第四章 流体流动基本原理
第四章流体的有旋流动和无旋流动
第四章 流体的有旋流动和无旋流动在上一章中我们阐述了流体流动的一些基本概念,导出了流体流动的连续性方程、欧拉运动方程、伯努利方程和动量方程等,为解决工程实际问题奠定了一定的理论基础。
本章将进一步讨论流体的有旋流动和无旋流动。
第一节 流体微团运动的分析我们知道,刚体的运动一般可以分解为移动和转动两部分。
但流体与刚体不同,流体受力便会发生运动状态的变化,即流体具有流动性,极易变形。
因此,流体微团在运动过程中不但会发生移动和转动,而且还会发生变形运动。
所以,在一般情况下流体微团的运动可以分解为移动、转动和变形运动三部分。
变形运动又分为线变形运动和角变形运动两种情况。
下面我们分别讨论这几种运动情况。
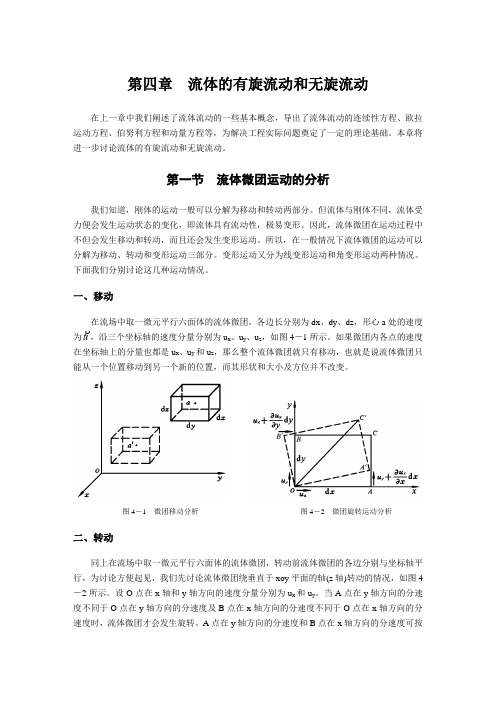
一、移动在流场中取一微元平行六面体的流体微团,各边长分别为dx 、dy 、dz ,形心a 处的速度为u,沿三个坐标轴的速度分量分别为u x 、u y 、u z ,如图4-1所示。
如果微团内各点的速度在坐标轴上的分量也都是u x 、u y 和u z ,那么整个流体微团就只有移动,也就是说流体微团只能从一个位置移动到另一个新的位置,而其形状和大小及方位并不改变。
图4-1 微团移动分析4-2 微团旋转运动分析二、转动同上在流场中取一微元平行六面体的流体微团,转动前流体微团的各边分别与坐标轴平行,为讨论方便起见,我们先讨论流体微团绕垂直于xoy 平面的轴(z 轴)转动的情况,如图4-2所示。
设O 点在x 轴和y 轴方向的速度分量分别为u x 和u y 。
当A 点在y 轴方向的分速度不同于O 点在y 轴方向的分速度及B 点在x 轴方向的分速度不同于O 点在x 轴方向的分速度时,流体微团才会发生旋转。
A 点在y 轴方向的分速度和B 点在x 轴方向的分速度可按泰勒级数展开,并略去高阶无穷小量而得到,它们分别为x xu u d y y ∂∂+和y yu u d xx ∂∂+,它们相对于O 点的对应分速度(相对于O 点的线速度)分别为x xu d y ∂∂和y yu d x∂∂,所以它们相对于O 点的角速度(逆时针方向旋转为正)应为A 点上xu x x xu ∂∂=∂∂y y d /dB 点上 yuy y y u ∂∂-=∂∂-x x d /d 而对于微团中其它各点绕z 轴转动的角速度(如C 点等)则是由该点y 向的分速度在x 轴方向的变化量和x 向的分速度在y 轴方向的变化量共同产生的。
第4章 流体基本知识
注:不是流体没有粘性
一、流体的静压强定义:
流体的压强(pressure) :在流体内部或固体壁面所存在的单位 面积上 的法向作用力 流体静压强(static pressure):流体处于静止状态时的压强。
p
lim
A0
P A
4、稳定流和非稳定流
定常流动(steady flow) :流动物理参数不随时间而变化
如:p f ( x, y, z), u f ( x, y, z, )
非定常流动(unsteady flow) :流动物理参数随时间而变化
如:p f ( x, y, z, t ), u f ( x, y, z, t )
式中μ——黏度或黏滞系数(viscosity or absolute viscosity)。
黏度的单位是:N.s/m2或Pa.s 黏度μ的物理意义:表征单位速度梯度作用下的切应力, 反映了流体黏性的动力性质,所以μ又被称为动力黏度。 与动力黏度μ对应的是运动黏度υ(kinematic viscosity),二 者的关系是
V 0
V 0
V
V
G V
三、流体的压缩性与膨胀性 1、压缩性: 定义:在一定的温度下,流体的体积随压强升高而缩 小的性质 表示方法:体积压缩系数β (The coefficient of compressibility)
1 dV V dp
(1/Pa)
