一个时刻的速度,再基于新的速度计算下一个时刻的位置。
通过这种方式,可以更准确地模拟物体的运动轨迹。
除了数值方法,还可以采用20世纪末提出的更高级的算法,如Runge-Kutta法。
利用多个阶段的计算,该方法可以更准确地估计物体的运动状态,从而得到更精确的解。
M高中奥林匹克物理竞赛解题方法十四:近似法
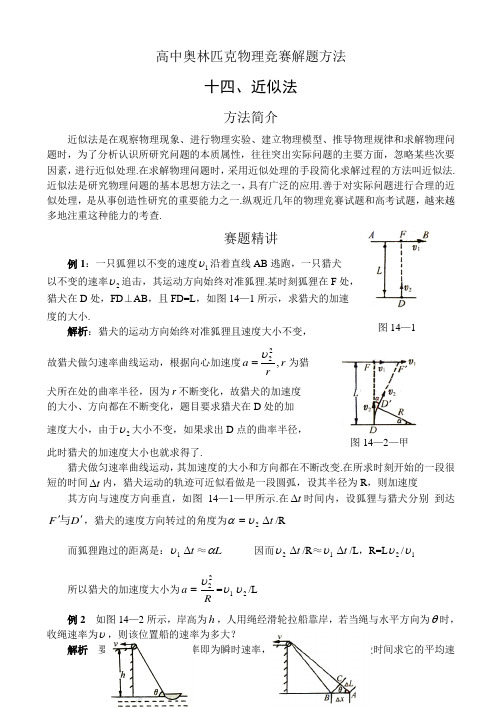
高中奥林匹克物理竞赛解题方法十四、近似法方法简介近似法是在观察物理现象、进行物理实验、建立物理模型、推导物理规律和求解物理问题时,为了分析认识所研究问题的本质属性,往往突出实际问题的主要方面,忽略某些次要因素,进行近似处理.在求解物理问题时,采用近似处理的手段简化求解过程的方法叫近似法.近似法是研究物理问题的基本思想方法之一,具有广泛的应用.善于对实际问题进行合理的近似处理,是从事创造性研究的重要能力之一.纵观近几年的物理竞赛试题和高考试题,越来越多地注重这种能力的考查.赛题精讲例1:一只狐狸以不变的速度1υ沿着直线AB 逃跑,一只猎犬以不变的速率2υ追击,其运动方向始终对准狐狸.某时刻狐狸在F 处,猎犬在D 处,FD ⊥AB ,且FD=L ,如图14—1所示,求猎犬的加速度的大小.解析:猎犬的运动方向始终对准狐狸且速度大小不变, 故猎犬做匀速率曲线运动,根据向心加速度r r a ,22υ=为猎犬所在处的曲率半径,因为r 不断变化,故猎犬的加速度的大小、方向都在不断变化,题目要求猎犬在D 处的加速度大小,由于2υ大小不变,如果求出D 点的曲率半径,此时猎犬的加速度大小也就求得了.猎犬做匀速率曲线运动,其加速度的大小和方向都在不断改变.在所求时刻开始的一段很短的时间t ∆内,猎犬运动的轨迹可近似看做是一段圆弧,设其半径为R ,则加速度其方向与速度方向垂直,如图14—1—甲所示.在t ∆时间内,设狐狸与猎犬分别 到达D F ''与,猎犬的速度方向转过的角度为=α2υt ∆/R而狐狸跑过的距离是:1υt ∆≈L α 因而2υt ∆/R ≈1υt ∆/L ,R=L 2υ/1υ 所以猎犬的加速度大小为=a R 22υ=1υ2υ/L例2 如图14—2所示,岸高为h ,人用绳经滑轮拉船靠岸,若当绳与水平方向为θ时,收绳速率为υ,则该位置船的速率为多大?解析 要求船在该位置的速率即为瞬时速率,需从该时刻起取一小段时间求它的平均速图14—1图14—2—甲率,当这一小段时间趋于零时,该平均速率就为所求速率.设船在θ角位置经t ∆时间向左行驶x ∆距离,滑轮右侧的绳长缩短L ∆,如图14—2—甲所示,当绳与水平方向的角度变化很小时,△ABC 可近似看做是一直角三角形,因而有 L ∆=θcos x ∆两边同除以t ∆得:θcos t x t L ∆∆=∆∆,即收绳速率θυυcos 船= 因此船的速率为θυυcos =船例3 如图14—3所示,半径为R ,质量为m 的圆形绳圈,以角速率ω绕中心轴O 在光滑水平面上匀速转动时,绳中的张力为多大?解析 取绳上一小段来研究,当此段弧长对应的圆心角θ∆很小时,有近似关系式.sin θθ∆≈∆ 若取绳圈上很短的一小段绳AB=L ∆为研究对象,设这段绳所对应的圆心角为θ∆,这段绳两端所受的张力分别为A T 和B T (方向见图14—3—甲),因为绳圈匀速转动,无切向加速度,所以A T 和B T 的大小相等,均等于T . A T 和B T 在半径方向上的合力提供这一段绳做匀速圆周运动的向心力,设这段绳子的质量为m ∆,根据牛顿第二定律有:R m T 22sin 2ωθ∆=∆;因为L ∆段很短,它所对应的圆心角θ∆很小所以22sin θθ∆=∆ 将此近似关系和πθπθ22∆=⋅∆⋅=∆m R m R m 代入上式得绳中的张力为πω22R m T = 例4 在某铅垂面上有一固定的光滑直角三角形细管轨道ABC ,光滑小球从顶点A 处沿斜边轨道自静止出发自由地滑到端点C 处所需时间,恰好等于小球从顶点A 处自静止出发自由地经两直角边轨道滑到端点C 处所需的时间.这里假设铅垂轨道AB 与水平轨道BC 的交接处B 有极小的圆弧,可确保小球无碰撞的拐弯,且拐弯时间可忽略不计.在此直角三角形范围内可构建一系列如图14—4中虚线所示的光滑轨道,每一轨道是由若干铅垂线轨道与水平轨道交接而成,交接处都有极小圆弧(作用同上),轨道均从A 点出发到C 点终止,且不越出该直角三角形的边界,试求小球在各条轨道中,由静止出发自由地从A 点滑行到C 点所经时间的上限与下限之比值.解析 直角三角形AB 、BC 、CA 三边的长分别记为1l 、2l 、3l ,如图14—4—甲所示,小球从A 到B 的时间图14—3 图—14—3—甲记为1T ,再从B 到C 的时间为2T ,而从A 直接沿斜边到C所经历的时间记为3T ,由题意知321T T T =+,可得1l :2l :3l =3:4:5,由此能得1T 与2T 的关系. 因为21121121T gT l gT l ==所以21212T T l l =因为1l :2l =3:4,所以 1232T T = 小球在图14—4—乙中每一虚线所示的轨道中,经各垂直线段所需时间之和为11T t =,经各水平段所需时间之和记为2t ,则从A 到C 所经时间总和为21t T t +=,最短的2t 对应t 的下限min t ,最长的2t 对应t 的上限.m ax t小球在各水平段内的运动分别为匀速运动,同一水平段路程放在低处运动速度大,所需时间短,因此,所有水平段均处在最低位置(即与BC 重合)时2t 最短,其值即为2T ,故min t =.35121T T T =+ 2t 的上限显然对应各水平段处在各自可达到的最高位置,实现它的方案是垂直段每下降小量1l ∆,便接一段水平小量2l ∆,这两个小量之间恒有αcot 12l l ∆=∆,角α即为∠ACB ,水平段到达斜边边界后,再下降一小量并接一相应的水平量,如此继续下去,构成如图所示的微齿形轨道,由于1l ∆、2l ∆均为小量,小球在其中的运动可处理为匀速率运动,分别所经的时间小量)(1i t ∆与)(2i t ∆之间有如下关联:于是作为)(2i t ∆之和的2t 上限与作为)(1i t ∆之和的1T 之比也为.cot α故2t 的上限必为1T αcot ,即得:.37cot 111max T T T t =+=α 这样:max t min t =7:5例5 在光滑的水平面上有两个质量可忽略的相同弹簧,它们的一对端点共同连接着一个光滑的小物体,另外一对端点A 、B 固定在水平面上,并恰使两弹簧均处于自由长度状态且在同一直线上,如图14—5所示.如果小物体在此平面上沿着垂直于A 、B 连线的方向稍稍偏离初始位置,试分析判断它是否将做简谐运动?