翻译-A new approach for the simulation of power electronic circuits
ns方程vof方法 数值模拟
ns方程vof方法数值模拟The Navier-Stokes equations, commonly abbreviated as NS equations, are fundamental to fluid dynamics, describing the motion of viscous fluid substances. The Volume of Fluid (VOF) method, on the other hand, is a numerical technique used to simulate the interface dynamics between two or more immiscible fluids. The combination of the NS equations and the VOF method offers a powerful tool for numerically simulating fluid flows with complex interfaces.纳维-斯托克斯方程(Navier-Stokes equations,简称NS方程)是流体动力学的基础,描述了粘性流体物质的运动。
而流体体积(Volume of Fluid,简称VOF)方法则是一种数值技术,用于模拟两种或多种不相溶流体之间的界面动力学。
将NS方程与VOF方法相结合,为数值模拟具有复杂界面的流体流动提供了有力的工具。
The NS equations are a set of partial differential equations that govern the conservation of mass, momentum, and energy in a fluid. These equations, although theoretically elegant, are notoriously difficult to solve analytically for most practical problems. Therefore, numerical methods, such as the VOF method, are employed to approximate their solutions.NS方程是一组偏微分方程,支配着流体中质量、动量和能量的守恒。
模具英文翻译

Minimizing manufacturing costs for thin injectionmolded plastic componentsAbstract:Minimizing the cost of manufacturing a plastic component is very important in the highly competitive plastic injection molding industry.The current approach of R&D work focuses on optimizing the dimensions of the plastic component particularly in reducing the thickness of the component during Product design the first phase of manufacturing in order to minimize the manufacturing cost.。
This approach treats the component dimensions established in the product design phase as the given input, and uses optimization techniques to reduce the manufacturing cost of mold design and molding for producing the component.In most cases, the current approach provides the correct solution for minimizing the manufacturing cost.However, when the approach is applied to a thin component typically when miniaturizing products,it has problems finding the true minimum manufacturing cost. This paper analyses the shortcomings of the current approach for handling thin plastic components and proposes a method to overcome them.A worked example is used to illustrate the problems and compare the differences when using the current approach and the new method proposed in the paper. Keywords Miniaturization of plastic parts Minimization of manufacturing Plastic part design and manufacturing cost .NomenclatureThe thickness of gateThe thickness of the rectangular channelLatent heat offusion ofPP=130kJ/kgThe length of gate=0.5–1.3The length of circular channelThe length of rectangular channelthe consistency index1/Poisson ratio of PP=0.35Plasticmaterial constant,The volume flow rateThe volume flow rateinside the rectangular channelThe volume flow rateinside the circularchannelThe radius of the circularchannelDistance of piston movementLoading time=31536000sTime for making single cavity mold insert=15hDry cycle time=16.5sEjection time=0.009sInjection time=0.5sDemolding temperature of PP=70 CMelt temperature ofPP=190 CThe width of gateThe width of the rectangular channelthe viscosityStrain of materialsStress of materialsThermal conductivity of steel=45W/mKShear stress of plastic materialShear rate of plastic materialPressure drop of spruePressure drop of secondary runnerPressure drop of tertiary runnerPressure drop of gatePressure drop of cavityPressure drop of circular channelPressure drop of rectangular channelJ.K.L.Ho () · K.F.Chu · C.K.MokDepartment of Manufacturing Engineering & Engineering Management,City University of Hong Kong,P.R. China香港大学工程制造与管理学院E-mail: mejohnho@.hkTel.: +852-********Fax: +852-********1 IntroductionIn most industrial applications, the manufacturing cost of a plastic part is mainly governed by the amount of material used in the molding process.Thus, current approaches for plastic part design and manufacturing focus primarily on establishing the minimum part thickness to reduce material usage.The assumption is that designing the mold and molding processes to the minimum thickness requirement should lead to the minimum manufacturing cost. Nowadays, electronic products such as mobile phones and medical devices are becoming ever more complex and their sizes are continually being reduced.The demand for small and thin plastic components for miniaturization assembly has considerably increased in recent years.Other factors besides minimal material usage may also become important when manufacturing thin plastic components.In particular, for thin parts, the injection molding pressure may become significant and has to be considered in the first phase of manufacturing.Employing current design approaches for plastic parts will fail to produce the true minimum manufacturing cost in these cases.Thus, tackling thin plastic parts requires a new approach, alongside existing molddesign principles and molding techniques.1.1Current researchToday, computer-aided simulation software is essential for the design of plastic parts and molds. Such software increases the efficiency of the design process by reducing the design cost and lead time [1].Major systems, such as Mold Flow and C-Flow, use finite element analysis to simulate the filling phenomena, including flow patterns and filling sequences. Thus, the molding conditions can be predicted and validated, so that early design modifications can be achieved. Although available software is capable of analyzing the flow conditions, and the stress and the temperature distribution conditions of the component under various molding scenarios, they do not yield design parameters with minimum manufacturing cost [2,3].The output data of the software only give parameter value ranges for reference and leaves the decision making to the component designer. Several attempts have also been made to optimize the parameters in feeding [4–7], cooling [2,8,9], and ejection These attempts were based on maximizing the flow ability of molten material during the molding process by using empirical relation ships between the product and mold design parameters.Some researchers have made efforts to improve plastic part quality by Reducing the sink mark [11] and the part deformation after molding [12], analyzing the effects of wall thickness and the flow length of the part [13], and analyzing the internal structure of the plastic part design and filling materials flows of the mold design [14]. Reifschneider [15] has compared three types of mold filling simulation programs, including Part Adviser, Fusion, and Insight, with actual experimental testing. All these approaches have established methods that can save a lot of time and cost. However, they just tackled the design parameters of the plastic part and mold individually during the design stage. In addition, they did not provide the design parameters with minimum manufacturing cost.Studies applying various artificial intelligence methods and techniques have been found that mainly focus on optimization analysis of injection molding parameters [16,17]. For in-stance He et al. [3] introduced a fuzzy- neuro approach for automatic resetting of molding process parameters. By contrast , Helps et al. [18,19] adopted artificial neural networks to predict the setting of molding conditions and plastic part quality control in molding. Clearly, the development of comprehensive molding process models and computer-aided manufacturing provides a basis for realizing molding parameter optimization [3 , 16,17]. Mok et al. [20] propose a hybrid neural network and genetic algorithm approach incorporating Case-Based Reasoning (CBR) to derive initial settings for molding parameters for parts with similar design features quickly and with acceptable accuracy. Mok’s approach was based on past product processing data, and was limited to designs that are similar to previous product data. However, no real R&D effort has been found that considers minimizing manufacturing costs for thin plastic components.Generally, the current practical approach for minimizing the manufacturing cost ofplastic components is to minimize the thickness and the dimensions of the part at the product design stage, and then to calculate the costs of the mold design and molding process for the part accordingly, as shown in Fig. 1.The current approach may not be able to obtain the real minimum manufacturing cost when handling thin plastic components.1.2Manufacturing requirements for a typical thin plastic component As a test example, the typical manufacturing requirements for a thin square plastic part with a center hole, as shown in Fig. 2,are given in Table 1.Fig.1. The current practical approachFig.2. Test example of a smallplastic componentTable1. Customer requirements for the example component2 The current practical approachAs shown in Fig.1, the current approach consists of three phases: product design, mold design and molding process parameter setting. A main objective in the product design is to establish the physical dimensions of the part such as its thickness, width and length. The phases of molded sign and molding subsequently treat the established physical dimensions as given inputs to calculate the required details for mold making and molding operations.When applying the current practical approach for tackling the given example, the key variables are handled by the three phases as follows:Product design* Establish the minimum thickness (height) HP, and then calculate the material cost. HP is then treated as a predetermined input for the calculation of the costs of mold design and molding operations. HPMold design* Calculate the cooling time for the determined minimumthickness HP in order to obtain the number of mold cavities required. The mold making cost is then the sum of the costs to machine the:–Depth of cutting (thickness) HP–Number of cavities–Runner diameter DR–Gate thickness HGMolding process* Determine the injection pressure Pin, and then the cost of power consumptionDetermine the cooling time t co, and then the cost of machine operations. The overall molding cost is the sum of the power consumption cost and machine operating cost.The total manufacturing cost is the sum of the costs of plastic material, mold making and molding operations. Note that, in accordance with typical industry practice, all of the following calculations are in terms of unit costs.2.1Product designThis is the first manufacturing phase of the current practical approach. The design minimizes the thickness HP of the plastic component to meet the creep loading deflection constraint , Y (<1.47mmafter1yearofusage),and to minimize plastic material usage cost Cm. Minimizing HP requires [21]:Figure 3 plots changes in HP through Eqs.1 and 2.The graphs show that the smallest thickness that meets the 1.47mm maximum creep deflection constraint is 0 .75mm,with a plastic material cost of $0.000483558/unit and a batch size of 200000 units.This thickness will be treated as a given input for the subsequent molded sign and molding process analysis phases.2.2Mold design2.2.1 Determination of cooling timeThe desired mold temperature is 25 C. The determined thickness is 0.75mm. Figure 4 shows the cooling channels layout following standard industry practices. The cooling channel diameter is chosen to be 3mm for this example.From [22], the cooling time t co:And the location factor,BysolvingEqs.3and4, and substituting HP =0.75mm and the given values of the cooling channel design parameters, the cooling time (3.1s) is obtained.The cycle time t cycle, given by E q. 5, is proportional to the molding machine operating costs, and consists of injection time (t in), ejection time (t e j), dry cycle time (t d c), and cooling time (t c o).2.2.2 Determination of the number of mold cavities In general, the cost of mold making depends on the amount of machining work to form the required number of cores/cavities, runners, and gates. The given example calls for a two-plate moldFig.3.Deflection and plastic materials costs versus part thickness Fig.4. Cooling channel layout that does not require undercut machining. Therefore, the ma chining work for cutting the runners and gates is proportional to the work involved in forming the cores/cavities and need not be considered. In the example, mold making cost Cmm is governed by (n, HP).Generally, the minimum number of cavities, Nmin, is chosen to allow for delivery of the batch of plastic parts on time图3 。
中英文中英文文献翻译-为适应预测磨损计算模型

