DoD Unmanned Systems Integrated Roadmap FY2013
中德网联汽车标准化图路线对比

1、总体结构中方:一、总体要求(一)指导思想(二)基本原则(三)建设目标二、构建方法(一)技术逻辑结构(二)产品物理结构三、标准体系(一)体系框架(二)体系内容(三)近期计划四、组织实施附件:智能网联汽车标准体系表德方:1 简介2 自动和互联驾驶的相关标准化3 受资助的研究项目及标准化4 标准机构概述5 路线图的主题术语管理/工程标准驾驶辅助/ 驾驶功能测试系统、网络、数据及其接口定义HMI(人机交互)6 管理总结7 标准目录2、建设目标中方:到2020 年,制定30 项以上智能网联汽车重点标准,初步建立能够支撑驾驶辅助及低级别自动驾驶的智能网联汽车标准体系。
到2025 年,制定100 项以上智能网联汽车标准,系统形成能够支撑高级别自动驾驶的智能网联汽车标准体系。
德方:针对公共道路上车辆自动驾驶相关产品和基础设施的标准和标准化制定一个跨主体、跨领域的战略。
本路线图作为标准和标准化新增评估与方法的起点,以便在未来更加积极地实施面向需求的运营。
3、标准体系中方:德方:自动和互联驾驶的相关标准术语管理/工程标准驾驶辅助/驾驶功能测试网络数据及接口定义HMI (人机交互)智能网联汽车标准体系基础(100)术语和定义(101)分类和编码(102)标识和符号(103)通用规范(200)功能评价(201)人机界面(202)功能安全(203)信息安全(204)产品与技术应用(300)信息感知(301)决策预警(302)辅助控制(303)自动控制(304)信息交互(305)相关标准(400)通信协议(401)界面接口(402)3.1 术语中方:术语和定义标准用于统一智能网联汽车相关的基本概念,为各相关行业协调兼容奠定基础,同时为其它各部分标准的制定提供支撑。
德方:就标准化而言,术语包括给定术语的确定和定义。
在跨领域协作时,使用统一的术语范围等相关要求变得愈加重要。
此外,采用统一的语言加强了客户对新技术的认可。
中方:德方:203-1道路车辆功能安全203-2智能网联汽车人机交互系统失效保护要求及评价方法203-3汽车交互接口功能安全要求203-4汽车信息感知系统功能安全要求203-5汽车决策预警系统功能安全要求203-6汽车辅助控制系统功能安全要求ISO 26262道路车辆--功能安全性ISO/PAS 21448道路车辆--预期功能的安全性中方:德方:ISO 21434道路车辆—信息安全204-1汽车信息安全通用技术要求204-2汽车信息安全风险评估指南204-3汽车数据保护安全和隐私保护通用要求204-4车载操作系统及应用软件安全防护要求204-5汽车信息安全通用测试与评价方法204-6汽车信息感知设备安全技术要求204-7车载ECU 信息安全技术要求204-8车载总线系统信息安全技术要求204-9汽车网关信息安全技术要求204-10车载信息交互系统(TBOX )信息安全技术要求204-11车载诊断接口(OBD )信息安全技术要求204-12驾驶员身份认证系统技术要求204-13汽车软件升级信息安全防护规范204-14电动汽车远程信息服务与管理系统信息安全技术要求204-15电动汽车充电系统信息安全技术要求3.4 先进驾驶辅助系统中方:德方:301-1汽车倒车视野辅助性能要求及试验方法301-2自适应前照明系统性能要求及试验方法301-3汽车全景影像监测系统性能要求及试验方法301-4汽车夜视系统性能要求及试验方法301-5车距监测系统性能要求及试验方法301-6抬头数字显示(HUD)系统性能要求及试验方法301-7车载卫星定位系统信号接收装置性能要求及试验方法302-1道路车辆3.5吨以上的商用车报警系统302-2汽车盲区监测系统性能要求及试验方法302-3行人监测系统性能要求及试验方法302-4酒精闭锁检测系统性能要求及试验方法302-5汽车前撞预警系统(FCW)性能要求及试验方法302-6车道偏离预警系统(LDW)性能要求及试验方法302-7车门开启盲区监测系统性能要求及试验方法302-8汽车后方交通穿行提示系统性能要求及试验方法302-9智能限速控制系统性能要求及试验方法302-10预碰撞安全系统性能要求及试验方法302-11汽车泊车测距警示装置性能要求及试验方法302-12低速行驶操控辅助性能要求及试验方法302-13扩大范围的倒车辅助系统性能要求及试验方法302-14弯道车速预警系统性能要求及试验方法302-15驾驶员注意力监测系统性能要求及试验方法303-1低速跟车系统性能要求及试验方法303-2自适应巡航控制系统(ACC)性能要求及试验方法303-3全速范围自适应巡航控制性能要求及试验方法303-4乘用车自动紧急制动系统(AEB)性能要求及试验方法303-5商用车辆自动紧急制动系统(AEB)性能要求及试验方法303-6乘用车车道保持辅助系统(LKA)性能要求及试验方法303-7商用车辆车道保持辅助系统(LKA)性能要求及试验方法303-8正向碰撞缓解系统性能要求及试验方法303-9汽车紧急转向辅助系统性能要求及试验方法303-10车辆横向和纵向组合控制系统性能要求及试验方法共35项共36项(包括部分自动驾驶)3.5自动驾驶系统中方:德方:304-1自动泊车系统功能、性能要求及评价方法304-2城市工况自动驾驶系统功能、性能要求及评价方法304-3高速公路自动驾驶系统功能、性能要求及评价方法304-4车辆列队跟驰自动驾驶系统功能、性能要求及评价方法304-5有条件自动驾驶系统(CA)功能、性能要求及评价方法304-6高度自动驾驶系统(HA)功能、性能要求及评价方法304-7完全自动驾驶(FA)功能、性能要求及评价方法1)积极参与ISO TC22/SC33的WG9“测试场景”。