解析 因为一个物体是否做简谐运动就是要看它所受的回复力是否是一个线性力,即回复力的大小与位移大小成正经,方向相反.因此分析判断该题中的小物体是否做简谐运动,关键是求出所受的回复力的表达式(即此题中所受合外力的表达式).以AB 中点为原点,过中点且垂直于AB 的直线为x 轴,如图14—5—甲所示,取x 轴正方向为正方向,小物体所受回复力为:θsin )(20l l k F x --= ①其中k 为弹簧的劲度系数,0l 为弹簧的自由长度,l 为弹簧伸长后的长度,θ为弹簧伸长后与AB 直线的夹角.由几何知识可得l x =θsin ② 220x l l += ③将②、③代入①式得:由此可见,小物体受的合外力是一个非线性回复力,因此小物体将不做简谐运动.同时本题表明,平衡位置附近的小振动未必都是简谐运动.例6 三根长度均为m 2,质量均匀的直杆,构成一正三角形框架ABC ,C 点悬挂在一光滑水平转轴上,整个框架可绕转轴转动.杆AB 是一导轨,一电动玩具松鼠可在导轨上运动,如图14—6所示,现观察到松鼠正在导轨上运动,而框架却静止不动,试论证松鼠的运动是一种什么样的运动.解析 松鼠在AB 轨道运动,当框架不动时,松鼠受到轨道给它的水平力F ′作用,框架也受到松鼠给它的水平力F 作用,设在某一时刻,松鼠离杆AB 的中点O 的距离为x ,如图14—6所示,松鼠在竖直方向对导轨的作用力等于松鼠受到的重力mg ,m 为松鼠的质量.以C 点为轴,要使框架平衡,必须满足 条件FL FL mgx 2360sin =︒=,松鼠对AB 杆的水平力为 )3/(2L mgx F =,式中L 为杆的长度.所以对松鼠而言,在其运动过程中,沿竖直方向受到的合力为零,在水平方向受到杆AB 的作用力为F ′,由牛顿第三定律可知F ′=F ,即kx L mgx F =-=')3/(2其中L m k 32-= 即松鼠在水平方向受到的作用力F ′作用下的运动应是以O 点为平衡位置的简谐运动,其振动的周期为.64.22/322s g L k m T ===ππ当松鼠运动到杆AB 的两端时,它应反向运动,按简谐运动规律,速度必须为零,所以松鼠做简谐运动的振幅小于或等于L/2=1m.由以上论证可知,当框架保持静止时,松鼠在导轨AB 上的运动是以AB 的中点O 为平衡位置,振幅不大于1m 、周期为2.64s 的简谐运动.例7 在一个横截面面积为S 的密闭容器中,有一个质量为m 的活塞把容器中的气体分成两部分.活塞可在容器中无摩擦地滑动,活塞两边气体的温度相同,压强都是p ,体积分别是V 1和V 2,如图14—7所示.现用某种方法使活塞稍微偏离平衡位置,然后放开,活塞将在两边气体压力的作用下来回运动.容器保持静止,整个系统可看做是恒温的.(1)求活塞运动的周期,将结果用p 、V 1、V 2、m 和S 表示;(2)求气体温度0=t ℃时的周期τ与气体温度τ'=30℃时的周期τ'之比值.解析 (1)活塞处于平衡时的位置O 为坐标原点.0=x 当活塞运动到右边距O 点x 处时,左边气体的体积由V 1变为V 1+Sx ,右边气体的体积由V 2变为V 2Sx -,设此时两边气体的压强分别为1p 和2p ,因系统的温度恒定不变,根据玻意耳定律有:而以上两式解出:)1(2,)1(22221111V Sx V pV p V Sx V pV p +=+= ① 按题意,活塞只稍许离开平衡位置,故上式可近似为:),1(11x V S p p -≈ )1(22x V S p p +≈,于是活塞受的合力为.)11()(21221x V V pS S p p +-=-所以活塞的运动方程是x V V V V pS x V V pS ma 21212212)11(+-=+-= 其中a 是加速度,由此说明活塞做简谐运动,周期为)(221221V V pS V mV +=πτ (2)设温度为t 时,周期为τ,温度为t '时,周期为τ'.由于T p T p ''=,得出 所以T T '='ττ,将数值代入得95.0:='ττ 例8 如图14—8所示,在边长为a 的正三角形三个顶点A 、B 、C 处分别固定电量为Q 的正点电荷,在其中三条中线的交点O 上放置一个质量为m ,电量为q 的带正电质点,O 点显然为带电质点的平衡位置,设该质点沿某一中线稍稍偏离平衡位置,试证明它将做简谐运动,并求其振动周期.解析 要想证明带电质点是否做简谐运动,则需证明该带电质点沿某一中线稍稍偏离平衡位置时,所受的回复力是否与它的位移大小成正比,方向相反.因此该题的关键是求出它所受回复力的表达式,在此题也就是合外力的表达式.以O 为坐标原点,以AOD 中线为坐标x 轴,如图14—8—甲所示,设带电质点在该轴上偏移x ,A 处Q 对其作用力为1F ,B 、C 处两个Q 对其作用的合力为2F ,取x 轴方向为正方向. 有2221)1()(---=--=r x r kQq x r kQq F 因为a OC OB OA r 33==== Λ++=--r x r x 21)1(2当x 很小时可忽略高次项所以)361(321ax a Qq k F +-= 2322)24)((2-+++=hx h a x h kQq (略去2x 项) )233(363x hx a h aQq k +-= (略去2x 项) 因此带电质点所受合力为qx a Q k x aa x q a Q k F F F x 3221239)2336(3-=--=+= 由此可知,合外力x F 与x 大小成正比,方向相反.即该带电质点将做简谐运动,其振动周期为kQqam a k m T 32322ππ== 例9 欲测电阻R 的阻值,现有几个标准电阻、一个电池和一个未经标定的电流计,连成如图14—9所示的电路.第一次与电流计并联的电阻r 为50.00Ω,电流计的示度为3.9格;第二次r 为100.00Ω,电流计的示度为5.2格;第三次r 为10.00Ω,图14—9同时将待测电阻R 换成一个20.00k Ω的标准电阻,结果电流计的示度为7.8格.已知电流计的示度与所通过的电流成正比,求电阻R 的阻值.解析 在测试中,除待求量R 外,电源电动势E ,电源内阻r ,电流计内阻g R 以及电流计每偏转一格的电流0I ,均属未知.本题数据不足,且电流计读数只有两位有效数字,故本题需要用近似方法求解.设电源电动势为E ,电流计内阻为g R ,电流计每偏转一格的电流为0I ,用欧姆定律对三次测量的结果列式如下:从第三次测量数据可知,当用20k Ω电阻取代R ,而且r 阻值减小时电流计偏转格数明显增大,可推知R 的阻值明显大于20k Ω,因此电源内阻完全可以忽略不计,与R 相比,电流计内阻g R 与r 的并联值对干路电流的影响同样也可以忽略不计,故以上三式可近似为:09.35050I R R E g=+⋅ ① 02.5100100I R R E g =+⋅ ②08.7101020000I R E g=+⋅ ③ 待测电阻R=120k Ω解①、②、③三式,可得g R =50Ω例10 如图14—10所示,两个带正电的点电荷A 、B 带电量均为Q ,固定放在x 轴上的两处,离原点都等于r .