英文原文Case StudyTheoretical and practical aspects of the wear of vane pumpsPart A. Adaptation of a model for predictive wear calculationAbstractThe aim of this investigation is the development of a mathematical tool for predicting the wear behaviour of vane pumps uscd in the standard method for indicating the wcar charactcristics of hydraulic fluids according to ASTM D 2882/DIN 51389.The derivation of the corresponding mathematical algorithm is based on the description of the combined abrasive andadhesive wear phenomena occurring on the ring and vanes of the pump by the shear energy hypothesis, in connection withstochastic modelling of the contacting rough surfaces as two-dimensional isotropic random fields. Starting from a comprehensive analysis of the decisive ring-vane tribo contact, which supplies essential input data for the wear calculation, the computational method is adapted to the concrete geometrical, motional and loading conditions of thetribo system vane pump and extended by inclusion of partial elastohydrodynamic lubrication in the mathematical modej.For comparison of the calculated wear behaviour with expenmental results, a test series on a rig described in Part B was carried out. A mineral oil-based lubricant without any additives was used to exclude the influence of additives which cannot be described in the mathematical model. A good qualitative correspondence between calculation and experiment regarding the temporal wear progress and the amount of calculated wear mass was achieved.Keywords: Mathematical modelling; Simulation of wear mechanisms; Wear testing devices; Hydraulic vane pumps; Elastohydrodynamic lubrication;Surface roughness1. IntroductionIn this study, the preliminary results of a newmethodological approach to the development of tribo- meters for complicated tribo sysLems are presented. The basic concept involves the derivation of a mathematical algofithm for wear calculation in an interactive process with experiments, which can be used model of the tribo system to be simulated. In this way, an additional design tool to achieve the correlation of the wear rates of the model and original system is created.The investigations are performed for the Vickers vane pump V104 C usedin the standard method forindicating the wear characteristics of hydraulic fluids according to ASTM D 2882/DIN 51 389. In a first step, a mathematical theory based on the description of abrasive and adhesive wear phenomena by the shear energy hypothesis, and including stochastic modelling of the contacting rough surfaces, is adapted to the tribological reality of the vane pump, extended byaspects of partial elastohydrodynamic lubrication and verified by corresponding experiments.Part A of this study is devoted to the mathematical modelling of the wear behaviour of the vane pump and to the verification of the resulting algorithm; experimental wear investigations represent the focal point of Part B, and these are compared with the results of the computational method derived in Part A.2. Analysis of the tribo contactThe Vickers vane pump V 104 C is constructed as a pump for constant volume flow per revolution. The system pressure is led to the bottom side of the 12 vanes in the rotor slots to seal the cells formed by each pair of vanes, the ring, the rotor and the bushings in the tribologically interesting line contact of the vane and inner curvature of the ring (Fig. 1). Simultaneously, all other vane sides are stressed with different and periodically alternating pressures of the fiuid. A comprehensive structure and stress analysis based on quasistatic modelling of all inertial forces acting on the pump, and considering the inner curvature of the ring, the swivel motion of the vanes in relation to the tangent of curvature and the loading assumptions, is described in Refs. [1-3]. Thereby, a characteristic graph for the contact force Fe as a function of the turn angle can be obtained, which depends on the geometry of the vanes used in each run and the system pressure. From this, the inner curvature of the ring can be divided into four zones of different loading conditions in vane-ring tribo contact (Fig. 2), which is in good agreement with the wear measurements on the rings: in the area of maximum contact force (zone n), the highest linear wear could be found [2,3] (see also PartB).3. Mathematical modelling3.1. Basic relations for wear calculationThe vane and ring show combined abrasive and adhesive wear phenomena (Fig. 3). The basic concepts of the theory for the predictive calculation of such wear phenomena are described in Refs. [4-6].Starting from the assumption that wear is caused by shear effects in the surface regions of contacting bodies in relative motion, the fundamental equation(1)for the linear wear intensity Ih in the stationary wear state can be derived, which contains the specific shear energy density es/ro, interpretable as a material constant, and the real areaArs of the asperity contacts undergoing shear. To determine this real contact area, the de- scription of the contacting rough surfaces as two-dimensional isotropic gaussian fields according to Ref.[7] is included in the modelling. Thus the implicit functional relationwith the weight function(2)is found, which can be used to calculate the surface ratio in Eq. (1) for unlubricated contacts from the hertzian pressure Pa acting in the investigated tribo contact by a complicated iterative process described in Refs. [6,8]. The concrete structure of the functions Fand c depends on the relative motion of the contacting bodies (sliding, rolling). The parameter a- (m0m4)/m22represents the properties of the rough surface by its spectral moments, which can be deter- mined statistically from surface profilometry, and the plasticity index妒= (mOm4)y4(E'/H) is a measure of the ratio of elastic and plastic microcontacts.3.2. Extension to lubricated contactsThe algorithm resulting from the basic relations for wear calculation was applied successfully to unlubricated tribo systems [8]. The first concepts for involving lubrication in the mathematical model are developed in Ref. [8]. They are based on the application of the classical theory of elastohydrodynamic lubrication (EHL) to the microcontacts of the asperities, neglecting the fact that there is also a "macrolubrication film" which separates the contacting bodies and is interrupted in the case of partial lubrication by the asperity microcontacts. Therefore their use for calculating practical wear problems leads to unsatisfactory results [9]. They are extended here by including the following assump- tions in the mathematical model.(1) Lubrication causes the separation of contacting bodies by a macrofilm with a mean thickness u. which can be expressed in terms of the surfaceroughness by [10](3)Where u0 is the mean film thinkness according to classical EHL theory between two ideally smooth bodies, which can be determined for line contact of the vane and ring by[11](2) In the case of partial lubrication, the macrofilm is interrupted during asperity contacts. A plastic microcontact is interpreted as a pure solid state contact, whereas for an elastic contact theroughness is superimposed by a microlubrication film. Because of the modelling of the asperities as spherical indenters, the microfilm thickness can be determined using the EHL theory for sphere-plane contacts, which is represented in the random model by the sliding number [8](5)(3) The hertzian pressure acting in the macrocontact works in two parts: as a hydrodynamic pressure pEH borne by the macrolubrication film and as a pressure pFK borne by the roughness in solid body contact.(4) For pure solid state contacts, it is assumed that the limit for the mean real pressure prFK which an asperity can resist without plastic deformation can be estimated by one-fifth to one-sixth of its hardness(6)Investigations on the contact stiffness in Ref. [11] have led to the conclusion that the elastic properties of the lubrication film cause a relief of the asperities, which means that the real pressure working on the asperity is damped. Therefore, in the mathematical model for lubricated tribo systems, an additional term fffin, which corrects the upper limit of the real pressure as a function of the film thickness, is introduced p,EH =prFK[1 -fcorr(U)] (7)This formula can be used to determine a modified plasticity index {PEH for lubricated contacts according to Ref. [8].Altogether, the basic model for wear calculation can be extended for lubricated tribo systems by replacing relation (2) by(8)(3)3.3. Adaptation to the tribo’system vane pumpTo apply the mathematical model for wear calculation to a concrete tribo system, all material data (specific material and fluid properties, roughness parameters) used by the algorithm must be determined (see Part B). Moreover, the model must be adapted to the mechanical conditions of the wear process investigated. On the one hand, this is related to the relative motion of the bodies in tribo contact, which influences the concrete structure of function f in formulae (2) and (8). In the case of vane-ring contact, sliding with superimposed rolling due to the swivel motion of the vanes was modelled(9)A detailed derivation of the corresponding formulae for fsliding and f.olling can be found in Refs.[8,9].On the other hand, the hertzian presstire Pa acting on tribo contact during the wear process has an esseritial importance in the wear calculation. For the tribo system vane pump, the mean contact force Fe in each loading zone can be regarded as constant, whereas the hertzianpressure decreases with time. The reason for this is the wear debris on the vane, which causes a change 'n the vane tip shape with time,leading to an increased contact radius and, accordingly, a larger contact areaTo describe this phenomenon by the mathematical wear model, the volume removal Wvl of one vane in terms of the respective contact radius Ri(t) at time t and the sliding distance SR(Rl(t》is given by(10)where the constants a and b can be determined by regression from the geometrical data of the tested vanes. The corresponding sliding distance necessary to reach a certain radius Ri due to vane wear can be expressed using the basic equation (1):(11)Thus, applying Eq. (11) together with Eq. (10) to the relation(12)it is possible to derive the following differential equation for the respective volume removal Wvll of the ring, which can be solved by a numerical procedure(13)The required wear intensities of the vane and ring can be calculated by Eq. (8) as a function of the contact radius from the hertzian pressures working in each loading zone, which are available from the contact force by the well-known hertzian formulae.3.4 Possibilities of verificationIf all input data are available for a concrete vane pump run (the concrete geometrical, material and mechanical conditions in the cartridge used and the specific fluid properties, see Part B), the mathematical model for the calculation of the wear of vane pumps derived above can describe quantitatively the following relations.(1) The sliding distance SR(RI) and, if the number of revolutions of the pump and the size of the inner ring surface are known, the respective run time t of the pump which is necessary to reach a certain shape of the vane tips due to wear.(2) The volume removal W,.:uri(t) and the wear masses WmW(t) of the vane and ring as a function of the run time t.(3) The mean local linear wear Wl(t) in every loading zone on the ring at time t.Thus an immediate comparison between the calculated and experimentally established wear behaviour, with regard to the wear progress in time, the local wear progress on the ring and the wear masses at a certain time t, becomes possible.4。
simulation翻译
simulation翻译simulation翻译为模拟。
用法:模拟是指使用计算机程序或其他工具来模仿真实世界的过程或事件,以便研究或预测其行为和结果。
它在许多领域都有广泛的应用,包括科学、工程、经济、医学等。
双语例句:1. The engineers are using simulation to test the durability of the new bridge design.工程师们正在使用模拟来测试新的桥梁设计的耐久性。
2. The flight simulator provides a realistic simulation of flying an aircraft.飞行模拟器提供了一个真实的飞行体验。
3. The computer simulation of weather patterns can help meteorologists predict future weather conditions.气象模式的计算机模拟可以帮助气象学家预测未来的天气情况。
4. The virtual reality simulation allows surgeons to practice complex procedures before performing them on real patients.虚拟现实模拟允许外科医生在操作真实患者之前练习复杂的手术程序。
5. The simulation of traffic flow helps urban planners analyze and improve transportation systems.交通流模拟可以帮助城市规划者分析和改进交通系统。
6. The simulation of chemical reactions in a lab can save time and resources compared to conducting physical experiments.与进行物理实验相比,实验室化学反应的模拟可以节省时间和资源。
科技英语翻译

Unit1课文A人机对话1. 几十年来,科幻小说作家一直在勾勒一个世界,在这个世界中语言交流是人机之间最常用的联系接口。
科幻作家之所以这样想,部分原因是因为人类非常渴望让计算机能像人类一样地行为举止。
但事实远非如此简单。
人类的言语行为是自然形成的——在人类知道该如何读、写之前, 就学会了说。
人类的语言也是高效的——大多数人的说话速度大约是其打字的五倍多,是其写字的十倍多。
而且言语具有相当大的灵活性——人类不必靠或看见任何物体就能进行对话。
2. 第一代以语言为基础的接口装置很快就要面世, 包括能认识数万字的高性能系统。
事实上,现在在很多电脑商店里就能买到语音识别软件用来录音口授。
这些产品主要由IBM公司、飞利浦公司和其它公司提供。
其它的系统能够识别打电话中随口而出的言语。
美国电话电报公司的贝尔实验室率先在电话交易中使用语音识别系统。
目前这一流行技术主要应用在一些虚拟助手的服务中,可使用户得到新闻、得到最新的股票报价,甚至能够通过电话听电子邮件。
3. 我相信第二代以言语为基础的接口装置将能使人机交流达到像人与人交流一样。
因此,对话的理念非常重要。
传统的语音识别技术(把声音信号转换成数字信号)必须得到“语言理解”软件的补充、支持。
这样计算机才能掌握话语的意义。
4.从电脑的输出方面来看,计算机必须会用言辞来表达。
在万维网上得到文件、找到合适的信息然后将它变成合理的句子。
通过这样一系列过程,电脑和用户能够进行对话。
从而使它搞清楚它可能已经犯的错误。
举例来说, 通过提问下面的问题让计算机意识其中的错误:“你是说麻萨诸塞州的波士顿市,还是德克萨斯州的奥斯汀”?“银河系”说话了5.在过去十年里,我们在麻省理工学院的计算机科学实验室里,一直从事这种对话接口系统的研究。
但不幸地是,到目前为止,我们所开发的计算机的智商仍很低,它们只能处理有限的知识领域,如应用在天气预测和飞机的航班时刻表上。
尽管如此,但这些信息是即时更新的,你可通过电话得到这些信息。
虚拟现实与医疗教学外文翻译中英文2019

沉浸式虚拟现实与医疗教学中英文2019英文Medical Student Perspectives on the Use of Immersive Virtual Reality forClinical Assessment TrainingMatthew Zackoff, Francis Real,Bradley Cruse,David Davis,Melissa KleinWhat's New?Medical students reported an immersive virtual reality (VR) curriculum on respiratory distress as clinically accurate and likely to impact future patient assessment. VR training was rated as equally or more effective than high-fidelity mannequins and standardized patients but less effective than bedside teaching.Keywords:Clinical assessment,respiratory distress,virtual reality BackgroundThe practice of medicine has traditionally relied on an apprenticeship model for clinical training – an approach in which bedside teaching was the primary source for knowledge transfer. However, the frequency of bedside teaching is declining due to duty hour restrictions, increased patient turnover, and competing demands for physicians' time.Alternatives to bedside teaching have emerged including simulation-based medical education though current approaches arelimited in applicability to and functionality for pediatric training. For instance, standardized patients are not available for many pediatric conditions especially for diseases that predominantly affect infants. Moreover, patient simulators often cannot display critical physical exam findings for discriminating between sick and healthy patients (eg mental status, work of breathing, perfusion changes).An emerging educational modality, immersive virtual reality (VR), could potentially fill this gap. Immersive VR utilizes a three-dimensional, computer generated environment in which users interact with graphical characters (avatars). While screen-based simulation training has been demonstrated to enhance learning outcomes, immersive VR has the potential to have a broader impact through increased learner engagement, and improved spatial representation and learning contextualization. To date, this technology has demonstrated effectiveness in communication skills training; however, it has not been investigated for clinical assessment training. To evaluate the role of immersive VR in medical student clinical assessment training, we created a VR curriculum focused on respiratory distress in infants. Our pilot study explored medical student attitudes toward VR and