4、李洁—戴姆勒实现汽车可持续发展的技术路线图
• Software updates
升级软件
• Infotainment downloads
下载娱乐信息系统
• Set charging parameters and monitor state of charge
设定充电参数和监视充电状况
• Customer service plan
Gasoline CGI
汽油直喷
DiesOtto Fuel Cell
燃料电池
Clean Diesel with BlueTec清洁柴油
CNG, Biogas生物制气 Biodiesel 生物柴油
Hybrid/Plug In/ Range Extender
混合/插电/增程
Li-Ion锂电
Battery E-Drive
定量,付款 和账单
• Communication and control through internet
网上信息及控制
13
3. The Technology Roadmap – E-Mobility 技术路线图- 电动
Standardized Communication For Vehicle And Charge Spot 车辆与充电站间的标准化通讯
客服计划
• Position Information and theft protection
定位和防盗
• Heat and power cogeneration
同时供暖和发电
• Infotainment
娱乐信息系统
• Power generation
发电
• Load leveling
平衡负荷
• Metering, clearing and billing
俄罗斯成功研发新型人行道纳米涂层
考 了全 国各 地 的 下 水井 盖 安 全 事 故 对 策后 ,召 集 社 会 有识 之 士
和 地 方 团体 设 立 了 “ 水 井 盖 紧急 安 全对 策 委 员会 ” ( 称 下 下
进。
标和环保 标语 的设计、制作和 发放 ;制定 面向儿童和 中小学
校 的环 保 宣传 和 教 育 计 划 ;加 深 公 众 对 一 次 性 塑 料 袋 环 境 影 响 的 了解 。 公 众 要 自觉 将 一 次 性 塑料 袋 送 回任 意 一 家参 与 该
具体 来说 ,委 员会 制 定的安 全对 策有如 下 几方 面 : 第一 ,
作 为洛杉矶郡规模 较 大的城 市 ,在认真 贯彻郡政府上 述 计 划的 同时,洛杉矶 市议 会 于2 0 年5 0 9 月1 9日出台 了新规 定
( 杉 矶 市 第8 号 令 ) ,购 物 者 每 使 用一 个 塑 料 袋 需 缴 纳2 洛 7 5 美 分使 用税 ,其 中7 分 归销 售 点 所 有 , 另外 1 美 分 则 上 交市 美 8 政 府 , 用 于 支 持 全 市 垃 圾 循 环 回 收 和 防 止 环 境 污 染 的 各 项 计
紧急安 全 对 策” 。
意味 着可以将 太阳任何波段 的光转化为 电能,大大提 高了光电
转 化 效 率 ;且 每 层 设 计 为倾 斜 状 ,均 可 吸 收 到 太 阳 能 ,就像 阳 光 照 射 在 浓 密 森林 里 高矮 不 同的树 木上 一 样 ,层 层 递 进 ,相 互 影 响 并 协作 吸 收 。 ( 译 自俄 罗斯 微 技 术 网 w w nn e rr 摘 w . o t .) am e u
无人机地面控制站软件通用化研究
现代电子技术Modern Electronics TechniqueOct. 2023Vol. 46 No. 202023年10月15日第46卷第20期0 引 言地面控制站是无人机[1⁃4]系统控制的核心,可以完成对无人机的视距和超视距控制,它作为无人机系统控制的核心,在无人机系统的任务准备阶段、关键任务执行阶段直到最后的事后分析阶段都承担着重要工作。
地面控制站完成对无人机的控制,监视无人机的飞行状态和有效载荷的工作状态,实现对无人机的远距离操纵以及信息的实时监视、记录、分发[5⁃10]。
它的核心功能主要由软件系统实现,一般包括任务规划、飞行监视与控制、任务载荷监视与控制、链路监视与控制、综合数据管理和情报分发等。
任务规划的功能是:接收下达的无人机侦察任务,生成无人机侦察计划;根据飞行侦察任务的要求,制定出若干条可能的飞行航线,并生成相应的航线装订数据;同时依据接收到的无人机位置信息,在数字地图背景下绘制飞行轨迹。
飞行监视与控制的功能是:实现对无人机的操纵和监视,完成无人机飞行控制指令生成和发送,完成无人机遥测数据的接收和监视。
使操作员在操作席位上可DOI :10.16652/j.issn.1004⁃373x.2023.20.018引用格式:何文志.无人机地面控制站软件通用化研究[J].现代电子技术,2023,46(20):95⁃100.无人机地面控制站软件通用化研究何文志(中国电子科技集团公司第五十四研究所, 河北 石家庄 050081)摘 要: 无人机地面控制站作为无人机系统的核心,主要功能包括任务规划、飞行监视与控制、任务载荷监视与控制、链路监视与控制、综合数据管理和情报分发等。
经过多年建设,我国无人机地面控制站运用体系已初步形成,但仍然存在各型号无人机地面控制站不通用的问题。