2、膨胀性: 定义: 在一定的压强下,流体的体积随温度的升 高而增大的性质 表示方法:温度膨胀系数α(the coefficient of expansibility)
特别注意:流体静压强的分 布规律只适用于静止、同种、 连续的流体。
流体力学第四章

• 在每一个微元流束的有效截面上,各点的速度可认为是相同的 总流:无数微元流束的总和。
38
2016/12/26
流体运动学和动力学基础(Fluid Kinematics and Dynamics)
均匀流与非均匀流·渐变流和急变流
均匀流——同一条流线上各空间点上的流速相 同的流动,流线是平行直线,各有效截面上的 流速分布沿程不变 非均匀流——同一条流线上各空间点上的流速不 同的流动,流线不是平行直线,即沿流程方向速 度分布不均
迹线· 流线 1、迹线 1)定义:某一质点在某一时段内的运动轨迹 线。 2)迹线的微分方程
dx dy dz dt ux u y uz
烟火的轨迹为迹线
流体运动学和动力学基础(Fluid Kinematics and Dynamics)
流体运动学和动力学基础(Fluid Kinematics and Dynamics)
25
2016/12/26
流体运动学和动力学基础(Fluid Kinematics and Dynamics)
一维、二维和三维流动
三维流动:流动参数是x、y、z三个坐标的函数
的流动。
二维流动:流动参数是x、y两个坐标的函数的
流动。
一维流动:是一个坐标的函数的流动。
26
2016/12/26
流体运动学和动力学基础(Fluid Kinematics and Dynamics)
x= x (t)
dux ux ux dx ux dy ux dz ax dt t x dt y dt z dt
(1)当地加速度(时变加速度):流动过程中流体 由于速度随时间变化而引起的加速度; (2)迁移加速度(位变加速度):流动过程中流体 由于速度随位置变化而引起的加速度。
流体流动知识点总结归纳
流体流动知识点总结归纳流体力学是研究流体流动规律的一门学科,其研究对象涉及液体和气体的流动,包括流体的性质、流体流动的运动规律、流体的控制以及流体力学在工程和科学领域的应用等方面。
在这篇文章中,我们将对流体流动的一些基本知识点进行总结归纳,以便读者对这一领域有一个清晰的了解。
一、流体的性质1. 流体的定义流体是指那些易于变形,并且没有固定形状的物质。
流体包括液体和气体两种状态,其共同特点是具有流动性。
2. 流体的密度和压力流体的密度是指流体单位体积的质量,常用符号ρ表示。
流体的压力是指单位面积上受到的力的大小,它与流体的密度和流体所在深度有关。
3. 流体的黏性流体的黏性是指流体内部分子之间的相互作用力,黏性越大,流体的内部抵抗力越大,流动越不容易。
黏性会对流体的流动性能产生影响,需要在实际工程中进行考虑。
二、流体流动的基本原理1. 流体的叠加原理流体的叠加原理是指当多个流体同时流动时,它们的速度矢量叠加,得到合成的速度矢量。
这个原理在实际工程中有很多应用,例如飞机的空气动力学设计和水流的流体力学研究等。
2. 流体的连续性方程流体的连续性方程是描述流体在运动过程中质量守恒的基本方程,它表明流体在流动过程中质量的变化等于流入流出的质量之差。
3. 流体的动量方程流体的动量方程描述了流体在运动过程中动量守恒的基本原理,它表明流体在受到外力作用后所产生的加速度与外力的大小和方向有关。
4. 流体的能量方程流体的能量方程描述了流体在运动过程中能量守恒的基本原理,它表明流体在流动过程中所受到的压力和速度的变化与能量的转化和损失相关。
三、流体的流动类型1. 定常流动和非定常流动定常流动是指流体在任意一点上的流速和流量随时间不变的流动状态,而非定常流动则是指流体在不同时间点上的流速和流量随时间有变化的流动状态。
2. 层流流动和湍流流动层流流动是指流体在管道内流动时,各层流体之间的相互滑动,流态变化连续,流线互不交叉。
化工原理流体流动

