B样条曲线曲面
B样条曲线曲面和NURBS曲线曲1
B 样条曲线曲面和NURBS 曲线曲面(学习笔记和上机练习)非均匀有理B 样条,通常简称为NURBS(Non-Uniform Rational B-Splines)。
NURBS 是非有理B 样条、有理以及非有理B ézier 曲线曲面的推广。
一、要对B 样条曲线曲面和NURBS 曲线曲面有所了解应先了解B 样条基函数 B 样条基函数的定义和性质令{}m u u u U ,...,,10=是一个实数列,即i u ≤1+i u ,i=0,1,…,m-1。
其中,i u 称为节点,U 称为节点矢量,用)(,u N p i 表示第i 个p 次(p +1阶)B 样条基函数,其定义为⎩⎨⎧=,0,1)(0,u N i 若i u ≤u <1+i u 值为1,其他值为0 )()()(1,11111,,u N u u u u u N u u u u u N p i i p i p i p i i p i ip i -++++++-+--+--= (2)由(2)式可知:(1))(0,u N i 是一个阶梯函数,它在半开区间),[1+∈i i u u u 外都为零; (2)当p >0时,)(,u N p i 是两个p -1次基函数的线性组合;(3)计算一组基函数时需要事先指定节点矢量U 和次数p ; (4)(2)式中可能出现0/0,我们规定0/0=0;(5))(,u N p i 是定义在整个实数轴上的分段多项式函数,只在区间][,0m u u 上有意义; (6)半开区间),[1+i i u u 称为第i 个节点区间,长度可以为零,因相邻节点可以相同; B 样条基函数的一些重要性质:1 如果),[1++∉p i i u u u ,则)(,u N p i =0。
2 对于所有的p i ,和u ,有)(,u N p i ≥0.3 对于任意的节点区间),[1+i i u u ,当),[1+∈i i u u u 时,∑-==ipi j pj u N1)(,。
B样条曲线

P4 P2
P0
F282.c 二次 B-样条曲线
4.三次B样条曲线 分段三次B样条曲线由相邻四个顶点 定义,其表达式为: P(t)=F0,3(t)•B0+F1,3(t)•B1+F2,3(t)•B2
+F3,3(t)•B3 (0≤t≤1) 可见,由 n 个顶点定义的完整的三次 B样条曲线是由 n-3 段分段曲线连接 而成的。很容易证明,三次B样条曲
角点共线的方法。
Q4
Q1
P1
。
P0
Q2
Q0
P2 Q3
• 四角点共线
若要使B样条曲线段之间切接入一段直线,可运用四
角点共线的方法。 Q5
Q1
Q2 。P1
P0
Q0
P2
P3
。
Q3 Q4
6.5 Bézier曲面和B样条曲面
6.5.1 Bézier曲面
Bézier曲面及控制网格演示动画
曲面的形状、位置由边界上的四个角点决定。中间角点只 反映曲面的凹凸程度。
三段曲线的形状。
角点重叠和角点共线(*)
• 二重角点
若要使B样条曲线与特征多边形相切,可运用二重角
点的方法。 P0
Q0 Q(0-1)
P1
Q1
Q2
P2
Q3
Q4
• 三重角点
若要使B样条曲线产生一个尖点1
P2 P3
Q1
P0
P4
Q5
Q0
Q6
• 三角点共线
若要使B样条曲线产生反向弧切接的效果,可运用三
✓用di1、di2、di3、di4(i=1,2,3,4 )构建四条V向曲线C1、C2、C3和C4(图中虚线);
✓参数v在[0,1] 之间取
B样条曲线曲面1
ε
d = f ( x0 , x1 , x2 , x) dx
3.3 B样条的递推定义
de Boor-Cox递推定义
⎧1 xi < x < xi +1 Bi , 0 ( x) = ⎨ ⎩0 Otherwise
Bi ,k ( x) = −x x − xi x Bi ,k −1 ( x) + i + k +1 Bi +1,k −1 ( x) xi + k − xi xi + k +1 − xi +1
由(3.11): ( xi + 2 − x) + − ( xi +1 − x) + ( xi +1 − x) + − ( xi − x) + − xi + 2 − xi +1 xi +1 − xi M i ,1 ( x) = xi + 2 − xi 可得: M i ,1 ( x) = 0, M i ,1 ( x) = xi + 2 − x , ( xi + 2 − xi )( xi + 2 − xi +1 ) x > xi+2 x ∈ [ xi +1 , xi + 2 ]
(3.15)
并约定
0 =0 0
3.3.1 B样条基的推导 1. 0次B样条
⎧1 xi < x < xi +1 Bi , 0 ( x) = ⎨ ⎩0 Otherwise
称之,0 ( x) “移位”可得: B