perceptions of VR compared to other common medical educational methods.Educational Approach and InnovationSetting and Study PopulationAn IRB approved prospective pilot study was conducted at Cincinnati Children's Hospital Medical Center, a large academic children's hospital, during the 2017 to 2018 academic year. A randomized sample of third-year medical students, based upon predetermined clinical team assignment during their pediatric rotation, was invited to participate in a VR curriculum.Curriculum DesignThe curricular goal, to improve third year medical students' ability to appropriately categorize a pediatric patient's respiratory status, aligns with an Association of American Medical Colleges Core Entrustable Professional Activity for entering residency, the ability to recognize a patient that requires an urgent or emergent escalation of care.To address this goal, an immersive VR curriculum using the clinical scenario of an admitted infant with bronchiolitis was developed collaboratively between clinicians, educators, and simulation developers.A virtual Cincinnati Children's Hospital Medical Center inpatient hospital room was created using the Unity development platform and was experienced through an Oculus Rift headset. The environment included a vital signs monitor, virtual stethoscope, and avatars for the patient and preceptor. The patient avatar could demonstrate key exam findings (ie mental status, work of breathing, and breath sounds) that correlated with three clinical scenarios: 1) no distress, 2) respiratory distress, and 3)impending respiratory failure. The displayed vital signs and auscultatory findings matched the clinical status of the patient. Learners received feedback on their performance immediately following each simulated case. The preceptor avatar, controlled by a physician facilitator (M.Z., F.R.), guided the student through the VR simulation. Learners were expected to recognize and interpret the vital signs, physical exam, and auscultatory findings and come to an overall assessment of the patient's respiratory status. Detailed algorithms correlating learner input to avatar responses allowed for standardization of the avatar preceptor prompts. For example, if a student did not comment on the patient's lung sounds, the facilitator is guided to select the avatar prompt, “What do you think of his lung sounds?” Facilitator-provided feedback for each scenario was standardized to ensure consistent learner experiences.Scenarios were piloted on four critical care attending physicians, two hospitalists, two general pediatricians, four critical care fellows, four senior pediatric residents, and four medical students to assess the accuracy of the findings portrayed in the clinical scenarios as well as the feasibility of the planned facilitation. Iterative changes were made to the VR simulation based upon feedback.Survey Design and ImplementationImmediately following the VR curriculum, students completed a survey to assess immersion within the VR environment using questionsderived from a validated instrument.15 Demographic data and attitudes toward the VR curriculum including its perceived effectiveness compared to other education methods were assessed on a 5-point Likert scale via a survey created de novo with piloting prior to use. Survey results were analyzed with binomial testing.ResultsAll eligible students consented to participate in the research study (n = 78). Ages ranged from 20 to 39 with an equal distribution between male and female. Students self-identified as White (51.3%), Asian (28.2%), Black (7.7%), Hispanic/Latino (3.9%), or other (9.0%). Most students reported a strong sense of presence in the VR environment (85%) and the vast majority noted that the scenarios captured their attention and senses (96% and 91%, respectively).A majority of students agreed or strongly agreed that that the simulations were clinically accurate (97.4%), reinforced key learning objectives (100%), and would impact future care provision (98.7%). In addition, students reported VR training as more effective (P < .001) than reading, didactic teaching, online learning, and low fidelity mannequins. VR training was rated as equally or more effective (P < .001) than high fidelity mannequins and standardized patients. The only modality that VR was rated less effective than was bedside teaching.Figure. Binomial testing demonstrates that a statistical majority of students found virtual reality training more effective than reading, didactic teaching, online learning, and low fidelity mannequins, and equally or more effective than high fidelity mannequins and standardized patients.Discussion and Next StepsThis study represents a novel application of immersive VR for medical student training. The majority of student participants reported a sense of presence within the VR environment and identified the modality as equal or superior in perceived effectiveness to other training options such as standardized patients and high-fidelity mannequin simulations while rated less effective than bedside teaching. These findings are consistent with the findings of Real et al13 that learners perceived VR as equally effective to standardized patients for communication training. Our learners expressed similar perceptions regarding the use of VR forclinical assessment training –expanding the potential applications forVR-based education.The assessment of a patient's respiratory status, and importantly the recognition of need for emergent escalation of care is a core clinical competency that directly relates to patient safety. The ability of immersive VR to convey specific critical exam findings could aid in accelerating junior learners' competence related to identification of impending respiratory failure and potentially impact future care provision. The learnings from this pilot could be applied to other clinical scenarios (eg sepsis) given immersive VR's ability to accurately simulate key exam findings.This study has several limitations. First, it was conducted at a single site with only third year medical students. Second, the evaluation focused on students' perceptions toward the effectiveness of VR-based education in general rather than specifically focusing on VR-based education on pediatric respiratory distress. Though we could not standardize students' exposure to the comparison education modalities, all students underwent a high-fidelity simulation focused on respiratory distress as part of their pediatric rotation. This high fidelity simulation occurred prior to the VR curriculum, and thus represented a consistent reference for all of the students who completed the study survey.A final significant consideration for this study is the generalizability of the approach. With each passing year and iteration of availableequipment, the cost of VR compatible headsets and computers continue to fall. We utilized the Oculus Rift headset and a VR capable computer, which together cost on the order of $2000. The development platform, Unity, is an open source platform available at no cost. We are fortunate to have VR developers as employees of our simulation center, facilitating the development of new scenarios, and represent a resource that may currently be unavailable at many other institutions.Next steps include establishing response process validity through assessment of learner application of knowledge gained during the VR curriculum. Additional research goals include exploring the effectiveness of immersive VR at additional sites to assess generalizability, directly comparing VR head-to-head with other educational modalities (eg standardized patients, high-fidelity simulations), and evaluating change in actual clinical practice as well as the costs associated with these modalities to explore the feasibility of broader implementation of VR training. The findings from this pilot study suggest that immersive VR may be an effective supplement to bedside teaching due to its ability to accurately represent real-life environments and clinical scenarios in a standardized format that is safe for learners and patients.中文使用沉浸式虚拟现实进行医学临床培训的研究什么是新的?医学院的学生报告说,关于呼吸窘迫的沉浸式虚拟现实(VR)课程在临床上是准确且有效的,并且可能会影响未来的患者救治效果。
绉戞妧鑻辫鍐欎綔楂樼骇鏁欑▼(绗簩鐗

改错练习1冠词1. The UASMA protocol employs a unique frame structure.(UASMA协议采用了独特的帧结构)2. Finally, a broad stepped impedance transformer is designed by this method.(最后,用这种方法设计了宽带阶梯阻抗变换器)3. Dynamic analysis and evaluation of the security of a proactive secret sharing system(先应秘密共享系统安全性的动态分析和评估)4. The approach can be applied to the one-dimensional potential barrier with an arbitrary profile.(该方法适用于任意形状的一维势垒)5. We propose a (kind of) numerical method based on (the)Newton’s iterative method.(我们提出了一种基于牛顿地带发的数值方法)练习2连接词数词1. This object is over five times heavier than that one is.(这个物体比那个物体重4倍多)2. Unless otherwise stated, it is assumed that silicon transistors are used and that ICBO can be neglected.(除非另有说明,我们假设使用的是硅管、ICBO可以忽略不计)3. This circuit has the advantage s of simple structure and easy (to) adjust ment.(这个电路的优点是结构简单、容易调整)4. Fig s. 1, 2, and 3 show this process in detail.(图1、2、3详细地画出了这个过程)5. For further information(s), consult references[3, 5, 9].(对于进一步信息,参见文献[3]、[5]、[9])练习3介词1. This paper presents a new method for the recognition (method) of radar target s.(本文提出了雷达目标的一种新的识别方法)2. The influence of the moving state of the target on (is very strong for) the tracking accuracy of the EKF is great.(目标的运动状态对EKF的跟踪精度影响是非常大的)3. Another comsat was launched on the morning of the 8th of October.(在10月8日早上又发射了一颗通信卫星)4. V oltage is measured in volt s.(电压时用伏特来度量的)5. They will leave for Beijing to attend an international conference on mobile communication.(他们将赴北京参加移动通信国际会议)练习4动词/副词/形容词1. In this case, the input does not fall; nor [neither] does the output (,too). […; the output does not fall, either.](在这种情况下。
测绘工程专业英语翻译(中文版)

Song et al. / J g) 2014 15(1):68-82
69
and hardware resource, especially, time, is called for. In recent years, with the development of methods allowing for the accurate calibration of non-metric cameras and the increasingly reliable automation of the process, photogrammetry is becoming accessible to a wide user base (Butler et al., 2001; Chandler et al., 2002; Lohry and Zhang, 2012; Feng et al., 2013; Zwick et al., 2013). Using an online structure-from-motion (SfM) program, Fonstad et al. (2013) created high-resolution digital elevation models of a river environment from ordinary photographs produced from a workflow that takes advantage of free and open source software. Bouratsis et al. (2013) used a pair of commercial cameras to record the evolution of the bed, and a computational approach that consisted of a set of computer-vision and image-processing algorithms was employed to analyze the videos and reconstruct the instantaneous 3D surface of the bed. James and Robson (2012) integrated SfM and multiview-stereo (MVS) algorithms to study topographic measurements in a method requiring little expertise and enabling automated processing. Astruc et al. (2012) studied a stereoscopic technique to measure sand-bed elevation in the swash zone at the wave time-scale. This method is non-intrusive, leading to an accuracy of height estimation of the order of a sand grain size whilst temporal resolution allows the wave cycle to be captured. In addition, Lu et al. (2008) made some related research about thematic mapper imagery of plain and highland terrains. Image data are simply 2D. However, many clues might be found in single images or multiple images through 3D reconstruction of the image scene. Typical reconstruction methods under sunlight conditions include the shape from shading method (Zhang et al., 1999), the shape from texture method (Forsyth and Ponce, 2002), and the manual interaction method (Shashua, 1997). There are also some methods based on multiple images, such as the stereo vision method, the motion image sequence method, and the photometric stereo method (Li, 1991; Zhang Y.J., 2000; Pollefeys and Gool, 2002). It is also worth noting that the 3D reconstruction application is widespread as well as the topographic survey. There are some significant applications in other fields. Gomez et al. (2013) carried out a new method for reconstructing a 3D+t velocity field from multiple 3D+t color Doppler
毕业论文外文翻译--虚拟现实技术的发展过程及研究现状(适用于毕业论文外文翻译+中英文对照)

虚拟现实技术的发展过程及研究现状虚拟现实技术是近年来发展最快的技术之一,它与多媒体技术、网络技术并称为三大前景最好的计算机技术。
与其他高新技术一样,客观需求是虚拟现实技术发展的动力。
近年来,在仿真建模、计算机设计、可视化计算、遥控机器人等领域,提出了一个共同的需求,即建立一个比现有计算机系统更为直观的输入输出系统,成为能与各种船感器相联、更为友好的人机界面、人能沉浸其中、超越其上、进出自如、交互作用的多维化信息环境。
VR技术是人工智能、计算机图形学、人机接口技术、多媒体技术、网络技术、并行计算技术等多种技术的集成。
它是一种有效的模拟人在自然环境中视听、动等行为的高级人机交互技术。
虚拟现实(Virtual Reality ):是一种最有效的模拟人在自然环境中视、听、动等行为的高级人机交互技术,是综合计算机图形技术、多媒体技术、并行实时计算技术、人工智能、仿真技术等多种学科而发展起来的20世纪90年代计算机领域的最新技术。
VR以模拟方式为使用者创造一个实时反映实体对象变化与相互作用的三维图像世界,在视、听、触、嗅等感知行为的逼真体验中,使参与者可直接探索虚拟对象在所处环境中的作用和变化;仿佛置身于虚拟的现实世界中,产生沉浸感(immersive)、想象(imaginative和实现交互性interactive) 。
VR技术的每一步都是围绕这三个特征而前进的。
这三个特征为沉浸特征、交互特征和构想特征。
这三个重要特征用以区别相邻近的技术,如多媒体技术、计算机可视化技术沉浸特征,即在VR提供的虚拟世界中,使用户能感觉到是真实的进入了一个客观世界;交互特征,要求用户能用人类熟悉的方式对虚拟环境中的实体进行观察和操纵;构想特征:即“从定性和定量综合集成环境中得到感性和理性的认识:从而化概念和萌发新意”。
1.VR技术发展的三个阶段VR技术的发展大致可分为三个阶段:20世纪50年代至70年代VR技术的准备阶段;80年代初80年代中期,是VR 技术系统化、开始走出实验室进入实际应用的阶段;80年代末至90年代初,是VR技术迅猛发展的阶段。
论文翻译