化工原理流体流动化工原理中的流体流动是一个非常重要的概念,它涉及到化工工艺中许多关键环节,如管道输送、反应器内流动、搅拌反应等。
流体流动的研究不仅可以帮助我们更好地理解化工过程中的现象,还可以指导工程实践,提高工艺效率,降低能耗成本。
本文将从流体流动的基本原理、流体力学方程、流体流动的类型以及流动特性等方面进行探讨。
首先,我们需要了解流体流动的基本原理。
流体力学是研究流体静力学和动力学规律的学科,其中流体流动是动力学的重要内容。
流体流动的基本原理包括质量守恒、动量守恒和能量守恒等。
质量守恒原理指出在流体流动过程中,单位时间内通过任意截面的流体质量不变;动量守恒原理指出在流体流动中,单位时间内通过任意截面的动量不变;能量守恒原理指出在流体流动中,单位时间内通过任意截面的能量不变。
这些基本原理为我们理解流体流动提供了重要的理论基础。
其次,我们需要了解流体力学方程。
流体力学方程是描述流体运动规律的基本方程,包括连续方程、动量方程和能量方程。
连续方程描述了流体的质量守恒规律,动量方程描述了流体的动量守恒规律,能量方程描述了流体的能量守恒规律。
通过这些方程,我们可以定量地分析流体流动的特性,为工程设计和优化提供依据。
接下来,我们需要了解流体流动的类型。
根据流体的性质和流动状态,流体流动可以分为层流和湍流两种类型。
层流是指流体在管道内沿着同一方向以相对较小的速度均匀流动的状态,流线呈直线状并且不会相互交叉。
湍流是指流体在管道内以不规则的、混乱的方式流动的状态,流线呈曲线状并且会相互交叉。
不同类型的流体流动具有不同的特性,需要采用不同的方法进行研究和控制。
最后,我们需要了解流体流动的特性。
流体流动的特性包括速度分布、流动阻力、流体混合等。
速度分布描述了流体在管道内的速度分布规律,可以通过实验和模拟计算进行研究。
流动阻力是指流体在管道内流动时受到的阻力,它与管道的几何形状、流体的黏度等因素有关。
流体混合是指不同流体在管道内的混合过程,它对于化工反应器内的反应效果具有重要影响。
化工原理流体流动总结

化工原理流体流动总结1. 引言流体流动是化工过程中一个非常重要的基本行为,对于化工工程师来说,了解流体的流动规律和特性是非常关键的。
本文将对化工原理中流体流动的一些基本原理进行总结和概述。
2. 流体的基本性质在研究流体流动之前,我们首先需要了解流体的基本性质。
流体是一种物质状态,具有两个基本特征:能够流动和没有固定形状。
流体可以分为液体和气体两种,液体的分子之间存在着较强的分子间吸引力,而气体的分子间距离较大,分子间作用力相对较弱。
3. 流动的基本原理流动涉及到流体的质量守恒、动量守恒和能量守恒等基本原理。
3.1 流量和流速流量是指单位时间内流体通过某一横截面的体积或质量的多少,通常用符号Q表示。
流速是指单位时间内流体通过一个给定横截面的速度,通常用符号v表示。
流量和流速之间的关系可以用以下公式表示:Q = Av其中,A表示横截面积。
3.2 流体的连续性方程流体的连续性方程是质量守恒的基本原理,它表明流体在任意给定的流管截面上,流入该截面的质量等于流出该截面的质量。
连续性方程可以用以下公式表示:ρ1A1v1 = ρ2A2v2其中,ρ是流体的密度,A是截面积,v是流速。
3.3 流体的动量方程流体的动量方程描述了流体内部压力、速度和力的关系。
动量方程可以用以下公式表示:Δp + ρgΔh + 1/2ρv1^2 - 1/2ρv2^2 = ∑F其中,Δp是压力变化,ρ是流体的密度,g是重力加速度,Δh是高度变化,v1和v2是流体在不同位置的速度,∑F表示所有外力的合力。
3.4 流体的能量方程流体的能量方程描述了流体内部压力、速度和能量的关系。
能量方程可以用以下公式表示:Δp + ρgΔh + 1/2ρv1^2 + P1 - 1/2ρv2^2 - P2 = ∑H其中,P是流体单位体积的压力,Δp是压力变化,ρ是流体的密度,g是重力加速度,Δh是高度变化,v1和v2是流体在不同位置的速度,∑H表示所有外力对流体做的工作。
