六自由度KUKA机器人编程与操作
KUKA机器人6轴无限旋转设置
KUKA机器人轴无限旋转设置
在实际生产应用中,有时候可能需要机器人单个轴无限旋转,对于没有硬限位的轴来说可以进行无限旋转设置。
常用到的是A6轴无限旋转,KUKA机器人通过以下步骤进行设置。
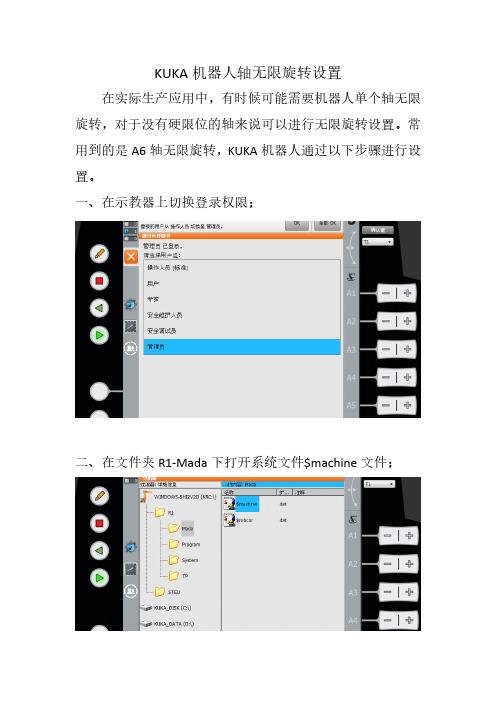
一、在示教器上切换登录权限;
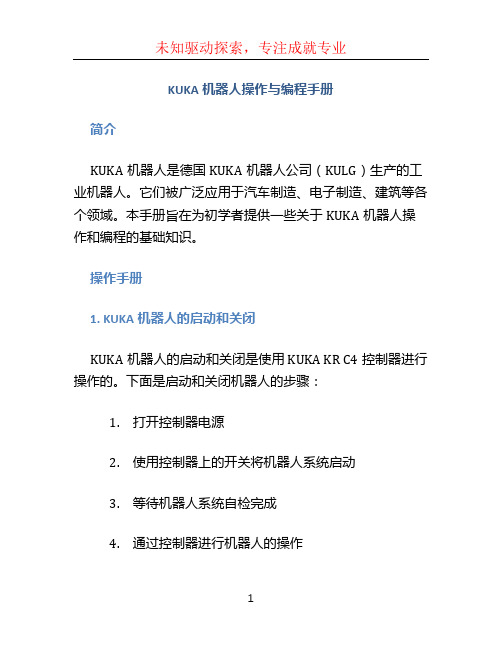
二、在文件夹R1-Mada下打开系统文件$machine文件;
三、程序中有关于各个轴的轴类型解释;
其中:1=LINEAR代表直线轴,
3=ROTATORISCH代表旋转轴,
5=ENDLOS代表无限旋转轴。
可以看出6个轴默认的都为旋转轴。
四、如果需要将A6轴设置为无限旋转,则将A6轴的轴类型
改为5即可。
保存文件选择【是】。
KUKA机器人编程手册[4]
![KUKA机器人编程手册[4]](https://img.taocdn.com/s3/m/fd2af613657d27284b73f242336c1eb91a37338b.png)
KUKA机器人编程手册KUKA编程手册一、概述二、系统的结构和功能2.1 技术入门机械系统:的物理结构,包括关节、连杆、末端执行器等,决定了的运动范围和能力。
传感系统:的感知部分,包括位置、速度、力、温度、视觉等传感器,用于获取自身或环境的信息。
控制系统:的核心部分,包括控制柜、电源、通信接口等,用于控制的运动和行为。
编程系统:的软件部分,包括操作系统、应用软件、编程语言等,用于设定的任务和逻辑。
2.2 库卡的机械系统基座:固定在地面或其他平台上,支撑整个结构。
A1轴:位于基座上方,控制整个机械臂的水平旋转。
A2轴:位于A1轴上方,控制整个机械臂的垂直旋转。
A3轴:位于A2轴上方,控制中间连杆的垂直旋转。
A4轴:位于A3轴上方,控制末端连杆的水平旋转。
A5轴:位于A4轴上方,控制末端连杆的垂直旋转。
A6轴:位于A5轴上方,控制末端执行器(如夹具、焊枪等)的水平旋转。
2.3 控制系统(V)KR C4高性能:采用多核处理器和实时操作系统,实现高速、高精度和高稳定性的运动控制。
高集成:集成了电源、安全、通信、诊断等功能模块,实现了紧凑、简洁和易维护的设计。
高兼容:支持多种总线和接口标准,如EtherCAT、EtherNet/IP、PROFINET等,实现了与不同厂商和设备的无缝连接。
高扩展:支持多种扩展模块和选件,如外部轴、视觉系统、力控系统等,实现了多样化和定制化的应用需求。
2.4 KUKA smartPAD易用:采用触摸屏和按键的组合方式,实现了直观、方便和快捷的操作体验。
明晰:采用高分辨率和高亮度的显示屏,实现了清晰、鲜艳和易读的显示效果。
强大:集成了多种功能和模式,如手动、自动、编程、诊断等,实现了全面、灵活和高效的控制。
