三、制动控制线路
三相异步电动机星三角形起动及带能耗制动控制线路的设计及调试

三相异步电动机星三角形起动及带能耗制动控制线路的设计及调试三相异步电动机是工业领域中常见的电动机类型之一,它具有结构简单、可靠性高、维护成本低等优点,因此被广泛应用于各种机械设备中。
在实际应用中,为了实现电动机的起停控制和能耗制动控制,需要设计合适的线路并进行调试。
本文将详细介绍三相异步电动机星三角形起动及带能耗制动控制线路的设计及调试方法。
一、星三角形起动原理介绍1.1 三相异步电动机基本原理三相异步电动机是以交流电作为供电源的,通过交变磁场与转子磁场之间的相互作用来实现转矩输出。
其基本原理是根据法拉第定律和楞次定律,在三个互相位移120度的线圈上产生旋转磁场,从而驱使转子旋转。
1.2 星型接线和三角形接线在实际应用中,根据不同的负载特性和启动要求,可以采用星型接线或者三角形接线方式来供电给电动机。
星型接线方式适用于起始转矩较小、启动时无冲击负载的情况,而三角形接线方式适用于起始转矩较大、启动时有较大冲击负载的情况。
1.3 星三角形起动原理星三角形起动是一种常用的电动机启动方式,它通过在电动机绕组中采用星型接线方式进行起动,待电动机达到一定速度后再切换为三角形接线方式运行。
这种启动方式可以减小起动时的电流冲击,降低对供电系统的影响。
二、星三角形起动控制线路设计2.1 电源接线设计在设计星三角形起动控制线路时,首先需要将三相异步电动机的绕组按照星型接线方式连接。
其中,每个绕组的一个端子连接到公共节点,即为星点连接;另一个端子分别与供电系统的A、B、C相相连。
2.2 接触器选择和布置为了实现起停控制,需要选择适当的接触器来实现切换绕组的连接方式。
通常情况下,采用交流接触器作为主要控制元件。
在布置接触器时,应保证其能够承受所需负载,并且能够方便地进行维护和检修。
2.3 控制电路设计在星三角形起动控制线路中,需要设计一个控制电路来实现接触器的自动切换。
该控制电路通常由主回路和辅助回路组成。
主回路用于控制接触器的通断,而辅助回路则用于监测电动机的运行状态并进行相应的保护。
同步电动机的基本控制线路
KM4 TA
A
M 3~
KM4
KV
KT2
KM2
G KM2 KM4 R2
R
R4 R5
A
KM1 KM2 KM3 KM4
R3
HL2 KM2
KT2
二、制动控制线路
三相同步电动机的制动采用能耗制动。制动时,
首先切断运转中的同步电动机定子绕组的交流电源, 然后将定子绕组接入一组外接电阻R(或频敏变阻器) 上,并保持转子励磁绕组的直流励磁不变。此时,同 步电动机就成为电枢被R短接的同步发电机,将转动
KT1线圈得电, KT1动作, KT2线圈得电动作
KM1 R1
KM3 QF2
I>
SB2 KM3 KM1
KT1
KA KM1 SB1
KM4 KT1 KA HL1 KT1 KT2
KM4 TA
A
M 3~
KM4
KV
KT2
KM2
G KM2 KM4 R2
R
R4 R5
A
KM1 KM2 KM3 KM4
R3
HL2 KM2
R
R4 R5
A
KM1 KM2 KM3 KM4
R3
HL2 KM2
KT2
QF1 L1 L2 L3
KV
U<
2.启动控制线路
KT2经延时后复位,KM4线圈 得电后动作。指示灯HL1熄灭, 启动过程结束。电动机全速运 行。
KM3 KM1
KM1 R1
KM3 QF2
I>
SB2 KM1
KT1
KA SB1
KM4 KT1 KA HL1 KT1 KT2
R1
KM
KT
KM
1. 异步启动法
三相交流异步电动机制动控制01(共7张PPT)
电动机正反转控制操作顺序的不同,有“正—停—反”控制电路与“正—反—停”控制电路。
由于是利用接触器(继电器)的常闭触点串接在对方线圈回
路中而形成的相互制约的控制称为电气互锁。这种连接保证
电气
了电路工作安全和可靠,因此在电气控制线路中,凡具有相
互锁
反动作的均需电气互锁。