软件系统是地面控制站的核心,同样面临如何实现通用化的问题,通过分析地面控制站的软件通用化技术途径,利用“通用模块+专用模块”的设计思路,建立基于数据分发服务(DDS )的地面控制站软件架构,给出一种通用的软件模块划分方法。
基于智能轮胎系统的实时路面辨识技术

基于智能轮胎系统的实时路面辨识技术目录一、内容描述 (2)1. 研究背景及意义 (2)2. 国内外研究现状 (4)3. 论文研究目的与内容 (5)二、智能轮胎系统概述 (5)1. 智能轮胎系统定义 (6)2. 智能轮胎系统组成 (7)3. 智能轮胎系统工作原理 (8)三、实时路面辨识技术原理 (9)1. 路面辨识技术概述 (10)2. 实时路面辨识技术原理 (11)3. 路面信息数据采集与处理 (12)四、基于智能轮胎系统的实时路面辨识技术实现 (13)1. 轮胎与路面交互作用分析 (14)2. 实时路面识别算法设计 (15)3. 系统软硬件设计 (16)4. 技术实现流程 (17)五、实时路面辨识技术应用及性能分析 (19)1. 实际应用场景分析 (20)2. 系统性能评价指标 (21)3. 系统性能测试及结果分析 (22)4. 应用前景展望 (23)六、智能轮胎系统实时路面辨识技术挑战与对策 (24)1. 技术挑战 (26)2. 解决方案与对策 (27)3. 进一步研究方向 (28)七、结论 (30)1. 研究成果总结 (31)2. 研究贡献与意义 (32)3. 研究展望与未来发展趋势 (33)一、内容描述本文档将详细介绍基于智能轮胎系统的实时路面辨识技术,随着汽车行业的快速发展和智能化趋势的推进,车辆对路面信息的实时感知和辨识变得越来越重要。
本文所探讨的智能轮胎系统便是这一领域的重要创新成果之一。
该技术能够实时监测并辨识路面状况,极大地提升了车辆行驶的安全性和稳定性。
该技术通过先进的传感器技术集成在轮胎系统中,实时收集路面信息,如路面纹理、摩擦系数、温度等关键数据。
这些数据通过无线传输技术迅速反馈至车辆控制系统,再由车辆控制系统结合算法进行数据处理与分析。
通过系统算法与大数据结合的路面特征模型对比匹配,实时识别和分类不同路面状况。
例如湿滑路面、干燥路面、颠簸路段、连续转弯路面等。
这种实时路面辨识技术为驾驶员提供了准确的路况信息,帮助驾驶员做出及时的驾驶决策,有效预防潜在风险,提高行车安全性。
哥本哈根慢行系统简述
哥本哈根的绿色交通文章来源:《北京规划建设》杂志作者:华高莱斯高级项目经理刘梦薇发布时间:2013-12-13生态城建设的软技术——绿色交通我国著名科学家、中国科学院院士何祚庥谈到何为真正意义上的生态城市时强调,生态城市中人类活动所产生的垃圾必须全部经过无害化处理,一切有害气体的排放源也应该被清除,城市的驱动能源应该主要是核能、太阳能、风能等清洁能源,而公共交通工具应该尽量使用电能进行驱动。
谈到生态城市的交通,不得不提绿色交通,绿色交通是生态城市建设的一项软技术。
在人们日常生活所产生的污染物中,出行造成的污染占比是相当高的。
但随着人们绿色出行意识的提高,通过政府、企业和民众间的积极配合,由出行所带来的污染将会得到有效控制,甚至可以做到零污染。
在北欧,全民绿色交通已经践行了几十年,不仅解决了城市交通拥堵、环境污染等“面子”问题,还从根本上解决了这些问题带给人“痛感”的“里子”问题。
全民绿色交通首屈一指的城市要数丹麦首都哥本哈根。
丹麦总人口550万,自行车数量却多达400万辆,哥本哈根更是著名的“自行车王国”。
哥本哈根发达的公交系统是自行车出行的有力支撑。
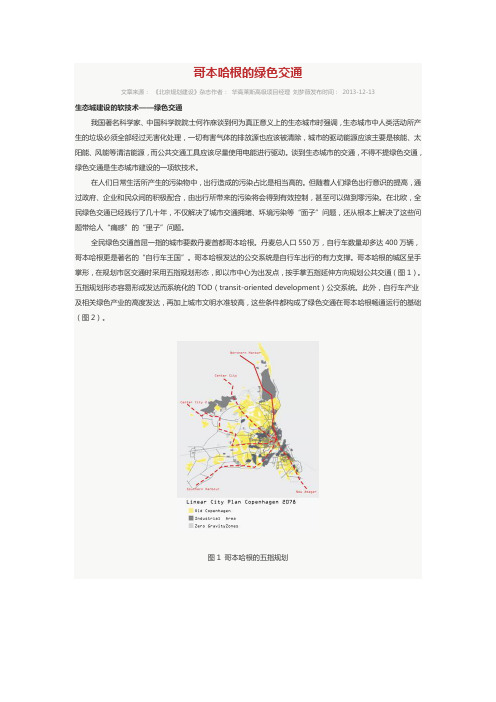
哥本哈根的城区呈手掌形,在规划市区交通时采用五指规划形态,即以市中心为出发点,按手掌五指延伸方向规划公共交通(图1)。
五指规划形态容易形成发达而系统化的TOD(transit-oriented development)公交系统。
此外,自行车产业及相关绿色产业的高度发达,再加上城市文明水准较高,这些条件都构成了绿色交通在哥本哈根畅通运行的基础(图2)。
图1 哥本哈根的五指规划图2 哥本哈根自行车高速公路线路图自行车高速公路工程哥本哈根第一个完整的自行车道规划于20世纪80年代早期,起源于丹麦骑车者联合会发起一系列示威游行,要求政府限制机动车发展,为自行车提供更安全便捷的出行环境。
1980年,哥本哈根市政府通过了第一个自行车网络规划,发展至今,自行车道长度已经达到390公里,共26条线路,其中包括三条自行车专用桥,这些专用桥为进入市中心的必经路线提供了安全通道(图3)。
airplane简介,发展历史
2 / 71
Outline
• 100 years of Controlled Flight • Introduction • Background • Countries • Brazil • Israel • Europe • Russia • France • United States of America • Germany • Boeing • Italy • Honeywell • Sweden • Lockheed Martin • United Kingdom • Summary
4 / 71
United Kingdom
Most Influential Predecessor of the Wright’s • Sir George Cayley in 1799 at Brompton, near Scarborough in Yorkshire sketched a “conventional” configuration of an aeroplane.