⎧ x − xi ⎪ x −x ⎪ i +1 i ⎪ xi + 2 − x Bi ,1 ( x) = ⎨ ⎪ xi + 2 − xi +1 ⎪ ⎪ 0 ⎩ xi < x < xi +1 xi +1 < x < xi + 2 Otherwise
b样条曲线曲面

B样条曲线的性质具体分析
• 1. 局部支柱性 B样条曲线与Bezier曲线的主要差别在于它 们的基函数。Bezier曲线的基函数在整个参 数变化区间内,只有一个点或者两个点处 函数值为零。而B样条的基函数是一个分段 函数,在参数变化范围内,每个基函数在tk 到tk+m的子区间内函数值不为0,在其余区 间为0,这一重要的特征称为局部支柱性。
• B样条的局部支柱性对曲线和曲面的设计有 两个方面的影响:一是第k段曲线段(p(t) 在两个相邻节点值[tk,tk+1)(m-1≤k≤n) 上的曲线段)仅仅由m个控制顶点Pk-m+ 1,Pk-m+2,…Pk控制。若要修改该段 曲线,仅修改这m个控制顶点即可。二是修 改控制顶点Pk对B样条曲线的影响是局部的。 对于均匀m次B样条曲线,调整一个顶点Pk 的位置只影响B样条曲线p(t)在区间[tk, tk+m)的部分,即最多只影响与该顶点有 关的m段曲线。局部支柱性是B样条最具魅 力的性质。
由于Bk,m(t)的各项分母可能为0,所以这里规定 0/0=0。m是曲线的阶参数,(m-1)是B样条曲 线的次数,曲线在连接点处具有(m-2)阶连续 性。tk是节点值,T=(t0,t1,…tn+m)构成了 m-1次B样条函数的节点矢量,其中的节点是非减 序列,所生成的B样条曲线定义在从节点值tm-1 到节点值tn+1的区间上,而每个基函数定义在t的 取值范围内的tk到tk+m的子区间上。从公式可以 看出,仅仅给定控制点和参数m不足以完全表达B 样条曲线,还需要给定节点矢量来获得基函数。
第七章 B样条曲线
V2k、V3k和V4k四个点, 该四点构成u向的一个特
d1
征多边形,定义一条新 2
的曲线P(u,vk);
d11
v
d14
d13
C1 d22
d23
C2 d32
d21
d31
u
d24 d33 C3 d4
2
d41
d34
d44 d43
C4
v
C1
C2 C3
V1k
V2k V3k
u
C4
V4k
✓当参数vk在[0,1] 之间取不同值时, P(u,vk)沿箭头方向扫描,即得到由 给定特征网格dij(i=1,2,3,4 j=1,2,3,4) 定义的双三次均匀B样条曲面片 P(u,v)。
t [0,1]
1
2
3
4
5
t
四段二次(三阶)均匀B样条基函数
曲线的起点和终点值:
pi
(0)
1 2
(Pi
Pi 1 ),
pi
(1)
1 2
(Pi1
Pi2 )
均匀二次B样条曲线起点和终点处的导数:
pi(0) Pi1 Pi , pi(1) Pi2 Pi1
P1
P2
P0
P3
四个控制点的二次周期性B样条曲线
第七章 B样条曲线曲面
Bezier曲线有许多优越性,但有几点不足: 一、控制多边形的顶点个数决定了Bezier曲线的
阶次; 二、不能作局部修改; 三 、Bezier曲线的拼接比较复杂。
• 1972年,Gordon、Riesenfeld等人发展了 1946年Schoenberg提出的样条方法 , 提出 了B样条方法,在保留Bezier方法的优点, 克服了Bezier方法的弱点。
B样条曲线曲面

第二章三维形态基本建模方法第一节形体的空间定位及表示方法一、空间、物体和结构我们每天的生活发生在三维环境中,而且充满着三维物体,我们总是看到、感到三维。
当设计实体模型时,我们通常认为许多事情理所当然。
但在用计算机对三维场景模型化时,那么我们不得不熟悉大量的计算机软件工具,这些工具可用于模型化物体和环境。
在描述三维场景的三维模型化软件中使用的许多基本约定是基于各种行业中使用的传统约定。
例如,建筑师为了用一个简明的方法表达他们设计的空间,使用各种涉及测量、构图和定序的约定。
即使简单的矩形房间设计也要测量多次,以便于房间的所有构件放在被设计放置的地方。
此外,为了准确地按照设计师的图纸来建造,泥瓦工需要进行测量。
多年来泥瓦工和建筑师已形成约定,如何测量空间、建造物体、在结构中安装,它们的约定是精确、简洁的。
我们用类似的约定来描述用一个计算机程序模拟的三维空间中物体的尺寸、位置和次序。
让我们从定义空间或场景的边界开始三维空间的定义,最简单的方法是想象我们是在一个大立方体内工作。
可以将这个立方体当作我们的空间或环境。
在这个立方体中的物体是可见的,在其外部的物体是不可见的。
在这个空间中的主参考点称为主空间原点。
这个原点通常位于这个空间的中心。
根据模型需要和方案,该点也可放在或重新放在其他点上。
所有三维空间都有3个基本的维:宽度、高度和深度。
表达三维空间中这些维的普遍方法是使用箭头或轴。
通常用字母X表示标记三维空间宽度的轴;用Y表示标记三维空间高度的轴;用Z表示标记三维空间深度的轴。
这三个轴交叉的空间点就是主坐标原点。
直角坐标系可以用来定义三维空间中特定的位置,精确定位三维空间中物体的点。