若在原点O 放另一正点电荷P ,其带电量为q ,质量为m ,限制P 在哪些方向上运动时,它在原点O 才是稳定的?解析 设y 轴与x 轴的夹角为θ,正电点电荷P 在原点沿y 轴方向有微小的位移s 时,A 、B 两处的点电荷对P 的库仑力分别为A F 、B F ,方向如图14—10所示,P 所受的库仑力在y 轴上的分量为βαcos cos B A y F F F -= ①根据库仑定律和余弦定理得θcos 222rs s r kqQ F A ++= ② 图14—10θcos 222rs s r kqQ F B +-= ③ θθαcos 2cos cos 22rs s r sr +++= ④ θθβcos 2cos cos 22rs s r sr ++-=⑤将②、③、④、⑤式代入①得:因为s 很小,忽略2s 得: 又因为1cos 2,<≤θrs r s 所以利用近似计算x x 231)1(23μ≈±-得忽略2s 得)1cos 3(23--=θr kqQs F y 当(0)1cos 32>-θ时y F 具有恢复线性形式,所以在31cos 2>θ范围内,P 可围绕原点做微小振动,所以P 在原点处是稳定的.例11 某水池的实际深度为h ,垂直于水面往下看,水池底的视深为多少?(设水的折射率为n )解析 如图14—11所示,设S 为水池底的点光源,在由S 点发出的光线中选取一条垂直于面MN 的光线,由O 点垂直射出,由于观察者在S 正方,所以另一条光线与光线SO 成极小的角度从点S 射向水面点A ,由点A远离法线折射到空气中,因入射角极小,故折射角也很小,进入人眼的两条折射光线的反向延长线交于点S ′,该点即为我们看到水池底光源S 的像,像点S ′到水面的距离h ',即为视深.由几何关系有,/tan ,/tan h AO i h AB r ='=所以h h i r '=/tan /tan ,因为r 、i 均很小,则有i i r r sin tan ,sin tan ≈≈,所以h h i r '≈/sin /sin 又因ir n sin sin =所以视深n h h /=' 针对训练1.活塞把密闭气缸分成左、右两个气室,每室各与U 形管压强计的一臂相连,压强计的两臂截面处处相同.U 形管内盛有密度为5.7=ρ×102kg/m 3的液体.开始时左、右两气室的体积都为V 0=1.2×10-2m 3,气压都为0.40=ρ×103Pa ,且液体的液面处 在同一高度,如图14—12所示.现缓缓向左推动活塞,直到液体在U 形管中的高度差h =40cm.求此时左、右气室的体积V 1、V 2.假定两气室的温度保持不变.计算时可以不计U 形管和连接管道中气体的体积.取g =10m/s 2.2.一汽缸的初始体积为V 0,其中盛有2mol 的空气和少量的水(水的体积可忽略),其平衡 时气体的总压强是3.0大气压.经过等温膨胀使其体积加倍,在膨胀过程结束时,其中的 水刚好全部消失,此时的总压强为2.0大气压.若让其继续作等温膨胀,使其体积再次加 倍,试计算此时:(1)汽缸中气体的温度;(2)汽缸中水蒸气的摩尔数;(3)汽缸中气体的总压强. (假定空气和水蒸气均可当做理想气体处理)3.1964年制成了世界上第一盏用海浪发电的航标灯,它的气室示意图如图14—13所示.利用海浪上下起伏力量,空气能被吸进来,压缩后再推入工作室,推动涡轮机带动发电机发电.当海水下降时,阀门S 1关闭,S 2打开,设每次吸入压强为1.0×106Pa 、温度为7℃的空气0.233m 3(空气可视为理想气体),当海上升时,S 2关闭,海水推动活塞绝热压缩空气,空气压强达到32×105Pa 时,阀门S 1才打开.S 1打开后,活塞继续推动空气,直到气体全部推入工作室为止,同时工作室的空气推动涡轮机工作.设打开S 1后,活塞附近的压强近似保持不 变,活塞的质量及活塞筒壁间的摩擦忽略不计.问海水每次上升时所做的功是多少?已知 空气从压强为1ρ、体积为V 1的状态绝热的改变到压强为2ρ、体积为V 2的状态过程中, 近似遵循关系式1ρ/2ρ=(V 2/V 1)5/3,1mol 理想气体温度升高1K 时,内能改变为 3R/2.[R=8.31J/(mol·K)]4.如图14—14所示,在O x 轴的坐标原点O 处,有一固定的电量为)0(>Q Q 的点电荷,在L x -=处,有一固定的、电量为Q 2-的点电荷,今有一正试探电荷q 放在x 轴上0>x 的位置,并设斥力为正,引力为负.(1)当q 的位置限制在O x 轴上变化时,求q 的受力平衡的位置,并讨论平衡的稳定性;(2)试定性地画出试探电荷q 所受的合力F 与q 在O x 轴上的位置x 的关系图线.5.如图14—15所示,一人站在水面平静的湖岸边,观察到离岸边有一段距离的水下的一条 鱼,此人看到鱼的位置与鱼在水下的真实位置相比较,应处于什么方位.6.如图14—16所示,天空中有一小鸟B ,距水面高m h 31=,其正下方距水面深m h 42=处 的水中有一条小鱼A.已知水的折射率为4/3,则小鸟看水中的鱼距离自己是多远?小鱼看 图14—13图14—14到鸟距离自己又是多远?参考答案十一、图象法1.A 2.A 、D 3.C4.5.21t t > 6.乙图中小球先到底端 7.)21(2-+=n n n s a v B =)13(nas - 8.13.64s 9.2:1 10.D 11.FGf F gfs v f f Fg sFGt m )(2)(2-=-= 十二、类比法1.223/32Gt LR 2.2222)(R a aR kQ - 3.22222)()(R a aR kQ a q Q a R kQ --+ 4.F C AB μ9.2= 5.F C AB μ6=6.(1)C C 215-=' (2)C C '=总 (3)C C 215-=' 7.])([)(2tf f t H t H L N --+∆=λ(注:将“两块半透镜移开一小段距离”后加“L ∆”.在“f t > 处放置一个”与“单色点光源”之间加“波长为λ的”.)8.(1)m a 3105.0-⨯= (2)m d 4=十三、降维法1.0.288×103N ≤F ≤0.577×103N 2.(1)7.2N (2)0.8m/s 23.5N 沿斜面指向右上方水平方向的夹角为53 °4.2R R AB = 5.R R AB 94= 6.(1)r R AG 65= (2)r R AD 127= 十四、近似法1.V 1=0.8×10-2m 3 ,V 2=1.6×10-2m 3 2.(1)373K (2)2mol (3)1.0大气压3.8.15×104J 4.(1)平衡是稳定的 (2)5.应在鱼的右上方6.6m ,8m。