14 / 71
Background
Survey of the current practices and control design approaches used by the aircraft industry.
• Brazil , Europe (France, Germany, Italy, Sweden, United Kingdom), Israel, Russia, United States of America
6 / 71
Cambridge University, England
Lord Kelvin, President, Royal Society, undergraduate at Cambridge University, Senior Wrangler
uscar2解读 -回复
uscar2解读-回复UsCar2解读UsCar2是一种车辆行为数据集,该数据集记录了多辆车辆在城市环境中的行驶过程。
通过分析这些数据,我们可以深入理解车辆行为、交通流量和道路安全等方面。
本文将以UsCar2为主题,一步一步解析数据集,并探讨其应用和对交通领域的影响。
第一步:了解UsCar2数据集UsCar2数据集由德国诺伊豪斯大学的智能交通系统研究小组创建。
该数据集是通过模拟城市环境中的车辆行驶而获得的,每辆车都有自己的特定行为模式。
数据集中包含了车辆的位置、速度、加速度以及其他相关信息。
这些数据以实时序列的方式呈现,可以用来研究车辆行为和交通流量等问题。
第二步:数据集的应用与意义UsCar2数据集的应用范围广泛,主要体现在以下几个方面:1.交通规划与道路设计:通过分析UsCar2数据集,可以获得真实车辆行为的数据,为交通规划和道路设计提供参考。
例如,可以根据数据集中的交通流量和车辆速度等信息,优化道路布局、信号灯设置和车道规划,提高道路的通行效率和安全性。
2.智能驾驶技术:UsCar2数据集可以为智能驾驶技术的开发和优化提供有价值的参考。
通过分析数据集中的车辆行为模式和交通状况,可以改进自动驾驶系统的决策和控制策略,提高智能车辆的安全性和性能。
3.交通安全与风险评估:利用UsCar2数据集,可以对道路上的交通安全进行评估和风险分析。
通过分析数据集中的车辆行为数据,可以识别出潜在的交通事故风险区域,并提出相应的安全措施。
此外,还可以通过模拟不同交通场景,预测交通事故的发生概率,进一步优化交通安全管理。
4.交通行为研究与预测:UsCar2数据集为研究人员提供了研究车辆行为和交通流量的宝贵资源。
通过分析数据集中的车辆行为模式、速度分布和加速度等信息,可以深入研究车辆行为的规律和驾驶模式,为交通行为预测和交通流量管理提供理论支持和数据支持。
第三步:数据集解析与分析在对UsCar2数据集进行解析和分析时,可以采取以下步骤:1.数据清洗与格式化:首先,对数据集进行清洗和格式化,去除不完整或错误的数据,并将数据格式统一,以方便后续的分析和处理。
MSPA法在城市绿色基础设施网络构建中的应用综述
MSPA法在城市绿色基础设施网络构建中的应用综述随着城市化进程的不断加速,城市绿色基础设施建设成为提升城市生态环境质量,推动可持续发展的重要途径。
而城市绿色基础设施网络的构建是实现城市绿色发展的关键环节之一。
MSPA(多域参考多尺度空间适应性)法是一种常用于城市规划与设计的方法,通过对城市系统的多方面要素进行全面分析和评估,为城市绿色基础设施网络的构建提供决策支持。
本文将综述MSPA法在城市绿色基础设施网络构建中的应用,并探讨其优势和问题。
MSPA法可以综合考虑城市绿色基础设施的多个要素。
城市绿色基础设施包括绿地系统、水体系统、生物多样性系统等多个要素,而这些要素又相互关联,互为补充。
MSPA法可以通过对这些要素的空间分布、质量和可达性等方面的综合评估,确定城市绿色基础设施网络的优化布局。
通过对绿地系统的类型、面积、分布等因素的优化配置,可以提高城市的空气质量、生态系统服务功能,并改善居民的生活质量。
MSPA法可以考虑城市绿色基础设施的多个尺度。
城市绿色基础设施的规模和布局涉及到不同的空间尺度,如城市、区域、街区和建筑等。
MSPA法可以通过在不同尺度上分析和评估城市绿色基础设施的要素和功能,为不同尺度上的决策提供支持。
在城市层面上,MSPA法可以通过对绿地系统的空间布局和质量进行综合评估,为城市的整体规划提供指导。
而在街区层面上,MSPA法可以通过对绿地系统的可达性和适应性进行评估,为街区绿化和景观设计提供参考。
虽然MSPA法在城市绿色基础设施网络构建中具有许多优势,但也存在一些问题。
MSPA 法在实际应用中需要大量的数据支持和计算资源。
城市绿色基础设施的评估和优化需要大量的数据和信息,如土地利用数据、环境数据等。
MSPA法需要进行大量的计算和模拟,对计算资源和算法的要求较高。
MSPA法在处理不确定性和复杂性问题上存在一定的局限性。
城市绿色基础设施涉及到众多的不确定因素和复杂性问题,如气候变化、人口增长等。
UAV英文原站发表
UAV英⽂原站发表Unmanned Aerial Vehicles (UAVs)Unmanned Aerial Vehicles (UAVs) are remotely piloted or self-piloted aircraft that can carry cameras, sensors, communications equipment or other payloads. They have been used in a reconnaissance and intelligence-gathering role since the 1950s, and more challenging roles are envisioned, including combat missions. Since 1964 the Defense Department has developed 11 different UAVs, though due to acquisition and development problems only 3 entered production. The US Navy has studyied the feasibility of operating VTOL UAVs since the early 1960s, the QH-50 Gyrodyne torpedo-delivery drone being an early example. However, high cost and technological immaturity have precluded acquiring and fielding operational VTOL UAV systems.By the early 1990s DOD sought UAVs to satisfy surveillance requirements in Close Range, Short Range or Endurance categories. Close Range was defined to be within 50 kilometers, Short Range was defined as within 200 kilometers and Endurance as anything beyond. By the late 1990s, the Close and Short Range categories were combined, and a separate Shipboard category emerged. The current classes of these vehicles are