第四章 层流、湍流与湍流流动
gz
1
p
z
1 r r
r
vz r
2vz z 2
边值条件:
v z r
r 0
0,vz
r R
0
vr r
r 0
0,vr
r R
0
⑵问题简化:设L为足够长→无限长,流动达到稳态后速度分
布与z无关
vz 0 z
2v z z 2
0
vr 0
r方向:
1 p 0
r
z方向:
gz
1
p z
1 r
r
r
vz r
0
1
dp dz
gz
1 r
r
r
vz r
dp dz
gz
1 r
r
r
vz r
1
p p1
v 说明:p 减小, 变大,直到 p p0 止。
2.一维稳态等熵流动的基本特性
由连续性方程:G A1v11 Axvx x
Ax
G
vx x
A 为截面面积。
1
将速度式及代入上式:x
1
px p1
Ax
G
4.2 层流流动的定解问题
求解实际流体的流动问题应用连续方程和运动方程。对于不可压缩及 粘性为常量的情况下方程组封闭。否则,需补充状态方程、温度场方 程等。我们首先分析定解条件。 1. 初值问题:
流体流动PPT课件

③流体温度不变,U1=U2 ; ④流体克服流动阻力损失的机械能为wf 。
p1
gz1
1 2
u12
we
p2
gz2
1 2
u22
w
f
阻力损失
(1-15)
令
he
we g
及hf
wf g
则:
压头损失
p1
g
z1
u12 2g
he
p2
g
z2
u22 2g
h f
(1-16)
以上两式为实际不可压缩流体稳定流动的机械能衡算式 对于可压缩流体由于密度不为常数,所以不可用。
注:若在输送过程中压力改变不大,气体也可按不可压 缩流体来处理。
理想气体的密度:标准状态(1atm,0 ℃ )下 每kmol气体的体积为22.4 m3,则其密度为
理想气体标准状下 的密度,kg/ m3
气体的千摩尔质量
0
M 22.4
kg/kmol
理想气体T,p下的 密度,kg/ m30pp0p2
gz2
u22
2
p f
pa
全风压
压力降(阻力损失)
注:柏努利方程是针对理想流体而又无外功加入时的以 单位质量流体为衡算基准的机械能衡算式,实际流体的以单 位质量为衡算基准的机械能衡算式我们称为实际流体的柏努 利方程。
⑤ 对可压缩流体(如气体)
对可压缩流体,其ρ是随压力的变化而变化的,在流体 输送过程中,p是变化的,因此ρ也是变化的,但是对于短 距离输送,可把ρ看作常数,或者当
例:真空蒸发操作中产生的水蒸气 往往送入混合冷凝器中与冷水直接 接触而冷凝,为维持操作的真空度, 冷凝器上方与真空泵相接,不时将 器内的不凝性气体抽走。同时,为 了防止外界空气由气压管漏入致使 设备内的真空度降低,因此,气压 管必须插入液封槽中,水即在管内 上升一定的高度h,这种措施即为液 封。若真空表的读数为80ka,试求 气压管中水上升的高度h。
流体输送技术—流体的流动(化工原理课件)
dy
表示垂直于流体流动方 向的速度变化率,称为 速度梯度,单位1/s
B
牛顿黏性定律
比例系数μ称为黏性系数, 或动力黏度,简称黏度, 单位Pa•s
A
剪 应 力 du
dy
表示垂直于流体流动方 向的速度变化率,称为 速度梯度,单位1/s
B
服从此定律的流体 称为牛顿型流体
. du
dy
不服从此定律的 称为非牛顿型流
象
来的着色细直线开始呈波浪形,但仍保持较清晰的轮廓。
结
这种现象是一种过渡状态,不是一种独立的流动形态,受
果 外界条件以及流动干扰的控制。
流速 较大
现 继续增大阀门,管内水流速度较大时,着色水与管内的水流 象 完全混合。
结 流体质点除沿轴线方向作主体流动外,还在各个方向有剧烈 果 的随机运动,称为湍流,又可称为紊流。
玻璃直管
阀门
流速 较小
现 水槽中的液位恒定,当管内水流速度较小时,着 象 色水在管内沿轴线方向呈一条清晰的细直线。
结 流体质点沿管轴方向作直线运动,分层流动,称 果 为层流,又可称为滞流。
本 流体层流流动时,流体内部的分子通过微观随机 质 运动来传递动量、热量和质量。
流速 增大