固体物理学中的近似方法

目录1、晶格振动和晶体热熔理论中的近似方法1.1格波的讨论1.2简正振动1.3长波近似2、能带理论中的近似方法2.1能带理论的基本假设2.2近自由电子近似2.3紧束缚近似2.4能带计算的近似方法1.1格波的讨论原子链的振动----一维布拉菲格子的情形(简谐近似)晶体中的原子并不是在各自的平衡位置上固定不动,而是为绕其平衡位置作振动。
晶体中各原子的振动是相互联系的。
用格波表述原子的各种振动模式,当原子间相互作用微弱时,原子的振动可近似为相互独立的简谐振动,这里的格波为平面简谐波,讨论的是简谐近似。
具体如下:考虑由一系列质量为m 的原子构成的一维原子链。
设平衡时原子间距为a 。
(如图一)由于热运动,原子离开各自的平衡位置,由此由于受到原子间相互作用所产生的恢复力,各原子具有返回平衡位置的趋势。
下面讨论在原子间相互作用下,原子所受恢复力与相对位移的关系。
设在平衡位置r=na 时,两个原子间的相互作用势能为U(na),产生相对位移后,相互作用势能变为U(na δ+)。
将U(na δ+)在平衡位置附近用泰勒级数展开,可得()2221()2nana d d U U na U na dr dr δδδ⎛⎫⎛⎫+=+++⎪ ⎪⎝⎭⎝⎭U (1)当振动很微弱时,δ很小,势能展式中只保留到2δ项,则第n+1个原子的恢复力近似为21,12()()n nna n n dU d Uf x x d drδβδβδ++=-=-=-=-- (2)图片1 一维原子链的振动式中 22()na d Udrβ= β称为恢复力常数,相当于弹性系数。
除受到第n+1个原子的作用力外,原子n 还受到第n-1个原子的作用力,其表达式为(),11n n n n f x x β--=- (3)公式编号右对齐如果仅考虑相邻原子的相互作用,则第n 个原子所受到的总作用力为()1,,1112n n n n n n n f f f x x x β+-+-=-=-+-第n 个原子的运动方程可以写为()21122nn n n d x m x x x dtβ+-=--- ()1,2,n N = (4) 对于每一个原子,都有一个类似式(4)的运动方程,方程的数目和原子数相同。
量子化学计算的近似方法
量子化学计算的近似方法量子化学计算是一种基于量子力学的计算方法,能够模拟分子之间的相互作用,为化学反应的研究提供了一种全新的方式。
但是,量子力学的计算非常复杂,特别是对于大分子来说,这种计算工作量巨大,需要消耗大量的计算资源。
为了解决这个问题,科学家们发展出了很多种近似方法,从而有效地降低了计算成本。
下面将对其中几种方法进行简要介绍。
1、Hartree-Fock方法(HF)HF方法是量子化学计算中最基本的方法之一。
它是一种平均场近似,假设每个电子都处在其他电子产生的平均势能场中。
这种近似虽然粗略,但是对于小分子的计算是可行的。
然而,对于大分子来说,HF方法的误差会变得很大,因为它忽略了电子之间的相互作用。
2、密度泛函理论(DFT)DFT方法是一种利用电子密度来近似描述分子体系的方法。
它假设电子云的能量完全由其密度决定,而非每个电子的轨道。
这种方法的优点在于计算成本较低,因为它省略了电子间的相互作用。
但是,它的精度有限。
一些弱相互作用,例如氢键、范德华吸引力等,无法被DFT很好地描述。
3、多体展开理论(MTA)MTA方法是一种利用量子化学中多体张量的展开,有效降低量子耦合计算的复杂度的方法。
它通过展开张量基函数,并减少未考虑的张量,来简化计算。
这种方法可以有效地处理大分子的计算问题,因为它最多只需要包含三体积分和四体积分的计算。
MTA方法在计算大分子的体系时,精度和计算效率都表现出良好的性能。
总之,这些近似方法都是为了降低量子化学计算的复杂度和计算成本,从而在实际应用中更加有效地模拟分子之间的相互作用。
无论是HF方法、DFT方法还是MTA方法,它们都能够为化学领域的研究提供有力的支持,并为近距离的化学反应提供了新的视角。
多体机械能守恒问题
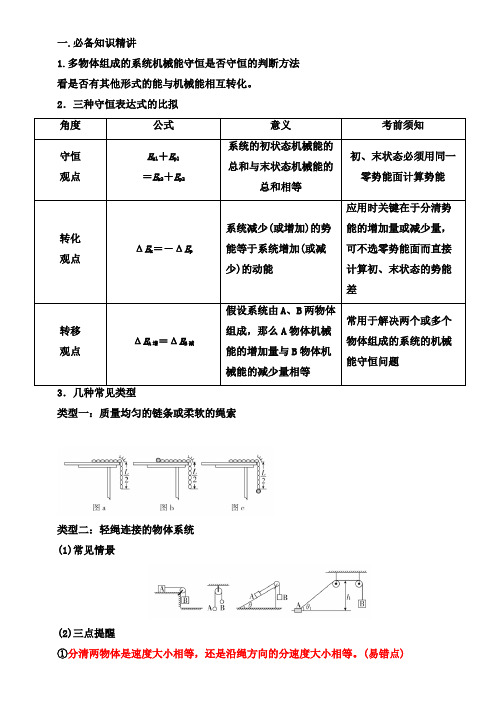
一.必备知识精讲1.多物体组成的系统机械能守恒是否守恒的判断方法看是否有其他形式的能与机械能相互转化。
2.三种守恒表达式的比拟角度公式意义考前须知守恒观点E k1+E p1=E k2+E p2系统的初状态机械能的总和与末状态机械能的总和相等初、末状态必须用同一零势能面计算势能转化观点ΔE k=-ΔE p系统减少(或增加)的势能等于系统增加(或减少)的动能应用时关键在于分清势能的增加量或减少量,可不选零势能面而直接计算初、末状态的势能差转移观点ΔE A增=ΔE B减假设系统由A、B两物体组成,那么A物体机械能的增加量与B物体机械能的减少量相等常用于解决两个或多个物体组成的系统的机械能守恒问题3.几种常见类型类型一:质量均匀的链条或柔软的绳索类型二:轻绳连接的物体系统(1)常见情景(2)三点提醒①分清两物体是速度大小相等,还是沿绳方向的分速度大小相等。
(易错点)②用好两物体的位移大小关系或竖直方向高度变化的关系。
③对于单个物体,一般绳上的力要做功,机械能不守恒;但对于绳连接的系统,机械能那么可能守恒。
类型三:轻杆连接的物体系统(1)常见情景(2)三大特点①用杆连接的两个物体,其线速度大小一般有以下两种情况:a.假设两物体绕某一固定点做圆周运动,根据角速度ω相等确定线速度v的大小。
b.“关联速度法〞:两物体沿杆方向速度大小相等。
②杆对物体的作用力并不总是沿杆的方向,杆能对物体做功,单个物体机械能不守恒。
③对于杆和球组成的系统,忽略空气阻力和各种摩擦且没有其他力对系统做功,那么系统机械能守恒。
类型四:几个接触的物体组成的连接体类型五:轻绳、物体轻弹簧组成的连接体〔下一节具体探讨〕二.典型例题精讲题型一:质量均匀的链条模型例1:一根质量为m、长为L的均匀链条一半放在光滑的水平桌面上,另一半悬在桌边,桌面足够高,如图a所示。
假设将一个质量也为m的小球分别拴在链条左端或右端,如图b、图c所示,约束链条的挡板光滑,三种情况下链条均由静止释放,当整根链条刚离开桌面时,设它们的速度分别为v a、v b、v c,那么关于v a、v b、v c的关系,以下判断中正确的选项是( )A .v a =v b =v c B.v a <v b <v c C .v c >v a >v b D.v a >v b >v c答案 C解析 设桌面下方L 处为零势能面。
高中物理-多体多过程动量守恒问题