the Tactical UAV and the Endurance category.Pioneer: Procured beginning in 1985 as an interim UAV capability to provide imagery intelligence for tactical commanders on land and see at ranges out to 185 kilometers. No longer in the Army inventory (returned to the US Navy in 1995).Tactical UAV : Designed to support tactical commanders withnear-real-time imagery intelligence at ranges up to 200 kilometers. Outrider Advanced Concept Technology Demonstration (ACTD) program terminated. Material solution for TUAV requirements is being pursued through a competive acquisition process with goal of contract award in DEC 99.Joint Tactical UAV (Hunter): Developed to provide ground and maritime forces with near-real-time imagery intelligence at ranges up to 200 kilometers; extensible to 300+ kilometers by using another Hunter UAV as an airborne relay. Training base located at Fort Huachuca, with additional baseline at Fort Polk to support JRTC rotations. Operational assets based at Fort Hood (currently supporting the KFOR in Kosovo).Medium Altitude Endurance UAV (Predator): Advanced Concept Technology Demonstration now transitioned to Low-Rate Initial Production (LRIP). Provides imagery intelligence to satisfy Joint Task Force and TheaterCommanders at ranges out to 500 nautical miles. No longer in the Army inventory (transferred to the US Air Force in 1996).High Altitude Endurance UAV (Global Hawk): Intended for missions requiring long-range deployment and wide-area surveillance (EO/IR and SAR) or long sensor dwell over the target area. Directly deployable from CONUS to the theater of operations. Advanced Concept Technology Demonstration (ACTD) managed by the US Air Force.Tactical Control Station (TCS): The Tactical Control Station is the software and communications links required to control the TUAV, MAE-UAV, and other future tactical UAV's. It also provides connectivity to other C4I systems.Micro Unmanned Aerial Vehicles (MAV): DARPA program to explore the military relevance of Micro Air Vehicles for future military operations, and to develop and demonstrate flight enabling technologies for very small aircraft (less than 15cm/6in. in any dimension).Sources and ResourcesVulnerabilities of unmanned aircraft system common data links to electronic attack(master's thesis) by Jaysen A. Yochim, U.S. Army Command and General Staff College, June 2010Integrating Department of Defense Unmanned Aerial Systems into the National Airspace Structure (master's thesis) by Scott W. Walker, U.S. Army Command and General Staff College, June 2010U.S. Army Unmanned Aircraft Systems Roadmap 2010-2035, April 2010 Unmanned Aircraft Systems: Comprehensive Planning and a Results-Oriented Training Strategy Are Needed to Support Growing Inventories Government Accountability Office, March 2010Defense Acquisitions: Opportunities Exist to Achieve Greater Commonality and Efficiencies among Unmanned Aircraft Systems, Government Accountability Office, July 2009United States Air Force Unmanned Aircraft Systems Flight Plan 2009-2047, U.S. Air Force, May 18, 2009Budget Request on Unmanned Aerial Vehicles (UAV) and Intelligence, Surveillance, and Reconnaissance (ISR) Capabilities, hearingbefore the House Armed Services Committee, April 19, 2007Unmanned Aircraft Systems: Additional Actions Needed to Improve