René Descartes是一位18世纪法国的哲学家和数学家,他正式使用标记为X、Y、Z的3个轴表示三维空间中维的思想。
他推导出的坐标系称为笛卡尔坐标系,在该系统中每个轴被分成许多测量单位。
原理上,这些单位是抽象的值,它可表示不同的测量单位和维刻度。
08_B样条曲线曲面
1 2 F ( t ) ( 1 t ) 0, 2 2 将 代入 P ( t ) 1 2 F1, 2 ( t ) ( 2t 2t 1) 2 F (t ) 1 t 2 2, 2 2
重要
PF
为了使P(t)能过P(i)点,只要使
Pi ,Pi 1 ,Pi 2 重合
尖点也可通过三重节点的方法得到 Pi ,Pi 1 ,Pi 2 为了使曲线和某一直线L相切,只要取
位于L上及
ti 3
的重数不大于2。
三次B样条曲线的一些特例
节点矢量:分为三种类型:均匀的,准均匀/开放均匀的和 非均匀的;
P ( t ) Pi Fi ,n ( t )
n
t [0,1]
i 0,1,, n
叫做n次B样条曲线段。
i 0
P ( t ) Pi Fi ,n ( t )
i 0
n
t [0,1]
i 0,1,, n
1 n i j j n 其中: Fi ,n ( t ) ( 1 ) C ( t n i j ) n1 n! j 0
B样条(Spline)曲线
在实际应用中,以Bernstein基函数构造的Bezier曲线有 许多优越性,但同时也存在一些缺点,主要有两点不足 之处: (1)其一是Bezier曲线不能作局部修改,即改变某一个 控制点,对整个曲线都有影响; (2)其二是当n较大,控制点较多时,Bezier曲线使用 起来不方便,即对曲线的控制减弱。若使用分段三次 Bezier曲线代替n阶Bezier曲线,则对控制点必须附加某 些条件,拼接比较复杂,也不便于使用。其原因是调和 函数在(0,1)的整个区间内均不为零。
第11-12讲 非均匀有理B样条曲线与曲面

上课内容
区间非零
次数p=2
顶点数n+1=4+1 M=n+p+1=4+2+1节点数m+1=8次数p=3
顶点数n+1=6+1
M=n+p+1=6+3+1
节点数m+1=11
9/17
11/17
例题:
三、NURBS 曲线形状的修改
(1)NURBS 曲线形状是由那些因素决定的?实际应用中,若要对NURBS 曲线作局部修改,一般可采取什么办法?
(2)如题图所示,由顶点V 0、V 1、V 2、V 3、V 4、V 5构造NURBS 曲线,改变顶点V 3所对应的权因子ω3得到的三条不同形状的曲线,B ,N ,B i 分别是ωi =0,ωi =1,ωi ≠{0,1}的对应曲线上的点。
1) 请写出ω3与点B ,N ,B i 及V 3四点之间的关系。
2) 定性分析ωi 对曲线形状的影响。
12/17圆锥曲线、圆弧及圆的NURBS 表示
CSF=ω2/ωω,
优弧、半圆可以利用重节点将两段、三段劣弧拼接组成。
内部重节点的一种给法:采用二重节点(端点仍为三重)
18/17。
第十二章 B样条曲面

第十二章B样条曲面B样条曲面在CAD/CAM中具有非常重要的地位,它可由B样条曲线通过直积推广而得,正如由Bézier曲线经由直积推广而得Bézier曲面一样。
本章主要讨论B样条曲面的性质及其相关的配套技术。
12.1 B样条曲面的定义及性质给定三维空间个点,参数和的节点矢量、,参数曲面:(12.1.1)称为次B样条曲面。
式中称为曲面的控制顶点或de Boor点,逐次用线段连接点列中相邻两点组成的空间网格叫做曲面的控制网格或de Boor网格,分别是由节点矢量定义的规范B样条基函数,次数分别为和。
由式(12.1.1)可以看出,次B样条曲面是由片次参数多项式曲面组合而成的多项式样条曲面。
其性质可由B样条曲线的性质推广而得。
1. 局部性。
次B样条曲面上参数为的点至多与个控制顶点有关,与其他控制顶点无关。
移动控制顶点至多影响到定义在区域上的那一部分曲面形状,对曲面的其余部分不产生影响。
2. 参数连性。
B样条曲面的每一片在其内部连续,而在节点处则是连续,其中分别是节点的重数。
3. 凸包性。
B样条曲面的每一片都位于定义该片曲面的控制顶点,的凸包之中,整个B样条曲面位于定义各片曲面的控制顶点的凸包的并集之中。
这样以来,B样条曲面的凸包区域就比同一组顶点定义的Bézier曲面的凸包区域要小,至多相同。
由凸包性质可以导出以下结果:•若控制顶点重合时,由这个控制顶点定义的次B样条曲面片便退化为这个重合点;•若上述的个控制顶点共面,那么所定义的曲面片便是平面片。
4. 磨光性质等。
同一组控制顶点定义的B样条曲面,随着次数的升高越来越光滑。
5. 仿射不变性。
B样条曲面在仿射变换下不便。
6. 对Bézier曲面的包含性。
若,且参数节点矢量选择如下:则由此确定的B样条曲面就是次Bézier曲面。
7. 等参数线。