多体多过程动量守恒问题名师指路【例1】(2013·山东卷)如图所示,光滑水平轨道上放置长坂A (上表面粗糙)和滑块C ,滑块B 置于A 的左端,三者质量分别为m A =2kg 、m B =1kg 、m C =2kg 。
开始时C 静止,A 、B 一起以v 0=5m/s 的速度匀速向右运动,A 与C 发生碰撞(时间极短)后C 向右运动,经过一段时间A 、B 再次达到共同速度一起向右运动,且恰好不再与C 碰撞。
求A 与C 发生碰撞后瞬间A 的速度大小。
思维导引:多体多过程动量守恒问题,其实就是多个一体、二体问题的组合,而每一个分阶段涉及的过程都是动量问题中的基本模型。
因此,清晰的物理过程和研究对象的准确选择,是多体多过程动量守恒问题解决的关键。
【名师指路】A 、C 碰撞是一个什么性质的碰撞?再就是A 、C 碰撞过程中,是否应该将B 扯进来?而题目中“(AB )且恰好不再与C 碰撞”内涵的挖掘,更是本题答题的关键。
突破上述问题,并将过程分析清楚,才能够顺利地完成本题。
解法1:分阶段分析法【名师指路】这种方法的基本套路是按照事物发展的先后顺序,一个阶段一个阶段的处理,分析过程中要注意不同阶段衔接点的速度——前一阶段的末速度即为下一阶段的初速度。
【名师指路】第一个问题是,A 、C 碰撞过程中,是否应该将B 扯进来?第一个问题,A 、C 碰撞过程时间极短,A 、C 间相互作用的内力远大于B 给A 的摩擦力,因此在碰撞这一过程中,A 、C 动量守恒;另一方面,由于碰撞时间极短,B 的速度也来不及发生明显改变,即A 、C 碰撞结束时,B 的速度仍为v 0。
【名师指路】第二个问题是,A 、C 碰撞是一个什么性质的碰撞(弹性的?完全非弹性的?),题目没做任何明示或者暗示,因此应该做最一般的假设,即两者速度不相同。
【解析】因碰撞时间极短,A 与C 碰撞过程动量守恒,设碰后瞬间A 的速度为v A ,C 的速度为v C ,由动量守恒定律得0A A A C C m v m v m v =+【名师指路】此时B 的速度是原来的v 0,而A 的速度因为与C 碰撞必然减小了,所以接下来B 将减速而A 将加速,直到AB 共速,这个过程中A 一直没有没有与C 碰撞。
多体问题
多体问题many-body problem天体力学和一般力学的基本问题之一,又称为N体问题[1],N表示任意正整数。
它研究N个质点相互之间在万有引力作用下的运动规律,对其中每个质点的质量和初始位置、初始速度都不加任何限制。
牛顿早就提出了这个问题。
作为研究天体系统的运动的一种力学模型,N个质点就代表N个天体,每个质点所受到的作用力就是它们之间的万有引力。
因此,这也是一种特殊的质点系统动力学,并已成为一般力学(理论力学)的专门分支。
对于一些特殊形状的天体,不能作为质点看待时,则须另行研究。
三百年来,大量的研究成果使多体问题成为天体力学中各个分支的共同基础,同时多体问题又有自己独立的研究课题。
主要研究课题可分为两类:一类是特殊的多体问题,另一类是共同性问题。
多体问题是一个十分复杂的理论问题,也是天体力学各个分支学科的共同基础课题。
当N=2时,即为二体问题,已完全解决。
N=3即成为著名的三体问题,除一些特殊的限制性三体问题可以得出特解外,一般三体问题仍是悬而未决的难题。
对于N>3的N体问题,根本无法求出分析解。
现在主要是采用数值方法和定性方法来进行研究。
特别是随着电子计算机的广泛使用,数值方法更成为研究N体问题的主要手段。
多体问题的数学公式天体力学中的普遍情况下的多体问题是一组已知初始值的常微分方程组:即已知初始值<IMG class=tex alt=" q_j(0), \quad\dot q_j(0), j=1,\ldots,n " src="http://u /math/b/2/2/b2246468e589cc73bcf0d892580b4b0d.png">(当j 不等于k 时,<IMG class=tex alt=" q_j(0) \neq q_k(0) " src="http://upload.wiki /math/e/d/f/edfd838a2a7b581c2a306f2af71a76e8.png">),解出这个二阶常微分方程组<IMG class=tex alt=" m_j \ddot q_j = \gamma \sum\limits_{k\neq j }^{n} \ frac{m_j m_k(q_j-q_k)}{|q_j-q_k|^3}, j=1,\ldots,n \qquad \qquad \qquad (1) " sr c="/math/9/e/d/9ed55288bbfef5e60e460159499163bf.p ng">其中<IMG class=tex alt=" m_1,m_2,\ldots m_n " src="http://upload.wikime /math/9/d/8/9d8c04a60c9b0a362055ed29890b16e9.png">是代表n个质点质量的常量。
2023年新教材高中物理新人教版必修第一册:多体平衡和动态平衡问题课件
【答案】(1)20 N (2)0.4
【解析】(1)对结点O受力分析如图甲所示,根据平衡条件,正交分 解T有
Tcos θ-m2g=0,Tsin θ-F=0, 代入数据解得F=20 N.
(2)物体A所受静摩擦力方向水平向右,对物体A受力分析如图乙所 示,根据物体平衡和临界条件,有F-fA=0,fA≤μm1g,解得μ≥0.4.即 物块A与桌面间的动摩擦因数至少为0.4.
(2)由斜面体平衡可知,地面对斜面体的摩擦力 大小为f=N2sin 37°=30 N,摩擦力的方向水平向 左.
(3)对金属球和斜面体整体受力分析,根据竖直 方向合力为0,可知FN=G1+G2=100 N.
变式2 如图所示,两段轻绳A、B连接两个小球1、2,悬挂在天花 板上.一轻弹簧C一端连接球2,另一端固定在竖直墙壁上.两小球均处 于静止状态.轻绳A与竖直方向、轻绳B与水平方向的夹角均为30°, 弹簧C沿水平方向.重力加速度为g.则m1∶m2=_______.
2.分析动态平衡问题的方法.
方法
步骤
(1)列平衡方程求出未知量与已知量的关系表达式 解析法
(2)根据已知量的变化情况来确定未知量的变化情况
(1)根据已知量的变化情况,画出平行四边形边、角的变化 图解法
(2)确定未知量大小、方向的变化
(1)根据已知条件画出两个不同情况对应的力的三角形和空
相似三 间几何三角形,确定对应边,利用三角形相似知识列出比
【答案】2∶1
【解析】对小球2受力分析如图甲,有FBsin 30°=m2g,对小球1受 力分析如图乙,将FB、m1g沿垂直FA方向正交分解,结合平衡条件可得 由FBsin 30°=m1gsin 30°,联立得m1=2m2,即m1∶m2=2∶1.