Management and Integration of DOD Efforts to Support Warfighter Needs [GAO-09-175], Government Accountability Office, November 2008Unmanned Aircraft Systems: Federal Actions Needed to Ensure Safety and Expand Their Potential Uses within the National Airspace System [GAO-08-511], Government Accountability Office, May 2008Unmanned Systems Roadmap: 2007-2032, Office of the Secretary of Defense, December 2007Unmanned Aircraft Pilot Medical Certification Requirements, Federal Aviation Administration, February 2007 Unmanned Aircraft Systems Roadmap 2005-2030, Office of the Secretary of Defense, August 2005 (9 MB PDF file) Unmanned Aerial Vehicles and Uninhabited Combat Aerial Vehicles, Defense Science Board, February 2004Force Structure: Improved Strategic Planning Can Enhance DOD's Unmanned Aerial Vehicles Efforts, General Accounting Office report GAO-04-342, March 2004Access 5. Access 5 is a national project sponsored by NASA杦ith participation by the FAA, DoD, and industry杢o introduce high altitude long endurance (HALE) remotely operated aircraft (ROA) to routine flight in the National Airspace System (NAS). October 2003 ?Unmanned Aerial Vehicles: Background and Issues for Congress(PDF), April 25, 2003Pentagon Briefing on UAV Roadmap Report, March 18, 2003Unmanned Aerial Vehicles Roadmap: 2002-2027, Office of the Secretary of Defense, December 2002 (8.7 MB PDF file) Joint Unmanned Aerial Vehicles - Joint Test & Evaluation, official home pageSATUMA Pakistan develops unmanned aerial vehicles, including high speed target drones and multipurpose aerial surveillance aircraft. ?EE-1 Video Server Testbed, to make UAV data available via web browser in real time, Defense Information Technology Testbed, Center for Army Lessons Learned, 14 July 2000UAVs: DoD Press Briefing October 31, 2001, Briefing Slides: o UAV Evolution - Where are weo Army Tactical Umanned Aerial Vehicle.o Brigade Shadow 200 UAV.o Hunter TUAV Today's Workhorse.o Evolving TUAV Capabilities Include...o Predator UAV (Air Force).o Global Hawk (Air Force).o Navy UAVs.AIR COMBAT COMMAND CONCEPT OF OPERATIONS FOR ENDURANCE UNMANNED AERIAL VEHICLES 3 Dec 1996 - Version 2Unmanned Aerial Vehicles (UAVs): An Assessment of Historical Operations and Future Possibilities Air Command and Staff College 1997Tactical Reconnaissance: UAVs versus Manned Aircraft Rajesh Kumar;Charles D Cunningham (Faculty Advisor) Air Command and StaffCollege 1997The Pilotless Air Force Robert C Nolan Air Command and Staff College 1997A Moderate Course for USAF UAV Development Michael W. Kennedy; LanceA. Forbes (Faculty Advisor) Air Command and Staff College 1998 -USAF UAV course charted after its mid-1990s UAV acceptance was founded on unproven technology.1998 Unmanned Aerial Vehicles Conference Ft. Huachuca 3-5 Nov 98 1999 Unmanned Aerial Vehicles Conference Ft. Huachuca 21-23 Sep 99 ?PEO Intelligence, Electronic Warfare and Sensorso Army Science Board Briefing 9 June 1999o Team C4IEWS - Business Opportunities 18 May 1999o AUVSI ?9 Unmanned Systems 14 July 1999o TUAV Update: AUVSI Pax River 15 September 1999o A Perspective on Army UAV Needs and Initiatives23 September 1999o TUAV Overview 6 October 1999Naval UAV Executive Steering Groupo Executive Steering Group Meeting -- 24 Feb 1999o Executive Steering Group Meeting -- 16 Oct 1998o VTUAV