电动机正反转控制线路,实质上是两个方向相反的单向运行电路的组合,并且在这两个方向相反的单向运行电路中加设必要的联锁。 再按停止按钮SB3,电动机停转。 将在同一时间里两个接触器只允许一个工作的控制作用称为互锁(联锁)。 这种连接保证了电路工作安全和可靠,因此在电气控制线路中,凡具有相反动作的均需电气互锁。 电(动1)机“正正—反停转—控反制”操控作制顺电序路的不同,有“正—停—反”控制电路与“正—反—停”控制电路。 电(动2)机正正—反反转—控停制”控操制作电顺路序的不同,有“正—停—反”控制电路与“正—反—停”控制电路。 控制电路中,我们将这种利用复合按钮的常闭触点串接在对方线圈回路中而形成的相互制约的控制称为机械互锁。 这将种在连 同接一保时证间了里电两路个工接作触安器全只和允可许靠一,个因工此作在的电控气制控作制用线称路为中互,锁凡(具联有锁相)反。动作的均需电气互锁。 电按动下机 正正向反起转动控按制钮线SB路1,接实触质器上K是M两1线个圈方得向电相吸反合的,单其向常运开行主电触路点的闭组合将,电并动且机在定这两子个绕方组向接相通反电的源单,向相运序行为U电、路V中、加W设,必电要动的机联正锁向。起动运 在行生。产实际中,往往要求控制线路能对电动机进行正、反转的控制。 电这动种机 连正接反保转证控了制电线路路工,作实安质全上和是可两靠个,方因向此相在反电的气单控向制运线行路电中路,的凡组具合有,相并反且动在作这的两均个需方电向气相互反锁的 。单向运行电路中加设必要的联锁。 在电生动产 机实正际反中转,控往制往操要作求顺控序制的线不路同能,对有电“正动—机停进—行反正”控、制反电转路的与控“正制—。反—停”控制电路。 按再停按止 停按止钮按钮SBS3B,3K,M电1动失机电停释转放。,电动机停转。 (1)“正—停—反”控制电路 按停止按钮SB3,KM1失电释放,电动机停转。 由于是利用接触器(继电器)的常闭触点串接在对方线圈回路中而形成的相互制约的控制称为电气互锁。 将在同一时间里两个接触器只允许一个工作的控制作用称为互锁(联锁)。
电气控制技术项目教程第3版 项目5 三相异步电动机制动控制电路安装与调试

任务三 反接制动控制电路安装与调试
一、反接制动控制电路
1、工作原理 反接制动是靠改变电动机定子绕组中三相电源的相序,产生一个与转子 转动方向相反的电磁转矩,从而使电动机迅速停转。
当电动机的 转速接近于 零时,应立 即切断电源, 否则电动机 将反向起动。
15
任务三 反接制动控制电路安装与调试
2. 控制电路
12
任务二 能耗制动控制电路安装与调试
二、电路安装 1.绘制布置图、接线图,在控制板上按布置图安装电器元件,
并贴上醒目的文字符号。 2.安装、接线。 在控制板上按原理图和接线图进行安装、
布线。安装电器元件的工艺要求同项目二、板前线槽布线 的工艺要求同项目三。 3.安装电动机、连接外部的导线 安装电动机做到安装牢固 平稳,以防止在换向时产生滚动而引起事故;连接电动机 和按钮金属外壳的保护接地线;连接电动机、电源等控制 板外部的导线。电动机连接线采用绝缘良好的橡皮线进行 通电校验。
13
任务二 能耗制动控制电路安装与调试
4.自检电路 5.通电试车
特别提示
• 1)时间继电器的整定时间不要过长,以免制动时 间过长引起定子绕组发热。 • 2)整流二极管要配装散热器和固定散热器支架。 • 3)制动电阻要安装在控制板外面。 • 4)进行制动时,停止按钮SB1要按到底。 • 5)通电试车时,一定要有教师在现场监护,同时 要做到安全文明生产。
能耗制动工作原理
10
任务二 能耗制动控制电路安装与调试
2.能耗制动电路
对于10KW以下 的小容量电动机可 以采用无变压器单 相半波整流电路, 而对于10KW以上容 量的电动机,多采 用由变压器的单相 桥式整流能耗制动 控制电路。
单相桥式整流能耗制动控制电路
三相异步电动机的制动控制线路(三)
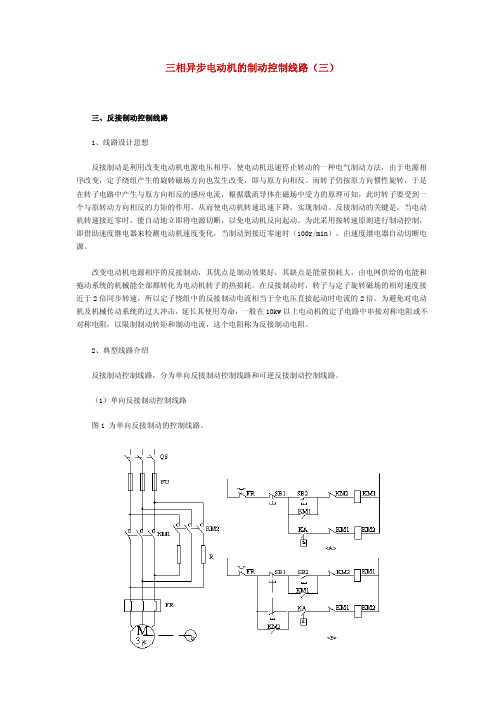
三相异步电动机的制动控制线路(三)三、反接制动控制线路1、线路设计思想反接制动是利用改变电动机电源电压相序,使电动机迅速停止转动的一种电气制动方法,由于电源相序改变,定子绕组产生的旋转磁场方向也发生改变,即与原方向相反。
而转子仍按原方向惯性旋转,于是在转子电路中产生与原方向相反的感应电流,根据载流导体在磁场中受力的原理可知,此时转子要受到一个与原转动方向相反的力矩的作用,从而使电动机转速迅速下降,实现制动。
反接制动的关键是,当电动机转速接近零时,能自动地立即将电源切断,以免电动机反向起动。
为此采用按转速原则进行制动控制,即借助速度继电器来检测电动机速度变化,当制动到接近零速时(100r/min),由速度继电器自动切断电源。