学号:200710050109HEBEI UNITED UNIVERSITY毕业论文翻译(汉译英)论文题目:基于ANSYS升降台低速轴有限元分析学生姓名:张雪飞专业班级: 07数学1班学院:理学院指导教师:常锦才2011 年 6 月 5 日ContentAbstract (1)Introduction (2)Chapter 1 Finite Element Method (3)Section1 FEM (3)Section2 Basic Principles and Mathematical Concepts (4)Chapter 2 Pro-E Modeling (7)Section1 Modeling of the Low-speed Shaft (7)Section2 Features and Benefits of Pro-E (7)Chapter 3 ANSYS Implementation Process (9)Section1 Software Solution (9)Section2 Static Analysis (10)Section3 Modal Analysis (13)Conclusion (15)Thanks (16)References (17)AbstractThe field of engineering technology is currently used in numerical simulation methods are: the finite element method, the boundary element method and finite difference method, etc., but the breadth of its usefulness and application, the main or the finite element method as a discretization numerical method, finite element method in structural analysis of the first application, and then in other areas has been widely used. The basic idea of the finite element method is to place objects into a finite number of discrete and interconnected by a certain way combination unit, to simulate or approximate the original object, thus a continuous problem is reduced to no degrees of freedom the freedom of the limited discrete A numerical degree of problem solving analysis. Discrete objects, through its analysis of each unit to unit, and ultimately get the whole object of the analysis. Meshing of each small block called the unit. Determine cell shape, cell connection point between the called node. Unit node to node, the internal force at the force, external load for the node.ANSYS finite element package is a multi-purpose finite element method for computer design program that can be used to solve the structure, fluid, electricity, electromagnetic fields and collision problems. Reflected in the engineering advantages of the finite element method.Packaging production line with copper low-speed shaft of hydraulic lifts for the study, using three-dimensional software, Pro / E to establish three-dimensional model, the three-dimensional model into ANSYS finite element model of the low-speed shaft linear static analysis and modal analysis, analysis of shaft deformation and stress distribution, and find out the maximum deformation and stress positions, proposed improvement program axis to improve design reliability.Keywords: finite element method ANSYS Low-speed shaft Pro/E Modal analysisIntroductionElasticity of non-bar structure of the object, such as plate, shell, solid structure, the geometric characteristics of these structures is its thickness is much smaller than the length and width, or length, width and thickness of the same size of the three scales order of magnitude. When the finite element method for the analysis of elasticity problems, it is called the elasticity problem with finite element method, or simply the finite element method. Elasticity analysis can be divided into analytical and numerical methods into two categories, can be expressed as⎪⎩⎪⎨⎧⎩⎨⎧FEM N F —— model discrete the of solution umerical method difference inite equations al differenti of solution numerical the method Numberical methodAnalyticalChapter 1 Finite Element MethodSection1 FEMFinite element method is a high performance, the commonly used method. Finite element method in the early basis of variational principle is developed, it is widely used in the Laplace equation and Poisson equation describes the various physical fields (the type field and the extremal problem of functional closely linked). Since 1969, some scholars in the application of fluid balance method in the weighted Galerkin method (Galerkin) or least square method to obtain the same finite element equation, which can be used in the finite element method described in any differential various types of physical field, while the physical field and no longer require such functional extremal problems have been linked.For the finite element method, the problem-solving steps can be summarized as:1.Establishment of integral equations, or equations based on variational principle and the right margin of the principle of orthogonal functions, the establishment of initial boundary value problem with differential equations is equivalent to the integral expression, which is the starting point of the finite element method.2.Regional unit subdivision, according to shape and to solve practical problems in the region of the physical characteristics of the regional split into a number of interconnected, non-overlapping units. Regional units is the finite element method of preparatory work, this part of the relatively large amount of work, in addition to computing elements and node numbers and to determine the relationship between each other, should also be said that the location of the node coordinates, but also need to be listed a natural boundary and the number and nature of the boundary nodes the corresponding boundary value.3.Determining unit basis function, according to the number of nodes and elements in the accuracy of the approximate solution requirements, choose to meet certain conditions, the interpolation function as the interpolation basis function units. Finite element method in the base function is selected in the unit, because each unit has a regular geometric shape, the base function is selected to follow certain rules.4.Unit Analysis: Solution of the functions of each unit by unit basis function approximation of a linear combination of expressions; then substituted into the integral equation approximation function, and the integral unit area, obtained with undetermined coefficients (that is, each node unit parameter values) of the algebraic equations, called the unit finite element equation.5.Overall synthesis: the finite element equations in the unit after the draw, all the cells in the region according to certain laws of the finite element equation for accumulation, the formation of the general finite element equation.6.Boundary conditions: There are three general forms of boundary conditions, into the essential boundary conditions (Dirichlet boundary conditions), the natural boundary conditions (Riemann boundary conditions), mixed boundary conditions (Cauchy boundary condition). The natural boundary conditions, generally in the integral expression can be automatically met. The essential boundary conditions and mixed boundary conditions, adjustment shall be the general rule on the amendment to satisfy the finite element equations.7.Solution of finite element equation: According to the modified boundary condition overall finite element equations is the unknown quantity to be determined with all the closed equations, numerical methods using the appropriate solution, can be obtained function value of each node.Section2 Basic Principles and Mathematical ConceptsIn the engineering field, although most issues have been the basic equations and boundary conditions, but not analytical solution. So the introduction of simplifying assumptions, the problem in the reduced state obtained under the approximate solution, due to the complexity of the problem, which often leads to the approximate solution error is too large or even wrong conclusions. The finite element law is another way to retain the complexity of the problem, obtained by numerical calculation the approximate numerical solution of the problem.Finite element method the beginning of a continuum with a finite number of (but is a lot of) coordinates or degrees of freedom to approximate (but is the system) to bedescribed. Of the structure can be a discrete number of structural units, these units are only a finite number of nodes in each hinge end. Each unit suffered physical and surface forces are known by the principle of static displace the equivalent to the node, a node load. Usually calculated by the displacement method, taking an unknown node as the basic unknown displacement components. In order to obtain the node can be obtained after the stress of displacement, stress and unit must be established node displacement relationship, the stress transformation matrix [S] expression.Firstly, the geometric equations of elasticity to write unit strain and the relationship between node displacement matrix, said the strain matrix [B],{}[]{}e e B δε= (1)Then the material constitutive (that is, the physical equations) to obtain element elastic matrix [D], which launched with the expression node displacement element stress :{}[]{}[][]{}[]{}e e e e S B D D δδεσ=== (2)Note :[S] = [D][B]。
智能车辆中英文对照外文翻译文献

中英文对照外文翻译文献(文档含英文原文和中文翻译)原文:Intelligent vehicle is a use of computer, sensor, information, communication, navigation, artificial intelligence and automatic control technology to realize the environment awareness, planning decision and automatic drive of high and new technology. It in aspects such as military, civil and scientific research has received application, to solve the traffic safety provides a new way.With the rapid development of automobile industry, the research about the car is becoming more and more attention by people. Contest of national competition and the province of electronic intelligent car almostevery time this aspect of the topic, the national various universities are also attaches great importance to research on the topic, many countries have put the electronic design competition as a strategic means of innovative education. Electronic design involving multiple disciplines, machinery and electronics, sensor technology, automatic control technology, artificial intelligent control, computer and communication technology, etc., is a high-tech in the field of many. Electronic design technology, it is a national high-tech instance is one of the most important standard, its research significance is greatThe design though just a demo model, but is full of scientific and practical. First we according to the complex situation of road traffic, in accordance with the appropriate author to make a road model, including bend, straight and pavement set obstacles, etc. On curved and straight, the car along the orbit free exercise, when the small car meet obstacles, pulse modulation infrared sensors to detect the signal sent to the microcontroller, a corresponding control signal according to the program MCU control cars automatically avoid obstacles, to carry on the back, forward, turn left, turn rightSubject partsIntelligent vehicle is a concentration of environment awareness, planning decision, multi-scale auxiliary driving, and other functions in an integrated system, is an important part of intelligent transportation system.In military, civilian, space exploration and other fields has a broad application prospect. The design of smart car control system are studied, based on path planning is a process of the intelligent car control system2.1 theory is put forwardThe progress of science and technology of intelligent led products, but also accelerated the pace of development, MCU application scope of its application is increasingly wide, has gone far beyond the field of computer science. Small to toys, credit CARDS, big to the space shuttle, robots, from data acquisition, remote control and fuzzy control, intelligent systems with the human daily life, everywhere is dependent on the single chip microcomputer, this design is a typical application of single chip microcomputer. This design by implementing the driverless car, on the tests, by the reaction of the single chip microcomputer to control the car, make its become intelligent, automatic forward, turn and stop function, after continuing the perfection of this system also can be applied to road testing, security patrol, can meet the needs of society.In design, the use of the sensors to detect road surface condition, sensor central sea are faint and adopts a comparing amplifier amplification, and the signal input to the controller, the controlled end using stepper motor, because of the step motor is controlled electrical pulse, as long as the output from the controller to satisfy stepper motor merits of fixed control word. In operation of stepping motor and a drivingcircuit, it also to join a drive circuit in the circuit, each function module is different to the requirement of power supply current, the power supply part set up conversion circuit, so as to meet the needs of the various parts. After comparison choice element, design the circuit principle diagram and the circuit board, and do the debugging of hardware, system software and hardware is often the combination of organic whole. Software, on the use of the 51 single-chip timer interrupt to control pavement test interval and the car movement and speed. Due to take that road is simple, it is using more traditional assembly language for programming. For the correctness of the program design, using a commonly used keil c51 simulation software simulation validation, the last is integrated debugging of software and hardware, and prove the correctness and feasibility of the design scheme.2.2 electronic intelligent car design requirements(1) electric vehicles can be able to according to the course to run all the way; (2) electric vehicles can store and display the number of detected metal and sheet metal to the starting line in the distance; (3) are accurately electric cars after exercising all the way to the display of the electric vehicle the entire exercise time; (4) electric cars can't collisions with obstacles in the process of exercise.2.3 the general conception of computer network teaching websiteUsing 89 c51 as the car's control unit, sensor eight-way from outside,in the front of the car, as a black belt in the process of the car into the garage detecting element, at the rear end of the car when connected to eight-channel infrared sensors as the car pulled out of the garage of a black belt in detecting element, the LJ18A3-8 - Z/BX inductive proximity switch as garage iron detecting element, the microcontroller after receiving sensor detects the signal through the corresponding procedures to control the car forward, backward, turn, so that the car's performance indicators meet the requirements of the design.Intelligent car is a branch of intelligent vehicle research. It with the wheel as mobile mechanism, to realize the autonomous driving, so we call it the smart car. Smart car with the basic characteristics of the robot, easy to programming. It with remote control car the difference is that the latter requires the operator to control the steering, start-stop and in a more advanced remote control car can also control the speed (common model car belong to this type of remote control car); The smart car Is to be implemented by computer programming for the car stop, driving direction and speed control, without human intervention. Operator the smart car can be changed by a computer program or some data to change its drive type. This change can be controlled through programming, the characteristics of the car driving way is the biggest characteristic of smart car. The control system of smart car research purpose is to make the car driving with higher autonomy. If any given