摩根斯顿算法
摩根斯顿算法摩根斯顿算法是一种用于计算分子轨道的量子化学方法。
它被广泛应用于计算机辅助药物设计、催化剂设计和材料科学等领域。
摩根斯顿算法的核心思想是将分子中的电子运动描述为一组基函数的线性组合,通过求解一个特殊的本征值问题来得到分子轨道的能量和波函数。
1. 简介摩根斯顿算法最早由John Pople和Walter Kohn在1960年代提出,它是一种基于密度泛函理论(DFT)的方法。
DFT是一种近似处理多体量子力学问题的方法,通过引入电子密度作为基本变量,将复杂的多体问题简化为求解一个单电子哈密顿量的问题。
摩根斯顿算法在DFT框架下,通过引入局域密度近似(LDA)或广义梯度近似(GGA)等近似方法,进一步简化了计算过程。
2. 算法原理摩根斯顿算法首先将分子中所有原子的核和电子构成一个总体系,然后将总体系划分为两个部分:核部分和电子部分。
核部分的运动由经典力学描述,而电子部分的运动则由量子力学描述。
摩根斯顿算法主要关注电子部分的运动。
在摩根斯顿算法中,电子的运动状态由波函数表示。
波函数是一个复值函数,它描述了电子在空间中的分布情况。
为了简化计算,摩根斯顿算法引入了一组基函数来展开波函数。
这些基函数通常是高斯型函数或平面波函数。
通过将波函数展开为基函数的线性组合,可以将求解多体薛定谔方程转化为求解一个特殊的本征值问题。
这个本征值问题可以通过数值方法(如矩阵对角化方法)来求解,得到分子轨道的能量和波函数。
3. 近似方法为了简化计算过程,摩根斯顿算法引入了一些近似方法。
其中最常用的是局域密度近似(LDA)和广义梯度近似(GGA)。
局域密度近似假设电子密度在空间上变化缓慢,因此可以将每个点上的局域电子密度视为均匀分布。
这样就可以用局域电子密度来近似整个系统的电子密度,从而简化计算。
广义梯度近似考虑了电子密度的梯度对能量的贡献,进一步提高了计算的精确度。
它通过引入电子密度的梯度来修正局域密度近似,从而更准确地描述电子间的相互作用。
量子多体理论的Hartree-Fock_近似

量子多体理论中的Hartree-Fock 近似邢玉恒(扬州大学 物理科学与技术学院 M14336)我们知道,Hartree-Fock 方程又简称为HF 方程是一个应用变分法计算多电子体系波函数的方程,是量子化学中最重要的方程之一,基于分子轨道理论的所有量子化学计算方法都是以HF 方程为基础的,鉴于分子轨道理论在现代量子化学中的广泛应用,HF 方程可以被称作现代量子化学的基石。
HF 方程的基本思路为:多电子体系波函数是由体系分子轨道波函数为基础构造的斯莱特行列式,而体系分子轨道波函数是由体系中所有原子轨道波函数经过线性组合构成的,那么不改变方程中的算子和波函数形式,仅仅改变构成分子轨道的原子轨道波函数系数,便能使体系能量达到最低点,这一最低能量便是体系电子总能量的近似,而在这一点上获得的多电子体系波函数便是体系波函数的近似。
在量子力学中,关于相互作用的量子力学系集的讨论的出发点是哈密顿函数223 0ˆˆˆ=-+x 2a H d x x U x m α⎡⎤∇ψψ⎢⎥⎣⎦⎰ ()()()的基态0|ϕ>,在0|ϕ>中,N 个粒子中每一个占据一个确定的单粒子态,因此它的运动与其他粒子无关。
这个情况明显的将被粒子间的相互作用修改;尽管如此,实验事实是,对于许多不同的系统,例如:金属、原子和核子,这种单粒子描述方法是一个非常好的近似。
因此一个自然的方法就是保留单粒子图像,而认为各个粒子是在一个单粒子势中运动,这个势来自这个粒子与其它粒子的平均相互作用。
于是,这个单粒子能量应该是未微扰能量加上对所有其它粒子占据的态进行了平均的相互作用势能。
这样,作为第一级近似,我们可以只保留对正规自能的第一级贡献,但是这样的计算不是完全自洽的。
考虑处于静态的且与自旋无关的外势场()U x 中的系统,例如,金属或原子中的电子,外势场破坏了空间均匀性,在绝热近似下,总的哈密顿量2230ˆˆˆ=-+x 2a H d x x U x m α⎡⎤∇ψψ⎢⎥⎣⎦⎰ ()()(), 33 11ˆˆˆˆ=x x ()*2d d v x αββαψψ''''H ψψ-⎰x x x x x ()()()()这里为简单起见,认为粒子间相互作用势与自旋无关()()v v λλμμλλμμδδ''-=-x x x x ,,,,、 相互作用的存在给求解带来困难,只能借助近似程序dinger oSchr 变分原理为 在约束1|>=<φφ下求><φφ||H 的极值,即0||>=<φφδH其解为>>=φφ||E HE 为Lagrange 乘子求变分的严格极值等于解多体问题是无希望的,然而可以在某条件下选定的子空间上求变分极值,虽然结果不是严格的,但在数学上是可行的。
物理学中的多体理论

物理学中的多体理论物理学是一门研究物质和能量以及它们之间相互作用的科学。
在这个领域里,多体理论是许多研究的焦点。
多体理论是一种研究多个物体之间相互作用的方法论。
它是理解一系列物理问题的重要理论框架。
在本文中,我们将深入研究物理学中的多体理论。
一. 概述多体理论是研究多个粒子或系统的相互作用的理论框架。
多体系统是由许多物质或粒子组成的。
这些粒子之间可以相互作用,这些相互作用会影响整个系统的行为。
多体理论是研究多个物体相互作用的数学和物理方法学。
多体系统可以是固体、液体或气体,也可以是原子、分子、电子、离子、准粒子等。
二. 多体系统的模型多体系统的理论建模是多体理论的核心。
为了研究多体系统,我们需要对系统的特性进行建模,以了解底层物理规律。
多体系统的建模可以分为微观方法和宏观方法。
微观方法体现的是基于原子、分子和基本相互作用的一系列理论。
基于微观方法,我们可以模拟并理解更大的物理系统,如结晶体、液晶、膜、生物分子等。
微观方法涉及从第一性原理到经验公式的多种建模策略。
因此,多体理论涉及许多物理领域,包括统计力学、量子力学和经典力学。
宏观方法主要关注集体现象、宏观系统的性质等问题。
它们通常适用于系统中的大量粒子或大量基元的咨询。
宏观方法包括大多数数值模型和统计且相对简单的解析模型,应用范围更为广泛。
三. 多体问题与相互作用多体问题涉及许多研究问题,其中最典型的是N体问题。
在N体问题中,我们研究N个物体之间相互作用的行为。
这些相互作用的性质可以反映具体的实验情形,也可以是虚拟的理论模型。
相互作用是多体系统的重要特征,理解不同类型的相互作用对多体系统的行为和性质有着重要的影响。
相互作用可以是物理力学上的力,也可以是化学键或量子力学中的非局域凝聚力等。
这些相互作用决定着多体系统的最终性质,例如固体的弹性、热导性、磁导性等。
四. 计算方法多体理论的另一个核心是计算方法。
对于N体问题,需要求解系统的能量、动量和位置等属性。
动力学方程数值解技巧探究
动力学方程数值解技巧探究动力学方程是描述物体在力的作用下运动状态变化的数学方程。
然而,通过解析方法求解动力学方程往往非常困难,因此数值解成为一种重要的求解方式。
本文将探究一些常用的动力学方程数值解技巧,包括欧拉法、龙格-库塔法、变步长法和多体问题的数值模拟方法。
一、欧拉法(Euler's Method)欧拉法是一种基本的数值解法,它通过将微积分中的微分近似为差分,将动力学方程转化为离散的差分方程。
具体步骤如下:1. 将时间区间等分为N个小时间步长,其中Δt为时间步长。
2. 假设初始条件为t=0时的位置和速度,即x(0)和v(0)。
3. 通过将动力学方程改写为差分形式,得到x(t+Δt)和v(t+Δt)的迭代式:x(t+Δt) = x(t) + v(t) * Δtv(t+Δt) = v(t) + a(t) * Δt其中a(t)为t时刻的加速度。
4. 重复以上步骤,直到达到所需的时间范围。
欧拉法的优点是简单易懂,计算速度快。
然而,这种方法存在一个明显的缺陷,即数值解的误差随着时间的增加会逐渐累积,导致计算结果的精度下降。
二、龙格-库塔法(Runge-Kutta Method)龙格-库塔法是一种常用的数值解法,通过使用多步迭代的方式提高结果的精度。
它的基本思想是根据当前的位置、速度和加速度估计下一个时间步长内的位置和速度。