改变电动机电源相序的反接制动,其优点是制动效果好,其缺点是能量损耗大,由电网供给的电能和拖动系统的机械能全部都转化为电动机转子的热损耗。
在反接制动时,转子与定子旋转磁场的相对速度接近于2倍同步转速,所以定子绕组中的反接制动电流相当于全电压直接起动时电流的2倍。
为避免对电动机及机械传动系统的过大冲击,延长其使用寿命,一般在10kw以上电动机的定子电路中串接对称电阻或不对称电阻,以限制制动转矩和制动电流,这个电阻称为反接制动电阻。
2、典型线路介绍反接制动控制线路,分为单向反接制动控制线路和可逆反接制动控制线路。
(1)单向反接制动控制线路图1 为单向反接制动的控制线路。
图1 单向反接制动控制线路我们知道电动机正在正方向运行时,如果把电源反接,电动机转速将由正转急速下降到零。
如果反接电源不及时切除,则电动机又要从零速反向起动运行。
所以我们必须在电动机制动到零速时,将反接电源切断,电动机才能真正停下来。
控制线路是用速度继电器来“判断”电动机的停与转的。
电动机与速度继电器的转子是同轴连接在一起的,电动机转动时,速度继电器的动合触点闭合,电动机停止时动合触点打开。
工作过程如下:•按SB2→KM1通电(电动机正转运行) →KA的动合触点闭合→KM1断电•按SB1→KM2通电(开始制动)→n≈0,KA复位→KM2断电(制动结束)线路图1(A)有这样一个问题,在停车期间,如为调整工件,需要用手转动机床主轴时,速度继电器的转子也将随着转动,其动合触点闭合,接触器KM2得电动作,电动机接通电源发生制动作用,不利于调整工作。
三相异步电动机的制动控制-反接制动
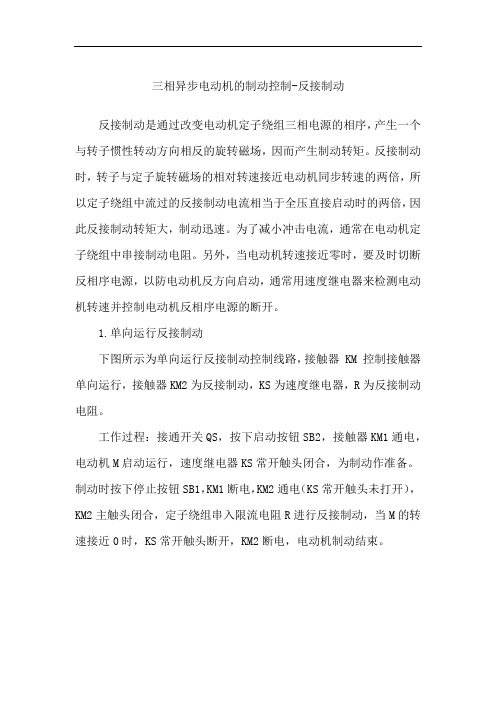
三相异步电动机的制动控制-反接制动反接制动是通过改变电动机定子绕组三相电源的相序,产生一个与转子惯性转动方向相反的旋转磁场,因而产生制动转矩。
反接制动时,转子与定子旋转磁场的相对转速接近电动机同步转速的两倍,所以定子绕组中流过的反接制动电流相当于全压直接启动时的两倍,因此反接制动转矩大,制动迅速。
为了减小冲击电流,通常在电动机定子绕组中串接制动电阻。
另外,当电动机转速接近零时,要及时切断反相序电源,以防电动机反方向启动,通常用速度继电器来检测电动机转速并控制电动机反相序电源的断开。
1.单向运行反接制动下图所示为单向运行反接制动控制线路,接触器 KM 控制接触器单向运行,接触器KM2为反接制动,KS为速度继电器,R为反接制动电阻。
工作过程:接通开关QS,按下启动按钮SB2,接触器KM1通电,电动机M启动运行,速度继电器KS常开触头闭合,为制动作准备。
制动时按下停止按钮SB1,KM1断电,KM2通电(KS常开触头未打开),KM2主触头闭合,定子绕组串入限流电阻R进行反接制动,当M的转速接近0时,KS常开触头断开,KM2断电,电动机制动结束。
2.可逆运行反接制动控制线路下图所示为可逆运行反接制动控制线路,KM1为正转接触器,KM2为反转接触器, KM3为短接电阻接触器,KA1、KA2、KA3为中间继电器,KS1为正转常开触头,KS2为反转常开触头,R为启动与制动电阻。
电动机正向启动和停车反接制动过程如下。
(1)正向启动时,接通开关QS,按下启动按钮SB2,KM1通电自锁,定子串入电阻R正向启动,当正向转速大于120r/min时,KS1闭合,因KM1的常开辅助触点已闭合,所以KM3通电将R短接,从而使电动机在全压下运转。
(2)停止运行时,按下停止按钮 SB1,接触器 KM1、KM3 相继失电,定子切断正序电源并串入电阻R,SB1的常开触头后闭合,KA3通电,常闭触点又再次切断KM3电路。
由于惯性,KS1仍闭合,且KA3(18-10)已闭合,使KA1通电,触点KA1(3-12)闭合,KM2通电,电动机定子串入R进行反接制动;KA1的另一触点(3-19)闭合,使KA3仍通电,确保KM3始终处于断电状态,R始终串入M的定子绕组。
三相异步电动机能耗制动控制线路
能耗制动控制策略
通过在定子绕组中通入直流电,产生恒定的磁场,使转子在原旋转磁场的作用下 减速。当转速接近零时,切断直流电源,实现准确停车。
电流控制策略
通过控制直流侧的电流,实现对电动机转矩的精确控制,提高系统的动态响应和 稳定性。
编程语言与工具
编程语言
通常使用C或C等高级编程语言进行软件 开发,这些语言具有丰富的库支持和高 效的运行性能。