三、的操作和编程3.1 KUKA.ControlStudio软件统一:采用统一的软件平台,实现了控制系统和KUKA smartPAD的一致性和互操作性。
简洁:采用简洁的用户界面,实现了清晰、易懂和易用的操作指引。
第4章KUKA机器人编程ppt课件

篮 球 比 赛 是 根据运 动队在 规定的 比赛时 间里得 分多少 来决定 胜负的 ,因此 ,篮球 比赛的 计时计 分系统 是一种 得分类 型的系 统
第 4 章 KUKA机器人 编程
4.1.2 创建程序流程图
程序流程图的作用
1)用于程序流程结构化的工具。 2)程序流程更加易读。 3)结构错误更加易于识别。 4)同时生成程序的文献。
第 4 章 KUKA机器人 编程
子程序
在KUKA机器人编程过程中,可将程序中需要多次使用而不 需发生变化的可独立程序段单独建立为子程序,可避免程序 码重复,节省存储空间,使程序结构化,分解总任务,方便 排除程序错误。
子程序示例:
DEF MAIN() INI LOOP
GET_PEN() PAINT_PATH() PEN_BACK() GET_PLATE() GLUE_PLATE() PLATE_BACK() IF $IN[1] THEN
DEF PICK_CUBE() ;该程序将方块从库中取出 ;作者:Max Mustermann ;创建日期:2016.01.03 INI … END
篮 球 比 赛 是 根据运 动队在 规定的 比赛时 间里得 分多少 来决定 胜负的 ,因此 ,篮球 比赛的 计时计 分系统 是一种 得分类 型的系 统
篮 球 比 赛 是 根据运 动队在 规定的 比赛时 间里得 分多少 来决定 胜负的 ,因此 ,篮球 比赛的 计时计 分系统 是一种 得分类 型的系 统
第 4 章 KUKA机器人 编程
1)FOLD通常在创建后首先显示成关闭状态:
DEF Main()
…
INI
;KUKA FOLD 关闭
SET_EA
工业机器人基础编程与操作 模块二 KUKA机器人操作基础

2
3
功能概述说明见表2-1-1。KUKA smartPAD后面板示意图,如图 4
2-1-2所示,各部件的功能概述说明见表2-1-2。 5
6
7
8
9
10
11
12
13
14
15
图2-1-1 KUKA smartPAD前面板示意图
表2-1-1 KUKA smartPAD前面板示主要部件功能说明
部件名称
说明
断开连接按钮 钥匙开关 急停按钮 6D鼠标 移动键
表2-1-3 KUKA smartHMI操作界面主要功能说明
标号
部件名称
说明
1
状态栏
用于显示工业机器人特定中央设置的状态。
2
提示信息计数器
提示信息计数器显示每种提示信息类型各有多少条提示信息。触摸提示信息计数 器可放大显示。
根据默认设置将显示最后一条提示信息。触摸提示信息窗口可放大该窗口并显示
3
信息窗口
1. KUKA机器人示教器的认识—考核评价
成功了吗? 检查了吗? 评价了吗? 反馈了吗?