Modular Mission Payloads -- 15 October 1998o Pioneer TCDL Integration -- 09 October 1998Unmanned/Uninhabited Aerial Vehicle (UAV) Command and Control (C2) Workshop, NATO Consultation, Command and Control Agency (NC3A) 9-10 February 1999UAV Characteristics Table DARO UAV Annual Report November 1996 Unmanned Aerial Vehicles: DOD's Acquisition Efforts GAO T-NSIAD-97-138 April 9, 1997Options for Enhancing the Department of Defense's Unmanned Aerial Vehicle Programs Congressional Budget Office -September 1998 ?Eyes in the Sky Aerial Systems Colonel Ronald W. Wilson Military Intelligence Professional Bulletin July-September 96SPECIAL OPERATIONS FORCES AND UNMANNED AERIAL VEHICLES: SOONER OR LATER STEPHEN P. HOWARD School of Advanced Airpower Studies JUNE 1995。
国外智能交通系统发展现状(2)
国外智能交通系统发展现状(2)国外智能交通系统发展现状到2003年6月末,日本装有汽车导航系统的车辆已达1200多万辆,同时装有汽车导航系统和车载信息通讯系统(VICS)接收器的车辆也达700多万辆,以上装置可以为驾驶员或其他机动车使用者提供即时道路信息。
因此,日本的道路车多而不乱。
路上诸多监测器和雷达,随时监控道路情况和采集信息,驾车人可通过情报信息板获取即时道路信息。
车载电子地图已广泛使用,有多家公司开发新产品,用户可在网上下载购买。
电子地图可通过卫星天线、微波、电视载波机、电话地址等多种渠道接收信息,使用电子地图,人们可以准确查询地址、气候、环境及计算拥堵时间等。
电子收费效率高从2001年3月开始,ETC(电子不停车收费)技术在日本整体上投入运营。
在实际应用中,ETC技术相对于传统收费技术来说有两大优势:一是更加适应于多个不同主体运营管理多条收费道路的情况;二是对非法行为、人为破坏和逃费行为有着更强的防范性。
从ETC的功能来讲,可以根据条件实现收费费率的灵活设定和调整,从而提高了收费道路的利用率,最大限度地减少了在收费口的拥堵。
一般来说,高速公路的拥堵30%由收费站造成,使用ETC后效率提高了2至3倍。
此外,ETC还改善了路侧的环境,对于解决一些地区接口或是不同管理体制下的特殊问题也十分有帮助。
ETC系统的应用在日本十分普及。
到2003年10月末,大约175万辆车已经装备了ETC车载装置,约为2002年同期的3倍,增速非常快,标志着ETC已进入普及阶段。
与此同时,到2003年年末,超过1000条ETC收费车道被安装在收费站,几乎遍及日本所有的高速公路。
目前,关东高速已全部实现了ETC收费,只保留部分车道进行ETC和半自动混合收费。
绝大部分的商业运营车辆已经装备了ETC车载单元,一般司机都使用ETC收费卡。
此卡分为两种,一种为储值卡或借记卡,另一种可与信用卡-通用。
日本最早出售的收费卡是高速公路卡,后来则采取措施鼓励ETC卡的销售和使用。
德国大众的先进安全辅助驾驶系统

德国大众的先进安全辅助驾驶系统
官小芬;朱余清
【期刊名称】《汽车维修与保养》
【年(卷),期】2011(000)012
【摘要】鉴于汽车保有量日益增加的趋势以及对未来汽车安全的需求,德国政府于2006年牵头并联合德国本土的研究机构、汽车制造商、供应商、电子通信公司等29家公司启动了旨在提高汽车安全性的研究开发项目,该项目的目标是开发满足未来交通的汽车安全辅助系统及交通管理系统,这一项目即称为"自适应协同控制的智能交通系统"。
德国大众汽车公司于2010年6月展示了具有独创性的先进的安全辅助驾驶试验车。
【总页数】4页(P24-24,26,28,37)
【作者】官小芬;朱余清
【作者单位】广州;广州
【正文语种】中文
【中图分类】U491
【相关文献】
1.“军科技护安全”——新星光电“夜朗星”夜视车载安全辅助驾驶系统隆重登场
2.先进汽车辅助驾驶系统(ADAS)发展现状及前景
3.先进汽车辅助驾驶系统(ADAS)发展现状及前景
4.基于多特征融合的汽车先进辅助驾驶系统前方车辆检测方法
5.先进汽车辅助驾驶系统(ADAS)发展现状及前景
因版权原因,仅展示原文概要,查看原文内容请购买。
超级公路的智能启航

超级公路的智能启航
陈楠枰[1]
【期刊名称】《交通建设与管理》
【年(卷),期】2018(0)5
【摘要】虽然现在断定光伏太阳能道路是否会成功还为时尚早,但是将它与移动式无线充电、无人驾驶智能车结合,不失为一个具有启发性的创举。
全球首个三合一超级道路示范工程建成,我们离未来道路还有多远?
【总页数】4页(P82-85)
【作者】陈楠枰[1]
【作者单位】[1]不详
【正文语种】中文
【中图分类】U469
【相关文献】
1.菲尼克斯电气智能战略正式发布!菲尼克斯电气智能战略推进联盟扬帆启航! [J],
2.超级公路的智能启航 [J], 陈楠枰
3.从智能教育2.0到智能产业菲尼克斯2.0全面启航 [J], 秦牧
4.攀登中国隧道新高峰!我国首台智能TBM“雪域先锋号”从“天路”启航 [J],
5.中关村发展集团助力“北京智造”加速发展首届全球智能应急装备大赛在北京房山启航 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
博世中国 高阶智能驾驶解决方案

博世中国高阶智能驾驶解决方案
佚名
【期刊名称】《汽车观察》
【年(卷),期】2024()3
【摘要】该解决方案包含传感器、计算平台、算法应用以及云服务等关键技术要素,同时具备面向未来的可扩展架构,已于2023年实现量产。
不仅配备有完整的系统安全设计,覆盖功能安全、网络安全、预期功能安全等方面,并且对软硬件开发流程及系统验证释放等方面都有着严苛的安全要求,提供覆盖城市、高速及高架、泊车等不同应用场景的端到端高阶智能驾驶体验。
【总页数】1页(P125-125)
【正文语种】中文
【中图分类】TP3
【相关文献】
1.博世力士乐为机床行业提供整体解决方案——访博世力士乐中国机床及汽车工业部门经理萧瑞华博士
2.博世:做智能制造的探索者与实践者——访博世(中国)投资有限公司工业4.0业务项目总监任晓霞
3.博世智造,联动未来——博世携全价值链工业
4.0解决方案亮相2016中国国际工业博览会4.人工智能让驾驶更高效、安全——聚焦博世2020CES上的创新技术
5.瑞萨电子的集成式驾驶舱技术是汽车智能驾驶舱不可或缺的解决方案
因版权原因,仅展示原文概要,查看原文内容请购买。
ATMOS能源公司德国慕尼黑总部新办公楼
ATMOS能源公司德国慕尼黑总部新办公楼
德国KSP建筑设计事务所
【期刊名称】《城市建筑》
【年(卷),期】2010(000)008
【摘要】@@ 经过慕尼黑火车总站走到阿努尔夫(Arnulf)大街上,可以看到美国ATMOS能源公司德国总部新办公楼.该办公楼的建设为慕尼黑市ArnulfPark区东部创造了一处开敞的空间环境,同时标志着这一地区新区建设的开始.