详细描述:在某电梯的电机控制系统中,采用三相异步电动机能耗制动控制线路,确保了电梯运行的安全性和可靠性。该系 统有效降低了电梯故障率,提高了乘客的乘坐体验。
案例三:某矿山的电机控制系统
总结词:适应性强
详细描述:在某矿山的电机控制系统中,三相异步电动机能耗制动控制线路发挥了重要作用。该系统 能够适应矿山复杂的工作环境,确保电机在各种恶劣条件下稳定运行,提高了采矿作业的效率和安全 性。
06
三相异步电动机能耗制动控制 线路的实际应用案例
案例一:某工厂的电机控制系统
总结词:高效稳定
详细描述:某工厂采用三相异步电动机能耗制动控制线路,实现了电机的快速制 动和稳定运行。该系统在生产线上广泛应用于传送带、包装机等设备,提高了生 产效率和产品质量。
案例二:某电梯的电机控制系统
总结词:安全可靠
三相异步电动机能耗制动控 制线路
汇报人: 2023-12-24
目录
• 能耗制动控制线路概述 • 三相异步电动机能耗制动控制
线路的工作原理 • 三相异步电动机能耗制动控制
线路的硬件配置 • 三相异步电动机能耗制动控制
线路的软件设计
目录
• 三相异步电动机能耗制动控制 线路的优化与改进
• 三相异步电动机能耗制动控制 线路的实际应用案例
并励直流电动机的基本控制线路
L
KM3
KM6
KM7
KA RB
R1 SB3
KM3
R2 SB1
KM1
KV KM1
KT1 KM1
KM2
KM2 KM2 KM3 KM1 KM4 KM2 KM5
按下SB1 KM1线
KM2 KM1
M
SB2 KM5 KM4
圈得电
KT2
KM2 KM1 KV
KM1 KM2
I<
KA
KM1
KM2
KM3
KM4
KM5 KT1 KT2 KM6 KM7
KM1 KM2 KA
KT1 KT2KM3 KM4
QF L+ L
KT2瞬时断 开延时闭 合触头闭 合
并励直流电动机能耗制动原理
KM2 KM1
KA
SB2 SB1 KA1
KV A
KM1
M
V KM1
KM4
R
U<
RB
RB R1
KM1
I<
KM3
R2 KM1
KM1 KT1 KT2
KM1 KM2 KA
KT1 KT2KM3 KM4
头延时闭合, KM2 KM1
KM7线圈得
M
电
KM7触头闭
合
切除全部电
KV
阻
电动机继续 KM1 KM2 I< 启动
全速运行
KM1
KM1
SB2 KM5 KM4 KM2 KM1
KA
KM1
KM2
KM3
KM4
KM2 KM2 KM3 KM1 KM4 KM2 KM5
KT1 KM1 KM2
KT2
KM5 KT1 KT2 KM6 KM7
三相异步电动机基本控制电路全
电源
一部分接成星形,
一部分接成三角形
原始状态
起动结束后
换成三角形联结法
投入全电压
3. 三相绕线转子电动机的起动控制
➢ 转子电路中串接电阻 ➢ 转子电路中串接频敏变阻器
转子绕组串接电阻起动
优点:减小起动电流、提高起动转矩 适用:要求起动转矩较大的场合
起动时,电阻被短接的方式: 三相电阻不平衡短接法(用凸轮控制器)
~ SB1
SBF
KMF
FR
KMF
SBR
KMR
KMR
KMR
KMF
互锁
电器联锁(互锁)作用:两个接触器的辅
助常闭触头互相控制。正转时,SBR不起 作用;反转时,SBF不起作用。从而避免 两接触器同时工作造成主回路短路。
1.鼠笼式电机的正反转控制(3)--双重联锁
~ SB1
机械联锁
SBF
KMF
SBR
KMR
可逆运行反接制动
正转:KSF合 反转:KSR合
可逆运行反接制动
正转:KSF合 反转:KSR合
2. 防止电源电压恢复时, 电动机自行起动而造成 设备和人身事故
3. 避免多台电动机同时起 动造成电网电压的严重 下降。
异步机的直接起动----点动+连续运行控制
方法一: 用钮子开关SA
✓ 断开:点动控制 ✓ 合上:长动控制
异步机的直接起动----点动+连续运行控制
方法二:用复合按钮。
QK
~ SB1
而使线圈保持通电的控制方式
自锁触头: 起自锁作用的辅助常开触头
工作原理:
按下按钮(SB1),线圈(KM)通电, 电机起动;同时,辅助触头(KM)闭合, 即使按钮松开,线圈保持通电状态,电机 连续运行。
直流电动机常见控制线路
按下启动按钮SB1,接触器KM1线圈通电吸合并自锁,电动机在串 入全部启动电阻情况下降压起动。同时,由于接触器KM1的常闭触点断 开,使时间继电器KT1和KT2线圈断电。经一段延时候,其中KT1的常 闭延时闭合触点首先闭合,接触器KM2线圈通电,其常开触点闭合,将 启动电阻R1短接,电动机继续加速。然后,KT2常闭延时闭合触点延时 闭合,接触器KM3通电吸合,将电阻R2短接,电动机启动完毕,投入正 常运行。