Text Text Text Text
分值 评价 (10分)
项目 感兴趣程度
任务明确程度 学习主动性 工作表现 协作精神 时间观念
任务完成熟练程度 理论知识掌握程度
任务完成效果 文明安全生产
总评
自我评价
小组评价
1. KUKA机器人示教器的认识—任务实施
一、察看KUKA smartPAD示教器,记录开关、按键位置 察看KUKA smartPAD示教器确认开关、紧急停止开关、启动开 关等,手持KUKA smartPAD,示教器尝试确认开关的使用。 察看KUKA smartPAD示教器上各功能键区、菜单键区、数字键 区等各键功能,并记录其功能。
KUKA机器人编程手册[5]
![KUKA机器人编程手册[5]](https://img.taocdn.com/s3/m/09edab0ca22d7375a417866fb84ae45c3a35c256.png)
KUKA机器人编程手册KUKA编程手册一、概述KUKAControlStudio是一个用于开发和运行程序的软件平台,它支持多种编程语言和接口,包括MC-Basic、C、Python、ROS等。
KUKA ControlStudio可以在Windows或Linux操作系统上运行,可以通过网线或无线网络与控制器进行通信。
KUKAControlStudio提供了一个图形化的用户界面,可以方便地创建、编辑、调试和管理程序。
KUKAControlStudio还提供了一个软件开发工具包(SDK),可以用于开发自定义的应用程序和扩展功能。
二、安装和启动要使用KUKAControlStudio,您需要先并安装相应的软件包。
您可以从库卡中心¹获取最新版本的KUKAControlStudio软件包,以及相关的操作系统和应用软件手册¹。
安装过程根据不同的操作系统和硬件配置可能有所不同,请参考手册中的详细说明。
安装完成后,您可以通过双击桌面上的快捷方式或从开始菜单中选择KUKAControlStudio来启动软件。
启动后,您会看到一个欢迎界面,显示了一些常用的选项,如创建新项目、打开现有项目、连接等。
您也可以从菜单栏或工具栏中选择相应的功能。
三、连接要使用KUKAControlStudio编写和运行程序,您需要先与控制器建立连接。
您可以通过网线或无线网络来实现连接,但需要确保您的电脑和控制器处于同一局域网内,并且设置了正确的IP地址。
在控制柜上打开电源开关,并等待系统启动完成。
在控制柜上找到一个带有显示屏和按键的模块,这是控制器的用户界面。
在用户界面上按下菜单键(M),然后选择“设置”(S)。
在设置菜单中选择“网络”(N),然后选择“IP地址”(I)。
在IP地址菜单中输入您想要设置的IP地址,例如192.168.1.100,并按下确认键(O)。
在用户界面上按下返回键(R),直到回到主菜单。
在电脑上打开控制面板,并选择“网络和共享中心”。
KUKA机器人编程手册

KUKA机器人编程手册KUKA编程手册一、概述机械臂:由多个关节和连杆构成,可以在空间中进行多自由度的运动。
控制柜:包含电源模块、驱动模块、控制模块等,负责为机械臂提供电力和信号,并执行用户编写的程序。
操作面板:也称为KCP(KUKA ControlPanel),是一种手持式的触摸屏设备,可以用于控制的开关、模式切换、手动移动、程序编辑等功能。
外部设备:根据不同的应用场景,可以连接各种外部设备,如传感器、执行器、通信接口等,以实现更复杂的功能和交互。
二、学习手动移动在开始编程之前,需要先了解如何使用操作面板来手动移动。
手动移动有助于熟悉的运动范围和特性,以及检查的状态和故障。
手动移动的步骤如下:1. 打开控制柜的电源开关,并等待系统启动完成。
2.在操作面板上选择“T1”模式(也称为“测试”模式),并按下“确认”键。
3. 在操作面板上选择“手动”模式,并按下“确认”键。
4.在操作面板上选择“轴”模式或“笛卡尔”模式,并按下“确认”键。
轴模式下,可以分别控制每个关节的旋转角度;笛卡尔模式下,可以控制末端执行器的位置和姿态。
5.在操作面板上按住“死人开关”,并使用方向键或摇杆来移动。
注意观察的运动情况,避免碰撞或超出限位。
6.在操作面板上按下“停止”键,可以停止的运动,并锁定当前位置。