固定,那么曲线是一条次B样条曲线,其控制顶点为同理,固定,其参数曲线为一条次B样条曲线,相应的控制顶点为然而,与Bézier曲面一样,变差缩减性对B样条曲面将不再成立。
B样条

1 Bi ,1 ( t ) = 0
ti Bi,2(t) ti+1 Bi,3(t) ti+1 ti+2 Bi+1,2(t) ti+2 Bi+1,3(t) ti+3 ti+4 ti+3 ti+4
t i <= t < t i +1 其他
1
B i( = , 2 t)
t − ti t −t Bi ,1 (t ) + i + 2 Bi +1,1 (t ) t i +1 − t i t i + 2 − t i +1
(ti , ti + k ) 上不为零,
所以曲线 P (t ) 在区间 (ti , ti +1 ) (k − 1 ≤ i ≤ n)
,
Pi 有关。 上的部分只与控制顶点 Pi −k +1 Pi −k + 2 反过来,如果只变动某一个控制顶点 Pi ( 0 ≤ i ≤ n) 曲线上只有局部形状发生变化,其他部分均 不发生变化。
,…,
P1 P4 P7
P2
P6
P′4 P0 P3
P5 P″4
图8-16 B样条曲线的局部支柱性
(2) 仿射不变性 B样条曲线和Bézier曲线一样,也具有仿射不 变性,即曲线 P (t ) 的形状和位置与坐标系的选择 无关。 (3) 分段参数多项式 P (t )在每一区间 [ti , ti +1 ](k-1≤i≤n)上都是次数不高 于k-1次的参数t的多项式曲线,所以 P (t ) 在 [tk −1 , tn +1 ] 上是关于参数t的分段多项式曲线。 (4)连续性 P (t ) 在L重节点 ti(k≤i≤n)处的连续阶不低于 k-1-L。整条曲线 P (t ) 的连续阶不低于 k − 1 − lmax ,其 中 lmax 表示位于区间 [tk −1 , tn+1 ]内节点的最大重数。
B样条曲线

08-09第二学期
二次B样条曲线的性质
先对 P(t)求导得:
P(t) t
111
2 1
1 0
B0 B1 B2
然后分别将 t=0,t=0.5,t=1 代入 P(t)
和 P’(t),可得:
P(0)=1/2(B0+B1), P(1)=1/2(B1+B2); P’(0)=B1-B0, P’(1)=B2-B1; P(1/2)=1/2{1/2[P(0)+P(1)]+B1} P’(1/2)=1/2(B2-B0)=P(1)- P(0)
P04 P14
P44
P03
P02 P01
P11 P21
P31
P41
P(0,v)
P20
P10
P30
Pn0 ,
P00
P(u,0) P40
赤峰学院计算机系
Bézier曲面的端点和边界线
计算机图形学
08-09第二学期
n m1
nm
P(u, v)
Bi,n (u)B j,m (u) pij
i0 j0
u, v [0,1]
使曲线与特征多边形相切; 使曲线通过指定点; 指定曲线的端点; 指定曲线端点的约束条件。
赤峰学院计算机系
计算机图形学
08-09第二学期
B样条曲线的适用范围
对于特征多边形的逼近性
二次B样条曲线优于三次B样条曲线
三次Bezier曲线优于二次Bezier曲线
• 相邻曲线段之间的连续性
二次B样条曲线只达到一阶导数连续
B样条曲线是由 n-3 段分段曲线连接
而成的。很容易证明,三次B样条曲
线在连接处达到二阶连续。 ***
赤峰学院计算机系
b样条曲面拟合 点云补全算法
样条曲面拟合在计算机图形学和计算机辅助设计中起着至关重要的作用。
而点云补全算法则可以用来处理三维模型中的空洞,使得模型更加完整。
本文将介绍样条曲面拟合和点云补全算法,以及它们在实际应用中的重要意义。
一、样条曲面拟合1. 什么是样条曲面样条曲面是一种平滑的、连续的曲面模型。
它由一个或多个贝塞尔曲线或B样条曲线组成。
样条曲面通常用来近似表示物体的外形,因为它具有高度的灵活性和精度。
2. 样条曲面拟合的意义样条曲面拟合可以用来找到一组曲面,使得这些曲面与给定的点集的拟合误差最小。
在实际应用中,样条曲面拟合可以用来重建缺失的曲面数据、对原始数据进行平滑处理、提取数据中的特征等。
3. 样条曲面拟合的算法常见的样条曲面拟合算法包括最小二乘法拟合、最小二乘法加惩罚项拟合、移动最小二乘法拟合等。
这些算法在拟合过程中会考虑拟合误差和模型的复杂度,以找到最优的拟合曲面。
二、点云补全算法1. 什么是点云补全点云补全是指通过给定的部分点云数据,来推断出完整的三维模型。
在现实世界中,许多三维扫描设备得到的数据存在缺失或者噪声,因此需要进行点云补全来修复这些缺陷。
2. 点云补全的意义点云补全算法可以用来处理三维重建、虚拟现实、医学图像处理等领域。
它可以帮助用户从不完整的数据中还原出完整的物体模型,提高数据的有效性和可视化效果。
3. 点云补全算法的分类点云补全算法可以分为基于拓扑结构的算法、基于形态学的算法、基于学习的算法等。
这些算法在补全过程中考虑了点云数据的拓扑关系、形状信息和学习模型,以较好地还原出完整的三维模型。