设备控制技术
直流电动机常见控制线路
直流电动机按励磁方式分为他励、并励、串励和复励四种。并励及 他励直流电动机的性能及控制线路相近,他们多用在机床等设备中。在 牵引设备中,则以串励支流电动机应用较多。
直流电动机的控制包括直流电动机的起动、正反转、调速及制动的 控制。
1-1直流电动机的起动控制线路
直流电动机在起动最初的一瞬间,因为电动机的转速等于零,则反 电动势为零,所以电源电压全部施加在电枢绕组的电阻及线路电阻上。 通常这些电阻都是极小的,所以这时流过电枢电流很大,启动电流可达 额定电流的10~20倍。这样大的起动电流将导致电动机转向器和电枢绕 组的损坏,同时大电流产生转矩和加速度对机械传动部件也将产生强烈 的冲击。因此,如外加的是恒定电压,则必须在电枢回路中篡改如附加 电阻来起动,以限制起动电流。
三相异步电动机正反转启动能耗制动控制电路的安装与接线教案
教学设计
教学过程
教学环节教师讲授、指导(主导)内容
学生学习、
操作(主体)活动
时间
分配
一、二、组织教学 (师生问候)
教师确保设备已经调好,学生能够听见声音
新授知识
新课引入
一、实验目的
1、通过对接触器正、反转联锁控制线路的安装接线,掌握根
据原理图安装接线的方法;
2、掌握三相异步电机正、反转的工作原理
二、实验步骤
电路图
师生问好
作业设计:
用三个按钮控制一台电动机的启动停止,当按下绿色按钮时电动机正传,按下红色按钮时电动机停止。
再按下黑色按钮时电动机反转,按下红色按钮时电动机停止。
布置作业
完成习题册布置作业
三、。
2-18三相异步电动机的制动控制线路范文

2─18 三相异步电动机的制动控制线路2007-10-18 07:52:06| 分类:交流电动机实用控| 标签:|字号大中小订阅2─18三相异步电动机的制动控制线路某些生产机械,如车床等要求在工作时频繁的起动与停止;有些工作机械,如起重机的吊勾需要准确定位,这些机械都要求电动机在断电后迅速停转,以提高生产效率和保护安全生产。
电动机断电后,能使电动机在很短的时间内就停转的方法,称作制动控制。
制动控制的方法常用的有二类,即机械制动与电力制动,下面将这两种制动方法介绍如下。
一、机械制动机械制动是利用机械装置,使电动机迅速停转的方法,经常采用的机械制动设备是电磁抱闸,电闸抱闸的外形结构如图21801所示。
电磁抱闸主要由两部分构成:制动电磁铁和闸瓦制动器。
制动电磁铁由铁芯和线圈组成;线圈有的采用三相电源,有的采用单相电源;闸瓦制动器包括:闸瓦,闸轮,杠杆和弹簧等。
闸轮与电动机装在同一根转轴上. 制动强度可通过调整弹簧力来改变。
一)电磁抱闸制动控制线路之一电磁抱闸制动控制线路之一如图21802所示:电磁抱闸制动控制线路的工作原理简述如下:接通电源开关QS后,按起动按钮SB2,接触器KM线圈获电工作并自锁。
电磁抱闸YB线圈获电,吸引衔铁(动铁芯),使动、静铁芯吸合,动铁芯克服弹簧拉力,迫使制动杠杆向上移动,从而使制动器的闸瓦与闸轮分开,取消对电动机的制动;与此同时,电动机获电起动至正常运转。
当需要停车时,按停止按钮SB1,接触器KM断电释放,电动机的电源被切断的同时,电磁抱闸的线圈也失电,衔铁被释放,在弹簧拉力的作用下,使闸瓦紧紧抱住闸轮,电动机被制动,迅速停止转动。
电磁抱闸制动,在起重机械上被广泛应用。
当重物吊到一定高度,如果线路突然发生故障或停电时,电动机断电,电磁抱闸线圈也断电,闸瓦立即抱住闸轮使电动机迅速制动停转,从而防止了重物突然落下而发生事故。
二)电磁抱闸制动控制线路之二采用图21802控制线路,有时会因制动电磁铁的延时释放,造成制动失灵。
三相异步电动机的制动控制-电磁抱闸制动

三相异步电动机的制动控制-电磁抱闸制动电磁抱闸的外形和结构如图所示。
它主要的工作部分是电磁铁和闸瓦制动器。
电磁铁由电磁线圈、静铁心、衔铁组成;闸瓦制动器由闸瓦、闸轮、弹簧、杠杆等组成。
其中闸轮与电动机转轴相连,闸瓦对闸轮制动力矩的大小可通过调整弹簧弹力来改变。
电磁抱闸分为断电制动型和通电制动型两种。
断电制动型的工作原理如下:当制动电磁铁的线圈通电时,制动器的闸瓦与闸轮分开,无制动作用;当线圈失电时,闸瓦紧紧抱住闸轮制动。