具体步骤如下:1. 假设初始条件为t=0时的位置和速度,即x(0)和v(0)。
2. 通过使用多步迭代的方式,计算得到x(t+Δt)和v(t+Δt)的迭代式:k1 = v(t) * Δtl1 = a(x(t), v(t)) * Δtk2 = v(t + Δt/2) * Δtl2 = a(x(t) + k1/2, v(t) + l1/2) * Δtk3 = v(t + Δt/2) * Δtl3 = a(x(t) + k2/2, v(t) + l2/2) * Δtk4 = v(t + Δt) * Δtl4 = a(x(t) + k3, v(t) + l3) * Δtx(t+Δt) = x(t) + (k1 + 2k2 + 2k3 + k4)/6v(t+Δt) = v(t) + (l1 + 2l2 + 2l3 + l4)/6其中a(x(t), v(t))为相应位置和速度下的加速度。
高中物理多物体模型教案

高中物理多物体模型教案
主题:多物体模型在物理中的应用
教学目标:
1. 了解多物体模型在物理中的基本概念和应用;
2. 掌握使用多物体模型解决物理问题的方法;
3. 提高学生的物理问题解决能力和物理思维能力。
教学内容:
1. 多物体模型的基本概念;
2. 多物体系统的受力分析;
3. 多物体系统的加速度计算;
4. 多物体系统的应用案例。
教学方法:
1. 教师讲解相应理论知识;
2. 学生分组讨论解决问题;
3. 带领学生进行多物体模型实验。
教学过程:
1. 导入:通过展示一系列多物体系统的图片引发学生对多物体模型的兴趣,导入今天的教
学内容。
2. 理论讲解:介绍多物体模型的基本概念和相关公式,让学生了解多物体系统的受力分析
和加速度计算方法。
3. 案例分析:提供一个实际的多物体模型问题,让学生进行小组讨论,尝试解决问题。
4. 实验操作:组织学生进行一些多物体模型实验,让他们亲身体验多物体系统的运动规律。
5. 总结归纳:让学生总结今天学到的知识,强化他们对多物体模型的理解和应用能力。
教学评价:
1. 学生的小组讨论和实验操作表现;
2. 学生对多物体模型相关知识的掌握程度;
3. 学生在解决多物体系统问题时的思维能力和解决能力。
教学反思:
1. 是否能够让学生明确多物体模型在物理中的重要性;
2. 是否能够激发学生对多物体模型的兴趣和学习动力;
3. 是否能够满足不同学生的学习需求和提高他们的综合能力。
物理学中的多体量子系统

物理学中的多体量子系统在物理学的研究中,我们经常会遇到多体系统的问题。
多体系统由多个粒子组成,其中每个粒子都可以以量子力学的方式描述。
这类问题在固体物理、凝聚态物理、原子物理以及冷原子等领域中都有重要应用。
多体量子系统的研究可以追溯到20世纪初的量子力学的建立。
通过量子力学的形式化描述,我们可以将系统的状态用波函数表示,在时间演化过程中,波函数将会随着薛定谔方程的演化而改变。
对于多体系统,波函数需要包含每个粒子的坐标和自旋的信息。
多体量子系统的发展离不开统计力学的理论,尤其是量子统计力学。
量子统计力学研究的是如何描述多个相同或不同的粒子的行为,并从中得出物理量的平均值和概率分布。
常用的统计物理模型包括玻色-爱因斯坦凝聚和费米-狄拉克气体等。
在研究多体量子系统时,一个重要的问题是如何求解系统的基态和激发态。
由于多体系统的复杂性,我们往往无法直接求解精确的波函数。
因此,我们常常使用数值方法,如密度矩阵重整化群方法(DMRG)、变分蒙特卡洛方法和量子蒙特卡洛方法等来近似描述系统的态。
另一个关键的问题是多体系统的相互作用。
相互作用可以是无穷远范围的,也可以是局域范围的。
在无穷远相互作用的情况下,系统将呈现出集体激发行为,如凝聚态物理中的声子和磁子。
而对于局域相互作用,多体系统常常表现出强关联行为,如高温超导和量子纠缠等。
除了基本的多体量子系统,还存在一些特殊类型的多体系统,如拓扑量子系统和拓扑相变。
拓扑量子系统的研究涉及到拓扑性质与量子力学相互作用的研究。
这些系统在凝聚态物理领域引起了很大的关注,因为它们可能展现出一些非常奇特且有趣的现象,如拓扑绝缘体和量子霍尔效应。
近年来,基于多体量子系统的研究已经涌现出许多重要的发现和应用。
例如,通过控制多体系统的相干性,不仅可以实现高效的量子计算,还可以构建高精度的量子测量器。
此外,多体量子系统也被广泛应用于量子模拟、量子信息、量子通信等领域。
总之,物理学中的多体量子系统是一个庞大而复杂的研究领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(5)
(4)和(5)式代入(1)有
2 ℏ 2 ∇1 ∇ 2 [− ( − 2 )]ψ + V (r2 − r1 )ψ = Eψ 2 m1 m2
ℏ2 1 1 1 2 − [( )∇ e + ( + )∇ 2 ]ψ + V (r2 − r1 )ψ = Eψ 2 m1 + − ∇e − ∇ ]ψ + V (r )ψ = Eψ 2 M 2µ
⌢ ⌢ 2、全同粒子体系的哈密顿算符 H 在 P ij
⌢ ⌢ 3、 和 Pij H
之间的数学关系
的作用下不变
(全同粒子体系的哈密顿算符对于任何一对粒子的坐标互换是不变的)
⌢ ⌢ Pij H (⋯ , qi ,⋯ , q j , ⋯)ψ (⋯ , qi , ⋯ , q j ,⋯) ⌢ = H (⋯ , q j , ⋯ , qi , ⋯)ψ (⋯ , q j ,⋯ , q i ,⋯) ⌢ ⌢ = H (⋯ , qi , ⋯ , q j , ⋯) Pijψ (⋯ , qi , ⋯ , q j ,⋯)
⌢ ℏ2 d 2 1 2 H =− + kx + cx 3 + dx 4 2m dx 2 2
⌢ (3) E | E ' >= E ' | E ' >
⌢ (4)从 | E ' > 出发结合 W | H '> 和 H '
2、基本数学关系式。
可以求解(已知) (微扰项)近似的得到
⌢ ( E '−E ) | 0 >= 0
方程(7)可以用变量分离求解
2
2
(7)
ψ = ψ (re )ψ (r )
e i
(8) 代入(7)并乘以
(8)
1
ψ
ℏ2 1 ℏ2 2 2 9 − ∇ eψ e (re ) + i [− ∇ + V (r )]ψ = E = E e + E i (9) e ψ (r ) 2µ 2 Mψ
从(9)式即得:
y = y 2 − y1
(3)
z = z 2 − z1
其中
∂ ∂ ∂ ∇1 = i+ j+ k ∂x1 ∂y1 ∂z1
∂ ∂ ∂ ∇2 = i+ j+ k ∂x 2 ∂y 2 ∂z 2
2
转换坐标
⌢ ⌢ r1 和 r
到
r
和
⌢ re
(从(2)和(3)出发)
m1 ∂ ∂ ∂xe ∂ ∂x ∂ ∂ = + = − ∂x1 ∂xe ∂x1 ∂x ∂x1 m1 + m2 ∂xe ∂x
3、| ψ ( q1 , q2 , ⋯ , qn , t ) |
2
的意义:
在时刻t,第一个粒子在q1,第一个粒子在q2,…, 第n个粒子在qn的几率。 4、多体体系的薛定谔方程
ℏ2 2 [∑ − ∇ i + ∑ Vij ]ψ = Eψ 2 mi i i> j
5、 由于数学上无法对多体体系的薛定谔方程进行求, 必须引出用近似方法进行解决问题。(在下一节将作详细介绍)
分量表示为
xe (m1 + m2 ) = x1 m1 + x 2 m2
y e (m1 + m2 ) = y1 m1 + y 2 m2
(2)
z e (m1 + m2 ) = z1 m1 + z 2 m2
引入相对坐标
定义: 定义:
r ( x, y , z )
⌢ ⌢ r = r2 − r1
所以分量
x = x 2 − x1
< ψ 0 | O2 | ψ 0 >=< 12 | 12 > − < 12 | 21 >
⌢ E 0 =< ψ 0 | H | ψ 0 >=< ψ 0 | h(1) | ψ 0 > + < ψ 0 | h(2) | ψ 0 > + < ψ 0 | O2 | ψ 0 > =< 1 | h | 1 > + < 2 | h | 2 > + < 12 | 12 > − < 12 | 21 >
λ
取值如何?