三、样条曲面拟合与点云补全的结合1. 样条曲面拟合在点云补全中的应用通过对局部点云数据进行样条曲面拟合,可以得到平滑的曲面模型。
这些模型可以用来填补点云数据中的空缺,从而实现点云补全的目的。
2. 点云补全在样条曲面重建中的应用点云补全算法可以用来处理样条曲面模型中的缺失部分,从而得到完整的曲面模型。
这样可以提高样条曲面的精度和完整性,使得它更加逼真和可靠。
B样条曲线曲面(附代码)
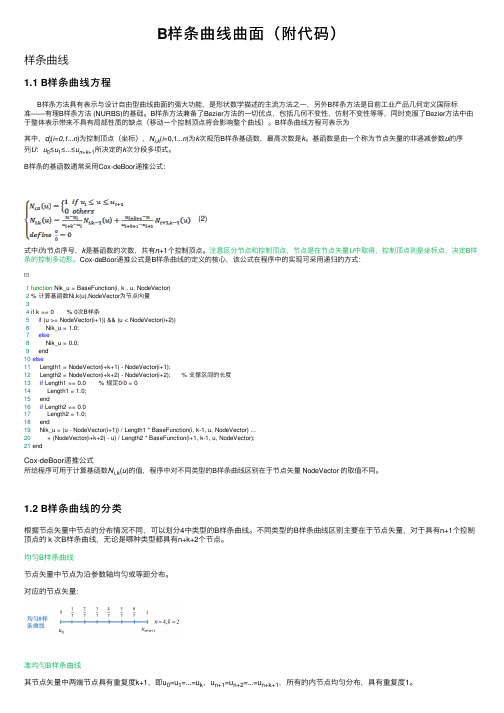
B样条曲线曲⾯(附代码)样条曲线1.1 B样条曲线⽅程B样条⽅法具有表⽰与设计⾃由型曲线曲⾯的强⼤功能,是形状数学描述的主流⽅法之⼀,另外B样条⽅法是⽬前⼯业产品⼏何定义国际标准——有理B样条⽅法 (NURBS)的基础。
B样条⽅法兼备了Bezier⽅法的⼀切优点,包括⼏何不变性,仿射不变性等等,同时克服了Bezier⽅法中由于整体表⽰带来不具有局部性质的缺点(移动⼀个控制顶点将会影响整个曲线)。
B样条曲线⽅程可表⽰为其中,d i(i=0,1...n)为控制顶点(坐标),N i,k(i=0,1...n)为k次规范B样条基函数,最⾼次数是k。
基函数是由⼀个称为节点⽮量的⾮递减参数u的序列U:u0≤u1≤...≤u n+k+1所决定的k次分段多项式。
B样条的基函数通常采⽤Cox-deBoor递推公式:(2)式中i为节点序号,k是基函数的次数,共有n+1个控制顶点。
注意区分节点和控制顶点,节点是在节点⽮量U中取得,控制顶点则是坐标点,决定B样条的控制多边形。
Cox-deBoor递推公式是B样条曲线的定义的核⼼,该公式在程序中的实现可采⽤递归的⽅式:1function Nik_u = BaseFunction(i, k , u, NodeVector)2 % 计算基函数Ni,k(u),NodeVector为节点向量34if k == 0 % 0次B样条5if (u >= NodeVector(i+1)) && (u < NodeVector(i+2))6 Nik_u = 1.0;7else8 Nik_u = 0.0;9 end10else11 Length1 = NodeVector(i+k+1) - NodeVector(i+1);12 Length2 = NodeVector(i+k+2) - NodeVector(i+2); % ⽀撑区间的长度13if Length1 == 0.0 % 规定0/0 = 014 Length1 = 1.0;15 end16if Length2 == 0.017 Length2 = 1.0;18 end19 Nik_u = (u - NodeVector(i+1)) / Length1 * BaseFunction(i, k-1, u, NodeVector) ...20 + (NodeVector(i+k+2) - u) / Length2 * BaseFunction(i+1, k-1, u, NodeVector);21 endCox-deBoor递推公式所给程序可⽤于计算基函数N i,k(u)的值,程序中对不同类型的B样条曲线区别在于节点⽮量 NodeVector 的取值不同。
第7讲-B样条曲线曲面

...
⎥ ⎥
⎢ ⎢
B2
⎥ ⎥
⎥⎢
⎥
⎢ ⎢
P2
⎥ ⎥
⎢
⎥
⎢
...
⎢
⎥ ⎢ ... ⎥ = 6 ⎢ ... ⎥
⎥⎢
⎥⎢
⎥
⎢
...
⎥⎢
⎥⎢
⎥
⎢ ⎢
141
⎥ ⎥
⎢ ⎢
B
n−
2
⎥ ⎥
⎢ ⎢
Pn
−
2
⎥ ⎥
⎢
1 4 1 ⎥ ⎢ B n −1 ⎥
⎢ Pn −1 ⎥
⎢⎣
1
5 ⎥⎦
⎢ ⎣
Bn
⎥ ⎦
⎢ ⎣
Pn
⎥ ⎦
用追赶法解上式
B
n
−
2
⎥ ⎥
⎢ ⎢
Pn
−
2
⎥ ⎥
⎢
1 4 1 ⎥ ⎢ B n −1 ⎥
⎢ Pn −1 ⎥
⎢⎣
1 4 ⎥⎦ ⎢⎣ B n ⎥⎦
⎢⎣ P n ⎥⎦
B样条曲线的节点插入与升阶
节点插入
具有较高的理论价值,在曲线曲面设计中广泛使用,优点: 简单证明B样条曲线的变差缩减性; 改善B样条曲线的局部性质,提高曲线形状控制的潜在灵活性 求出曲线上的点; 生成曲线的Bezier点,得到B样条曲线的分段Bezier表示; 实现对曲线的分割; 生成曲面时,使不相同的节点矢量统一起来
用追赶法解上式,将结果带入(2)式中求出Bi (i=-1,0,1,…n+1)即可。
B. 自由端点条件
一般取
B −1 = B 0 B n +1 = B n
联立式(1)(4)构成三对角线型方程组
[计算机辅助几何造型技术]第四章 B样条曲线与曲面
![[计算机辅助几何造型技术]第四章 B样条曲线与曲面](https://img.taocdn.com/s3/m/6eeec0f3700abb68a982fbf9.png)
由图可知,三次均匀B样条曲线段之间是C2连续的.