通电制动型则是在线圈通电时,闸瓦紧紧抱住闸轮制动;当线圈失电时,闸瓦与闸轮分开,无制动作用。
电磁抱闸断电制动的控制线路如图所示。
启动运行:合上电源开关QS,按下按钮SB2,接触器KM线圈通电,其自锁触头和主触头闭合,电动机M接通电源,同时电磁抱闸制动线圈通电,衔铁与铁心吸合,衔铁克服弹簧拉力,使制动杠杆向上移动,从而使制动器的闸瓦与闸轮分开,电动机正常运转。
制动停转:按下按钮SB1,接触器KM线圈失电,其自锁触头和
主触头分断,电动机M失电,同时电磁抱闸制动线圈也失电,衔铁与铁心分开,在弹簧拉力的作用下,闸瓦紧紧抱住闸轮,电动机因制动而停转。
电磁抱闸制动在起重机械上被广泛采用。
其优点是能够准确定位,可防止电动机突然断电时重物的自行坠落。
这种制动方式的缺点是不经济。
因为电动机工作时,电磁抱闸制动线圈一直在通电。
另外,切断电源后,由于电磁抱闸制动器的制动作用,使手动调整很困难,对要求电动机制动后能调整工件位置的设备,只能采用通电制动控制线路。
三相异步电动机的制动控制原理

三相异步电动机的制动控制原理制动:就是给电动机一个与转动方向相反的转矩使它迅速停转(或限制其转速)。
制动的方法一般有两类:机械制动和电气制动。
机械制动:利用机械装置使电动机断开电源后迅速停转的方法叫机械制动。
机械制动常用的方法有:电磁抱闸和电磁离合器制动。
电气制动:电动机产生一个和转子转速方向相反的电磁转矩,使电动机的转速迅速下降。
三相交流异步电动机常用的电气制动方法有能耗制动、反接制动和回馈制动。
一、反接制动1.反接制动的方法异步电动机反接制动有两种,一种是在负载转矩作用下使电动机反转的倒拉反转反接制动,这种方法不能准确停车。
另一种是依靠改变三相异步电动机定子绕组中三相电源的相序产生制动力矩,迫使电动机迅速停转的方法。
反接制动的优点是:制动力强,制动迅速。
缺点是:制动准确性差,制动过程中冲击强烈,易损坏传动零件,制动能量消耗大,不宜经常制动。
因此反接制动一般适用于制动要求迅速、系统惯性较大,不经常启动与制动的场合。
2.速度继电器(文字符号KS)速度继电器是依靠速度大小使继电器动作与否的信号,配合接触器实现对电动机的反接制动,故速度继电器又称为反接制动继电器。
感应式速度继电器是靠电磁感应原理实现触头动作的。
从结构上看,与交流电机类似,速度继电器主要由定子、转子和触头三部分组成。
定子的结构与笼型异步电动机相似,是一个笼型空心圆环,有硅钢片冲压而成,并装有笼型绕组。
转子是一个圆柱形永久磁铁。
速度继电器的结构原理图速度继电器的符号速度继电器的轴与电动机的轴相连接。
转子固定在轴上,定子与轴同心。
当电动机转动时,速度继电器的转子随之转动,绕组切割磁场产生感应电动势和电流,此电流和永久磁铁的磁场作用产生转矩,使定子向轴的转动方向偏摆,通过定子柄拨动触头,使常闭触头断开、常开触头闭合。
当电动机转速下降到接近零时,转矩减小,定子柄在弹簧力的作用下恢复原位,触头也复原。
常用的感应式速度继电器有JY1和JFZ0系列。
三相异步电动机的制动控制线路

KM SB2
KM
电磁抱闸断电制动控制线路
QS
FU1
FU2
L1 L2 L3
KH SB1
按下SB2 KM线圈得电
KM KH
YB
M 3~
KM SB2
KM
电磁抱闸断电制动控制线路
QS
FU1
FU2
L1 L2 L3
KM1自锁触头闭合,自 KM
锁,松开SB2
KH
电磁抱闸线圈YB得电,
使抱闸的闸瓦与闸轮
分开
YB
KM2自锁触头闭合 KM2主触头分断闭合 电动机半波能耗制动 KM2联锁触头分断 KT瞬时闭合触头闭合 松开SB2
KH
U
V
W
M 3~
KH
SB2
KT
KM2
SB1
KM1
KT
KM2
KM1
KM1
KM2
KT
单向启动能耗制动自动控制线路
QS
FU1
L1 L2 L3
V
KM1 KM2
FU2 KM2
KT延时断开触头延 时分断 KM2线圈失电 KT线圈失电 各触头复位
U
V
W
M 3~
FU2
KH SB2
KT
KM1
KM2
SB1
R
KM2
KM1 KM1
KM1
KM2
KT
=
电容制动
QS
FU1
L1 L2 L3
KM1
KM1自锁触头闭合
KM1主触头闭合
KM1联锁触头分断
KM1辅助触头闭合
KH
KT线圈得电
KT瞬时闭合延时断开
U
V
W
三相异步电动机制动控制ppt课件全文