car a path, through the system,the car can get system for path after image processing of data moving and Angle (a), and can be scheduled path, according to the displacement and Angle information.The control system structure analysisAccording to the above design idea, the structure of the intelligent car control system can be divided into two layers1, the planning layerPC control system, the planning layer provides the information of the whole car driving, including path processing module and communication module. It has to solve the basic problem(1) using what tools to deal with the car path graph;(2) the car movement model is established, the data to calculate the car driving;(3) set up the car's motion model, the data to calculate the car driving;Layer 2, behaviorLower machine control system, the behavior is the underlying structure of a smart car control system, realize the real-time control of the car driving, it includes communication module, motor control module and data acquisition module. It to solve the basic problems are:(1) receiving, processing, PC sends data information;(2) the design of stepping motor control system;(3) information collection and the displacement and Angle of the car, car positioning posture, analysis system control error;The total design schemeSmart car control system are obtained by system structure, order process:(1) start AutoCAD, create or select a closed curve as the cart path, pick up the car starting $path graph(2) to choose the path of the graphics processing, make the car turning exist outside the minimum turning radius of edges and corners with circular arc transition(3) to generate a new path to simulate the motion process of car;(4) to calculate the displacement of the car driving need and wheel Angle, and then sends the data to the machine(5) under the machine after receiving data, through software programming control the rotation speed and Angle of the car wheels and make it according to the predetermined path A complete control system requirements closely linked to each function module in the system, according to the order process and the relationship between them, the total design scheme of the system is available.Design of basically has the following several modulesPart 1, the information acquisition module, data collection is composed of photoelectric detection and operation amplifier module,photoelectric detection were tracing test and speed test of two parts. To detect the signal after budget amplifier module lm324 amplifier plastic to single chip, its core part is several photoelectric sensor.2, control processing module: control processing module is a stc89c52 MCU as the core, the microcontroller will be collected from the information after the judgement, in accordance with a predetermined algorithm processing, and the handling results to the motor drive and a liquid crystal display module, makes the corresponding action.3, perform module: executable module consists of liquid crystal display (LCD), motor drive and motor, buzzer of three parts. LCD is mainly based on the results of single chip real-time display, convenient and timely users understand the current state of the system, motor driver based on single chip microcomputer instruction for two motor movements, can according to need to make the corresponding acceleration, deceleration, turning, parking and other movements, in order to achieve the desired purpose. Buzzer is mainly according to the requirements in a particular position to make a response to the report.译文一、引言智能车辆是一个运用计算机、传感、信息、通信、导航、人工智能及自动控制等技术来实现环境感知、规划决策和自动行驶为一体的高新技术综合体。
flow3d单词翻译
Vvect刚体初速度的矢量Delete source bitmap files--删除原位图文件Frame rate--帧速率A VI capture--动画捕捉A VI filename--动画文件名FLOW-3D (R) --FLOW-3D 简体中文版Interface version --接口版本Solver version--求解器版本Number of Processors--处理器数量Total Physical Memory (RAM) --物理内存总数(RAM) f3dtknux_license_file--授权许可文件Host Name--主机名F3D_VERSION --软件版本Operating System--操作系统Type--类型Porous--孔隙Porosity --孔隙率Lost foam--消失模Standard--标准Thermal conductivity--导热率Material name--材料名称Custom--自定义Surface area multiplier--面积倍增Unit system--系统单位Solid properties --固体属性Initial conditions--初始化条件Surface properties--表面属性Solids database--固体数据库Surface roughness--表面粗糙度Temperature--温度Temperature variables--温度变化Saturation temperature --饱和温度Units=CGS --单位=公制Solutal expansion coefficient --溶质膨胀系数Ratio of solute diffusion coefficient ---比溶质扩散系数Surface tension --表面张力Gas constant--气体常量Thermal conductivity --导热率Surface tension coeff--表面张力系数Critical solid fraction--关键凝固比率Solidus temperature--固相线温度Phase change--相变Material name --材料名称Thermal properties --热性质Custom --自定义Constant thinning rate--不断变薄率Units=SI -单位=国际单位制Partition coefficient--分隔系数Dielectric constant --介电常数Specific heat --比热Eutectic temperature --低共熔温度Coherent solid fraction --凝固Thermal expansion --热膨胀Unit System --系统单位Units=custom --单位=自定义Units=slugs --单位=斯勒格Reference temperature--起始温度Latent heat of vaporization--汽化潜热Reference solute concentration--参考溶质浓度Pure solvent melting temperature --熔点温度Liquidus temperature--液相温度Viscosity --黏度Solidification--凝固Vapor specific heat --蒸气比热Density--密度Temperature sensitivity--温度敏感性Saturation pressure --饱和压力Temperature shift --温度变化Compressibility --可压缩性Contact angle --接触角度Latent heat of fusion (fluid 1) --熔解潜热(流体1)New fluid database --新流体数据库Accommodation coefficient --调节系数Strain dependent thinning rate --应变黏度系数Constant thickening rate --不断增厚率added to materials database --添加到材料库cannot be added. --不能被添加Record already exists in materials database--在材料库已经存在该记录. New saved in materials database--新保存到材料库中.Could not find material DB--没有发现材料数据Add--添加Close--关闭Add Mesh Points --添加网点Direction --方向New Point --新的点Mesh Block --网格块2-D advanced options --2-D 高级选项Option--选项Add --添加Type--类型Component--组Cancel--取消Browse --浏览Source --来源File name--文件名Advanced --高级Numerics--数值运算Advanced options--高级选项sigma --表面张力系数Air entrainment --卷气Activate air entrainment model --激活卷气模型Surface tension coefficient --表面张力系数Dialog--对话框Remove mesh constrains--清除网格限制Size of all cells --全部单元尺寸Total Cells--单元总数Baffle options --隔板选项Baffle index --主隔板Baffle color--隔板颜色Hide selected baffles --隐藏选中的隔板Use contour color--使用轮廓颜色Selection method--择伐作业Boundary type --边界类型Specified pressure --规定压力Grid overlay --网格重叠Specified velocity --指定速度Electric potential--电位Stagnation pressure --滞止压力V olume flow rate --体积流量Z flow direction vector--Z 流向Y flow direction vector --Y 流向X flow direction vector--X 流向Electric charge--电荷Mesh Block--网格块Add to component --添加为元件Specific heat --比热Simulate--仿真Stop preprocessor--停止预处理Block distribution--块分配Porous--孔隙Component --组Scalars--标量Add to component --添加为元件Cell size --单元尺寸Render space dimensions --渲染面积Cell size is empty--单元尺寸为空Create mesh block (Cylindrical) --创建网格块(柱状) Total number of cells --单元数量Cylinder subcomponent --子气缸Add to component--添加为元件Radius --半径Setting the default workspace location is required. You can change the location at any time from the Preferences menu.--需要设置本地默认工作区位置.你可以随时通过菜单来改变位置。
设计指南电容式触摸传感器英文翻译
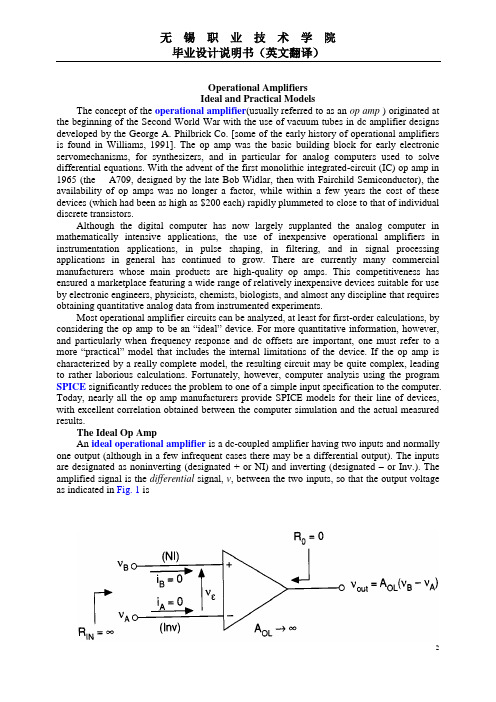
Operational AmplifiersIdeal and Practical ModelsThe concept of the operational amplifier(usually referred to as an op amp ) originated at the beginning of the Second World War with the use of vacuum tubes in dc amplifier designs developed by the George A. Philbrick Co. [some of the early history of operational amplifiers is found in Williams, 1991]. The op amp was the basic building block for early electronic servomechanisms, for synthesizers, and in particular for analog computers used to solve differential equations. With the advent of the first monolithic integrated-circuit (IC) op amp in 1965 (the A709, designed by the late Bob Widlar, then with Fairchild Semiconductor), the availability of op amps was no longer a factor, while within a few years the cost of these devices (which had been as high as $200 each) rapidly plummeted to close to that of individual discrete transistors.Although the digital computer has now largely supplanted the analog computer in mathematically intensive applications, the use of inexpensive operational amplifiers in instrumentation applications, in pulse shaping, in filtering, and in signal processing applications in general has continued to grow. There are currently many commercial manufacturers whose main products are high-quality op amps. This competitiveness has ensured a marketplace featuring a wide range of relatively inexpensive devices suitable for use by electronic engineers, physicists, chemists, biologists, and almost any discipline that requires obtaining quantitative analog data from instrumented experiments.Most operational amplifier circuits can be analyzed, at least for first-order calculations, by considering the op amp to be an “ideal” device. For more quantitative information, however, and particularly when frequency response and dc offsets are important, one must refer to a more “practical” model that includes the internal limitations of the device. If the op amp is characterized by a really complete model, the resulting circuit may be quite complex, leading to rather laborious calculations. Fortunately, however, computer analysis using the program SPICE significantly reduces the problem to one of a simple input specification to the computer. Today, nearly all the op amp manufacturers provide SPICE models for their line of devices, with excellent correlation obtained between the computer simulation and the actual measured results.The Ideal Op AmpAn ideal operational amplifier is a dc-coupled amplifier having two inputs and normally one output (although in a few infrequent cases there may be a differential output). The inputs are designated as noninverting (designated + or NI) and inverting (designated – or Inv.). The amplified signal is the differential signal, v, between the two inputs, so that the output voltage as indicated in Fig. 1 isFIGURE 1 Configuration for an ideal op amp.The general characteristics of an ideal op amp can be summarized as follows:1. The open-loop gain AOL is infinite. Or, since the output signal vout is finite,then the differential input signal v must approach zero.2. The input resistance RIN is infinite, while the output resistance R O is zero.3. The amplifier has zero current at the input ( i A and i B in Fig. 1 are zero), but the op amp can either sink or source an infinite current at the output.4. The op amp is not sensitive to a common signal on both inputs (i.e., v A= v B); thus, the output voltage change due to a common input signal will be zero. This common signal is referred to as a commonmode signal, and manufa cturers specify this effect by an op amp’s common-mode rejection ratio (CMRR), which relates the ratio of the open-loop gain ( A OL) of the op amp to the common-mode gain (A CM ). Hence, for an ideal op amp CMRR =∞.5. A somewhat analogous specification to the CMRR is the power-supply rejection ratio (PSRR),which relates the ratio of a power supply voltage change to an equivalent input voltage change produced by the change in the power supply. Because an ideal op amp can operate with any power supply, without restriction, then for the ideal device PSRR =∞.6. The gain of the op amp is not a function of frequency. This implies an infinite bandwidth.Although the foregoing requirements for an ideal op amp appear to be impossible to achieve practically, modern devices can quite closely approximate many of these conditions. An op amp with a field-effect transistor (FET) on the input would certainly not have zero input current and infinite input resistance, but a current of <10 pA and an R IN= 10 12Ωi s obtainable and is a reasonable approximation to the ideal conditions. Further, although a CMRR and PSRR of infinity are not possible, there are several commercial op amps available with values of 140 dB (i.e., a ratio of 107). Open-loop gains of several precision op amps now have reached values of >107 , although certainly not infinity. The two most difficult ideal conditions to approach are the ability to handle large output currents and the requirement of a gain independence with frequency.Using the ideal model conditions it is quite simple to evaluate the two basic op amp circuit configurations, (1) the inverting amplifier and (2) the noninverting amplifier, as designated in Fig. 2.For the ideal inverting amplifier, since the open-loop gain is infinite and since the output voltage v o is finite, then the input differential voltage (often referred to as the error signal ) v must approach zero, or the input current isThe feedback current i F must equal i I, and the output voltage must then be due to the voltage drop across RF , orFIGURE 2 Illustration of (a) the inverting amplifier and (b) the noninverting amplifier.The inverting connection thus has a voltage gain vo/vi of-RF/RI, an input resistance seen by vI of R1 ohms [from Eq. (27.2)], and an output resistance of 0 . By a similar analysis for the noninverting circuit of Fig. 2(b), since v is zero, then signal vI must appear across resistor R1 , producing a current of vI/R1, which must flow through resistor RF . Hence the output voltage is the sum of the voltage drops acrossRF and R1 , or As opposed to the inverting connection, the input resistance seen by the source v I is now equal to an infinite resistance, since R IN for the ideal op amp is infinite.Practical Op AmpsA nonideal op amp is characterized not only by finite open-loop gain, input and outputresistance, finite currents, and frequency bandwidths, but also by various nonidealities due to the construction of the op amp circuit or external connections. A complete model for a practical op amp is illustrated in Fig. 3.FIGURE 3 A model for a practical op amp illustrating nonideal effects.The nonideal effects of the PSRR and CMRR are represented by the input series voltage sources of V supply/PSRR and V CM/CMRR, where V supply would be any total change of the two power supply voltages, V +dc and V–dc , from their nominal values, while V CM is the voltage common to both inputs of the op amp. The open-loop gain of the op amp is no longer infinite but is modeled by a network of the output impedance Z out (which may be merely a resistor but could also be a series