三、项目配置在开始编程之前,需要先配置项目的相关参数,如的IP地址、电脑和的连接方式、项目的名称和位置等。
项目配置的步骤如下:1.设置的IP地址。
在操作面板上选择“设置”菜单,并进入“网络设置”子菜单。
在此处可以查看或修改的IP地址、子网掩码、网关等信息。
一般情况下,建议将的IP地址设置为192.168.0.1,以便于与电脑进行通信。
2.电脑和通过网线连接。
将一根网线的一端插入控制柜后面的以太网接口,另一端插入电脑的网卡接口。
在电脑上设置网络连接的属性,将I P地址设置为192.168.0.2,子网掩码设置为255.255.255.0,网关设置为192.168.0.1。
kuka机器人操作与编程手册
KUKA机器人操作与编程手册简介KUKA机器人是德国KUKA机器人公司(KULG)生产的工业机器人。
它们被广泛应用于汽车制造、电子制造、建筑等各个领域。
本手册旨在为初学者提供一些关于KUKA机器人操作和编程的基础知识。
操作手册1. KUKA机器人的启动和关闭KUKA机器人的启动和关闭是使用KUKA KR C4控制器进行操作的。
下面是启动和关闭机器人的步骤:1.打开控制器电源2.使用控制器上的开关将机器人系统启动3.等待机器人系统自检完成4.通过控制器进行机器人的操作5.关闭机器人系统前,确保机器人处于安全位置6.使用控制器上的开关关闭机器人系统2. 机器人的基本移动KUKA机器人具有多种不同类型的运动,包括直线运动、旋转运动和关节运动。
下面是一些基本的机器人移动指令示例:•直线运动:LIN X100 Y100 Z100 A45 B45 C45•旋转运动:CIRC P100 P200 R50•关节运动:JNT J1=90 J2=453. 机器人编程语言KUKA机器人使用KRL(KUKA Robot Language)作为其编程语言。
KRL是一种结构化编程语言,类似于C或Pascal。
下面是一个简单的KRL程序示例:DEF myProgram()DECL int iDECL bool conditioni = 0condition = trueWHILE condition DOINC iIF i == 10 THENcondition = falseENDIFENDWHILEENDDEF4. 机器人的传感器和反馈KUKA机器人可以配备各种传感器,以便实时监测机器人的状态和周围环境的信息。
一些常见的传感器包括力传感器、视觉传感器和温度传感器。
通过这些传感器,机器人可以感知和适应外部环境的变化。
5. 机器人的安全措施在操作KUKA机器人时,安全是至关重要的。
以下是一些常见的机器人安全措施:•确保机器人周围没有障碍物•执行安全风险评估,并根据评估结果制定相应的操作计划•对机器人进行定期维护和检查,确保其正常运行•使用必要的个人防护设备,例如手套和护目镜结论本手册提供了初学者入门KUKA机器人操作和编程的基本知识。
KUKA机器人编程手册[6]
![KUKA机器人编程手册[6]](https://img.taocdn.com/s3/m/f7d5cf376d85ec3a87c24028915f804d2a16874e.png)
KUKA机器人编程手册KUKA编程手册一、KUKA基本概念1.1 什么是KUKA?KUKA是由德国库卡公司(KUKAAG)生产的一系列工业,广泛应用于汽车、航空、电子、医疗、消费品等行业的生产和制造过程中。
KUKA具有高精度、高速度、高灵活性、高可靠性等特点,能够满足各种复杂和多变的工作需求。
1.2 KUKA的组成部分机械臂:机械臂是KUKA的主体部分,由若干个关节和连杆构成,能够在空间中进行多自由度的运动。
机械臂的末端可以安装不同的工具或夹具,以适应不同的工作任务。
控制柜:控制柜是KUKA的核心部分,负责对机械臂进行电气和逻辑控制。
控制柜内部安装了操作系统、应用软件、驱动器、电源等模块,以及与外部设备通信的接口。
操作面板:操作面板是KUKA的交互部分,用于对进行设置、编程、调试和运行等操作。
操作面板上有显示屏、按键、旋钮等元件,以及与控制柜连接的数据线。
安全设备:安全设备是KUKA的保护部分,用于防止发生故障或异常情况时造成危害。
安全设备包括紧急停止按钮、安全门、安全光栅、碰撞检测等。