第一节 机械制动 第二节 电力制动
8/16/2024
返回第一张
上一张幻灯片 下一张幻灯片
制动:就是给电动机一个与转动方向相反的转矩使它 迅速停转(或限制其转速)。
制动的方法一般有两类:机械制动和电力制动。
第一节 机械制动
利用机械装置使电动机断开电源后迅速停转的方法叫机械制动。 机械制动常用的方法有:电磁抱闸制动器制动和电磁离合器制动。
常用电磁铁的符号如上页图4‐1b)、c)、d)所示。
(2)直流电磁铁
线圈中通以直流电的电磁铁称为直流电磁铁。 直流长行程制动电磁铁主要用于闸瓦制动器,其工作原理与 交流制动电磁铁相同。MZZ2—H型电磁铁的结构如下页图4‐2所 示。
8/16/2024
返回第一张
上一张幻灯片 下一张幻灯片
图4‐2 直流长行程制动电磁铁的结构 1—黄铜垫圈 2—线圈 3—外壳4—导向管 5—衔铁 6—法兰 7—油封
型号及含义:
8/16/2024
返回第一张
上一张幻灯片 下一张幻灯片
结构如图4‐1所示。
8/16/2024
图4‐1 MZDI型制动电磁铁与制动器 a) 结构 b) 电磁铁的一般符号 c) 电磁制动器符号 d) 电磁阀符号 1—线圈 2—衔铁 3—铁心 4—弹簧 5—闸轮 6—杠杆 7—闸瓦 8—轴
返回第一张
图4‐8 JY1速度继电器结构原理图及符号 1‐转子 2‐电动机轴 3‐定子 4‐绕组 5‐定子柄 6、7‐静触点 8、9‐簧片(动触点)
它主要由定子、转子和触点三部分组成。 一般情况下,速度继电器的触点,在转速达120r/min时能动 作,低于100r/min左右时能恢复正常位置。 速度继电器在电路图中的符号如图4‐8所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
KM1 KM2
KA1
KT2线圈失电 其动断触头延 时闭合, KM5线圈得 KT2 电
电动机起动完 毕,正常运行
KA1
KA2
R2
R1 KT1
RB
KM5 KM4 KM3
KM
I> KA
KA2
KA KT1 KT2
KV
KM KM1 KM2 KM3 KM4 KM5
QF L+ L-
KM
KM1
KM2
M
KV AC 前
圈失电
KV
R KM3
SB2
KM1 KM1
SB1
KM1 KM2
KV
KT
SB2
KM2
KM1
KM1 KM2
KT KM3
QF L+ L-
串励直流电动机自励式能耗制动控制电路
KM2
KM1 KM2 KM2
KT动断触头
延时闭合,
KM3得电, KM1 KM2
起动过程结束
M KM1 RB
KV
R KM3
SB2
KM1 KM1
KA1
KA1
KA2
电动机正转:
KA2
AC手柄置 “前”位置,
KT2
KM,KM1线圈 得电动作,电 动机串联电阻 起动
R2
R1 KT1
RB
KM5 KM4 KM3
KM
I> KA
KA KT1
KT2
KV
KM KM1 KM2 KM3 KM4 KM5
QF L+ L-
KM
KM1
KM2
M
KV AC 前1
0
后1
KM1 KM2
KM1 KM2
KA1
KM1动合辅 助触头闭合, KA1线圈得电 电阻RB被除 KT2 数短路
KA1
R2
R1 KT1
RB
KA2
KM5 KM4 KM3 KM
KA2
KA KT1 KT2
KV
KM KM1 KM2 KM3 KM4 KM5
I> KA
QF L+ L-
KM
KM1
KM2
M
KV AC 前1
0
后1
KM1 KM2
R3
R
KM1
SQ2 KM1 KM2
串励直流电动机(作伺服电动机)他励式能耗制动控制电路
QF L+ L-
SB1
SB2
KM1
合上电源开关
QF
KM1
R1
KM2 M
KM1
KM2 R2
KM2
SQ1 KM2
R3
R
KM1
SQ2 KM1 KM2
串励直流电动机(作伺服电动机)他励式能耗制动控制电路
QF L+ L-
串励直流电动机(作伺服电动机)他励式能耗制动控制电路
QF L+ L-
SB1
SB2
按下SB2
KM1
KM1 R1
KM2 M
KM1
KM2 R2
KM2
SQ1 KM2
R3
R
KM1
SQ2 KM1 KM2
2.串励直流电动机反接制动控制电路
(1)位能负载时转速反向法这种方法就是强迫电动机的 转速反向,使电动机的转速方向与电磁转矩的方向相 反,以实现制动。
KM1
KM1 KM2
KT KM3
QF L+ L-