(2)
⌢ Pjkψ = ψ
λ =1
λ = −1
对称波函数
⌢ Pjkψ = −ψ
反对称波函数
五 Pauli 原理 微观粒子: 玻色子 自旋量子数为整数 费米子 自旋量子数为半整数
对称波函数 反对称波函数
六、Slater 行列式
在单电子模型下,N个电子的波函数用一个行列式表示。
ψ A (q1 , q 2 ,...q N ) =
J ab =< ab | ab >
K ab =< ab | ba >
库仑积分 交换积分
$4-3 定态微扰理论 一 微扰理论的基本思想 1、基本思想 (1)真实体系
⌢ H | H ' >= H ' | H ' >
(2)微扰思想
(1)
⌢ ⌢ ⌢ H = E +W
分为二部分 且 例
(2)
⌢ ⌢ E >> W
设:第一个粒子的质量为m1,坐标为 r1 ( x1 , y1 , z1 ) 第二个粒子的质量为m2,坐标为
r2 ( x2 , y 2 , z 2 )
质心坐标为: 质心坐标为:
re ( xe , y e , z e )
根据质心坐标定义 质心坐标定义: 质心坐标定义
re (m1 + m2 ) = r1 m1 + r2 m2
结论得证。
为什么?)
⌢ Pjkψ = λψ
2、全同性原理: 全同粒子体系粒子的任意两粒子的互换对换不改变体系的状态。 即:
ψ
和
⌢ Pjkψ
表示同一态。
四、对称波函数和反对称波函数 因为
⌢ Pjkψ = λψ
(1)
那么:
⌢ ⌢ ⌢ Pjk Pjkψ = λPjkψ = λ2ψ = ψ
⌢ 用 P 作用(1)式两边 jk
P
七、有关slater 行列式的计算。 (一)H2的矩阵元计算。 1、Hamiltonian
ˆ = (− 1 ∇ 2 − ∑ Z A ) +(− 1 ∇ 2 − ∑ Z A ) + 1 H 1 2 2 r12 2 A r1 A A r2 A 1 = h(1) + h(2) + r12 = O1 + O2
上式可见,四项中,后两项为零。(正交性) (正交性)
1 * = ∫ dx1{χ 1* ( x1 )h(1) χ 1 ( x1 ) + χ 2 ( x1 )h(1) χ 2 ( x1 )} 2
同理,
< ψ 0 | h(2) | ψ 0 >=< ψ 0 | h(1) | ψ 0 >
* < ψ 0 | O1 | ψ 0 >= ∫ dx1{χ 1* ( x1 )h(1) χ 1 ( x1 ) + χ 2 ( x1 )h(1) χ 2 ( x1 )}
$4-2 全同性原理
一 全同粒子和全同粒子体系 1、全同粒子:质量、电荷、自旋等一切固有性质都相同的粒子。 2、全同粒子体系:多个全同粒子构成的体系。 二 全同粒子体系哈密顿算符的特点
⌢ 1、交换算符( Pij
⌢ −1 ⌢ Pij = Pji
)
⌢ Pij f (⋯, qi ,⋯, q j ,⋯) = f (⋯, q j ,⋯, qi ,⋯)
⌢ ⌢ ( E '− E ) | 1 > + a1 | 0 >= W | 0 >
1 * * = ∫ dx1 dx 2 {χ 1* ( x1 ) χ 2 ( x 2 )h(1) χ 1 ( x1 ) χ 2 ( x 2 ) + χ 2 ( x1 ) χ 1* ( x 2 )h(1) χ 2 ( x1 ) χ 1 ( x 2 ) 2 * * − χ 1* ( x1 ) χ 2 ( x 2 )h(1) χ 2 ( x1 ) χ 1 ( x 2 ) − χ 2 ( x1 ) χ 1* ( x 2 )h(1) χ 2 ( x1 ) χ 1 ( x 2 )}
第四章
多体问题与近似方法
$4-1 二体问题和多体问题
一、二体问题 1、什么是二体问题: 研究的体系含二个粒子。
2、两粒子体系的定态薛定谔方程为
ℏ2 2 ℏ2 2 (− ∇1 − ∇ 2 )ψ + V (r2 − r1 )ψ = Eψ 2m1 2m2
(1)
3、质心坐标和相对坐标。 (坐标系略 坐标系略) 坐标系略
同理有
m1 ∇2 = ∇e + ∇ m1 + m2
m1 m1 ∇ = ∇ 1∇ 1 = [ ∇ e − ∇][ ∇ e − ∇] m1 + m2 m1 + m2
2 1
m1 2m1 2 2 2 =( ) ∇e + ∇ − ∇ e∇ m1 + m2 m1 + m2
(4)
m2 2m 2 2 2 2 ∇ =( ) ∇e + ∇ + ∇ e∇ m1 + m2 m1 + m2
1 N!
ϕ 1 (q1 ) ϕ 2 (q1 )
ϕ1 (q 2 ) ⋯ ϕ1 (q N ) ϕ 2 (q 2 ) ⋯ ϕ 2 (q N )
⋮ ⋮ ⋱ ⋮ ϕ N (q N ) ϕ N (q 2 ) ⋯ ϕ N (q N )
ψ A (q1 , q 2 ,...q N ) =
1 N!
(−1) p Pϕ 1 (q1 )ϕ 1 (q1 )ϕ 2 (q 2 ) ⋯ϕ N (q N ) ∑