R-L network) in series with a source A ( s ), which includes all the open-loop poles and zeroes of the op amp aswhere A OL is the finite dc open-loop gain, while poles are at frequencies p1, p2, . . . and zeroes are at Z1, etc. The differential input resistance is Z IN , which is typically a resistance RIN parallel with a capacitor C IN. Similarly, the common-mode input impedance Z CM isestablished by placing an impedance 2Z CM in parallel with each input terminal. Normally, Z CMis best represented by a parallel resistance and capacitance of 2R CM (which is >> RIN) and C CM/2. The dc bias currents at the input are represented by I B+ and I B–current sources that would equal the input base currents if a differential bipolar transistor were used as the input stage of the op amp, or the input gate currents if FETs were used. The fact that the two transistors of the input stage of the op amp may not be perfectly balanced is represented by an equivalent input offset voltage source, VOS , in series with the input.The smallest signal that can be amplified is always limited by the inherent random noise internal to the op amp itself. In Fig. 3 the noise effects are represented by an equivalent input voltage source (ENV), which when multiplied by the gain of the op amp would equal the total output noise present if the inputs to the op ilar fashion, if the inputs to the op amp were open circuited, the total output noise would equal the sum of the noise due to the equivalent input current sources (ENI+ and ENI–), each multiplied by their respective current gain to the output. Because noise is a random variable, this summation must be accomplished in a squared fashion, i.e.,Typically, the correlation (C) between the ENV and ENI sources is low, so the assumption of C 0 can be made. For the basic circuits of Fig. 27.2(a) or (b), if the signal source vI is shorted then the output voltage due to the nonideal effects would be (using the model of Fig. 3)provided that the loop gain (also called loop transmission in many texts) is related by the inequalityInherent in Eq. (27.8) is the usual condition that R1 << Z IN and Z CM. If a resistor R2 were in series with the noninverting input terminal, then a corresponding term must be added to the right hand side of Eq. (27.7) of value –I B+R2 (R1 + R F)/R1.On manufacturers’ data sheets the individual values of I B+ and I B– are not stated; instead the average input bias current and offset current are specified asThe output noise effects can be obtained using the model of Fig. 3 along with the circuits of Fig.2 aswhere it is assumed that a resistor R2 is also in series with the noninverting input of either Fig. 2(a) or (b). The thermal noise (often called Johnson or Nyquist noise) due to the resistors R1 , R2 , and RF is given by (in rms volt2/Hz)where k is Boltzmann’s constant and T is absolute temperature ( Kelvin). To obtain the total output noise, one must multiply the E2 out expression of Eq. (27.10) by the noise bandwidth of the circuit, which typically is equal to /2 times the –3 dB signal bandwidth, for a single-pole response system [Kennedy, 1988].SPICE Computer ModelsThe use of op amps can be considerably simplified by computer-aided analysis using the program SPICE. SPICE originated with the University of California, Berkeley, in 1975 [Nagel, 1975], although more recent user-friendly commercial versions are now available such as HSPICE, HPSPICE, IS-SPICE, PSPICE, and ZSPICE, to mention few of those most widely used. A simple macromodel for a near-ideal op amp could be simply stated with the SPICE subcircuit file (* indicates a comment that is not processed by the file).SUBCKT IDEALOA 1 2 3*A near-ideal op amp: (1) is noninv, (2) is inv, and (3) is output.RIN 1 2 1E12E1 (3, 0) (1, 2) 1E8.ENDS IDEALOA (27.12)The circuit model for IDEALOA would appear as in Fig. 4(a). A more complete model, but not including nonideal offset effects, could be constructed for the 741 op amp as the subcircuit file OA741, shown in Fig. 4(b)..SUBCKT OA741 1 2 6*A linear model for the 741 op amp: (1) is noninv, (2) is inv, and*(6) is output. RIN = 2MEG, AOL = 200,000, ROUT = 75 ohm,*Dominant open - loop pole at 5 Hz, gain - bandwidth product*is 1 MHz.RIN 1 2 2MEGE1 (3, 0) (1, 2) 2E5R1 3 4 100KC1 4 0 0.318UF ; R1 2 C1 = 5HZPOLEE2 (5, 0) (4, 0) 1.0ROUT 5 6 75.ENDS OA741 (27.13)The most widely used op amp macromodel that includes dc offset effects is the Boyle model [Boyle et al., 1974]. Most op amp manufacturers use this model, usually with additions to add more poles (and perhaps zeroes). The various resistor and capacitor values, as well as transistor, and current and voltage generator, values are intimately related to the specifications of the op amp, as shown earlier in the nonideal model of Fig. 3. The appropriate equations are too involved to list here; instead, the interested reader is referred to the article by Boyle in the listed references. The Boyle model does not accurately model noise effects, nor does it fully model PSRR and CMRR effects.A more circuits-oriented approach to modeling op amps can be obtained if the input transistors are removed and a model formed by using passive components along with both fixed and dependent voltage and current sources.This model not only includes all the basic nonideal effects of the op amp, allowing for multiple poles and zeroes, but can also accurately include ENV and ENI noise effects.The circuits-approach macromodel can also be easily adapted to current-feedback op amp designs, whose input impedance at the noninverting input is much greater than that at the inverting input [see Williams, 1991]. The interested reader is referred to the text edited by J. Williams, listed in the references, as well as the SPICE modeling book by Connelly and Choi [1992].运算放大器理想及实际模型运算放大器(通常称之为op amp)的概念起源于第二次世界大战开始时,乔治•a •菲尔公司对真空管直流放大器应用的发展〔一些运放的早期历史于1991年在威廉姆斯被发现〕。
叶轮机械非定常流动及气动弹性计算
中图分类号:V211.3 论文编号:1028701 18-B061 学科分类号:080103博士学位论文叶轮机械非定常流动及气动弹性计算研究生姓名周迪学科、专业流体力学研究方向气动弹性力学指导教师陆志良教授南京航空航天大学研究生院航空宇航学院二О一八年十月Nanjing University of Aeronautics and AstronauticsThe Graduate SchoolCollege of Aerospace EngineeringNumerical investigations of unsteady aerodynamics and aeroelasticity ofturbomachinesA Thesis inFluid MechanicsbyZhou DiAdvised byProf. Lu ZhiliangSubmitted in Partial Fulfillmentof the Requirementsfor the Degree ofDoctor of PhilosophyOctober, 2018南京航空航天大学博士学位论文摘要气动弹性问题是影响叶轮机械特别是航空发动机性能和安全的一个重要因素。
作为一个交叉学科,叶轮机械气动弹性力学涉及与叶片变形和振动相关联的定常/非定常流动特性、颤振机理以及各种气弹现象的数学模型等的研究。
本文基于计算流体力学(CFD)技术自主建立了一个适用于叶轮机械定常/非定常流动、静气动弹性和颤振问题的综合计算分析平台,并针对多种气动弹性问题进行了数值模拟研究。
主要研究内容和学术贡献如下:由于叶轮机械气动弹性与内流空气动力特性密切相关,真实模拟其内部流场是研究的重点之一。
基于数值求解旋转坐标系下的雷诺平均N–S(RANS)方程,首先构造了适合于旋转机械流动的CFD模拟方法。
特别的,针对叶片振动引起的非定常流动问题,采用动网格方法进行模拟,通过一种高效的RBF–TFI方法实现网格动态变形;针对动静叶排干扰引起的非定常流动问题,采用一种叶片约化模拟方法,通过一种基于通量形式的交界面参数传递方法实现转静子通道之间流场信息的交换。
某公司新员工培训管理手册英文版

Practical operation training
By simulating actual work scenarios, conducting practical operations and team collaboration training, we aim to cultivate the practical skills and teamwork spirit of new employees.
03
Training methods and approaches
Use of online learning management systems (LMS) to provide courses, videos, and materials for self-study
E-learning Platforms
Job related training
The training should be closely aligned with the job requirements and responsibilities of the new employees
Flexibility
The training program should be flexible, allowing for individong new employees
The company lies in a continuous learning approach, providing opportunities for employees to develop their skills and knowledge through their employment
Blending different methods resources active participation and enhancement retention of information
人工智能英语翻译
人工智能英语翻译Artificial Intelligence (AI) refers to the simulation of human intelligence in machines that are programmed to think and learn like humans. It involves the development of computer systems that can perform tasks that usually require human intelligence, such as visual perception, speech recognition, decision-making, and language translation.AI has been a topic of interest and research for many years. With advancements in technology, AI has become more sophisticated and capable of performing complex tasks. It has the potential to revolutionize various industries, including healthcare, finance, transportation, and manufacturing.One key application of AI is in healthcare. AI algorithms can analyze large amounts of medical data and identify patterns or make predictions. This can help doctors in diagnosing diseases accurately and prescribing appropriate treatments. AI can also assist in the development of new drugs by analyzing molecular structures and predicting their efficacy.In finance, AI can analyze market data and make predictions on stock prices or suggest investment strategies. It can also detect fraudulent activities in real-time, helping prevent financial losses. AI-powered chatbots have also been introduced in the industry to provide customer support and answer queries promptly.AI has also made significant contributions in the transportation sector. Autonomous vehicles, powered by AI, have the potential to reduce accidents, improve traffic flow, and provide more efficienttransportation solutions. AI algorithms can analyze real-time data from sensors and make decisions accordingly, ensuring safe and smooth driving.Manufacturing is another industry benefiting from AI. Machines equipped with AI can perform repetitive tasks with high precision and accuracy, leading to increased productivity and reduced human errors. AI-enabled robots can also work collaboratively with humans, enhancing the overall efficiency of manufacturing processes.Despite the numerous advantages of AI, there are also concerns about its potential negative impacts. Some worry about the loss of jobs as AI systems replace human workers in various industries. There are also ethical concerns regarding the use of AI in decision-making, as biases inherent in the algorithms can lead to unfair outcomes.In conclusion, AI is a rapidly evolving field that has the potential to transform various industries and improve the quality of human life. From healthcare to finance, transportation to manufacturing, the applications of AI are vast and promising. However, it is essential to address the ethical and social implications associated with AI to ensure its responsible and beneficial use.。
PDA灌装翻译英中对照1

PDAPROCESS SIMULATION TESTING FORASEPTICALLY FILLED PRODUCTSPDA无菌产品模拟灌装工艺试验PDAASEPTIC PROCESSING MONOGRAPH REVISION TASK FORCEPDA无菌工艺技术专论修订版专题组September 19961996年9月James P. Agalloco. Agalloco&Associates (Co-chair)James E. Akers,Ph.D.,Akers Kennedy & Associates, Inc.Doris L. Conrad,SmithKline Beecham(Co-choir) &Upjohn,IncWilliam R. Frieben,Ph.D.,PharmaciaEdmund M.Fry,PDACarol mpe,Baxter Healthcare CorporationRussell E.Madsen,PDAWilliam R.McCullers, Merck & pany,Inc.TerryE.Munson,Kemper-Masterson,Inc.Ronald F.Tetzlaff,Ph.D.,Kemper-Masterson,Inc.James D. Wilson,Isomedix,Znc.PREFACE前言This document replaces the previous PDA technical documents on the validation of aseptic processing: Technical Monograph No. 2, Validation of Aseptic Filling for Solution Drug Products, 1980; and Technical Report No. 6, Validation of Aseptic drug Powder Filling Processes, 1984. Our intent in this effort was to update these documents and expand the coverage to other dosage forms, as well as embrace the changing nature of aseptic processing technology within the global industry. We have attempted to address the subject as fully as possible, recognizing the notable contributions by other organizations, regulators, pendia and individuals who have worked in this area.这期文件取代了以前关于无菌工艺验证方面的PDA科技文件:1980年第2期科技专论-可溶性药物产品的无菌灌装验证;1984年第6期科技报告-无菌药物粉末分装工艺验证。
人工智能的发展前景英语翻译

人工智能的发展前景英语翻译The Development Prospects of Artificial IntelligenceIn recent years, the advancement of technology has propelled the rapid development of artificial intelligence. Artificial intelligence, or AI, refers to the simulation of human intelligence processes by machines, especially computer systems. This technology has the potential to revolutionize various aspects of our lives and society as a whole.One of the key areas where artificial intelligence is making significant strides is in the field of healthcare. AI-powered healthcare systems are being used to analyze medical data, assist in diagnostics, and even perform surgeries with great precision. This has the potential to improve patient outcomes, reduce medical errors, and lower healthcare costs in the long run.Another promising application of artificial intelligence is in the field of transportation. Self-driving cars, powered by AI algorithms, are becoming a reality and have the potential to revolutionize the way we commute. These vehicles are designed to be safer, more efficient, and environmentally friendly compared to traditional vehicles. In addition, AI can also optimize traffic flow and reduce congestion in urban areas.The impact of artificial intelligence is not limited to specific industries but is poised to transform many aspects of our daily lives. For instance, AI-powered personal assistants can help us with various tasks, from scheduling appointments to managing our finances. Virtual reality and augmented reality applications, driven by AI algorithms, are creating immersive experiences in gaming, education, and entertainment.Despite the numerous benefits that artificial intelligence can bring, there are also concerns about its potential risks and ethical implications. Issues such as data privacy, algorithmic bias, and job displacement are areas that require careful consideration and regulation as AI technology continues to advance.In conclusion, the development prospects of artificial intelligence are indeed promising, with the potential to revolutionize various industries and improve our quality of life. However, it is essential for us to approach this technology with caution and ensure that it is used responsibly and ethically. As we navigate the future of AI, it is crucial to strike a balance between innovation and regulation to harness its full potential for the benefit of society.。
2024体育新课程标准:探索和实践的五种教学方法英文版