– 凸包性
– 局部性 – 变差减小性、几何不变性、参数连续性
2015/4/19
24
特征顶点(控制点)对曲线形状的影响
– 特殊情况1:三点共线
1 1 ri ( 0 ) = Vi +1 + (Vi − Vi + 2 ) + Vi +1 3 2
2015/4/19
27
– 特殊情况4:三个顶点重合
8
10
12
1 2
{t} = {0,1, 2,3, 4,5, 6, 7,8,9,10} {V } = {{0,0},{1,3},{4,4},{6,2},{5,-1},{9,-2},{13,2}}
2015/4/19
n=6 k =3
21
三次均匀B样条曲线的几何性质
– 性质一:端点性质
• 位置矢量
ri ( 0 ) = 1 (Vi + 4Vi +1 + Vi + 2 ) 6 1 =Vi +1 + (Vi − Vi +1 ) + (Vi + 2 − Vi +1 ) 6
合肥工业大学 飞行器制造工程 专业基础课程
计算机辅助几何造型技术
-- 第四章 B样条曲线与曲面
张兵 zhangbing_end@
2015/4/19
1
内容概要
B样条基函数的定义与性质 B样条曲线的定义、性质与分类 均匀B样条曲线 非均匀B样条曲线 B样条曲面
2015/4/19
{Vi } = {V0 ,V1 , ,Vn }
思考: 曲线次数由 谁确定?
B样条曲线曲面解析课件

两端插值的标准节点矢量是什么;
2 de Boor求值算法推导:
n
j
P(t) Pi Ni,k (t) Pi Ni,k (t)
i0
i jk 1
i
j
j k
图3.1.28 B样条曲线的deBoor算
法的几何意义
3.3.4 节点插入算法
通过插入节点可以进一步改善B样条曲线的局部 性质,提高B样条曲线的形状控制的灵活性,可 以实现对曲线的分割等。
插入一个节点
在定义域某个节点区间 ti ,ti1 内插入一个节点t,得到
新的节点矢量:
T 1
重新编号成为
Pj1 Pj ,
Pj1 (1 j )Pj1 j Pj ,
Pj1 Pj1,
j 0,1,,i k 1 j i k 2,,i r j i r 1,, n 1
j
t tj t jk 1 t j
r 表示所插结点t在原始节点矢量T中的重复度。
Pik 1 Pik 2 Pik 3
de Boor-Cox递推定义
1 Ni,1(t) 0
ti x ti1 Otherwise
Ni,k (t)
t ti tik 1 ti
Ni,k1(t)
tik t tik ti1
Ni1,k 1(t)
并约定
0 0
0
t0, t1 ,, tk1, tk ,, tn , tn1,, tnk , t 几1 个问n题k
i0
t [tk1, tn1]
Ni,k (t)
k 1 tik 1 ti
第7讲-B样条曲线曲面-NURBS曲线曲面

P(u, v)
i0 j0 mn
Pij Ri, p; j,q (u, v)
ij Ni, p (u)N j,q (v) i0 j0
i0 j0
u, v [0,1]
Ri, p; j,q (u, v)
m
ij Ni, p (u)N j,q (v)
n
rs Nr, p (u)Ns,q (v)
r0 s0
19
8
NURBS曲线曲面
B样条曲线、Bezier曲线都不能精确表示出抛物 线外的二次曲线,B样条曲面、Bezier曲面都 不能精确表示出抛物面外的二次曲面,而只能 给出近似表示。
提出NURBS方法,即非均匀有理B样条方法主要 是为了找到与描述自由型曲线曲面的B样条方 法既相统一、又能精确表示二次曲线弧与二次 曲面的数学方法。
n
i Pi Ni,k (t) nP(t) Fra biblioteki0 n
Pi Ri,k (t)
i Ni,k (t) i0
i0
Ri,k (t)
i Ni,k (t)
n
j N j,k (t)
j0
12
NURBS曲线---性质
Ri,k(t)具有k阶B样条基函数类似的性质:
局部支承性:Ri,k(t)=0,t[ti, ti+k]
P67-68
9
NURBS曲线曲面
NURBS方法的主要优点
既为标准解析形状(初等曲线曲面),又为自由型曲线 曲面的精确表示与设计提供了一个公共的数学形式。
修改控制顶点和权因子,为各种形状设计提供了充分 的灵活性。
具有明显的几何解释和强有力的几何配套技术。 对几何变换和投影变换具有不变性。 非有理B样条、有理与非有理Bezier方法是其特例。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二章三维形态基本建模方法第一节形体的空间定位及表示方法一、空间、物体和结构我们每天的生活发生在三维环境中,而且充满着三维物体,我们总是看到、感到三维。
当设计实体模型时,我们通常认为许多事情理所当然。
但在用计算机对三维场景模型化时,那么我们不得不熟悉大量的计算机软件工具,这些工具可用于模型化物体和环境。
在描述三维场景的三维模型化软件中使用的许多基本约定是基于各种行业中使用的传统约定。
例如,建筑师为了用一个简明的方法表达他们设计的空间,使用各种涉及测量、构图和定序的约定。
即使简单的矩形房间设计也要测量多次,以便于房间的所有构件放在被设计放置的地方。