二、KUKA操作系统2.1 KUKA.ControlStudio2.2 KUKA.ControlStudio主要功能项目管理:项目管理模块用于创建和管理KUKA的项目文件,包括程序文件、数据文件、配置文件MODULE 模块名声明部分语句部分ENDMODULEVAR INT a;VAR REAL b;VAR BOOL c;VAR CHAR d;VAR STRING e;VAR ENUM {red, green, blue} f; VAR STRUCT {INT x; REAL y;} g; VAR ARRAY [1..10] OF INT h; VAR POINTER TO REAL i;a := 10;b := 3.14;c := TRUE;d := 'A';e := "Hello";f := red;g.x := 1;g.y := 2.0;h[1] := 100;i := ADR(b);a := a + 1;b := b * 2.0;c := NOT c;d := TO_CHAR(65);e := e + " World";f := TO_ENUM(1);g.x := g.x 1;g.y := g.y / 2.0;h[1] := h[1] * 10;i := DREF(i);PTP {X 100, Y 200, Z 300} C_PTP; -点对点运动到绝对坐标(100,200,300)LIN REL {X -50, Y -50, Z -50} C_DIS; -直线运动到相对坐标(-50,-50,-50)CIRC {KUKA编程手册一、概述KUKAControlStudio是一个基于Windows的软件平台,用于开发和执行程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
.
开放性实验项目指导书
实验项目名称六自由度KUKA机器人的编程与操作
学院(中心):现代工程训练中心
实验室名称:工程认知与文化馆1-202和1-203
指导教师:李全城
面向专业:机械、电气、计算机、自动化等
.
.
2016 年03月08日
实验:六自由度KUKA机器人的编程与操作
一、实验目的
1)了解机器人在智能制造中的作用;
2)学习KUKA机器人的简单编程及调试;
3)掌握KUKA机器人的手动和自动操作。
二、实验设备
1)六自由度KUKA机器人一台;
2)柔性制造线相关设备;
3)轴类、盘类坯料若干。
三、实验内容
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。
工业机器人的典型应用包括焊接、刷漆、组装、采集和放置(例如包装、码垛和SMT)、产品检测和测试等,所有的工作的完成都具有高效性、持久性和准确性。
工业机器人技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
给定一台机器人和相关任务要求,要求学生在教师的指导下,自己编写并调试相关机器人程序。
要求程序编写正确,且机器人可按要求安全自动地运行,最后作总结。
.
.
图1 KUKA机器人图2 柔性制造线现场布局图
四、实验步骤
1. 学习机器人的手动操作。
(1)将示教器上方黑色旋钮由竖向旋为横向。
如图3所示。
(2)选择模式中的第一个,T1模式(内部自动),如图
4所示。
图3 机器人示教器模式选择图4 机器人四种模式
(3)按下底部的伺服ON,点动控制机器人,如图5。
(4)按下方向键,移动机器人,如图
6。
图5 机器人示教器底部伺服启动按键图6 机器人示教器方向键
2. 编写并调试相关机器人程序。
3. 机器人的自动运行操作。
(1)将示教器上方黑色旋钮由竖向旋为横向。
如图3。
.
. (2)选择模式中的第三个,AUT模式(内部自动),如图4。
(3)启动程序。
(4)按下机器人启动按钮:自动状态下,按下急停按钮时,机器人停止运行。
只有复位急停
按钮,并消除报警,激活驱动装置才可重新操作运行;自动状态下,按下停止按钮时,机器人停止运行。
只有重新按下启动按钮后,机器人方可继续运行。
五、实验报告要求
1、写出机器人在工业生产中的作用。
2、写出自己所完成的机器人运动路径的程序。