2024体育新课程标准:探索和实践的五种教学方法英文版2024 Sports New Curriculum Standards: Exploring and Implementing Five Teaching MethodsIn the ever-evolving landscape of sports education, the 2024 Sports New Curriculum Standards aim to revolutionize the way we approach teaching and learning in the field. One of the key components of these standards is the emphasis on incorporating a variety of teaching methods to cater to different learning styles and enhance overall student engagement.1. Interactive Workshops: These hands-on sessions allow students to actively participate in learning activities, fostering a deeper understanding of key sports concepts and techniques. By immersing themselves in practical exercises, students can apply theoretical knowledge in real-world scenarios, enhancing their overall learning experience.2. Collaborative Projects: Encouraging teamwork and collaboration, collaborative projects provide students with the opportunity to work together towards a common goal. By working in groups, students can leverage each other's strengths and skills, leading to a more comprehensive and enriched learning process.3. Simulation Exercises: Through simulated scenarios and role-playing activities, students can gain practical experience in handling challenging situations commonly encountered in the sports industry. These exercises help students develop critical thinking skills and problem-solving abilities, preparing them for real-world challenges they may face in their future careers.4. Field Trips and Outdoor Activities: By taking learning outside the classroom, field trips and outdoor activities offer students a hands-on experience in various sports environments. Whether visiting sports facilities, attending live sporting events, or engaging in outdoor sports activities, students can gain a holistic perspective on the sports industry while staying physically active and connected to nature.5. Technology Integration: Leveraging the latest technological advancements, such as virtual reality simulations, online learning platforms, and sports analytics tools, can enhance the teaching and learning experience. By incorporating technology into the curriculum, students can access interactive learning resources, analyze performance data, and stay up-to-date with industry trends, preparing them for a technologically-driven sports landscape.In conclusion, the 2024 Sports New Curriculum Standards advocate for a dynamic and multifaceted approach to teaching sports. By exploring and implementing these five teaching methods, educators can create a stimulating and engaging learning environment that nurtures students' passion for sports and equips them with the necessary skills and knowledge to succeed in the industry.。
桥梁专业外文翻译--- 一种新的方式,通过和半透过拱桥设计吊带

桥梁专业外文翻译--- 一种新的方式,通过和半透过拱桥设计吊带中英文对译英文原文A new way to design suspenders for through and half-through arch bridgesR.J. Jillian, Y.Y. Chen, Q.M. Wu, W.M. Gaia and D.M. Penpusher Municipal Design & Research Institute, Sazhen, China1ABSTRACTIt is well-known that, in through and half-through arch bridges, the suspenders are important components since they connect the bridge deck to the arch ribs. The collapse of bridge deck or arch ribs may be induced once one or more suspenders are broken. In this paper,the traditional design way of the suspenders in through and half-through arch bridges is discussed first. Based on the discussion, a new way to design suspenders for arch bridges is then put forward. The reasonability of this new way is proved by numerical analysis examples. The impact effect of the remaining components of the arch bridge due to the breakage of one or more suspenders is obtained by appropriate simulation using the comprehensive commercial software ANSYS. It can be concluded from the analysis in this paper that the new way to design the suspenders for the through and half-through arch bridges can assure the safety of the bridge effectively even though one or more suspenders happen to break.2 INTRODUCTIONWith the rapid development of new materials and construction technologies, the modern arch bridges are now entering a new era. The span length of the modern arch bridges is increasing,and the first two longest modern arch bridges are the Enchainment Yangtze River Bridge and the Lu Pu bridge, respectively. The Enchainment Yangtze River Bridge built in 2008 is a tied steel truss arch bridge with a span length of 552m; and the Lu Pu Bridge built in 2003 is a steel box arch bridge with a central span length of 550m. They are both half-through arch bridges and respectively located in Chongqing and Shanghai,China.Arch bridges can be classified into three categories according to the relative positions between the deck and the arch: deck-arch bridge, half-through arch bridge and through arch bridge (Ch-eng J. et al. 2003). For both half-through arch bridge and through arch bridge, the suspenders are the important components since they connect the bridge deck with arch ribs and transfer kinds of loads from bridge deck to arches, and finally to foundation. However, at the same time they are the vulnerable members to be damaged or ruined, because they usually work both in formidable natural environment and under fatigue-induced cycling loads (Li D.S.et al. 2007). It is a fact that the service life of the suspender is much shorter than that of the arch bridge, and the suspenders must be replaced timely (Tang H.C. 2005).The damage to the bridge deck or arches may be induced when one or more suspenders break, sometimes, even the collapse of the arch bridge may happen. In recent years, the accidents of arch bridges’collapse caused severe casualties and huge economic loss (Li D.S.and Ou J.P. 2005 ). In order to know well about the health condition of suspenders, kinds of realtime monitoring and diagnoses were conducted (Li D.S. et al. 2007). However, both the technologies and the materials for structural health monitoring and diagnose are not fully developed up to now (Li H.N. et al. 2008).In this paper, the traditional design way of suspenders in through and half-through arch bridges is discussed first. Based on the discussion, a new way to design the suspenders in through and half-through modern arch bridges is then put forward. With the application of this new way, the arch bridge will remain safe even though one or more suspenders happen to break.This new design way is a different method from the health monitoring to control the safety of the modern arch bridges under the condition that the break of the suspender is uncontrollable.The reasonability and reliability of this new way is studied and proved by a numerical analysis example based on a real through arch bridge. The impact effect of the remaining components of the arch bridge due to the breakage of one or more suspenders is obtained by appropriate simulation using the comprehensive commercial software ANSYS. It can be concluded from the analysis in this paper that the new way to design the suspenders in modern arch bridges can assure the safety of the bridge effectively even though one or more suspend ers happen to break.3 DISCCUSION ON TRADITONAL DESIGN OF ARCHBRIDGE SUSPENDERSFor through-type and half-through-type arch bridges, the suspenders are anchored to arch ribs atone end and transverse beams at the other. Generally speaking, in the traditional arch bridge design the double-suspender anchorage (Fig.1) instead of the single-suspender anchorage is widely adopted in order to keep the arch bridge still safe and make the replacement of the suspenders more convenient when one suspender happens to break.Figure 1 : Double-suspender anchorage traditionally designed: (a) Parallel double-suspender anchorage,(b) Inclined double-suspender anchorage However, the two suspenders at the same anchorage are usually designed as the same both in material and cross sections; i.e.,, E1=E2, A1=A2and θ1=θ2, where E, A and θare the elastic modulus, cross section area and inclined angles of the suspender, respectively. That means they have the same or similar stress and variation of stress in service. They are also under the same or similar corrosion environment since they are located at the same anchorage. Hereby, it can be concluded that the two suspenders at the same anchorage will fail at the same or similar time because of the almost equal level of both fatigue load and corrosion environment.Based on the discussion above, it can be seen that the double-suspender system designed in the traditional way will not improve both the safety of the arch bridge and the convenience of suspenders replacement compared to the single-suspender system.4 A NEW WAY TO DESIGN ARCH BRIDGE SUSPENDERSIn order to keep the remaining structure of arch bridge still safe when one suspender happens to break, the double-suspenders must be designed withdifferent service life. The only way to achieve this aim is to design the two suspenders at the same anchorage with different either material or cross section areas since they carry the same fatigue loads and are under the same corrosion environment.If the two suspenders at the same anchorage are designed with different materials, the extra in convenience both in design and construction of the arch bridge will be induced. The better way is to make the two suspenders with different cross section areas A Fand AS(Fig.2)respectively. With different cross section areas, the two suspenders at the same anchorage will have different stress levels and variation of stresses, that is to say, there are σF,max≠σS,max, σF,a≠σF,a. Σmax and σa are the maximum stress and amplitude of the stress of the suspenders,respectively. Based on the basic theories of the material fatigue, the material or member has different service lives with different maximum stress and stress amplitude.Figure 2 : Double-suspender anchorage designed in new way : (a) Parallel double-suspender anchorage,(b) Inclined double-suspender anchorage Thereupon, the two suspenders at the same anchorage may have different service lives if they are appropriately designed with different cross section areas even though they are made of the same material and under the same fatigue loads and corrosion environment. During the service life of the arch bridge, the suspender with the larger cross section will still keep the arch bridge safe when the suspender with the smaller cross section at the same anchorage happens to break.The reasonability and reliability of this new way to consider the suspender design will be proved by numerical comparison study on a trough-type modern arch bridge, Sazhen North Railway Station Bridge, using comprehensive commercial software ANSYS in the following section in this paper.5 NUMERICAL ANALYSIS EXAMPLE5.1 Description of Sazhen North Railway Station BridgeSazhen North Railway Station Bridge with a span length of 150m is a through-type modern concrete-filled steel tubular arch bridge. It was built in 2000 and located at the Sazhen North Railway Station, spanning all railways at that station. Rise-to-span ratio of this bridge is 1/4.5.The elevation view of the bridge is shown in Fig.3. The width of the general bridge deck is23.5m except at the end of the arch ribs with a bridge deck width of 28m. Horizontal cables in the steel box girders of the bridge deck are adopted to balance the horizontal force of the arch ribs. This bridge has two vertical arch ribs and each arch rib is composed of four concrete-filled steel tubes and thus has a truss cross section of 2.0m in width and 3.0m in height. The material properties of the bridge are listed in Table 1. The more details about this bridge is found in Li eta. (2002).5.2 Finite element model of the example bridgeA detailed finite element model (Fig.4) of the example bridge was developed using the comprehensive commercial software ANSYS. In this 3 dimensional (3D) finite element model,every component is appropriately modeled.As mentioned above, each arch rib is composed of four concrete-filled steel tubes. These concrete-filled steel tubes are modeled by BEAM4 element. Since the concrete-filled steel tube is a composite member, the equivalent cross sectional properties and material properties are obtained first by editing an APDL file based on some equivalence rules, and then assign these equivalent cross sectional properties and material properties to the corresponding beam elements. The equivalent cross sectional properties and material properties of the concrete-filled steel tubes are listed in Table 2.The BEAM4 element is also adopted to model the arch rib bracings, the longitudinal steel box girders, the steel tubes connecting the four concrete-filled steel tubes of the arch rib. The transverse steel girders of the bridge deck are model-led using BEAM188 element. The concrete plates on the top of the bridge deck are modeled as beam-grid using BEAM4 element. The suspenders are modeled by the LINK8 element. The cross section properties of these components except those of the transverse girders are listed in Table 3, BEAM188 element needs the cross section shape and dimensions as input information, the corresponding cross section properties will be calculated automatically by the program ANSYS. The connections between the longitudinal box girders and transverse girders, the concrete plates and the steel girders are all regarded as rigid and modeled by MPC184 elements. There are 4672 elements and 2448 nodes in total in this 3D finite element model.The boundary conditions of the 3D finite element model are also considered appropriately based on the real situation of the bridge structure. In Sazhen North Railway StationBridge,the arches are fixed rigidly to the piers. The horizontal cables in the steel box girders of the bridge deck are adopted to balance the horizontal force at the fixed point connecting arch rib sand piers. Since the piers are not considered in this 3D finite element model, the ends of the arch ribs should be treated as fixed in all degrees of freedom, and the horizontal cables are ignored hereby. The two longitudinal steel box girders are supported on the transverse beams located at the inner side of the pier, the boundary conditions