此外,为了准确地按照设计师的图纸来建造,泥瓦工需要进行测量。
多年来泥瓦工和建筑师已形成约定,如何测量空间、建造物体、在结构中安装,它们的约定是精确、简洁的。
我们用类似的约定来描述用一个计算机程序模拟的三维空间中物体的尺寸、位置和次序。
让我们从定义空间或场景的边界开始三维空间的定义,最简单的方法是想象我们是在一个大立方体内工作。
可以将这个立方体当作我们的空间或环境。
在这个立方体中的物体是可见的,在其外部的物体是不可见的。
在这个空间中的主参考点称为主空间原点。
这个原点通常位于这个空间的中心。
根据模型需要和方案,该点也可放在或重新放在其他点上。
所有三维空间都有3个基本的维:宽度、高度和深度。
表达三维空间中这些维的普遍方法是使用箭头或轴。
通常用字母X表示标记三维空间宽度的轴;用Y表示标记三维空间高度的轴;用Z表示标记三维空间深度的轴。
这三个轴交叉的空间点就是主坐标原点。
直角坐标系可以用来定义三维空间中特定的位置,精确定位三维空间中物体的点。
René Descartes是一位18世纪法国的哲学家和数学家,他正式使用标记为X、Y、Z的3个轴表示三维空间中维的思想。
他推导出的坐标系称为笛卡尔坐标系,在该系统中每个轴被分成许多测量单位。
原理上,这些单位是抽象的值,它可表示不同的测量单位和维刻度。
在每个轴上,原点一边的值是正的,另一边的值是负的。
如右图所示,在右手坐标系中的每一个轴的正方向用箭头表示。
二、空间坐标系统在直角坐标系中的3个轴可用3种不同的方法进行配对,每两个轴配对定义一个平面或视图。
XY轴定义前视图(front plane);XZ轴定义顶视图(top plane);YZ轴定义侧视图(side plane)。
除常用的直角坐标系外,球坐标系或极坐标系也被广泛使用,因为它提供一个简单的表示三维世界中物体的方法,它使用原点到物体的距离,绕原点的角度,原点之上的高度角。
任何空间坐标系都适用于放置或移动空间中的物体或表示它们之间的相互关系。
主空间坐标系是相对于主空间原点的绝对值。
除主空间坐标系外,空间中的每一个物体可有其自己的物体或局部坐标系。
物体坐标系是相对于物体原点的,原点经常位于物体的中心。
第二节三维物体的基本元素一、点、线和面一旦学会怎样定位三维空间中的点和学会怎样产生编辑表达XYZ空间的数字表,就可以开始考虑构造简单的模型。
在右图中绘出的三维物体是由4个点、6条线、6个边和4个面定义的。
点、线和面是用于构造三维物体的基本元素。
一个点可以很容易用XYZ位置定义;一条线可以用其两个端点的XYZ位置定义;一条边可由两个邻接的面定义;一个平面可由其边界线的位置定义。
通常,一个物体由几个点、线和面组成。
定义大多数三维物体的平面被称作面(faces)——就像切割金刚石一样——或多边形(polygon)。
多边形可能是规则的,也可能是不规则的。
用三维计算机软件产生的许多三维形状是由多边形组成的。
简单的几何形状可用数十个多边形定义;要求相当多细节的茶杯之类的物体需要用数百个多边形来组成细节。
复杂的物体,比如一个详细的人的模型可能需要数千个多边形。
自然现象的模型可能需要数百万个多边形。
二、有关线的说明线用于定义物体的形状和许多表面模型。
线是所有三维物体的基本组成部分。
由于这个原因,所以了解线形之间的不同以及它们的属性、限制是重要的。
线之间的一个明显不同是,一些线是直线,而另一些线则是曲线。
直线用于定义两点间的最短距离;曲线用于表达变化的细节和增加设计的优美性。
在直线和曲线之间有许多重大的不同,它们相互有下列不同之处:∙它们的数学描述不同;∙当将它们用于模型时,它们的行为不同;∙它们产生的三维结构的类型不同;∙而且,在大多数情况下,它们的视像外表不同。
直线——正像名称所暗示的一样——没有任何弯曲。
直线仅由两个端点定义,可以有一个斜率,但角度不变。
换句话说,曲线的斜率是变化的,而直线的斜率是不变的。
在三维模型程序中有时将直线称为多边形线,因为它们用于构造多边形和多边形网。
只使用直线的三维计算机模型程序能只使用多边形网构造三维模型(不是用于基于样条的表面)。
使用曲线的三维模型计算机程序能够用曲面和多边形网构造模型。
曲线通常由几个点定义,而且从一条没有任何在角度上突变的直线路径推导而来。
曲线有时称为曲线段,而且能够用于定义曲面,构造曲面网。
曲线也常被称为样条,因为它们看起来就像物理样条,即一个细长的木头或金属条,制图员或建筑工人用它们在几个点间定出或找出曲线。
样条(传统上用于轮船船体的设计与构造)由铅锤成型。
通过改变重锤的数量和位置,可将样条改变成一条通过要求的点的光滑曲线。
曲线有许多类型,可以根据其数学和几何特征进行分类,主要的几种类型有:∙线性样条∙基本样条∙B样条∙Bezier样条∙NURBS所有样条都有一个共同的特征,即它们都是从定义一个多边形产生的。
由于这个共同的特征,所以将样条称为受控曲线。
控制样条的结构是不可见的,仅当形成样条时显示,但它包含用于改变样条形状的重要信息。
具体描述见第六节。
第三节基本几何形事实上,所有的三维建模计算机软件都提供工具集,通过一个称作“基本几何原素”的固定结构产生简单的形状。