【总页数】4页(P75-78)
【作者】德国KSP建筑设计事务所
【作者单位】德国KSP建筑设计事务所
【正文语种】中文
【相关文献】
1.S.Oliver德国罗滕多夫总部办公楼 [J], 德国KSP建筑设计事务所
2.慕尼黑吕克总部大楼德国慕尼黑 [J],
3.慕尼黑吕克总部大楼,德国 [J],
4.德国慕尼黑全国汽车俱乐部总部 [J], 无
5.西门子全球总部德国慕尼黑 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DoD Unmanned Systems Integrated Roadmap FY2013-2038December 31, 2013The following roadmap was released on December 24, 2013 by the Department of Defense.Unmanned Systems Integrated RoadmapFY2013-2038•168 pages•December 2013• 4.4 MBUnmanned systems continue to deliver new and enhanced battlefield capabilities to the warfighter. While the demand for unmanned systems continues unabated today, a number of factors will influence unmanned program development in the future. Three primary forces are driving the Department of Defense’s (DoD) approach in planning for and developing unmanned systems.1. Combat operations in Southwest Asia have demonstrated the military utility of unmanned systems on today’s battlefields and have resulted in the expeditious integration of unmanned technologies into the joint force structure. However, the systems and technologies currentl y fielded to fulfill today’s urgent operational needs must be further expanded (as described in this Roadmap) and appropriately integrated into Military Department programs of record (POR) to achieve the levels of effectiveness, efficiency, affordability, commonality, interoperability, integration, and other key parameters needed to meet future operational requirements.2. Downward economic forces will continue to constrain Military Department budgets for the foreseeable future. Achieving affordable and cost-effective technical solutions is imperative in this fiscally constrained environment.3. The changing national security environment poses unique challenges. A strategic shift in national security to the Asia-Pacific Theater presents different operational considerations based on environment and potential adversary capabilities that may require unmanned systems to operate in anti-access/area denial (A2/AD) areas where freedom to operate is contested. Similarly, any reallocation of unmanned assets to support other combatant commanders (CCDRs) entails its own set of unique challenges, which will likely require unmanned systems to operate in more complex environments involving weather, terrain, distance, and airspace while necessitating extensive coordination with allies and host nations.The combination of these primary forces requires further innovative technical solutions that are effective yet affordable for program development.The purpose of this Roadmap is to articulate a vision and strategy for the continued development, production, test, training, operation, and sustainment of unmanned systems technology across DoD. This “Unmanned Systems Integrated Roadmap” establishes a technological vision for the next 25 years and outlines actions and technologies for DoD and industry to pursue to intelligently and affordably align with this vision. The Roadmap articulates this vision and strategy in eight chapters: Chapter 1: Introduction—This chapter explains the Roadmap’s purpose and scope. It examines the current unmanned environment from an inventory and budget perspective while also surveying the potential future environment. The chapter includes an operational vignette to show potential future capabilities using some of the technologies described later in this Roadmap. Also, the chapter explains the reduction in budget over the next five years beginning with the President’s Budget request for $5.6 billion in unmanned systems in Fiscal Year 2013. In fact, the unmanned air domain as described in the 2014 President’s Budget released to theU.S. Congress shows a 33.4% reduction in research, development, test, and evaluation and procurement funding from the previous year.Chapter 2: Strategic Planning and Policy— This chapter expounds on the structure, direction, and established guidance from DoD leadership toward planning anddeveloping unmanned systems. It briefly discusses some of the prevailing unmanned issues of the day and expresses departmental direction in their resolution.Chapter 3: CCDR Mission and Capability Needs — A joint perspective emerges in this chapter through a discussion of mission capabilities unique to unmanned systems and an explanation of the requirements process used to deliberately develop those capabilities to achieve improved efficiency, effectiveness, and survivability and to reduce the burden on manpower at lower costs while still meeting future operational requirements. The perspective establishes that future unmanned systems must• Provide capabilities more efficiently through su ch attributes as modularity, interoperability, integration with manned systems, and use of advanced technologies. • Be more effective through features such as greater automation, improved performance, and flexible use of capabilities.• Be more survivable in contested environments through improved and resilient communications, increased security from tampering, and system design.• Reduce manpower requirements to operate and support unmanned systems.Chapter 4: Technologies for Unmanned Systems— Certain key areas of interest for improving technology reflect DoD’s shift in strategic priorities and address the requirement to continue to reduce lifecycle costs across all systems, including unmanned systems. The six areas of interest highlighted in this chapter are interoperability and modularity; communication systems, spectrum, and resilience; security (research and intelligence/technology protection (RITP)); persistent resilience; autonomy and cognitive behavior; and weaponry. This chapter also describes how limited science and technology funding will potentially impact such emerging technology solutions.Chapter 5: Operating Environment — This chapter describes the operating environments of unmanned systems, which are critical in determining system performance flexibilities (e.g., appropriate levels of automation, maneuverability, communication options) needed to accomplish the mission. The chapter emphasizes that every aspect of the operating environment, including the physical and regulatory, should be incorporated in all acquisition lifecycle stages. Guidance is currently available from each Military Department although requirements and standards must still be developed to support new capabilities.Chapter 6: Logistics and Sustainment — The rapid development and fielding of large numbers and types of unmanned systems present DoD with a significant sustainment challenge. This chapter discusses the necessary transition from supporting immediate warfighter capability requirements to creating an affordable, long-term sustainment environment utilizing a flexible blend of original equipment manufacturers (OEM), other contractors, and organic support to meet logistics support objectives.Chapter 7: Training —The current state and forces shaping the training environment are similar to those that have shaped the logistics environment. As DoD transitions toa peacetime environment, the proper mix among the live, virtual, and constructive domains must be put into place to ensure that the asymmetric advantages offered by unmanned systems can be employed in future operations and at a reduced cost. This chapter describes the current state of training for unmanned systems, related challenges, and the way ahead.Chapter 8: International Cooperation —This chapter reflects DoD’s efforts to include cooperative research, development, test and evaluation, and regulatory/standard agreements of defense technologies and systems with foreign partners as well as the procurement of defense articles, systems, and services from foreign partners. DoD objectives and methods are explained. While DoD unmanned systems development funding will likely be constrained over the early part of this decade, unmanned systems (air, maritime, and ground) continue to hold much promise for the warfighting tasks ahead. If the technical, logistics and sustainment, training, and cooperation challenges are addressed by accomplishing the projects and tasks described in this Roadmap, advances in capability and affordability can readily address the needs dictated by the plans, policies, and operating environments. These advances will achieve well beyond what is attainable today.…Share this:。