at these four ends of the two box girders are summarized in Table 4.There are two arch ribs in Sazhen North Railway Station Bridge and 17 double-suspenders are anchored in each arch rib. For the convenience of the following analysis, the anchorages of each arch rib are numbered from 1 to 17 from west to east; the two suspenders at each anchorage are numbered as a andb for north arch rib, a’and b’for south arch rib, respectively.That is to say, the34 suspenders in the north arch rib are marked as 1a, 1b, 2a, 2b, …, 17a, and17b respectively; accordingly, those 34 suspenders in the south arch rib are 1a’, 1b’, 2a’,2b’, …, 17a’, and 17b’(Fig.5) .5.3 Impact effect study due to the suspender breakWhen one or more suspenders break, there will be impact effect on the remaining structure and its other components. It is very important to know well the impact effect. In this section, the break of a suspender is appropriately simulated by assuming that two forces with equal value but opposite directions applied respectively to the broken suspender’s anchorages on arch riband bridge deck decrease to 0 within a time slot δt from the axial force value of that suspender.The impact effect due to a suspender’s break on the other components of the bridge is studied by carrying out time-history analysis based on the 3D finite element model in ANSYS.Of course, the impact effect due to a suspender’s break on the other components of the bridge is closely related to the time slot δt and the structural properties of the bridge. For a bridge in service, the impact effect is mainly dependent on the value of the time slot δt. Here the impact coefficient ηis defined as the ratio of the structural response under both the impact and deal loads to that only under the deal loads. The structural response of the bridge under kinds of loads refer to the stress, bending moment, axial force, displacement, and so on.In order to determine the appropriate value of the suspender break time slot δt for the following analysis, the relationship between the impact coefficient ηand the suspender breaktime slot δtis studied based on different suspender break cases. Theoretically, when a suspender(a or a’) breaks, the other suspender (b or b’) at the same anchorage should be impacted mor strongly than other members of the bridge, such as bridge deck, arch rib, and so on.Because of the symmetric arrangement of the suspenders (Fig.5) in Sazhen North Railway Station Bridge, the suspenders anchored to anchorage 1 to 9 arechosen to carry out the break simulation and impact effect analysis.At each anchorage, assuming the a (or b) suspender breaks, the curve to represent the relationship between the impact coefficient ηof the corresponding b (or a) suspender’stress and the time slot δtare obtained after the time-history analysis in ANSYS. The η-δt curves of four suspender break cases are plotted in Fig.6, shortest suspender 1a, second shortest suspender 1b, medium length suspender 5a and longest suspender9a.From Fig.6, it can be seen that relatively larger variation of ηhappens when the value of the time slot δtin the range of (0.01s, 1.0s) . When the suspender break time δtis longer than 1.0s,the impact effect is small and varies little with the increment of the break time. When the suspender break time δtis shorter than 0.01s, the impact effect is obvious but varies little with the variation of the break time. So the impact effect due to the suspender break can be appropriately simulated and obtained by the time-history analysis if the break time slot δt assumed to be shorted than 0.01s. In the following analysis, the time slot δtis taken as the value of 0.001s.It can also be shown in Fig.6 that the impact effect induced by the shorter suspender’s break is larger than that by the longer one.5.4 Analysis on the present designIn the present design of the example bridge, every suspender is composed of 61×Φ7mm parallel pre-stressed steel wires. The characteristic tension strength of the steel wires is 1670MPa. In this section, the safety of the remainingstructure of the example bridge is studied in various cases assuming that different numbers of suspenders at different anchorages happen to break. Theoretically speaking, the two suspenders at the same anchorage should break at the same time since they are designed with the same material and cross section. When two suspenders at the same anchorage happen to break at the same time, the other suspenders, bridge deck,transverse girder and longitudinal girder close to that anchorage will break in succession. For example, when the suspenders 2a and 2b break at the same time, the suspenders 1a, 1b, 3a and3b will break successively, the concrete plate and the longitudinal steel box girder near to the anchorage 2 will break, too (Fig.7). When the suspenders 7a and 7b break at the same time, the suspenders 6a, 6b, the concrete plate and the longitudinal steel box girder near to the anchorage 6 will fail successively (Fig.8).5.5 Analysis on new designBased on the new way put forward in this paper, the two suspenders at a same anchorage are hereby designed differently, one as 13-7Φ5 pre-stressed steel wire strand, the other 20-7Φ5pre-stressed steel wire strand. The suspenders 1a to 17a and 1b’to 17b’are assigned with13-7Φ5 pre-stressed steel wire strand, 1b to 17b and 1a’to 17a’with 20-7Φ5 pre-stressed steel wire strand. The characteristic tension strength of the pre-stressed steel wire strand is 1860MPa.The allowable stresses of the steel wire stand are 744MPa and 930MPa, respectively for temporary and permanent situation.Two representative cases are studied, (1) the suspender 1a composed of 13-7Φ5 pre-stressed steel wire strand at the anchorage 1 breaks; (2) every suspender composed of 13-7Φ5pre-stressed steel wire strand at every anchorage, i.e. 1a to 17a and 1b’to 17b’, breaks at the same time. In each case, the stresses of the other suspenders at three phases are obtained and summarized, before theassuming break, during the break and after the assuming break. The results of the two cases are shown in Fig.9a, b and 10a, b respectively.From Fig.9 it can be seen that suspender 1a break produces little impact effect on all other suspenders except suspender 1b, and suspender 1b can fully stand the obvious impact effect. It is shown in Fig.10 that when all the suspenders designed with 13-7Φ5 pre-stressed steel wire strand break at the same, the other suspenders are still safe even though they are obviously impacted. In both cases, the other components of the bridge, such as concrete plates, steel girders, arch ribs, remain safe under the impact effect, i.e. the bridge structure is still fully functional when one or more suspenders happen to break. By now the reasonability and reliability of the new design way for modern arch bridge is proved.6 CONCLUSIONSFor both half-through arch and through arch bridges, the suspenders are the important components. However, at the same time they are the vulnerable members to be damaged or ruined, because they usually work both in formidable natural environment and under fatigue-induced cycling loads. It is a fact that the service life of the suspender is much shorter than that of the arch bridge and the suspenders must be replaced timely. In recent years, the accidents of arch bridges’collapse caused severe casualties and huge economic loss.In this paper, the traditional design way of suspenders in through and half-through arch bridges is discussed first. A new way to design the suspenders in modern arch bridges is put forward successively based on the discussion. With the application of this new way, the arch bridge will remain safe even though one or more its suspenders happen to break. This new design way is a different method from the health monitoring to control the safety of the modern arch bridges under the condition that the break of the suspender is uncontrollable. The reasonability and reliability of this new design way for suspenders in through and half-through arch bridges is studied and proved by a numerical analysis example based on a real through-arch bridge. The impact effect of the remaining components of the arch bridge due to the break of one or more suspenders is obtained by appropriate simulation and time-history analysis by using the comprehensive commercial software ANSYS. It can be concluded from the analysis in this paper that the new way to design the suspenders in modern through and half-through arch bridges can assure the safety of the bridgeeffectively even though one or more suspenders happen to break.REFERENCESCh eng J., Jillian, J.J. Xian R.C. and Xian H.F., 2003. Ultimate load carrying capacity of the Lu Pu steel arch bridge under static wind loads, Computers & Structures 81, p.61-73.Li D.S. and Ou J.P., 2005. Arch bridge suspenders corrosion fatigue life assessment method and its application. Journal of Highway and Transportation Research and Develop men, 8(22): p.106-109.Li D.S., Chou Z., Deng N.C. and Ou J.P., 2007. Fiber Bragg Grating Sensors for Arch Bridge Suspender Health Monitoring, In Yuri N. Kuching, J.P. Ou, Cleg B. Vitric, Z. Chou (eds), Fundamental Problems of Optoelectronics and Microelectronics III; Proc. SPIE, 6595, p.65952U-1-6.Li H.N., Gao D.W. and Yid T.H., 2008. Advances in Structural Health MonitoringSystems in Civil Engineering, Advances in Mechanics 38(2): p.151-166.Li Y., Chen, Y.Y. Nile, J.G. and Chen B.C., 2002. The design and application of the composite bridges.Science Press, Beijing, China.Tang H.C., 2005. The Analysis of Cables’Hidden Trouble. Bridge 3, p.80-82.中文翻译一种新的方式,通过和半透过拱桥设计吊带R.J.江Y.Y.陈,Q.M.吴W.M.盖和D.M. Peng 深圳市政设计研究院,深圳,中国1 摘要这是众所周知的是,在通过和半拱桥吊杆的重要组成部分,因为它们连接拱肋,桥面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1317
A New Approach for the Simulation of Power Electronic Circuits
A new techniq for determining the transient and steady-state responses of power electronic circuits. In this technique, voltage sources are connected in parallel with the nonlinear elements and the mismatch currents through these sources are computed. The mismatch currents are the objective functions that are minimized iteratively by adjusting the parameters of the voltage sources. Alternatively, current sources may be connected in series with the nonlinear elements and the mismatch voltages across the current sources are calculated. The proposed approach can be defined as a fixed topology method that reduces to the sequential analysis of the circuit, twice per iteration. This simple procedure is equivalent to the computation of Jacobian matrices and their inverses. It leads to a substantial improvement in accelerating the convergence to the steady state.
Sreeramulu Raghuram Naidu and Antonio Marcus Nogueira Lima, Member, IEEE
Abstract—A new technique for simulating power electronic cir-
cuits consists of connecting voltage sources in parallel with non-
in accounting for topology changes is avoided by introducing linear output prediction and correction procedures [6]. Fixed topology methods are generally faster and easier to program than variable topology methods.
Detailed user-defined models for the semiconductor devices may be easily incorporated in the proposed algorithm, and control systems may be handled by treating them as nonlinear blocks. The technique does not require the determination of the conducting states of the switches. These instants are automatically obtained
nique is general and it can be applied for simulating the transient
and steady-state responses. Feedback control systems may be easily
(a)
(b)
included in the analysis. The responses of typical power electronic
Publisher Item Identifier 10.1109/TCSI.2002.802386.
(c)
Fig. 1. Proposed technique. (a) A nonlinear circuit. (b) Connection of voltage source. (c) Small-signal equivalent circuit.
match voltages across the current sources) are calculated. The ob-
jective of the proposed technique is to determine the voltage or cur-
rent sources for which the mismatch quantities are zero. The tech-
1057-7122/02$17.00 © 2002 IEEE
1318
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 49, NO. 9, SEPTEMBER 2002
I. INTRODUCTION
T HE technique for simulating the transient response of power electronic circuits usually consists of reducing the linear part of the circuit to its Thevenin equivalent and then applying the Newton–Raphson procedure for determining the currents in the nonlinear elements. Subsequently, the compensation theorem is applied to obtain the nodal voltages in the linear part. Efficient methods have been described to automate the procedure and diminish the solution time [1], and these methods have been incorporated in programs such as the MicroTran [2], which is a version of the Electromagnetic Transients Program (EMTP).
The steady state is determined, either by computing the transient response over a large number of periods at the fundamental frequency or by converting the response calculation into a two-point boundary value problem [3]. The former approach is a brute force technique whereas the latter approach converges rapidly to the steady-state response.
Several other algorithms for the transient analysis of power electronic circuits have been proposed [7]–[10], and these are variations of the general themes mentioned previously. However, very few techniques for the steady-state analysis of power electronic circuits have been presented.
circuits have been determined using the proposed technique.
Index Terms—Digital simulation, power electronic circuits, steady-state response, transient response.
The simulation of power electronic circuits has generally progressed along two distinct lines. On the one hand, the circuit has been treated as one of fixed topology and two-state resistors have been used to represent the nonlinear devices [4]. On the other hand, the power converter has been decomposed into a sequence of circuit topologies and the state equations for each configuration are determined. Digital simulation then consists of integrating the appropriate state equations over a small time-step and of subsequently establishing the topology for the next time-step [5]. In another approach, the time delay