在所有的情况下,使所有几何原素相互关联的特征是,它们都是标准形状,这些标准形状可由模型程序根据一个简单的、预定义的数学描述、毫不费力地产生和处理。
从原理上说,所有的几何原素都可按多边形结构或曲面块生成。
几何原素也可以用来表达简单的形状,或用作复杂、复合的三维形状的基础。
在前一种情况下,由工具提供的形状除在某些情况下需要修改它们在空间中的位置、大小和比例之外,几乎无需修改。
在后一种情况下,几何原素可以修改,或通过各种工具构造更复杂的物体,这些工具包括裁剪、连接和融合。
1.立方体(box)立方体通常按六面、封闭的三维物体模型化,因为立方体的所有面都有相同的长度,所以,通常立方体模型化的唯一变量是边长。
有时候,许多单元可以沿每一个坐标轴指定。
几乎总是使用多边形结构产生立方体。
2.球体(sphere)像立方体一样,球体也按对称、封闭的三维物体来模型化。
为了进行定义,所有的球体都需要半径或直径,而且可以使用多边形结构或一组曲面块模型球体。
当使用直线勾画,用多边形结构模型化球体时,一个球的定义要求许多沿经度或纬度的部分,这些部分看起来就像一个球体上的平行线和子午线。
它们的数量对最后形状的几何光滑度有一个成比例的影响。
当使用曲面块模型化球体时,除了上述的信息外,还要求指定一种类型样条。
球体也经常作为自由形式模型的起点。
3.圆柱体和锥体(cylindar&cone)圆柱体和圆锥体通常被定义为多边形物体,可以由下列变量定形:半径、高度、径向部件的数目,纬向部件的数目,和它们是否有端面。
用于构造圆柱体和锥体部件的数目定义这些物体模型的细节程度。
具有少量部件的物体能够比具有许多部件的物体更快地重绘。
4.圆环和圆管(toures&tube)圆环是三维的封闭的形状,看起来就像一个油煎圈饼,圆环就象一个弯曲延伸的、两个底面相互连接到一块的圆柱。
构造圆环要求的变量与构造球体要求的变量一样,另加一个变量,即半径。
建立一个圆环模型要求的变量包括:使用多边形还是使用曲面块、内半径大小、外半径大小、纬度划分数和经度划分数。
5.规则多面体(polygon)许多三维物体都属于规则多面体的范围,或属于具有多个面的物体的范围。
最常见的规则多面体包括四面体、八面体、十二面体、二十面体等等。
构造规则多面体一般需要指定一个半径和面数。
6.二维形状(shape)使用拉伸或旋转之类的模型构造技术,从二维形状可用来产生三维形状。
二维形状通常包括弧、圆、螺旋线、三角形、正方形和其他多边形。
第四节基本形体生成方法一、拉伸(Extrude)通过从一个二维轮廓线开始,沿一个坐标轴或沿一条直线拉伸或扩展它,产生三维形状。
简单的拉伸仅沿任一坐标轴进行。
被拉伸的二维轮廓线可以用几何原素工具产生,或由其它程序以可移植性好的文件格式产生的输出产生(比如EPS,即压缩的PostScript、IGES、DXF、AI等)。
二、旋转(Lathe)基于软件的旋转工具模拟实际的镟床,镟床是一种有旋转底座的工具,在底座上放一个圆柱形木料,随着底座绕垂直轴旋转,木料由放在它表面上的钢刀片成型。
陶工的转轮在一块粘土上进行几乎一致的操作。
随着一个刀片或尖锐的工具按预定义的路径移进移出,粘图或木料绕圆柱均匀地切削。
软件旋转工具将二维轮廓线绕轴旋转,二维形状可以是开口的,也可以是闭和的。
随着二维轮廓沿一个圆或径向路径旋转,产生一个新的三维形状。
随着它们的旋转,它通常保持与旋转路径垂直。
生成的三维物体由包含在旋转的二维轮廓线内的区域定义。
旋转面要有一个旋转角和多个步骤或面。
部件的的数量通常由轮廓线上的点数决定。
三、放样(Lofting)Lofting这个名词来源于古代的造船者,它运用复杂的截面来产生船身的一种造船程序,Loft则是在组合船身时用来支撑它而建造的工具,将截面举起置入Loft的过程便称为Lofting.在造型软件中,一个放样物体是由两个或更多的造型结合而成的。
其中一个造型用来当作路径(Path),主要用于定义物体的深度;另一个造型则用来作为物体的截面。
第二个造型我们通常称为平面造型(Shape)或是剖面(Cross Section),你可以在造型物体中任意插入许多需要的剖面。
第三章三维形态高级建模方法第一节自由曲线曲面的表示在形状表达领域中以复杂方式自由地变化的曲线曲面称为自由曲线曲面。
它在现实生活中大量地存在(如汽车车身、飞机、船舶等等),这类形状用传统的方式是不能很好地表达的。
自由曲线曲面可用隐函数方程和参数方程两种形式表示,如果用隐函数表示一圆心在原点单位半径的圆有如下形式:f(x,y)=0 即x2+y2-1=0若用参数形式来表达这个圆则可以表示为:x(u)=cos(u)y(u)=sin(u) 0<=u<=900或可表示为:x(t)=(1-t2)/(1+t2)若用参数形式来表示这个圆则可以表示为:或表示为:用参数形式表示自由曲线曲面有如下的优点:∙具有很好的几何不变性,即其形状不随所取的坐标系改变而改变;∙易于界定范围和表示空间形状;∙易于进行仿射变换和投影变换;∙易于局部位置的信息输入;∙便于对曲线曲面的形状进行控制基于以上原因,目前表示自由形状大都采用参数形式。