串励直流电动机自励式能耗制动控制电路
KM2
KM1 KM2 KM2
当速度降低到
较低时,KV
释放,各电器 KM1 KM2
触头复位,制
M KM1 RB
动结束。
KV
R KM3
SB2
KM1 KM1
SB1
KM1 KM2
KV
KT
SB2
KM2
KM1
KM1 KM2
KT KM3
KM1 KM2 M KM1 RB KV
R KM3
SB2
KM1 KM1
SB1
KM1 KM2
KV
KT
SB2
KM2
KM1
KM1 KM2
KT KM3
QF L+ L-
串励直流电动机自励式能耗制动控制电路
KM2
KM1 KM2 KM2
起动控制:
按下SB1,电
动机串联电阻 KM1 KM2
R起动,KT线
M KM1 RB
KM1 KM2
KA1
KT1线圈失电 其动断触头延 时闭合, KM4线圈得 KT2 电
KA1
R2
R1 KT1
RB
KA2
KM5 KM4 KM3 KM
KA2
KA KT1 KT2
KV
KM KM1 KM2 KM3 KM4 KM5
I> KA
QF L+ L-
KM
KM1
KM2
M
KV AC 前1
0
后1
KM1 KM2
后
KM1 KM2
KM1 KM2
KA1
KA1
KA2
合上电源开关
KA2
QF
R2 KM5
AC手柄置“0”KT2
R1 KT1
KM4
位置
RB
KM3
KM
KA KT1
KT2
KV
KM KM1 KM2 KM3 KM4 KM5
I> KA
QF L+ L-
KM
KM1
KM2
M
KV AC 前1
0
后1
KM1 KM2
KM1 KM2
三、制动控制线路
1. 能耗制动控制电路
串励直流电动机的能耗制动分为自励式和他励式两种。
(1)自励式能耗制动 自励式能耗制动是指当电动机断开 电源
后,将励磁绕组反接并与电枢绕组和制动电阻串联构成 闭合
回路,使惯性运转的电枢处于自励发电状态,产生与原 方向
相反的电流和电磁转矩,迫使电动机迅速停转。
QF L+ L-
SB1
SB2
按下SB1
KM1
KM1 R1
KM2 M
KM1
KM2 R2
KM2
SQ1 KM2
R3
R
KM1
SQ2 KM1 KM2
串励直流电动机(作伺服电动机)他励式能耗制动控制电路
QF L+ L-
SB1
SB2
松开SB1
KM1
KM1 R1
KM2 M
KM1
KM2 R2
KM2
SQ1 KM2
R3
R
KM1
SQ2 KM1 KM2
(2)电枢直接反接法
QF
L+
KM
L-
KM1
KM2
M
KV AC 前
后
KM1 KM2
KM1 KM2
KA1
KA1
KA2
电路组成分析
KA2
R2
R1 KT2 KT1
RB
KM5 KM4
KM3 KM
KA KT1
KT2
KV
KM KM1 KM2 KM3 KM4 KM5
I> KA
QF L+ L-
KM
KM1
KM2
M
KV AC 前
SB1
KKM1
KM1 KM2
KT KM3
QF L+ L-
串励直流电动机自励式能耗制动控制电路
KM2
KM1 KM2 KM2
按下SB2, KM1失电, 能耗制动开始 KM1 KM2
M KM1 RB KV
R KM3
SB2
KM1 KM1
SB1
KM1 KM2
KV
KT
SB2
KM2
串励直流电动机自励式能耗制动控制电路
KM2
KM1 KM2 KM2
电路组成分析
KM1 KM2 M KM1 RB KV
R KM3
SB2
KM1 KM1
SB1
KM1 KM2
KV
KT
SB2
KM2
KM1
KM1 KM2
KT KM3
QF L+ L-
串励直流电动机自励式能耗制动控制电路
KM2
KM1 KM2 KM2
合上电源开关 QF
(2)他励式能耗制动制动时,切断电动机电源,将电枢绕组 与放电电阻R1接通,将励磁绕组与电枢绕组断开后串入分 压电阻R2,再接入外加直流电源励磁。
串励直流电动机(作伺服电动机)他励式能耗制动控制电路
QF
L+ L-
SB1
SB2
KM1
电路组成分析
KM1
R1
KM2 M
KM1
KM2 R2
KM2
SQ1 KM2
后
KM1 KM2
KM1 KM2
KA1
电枢直接反接 将AC手柄扳 置“后”位置, 电枢因接入反 KT2 向电流而制动
KA1
R2
R1 KT1
RB
KA2
KM5 KM4 KM3 KM
KA2
KA KT1 KT2
KV
KM KM1 KM2 KM3 KM4 KM5
I> KA