现
阀门开度增大,管内水流速度增大,当增至某一值时,原
流体在圆管内分层流动
流体在圆管内以不同的速度如同一层 层的同心圆筒平行地向前运动。 运动着的流体内部相邻两流体层间的 相互作用力,称为流体的内摩擦力,是流 体黏性的表现,又称黏滞力或黏性摩擦力。
牛顿黏性定律
比例系数μ称为黏性系数, 或动力黏度,简称黏度, 单位Pa•s
A
内摩擦力
F A du
1 m2/s=104St=106cSt
流体力学第四章

1.渐变流及其特性
渐变流过水断面近似为平面,即渐变流是流线接近于
平行直线的流动。均匀流是渐变流的极限。
动压强特性:在渐变流同一过水断面上,各点动压强
按静压强的规律式分布,即
注:上述结论只适用于渐变流或均匀流的同一过水断面上 的 各点,对不同过水断面,其单位势能往往不同。
选取:控制断面一般取在渐变流过水断面或其极限情况均匀 流断面上。
即J=JP。 5.总水头线和测压管水头线之间的距离为相应段
的流速水头。
6.如果测压管水头线在总流中心线以上,压强就 是正职;如相反,则压强为负值,则有真空。
4.总流能量方程在推导过程中的限制条件
(1)不可压缩流体;
(2)恒定流;
(3)质量力只有重力,所研究的流体边界是静止 的(或处于平衡状态);
取管轴0-0为基准面,测压管所在断面
1,2为计算断面(符合渐变流),断面的形
心点为计算点,对断面1,2写能量方程(4-
15),由于断面1,2间的水头损失很小,
可视
,取α1=α2=1,得
由此得:
故可解得:
式中,K对给定管径是常量,称为文丘里流 量计常数。
实际流量 : μ——文丘里流量计系数,随流动情况和管
流体力学
第四章 流体动力学基础
本章是工程流体力学课程中最重要的一 章。本章建立了控制流体运动的微分方程, 即理想流体运动微分方程和实际流体的运 动微分方程;并介绍了求解理想流体运动 微分方程的伯努利积分形式;构建了工程 流体力学中应用最广的恒定总流运动的三 大基本方程:连续性方程、伯努利方程 (即能量方程)和动量方程。通过本章的 学习要培养综合运用三大基本方程分析、 计算实际总流运动问题的能力。
道收缩的几何形状而不同。
流体流动基本原理

以单位重量流体作为研究对象:
Z1
P1
g
u12 2g
He
Z2
P2
g
u22 2g
hf
m液柱
以单位体积流体作为研究对象:
gZ1
P1
u12 2
We
gZ2
P2
u22 2
W f
J/m 3
二、流体流动的基本原理
2.能量衡算(通过对能量衡算得柏努力方程) 现对柏努力方程进行讨论有:
(1) 没有外功加入的静止流体,即 u1 u2 0, He 0, hf 0
P1
g
u12 2g
Z2
P2
g
u22 2g
hf 13
hf 32 .......
(3)
hf 13
hf 32
Z1
Z2
h
h
l 2db
u2 b13 2g
l 2db
u2 b32 2g
1. 解析
(2)h
l 2db
u2 b13 2g
l 2db
u2 b32 2g
l 4db
g
(ub21
3
u2 b32
)
ub32
2ub13
的内径为50mm,管路总长为l,且l>>le流量为Vh,水塔水面与 送水管出口间的垂直距离为h。今用水量增加50%,需对送水管 进行改装。提出了如下方案:
⑴. 将管路换成内径为75mm的管子(图a) ⑵. 在管路上并联一根长度为l/2,内径为50mm的管子(图b) ⑶. 在管路中并联一根长度为l,内径为25mm的管子(图c)
用水量增加: 1.177 1 100% 17.7% h
1
2 图c 2
流体力学-第四章 流体动力学基础

Dt t CV
CS
单位质量流体的能量 e (u V 2 gz) 流体系统的总能量
2
DE ed eV ndS
Dt t CV
CS
E ed
初始时刻系统与控制体重合
Q WSYS Q WCV
ed eV ndS Q W
t CV
CS
§4.2 对控制体的流体力学积分方程
§4.1 系统和控制体,雷诺输运定理
雷诺输运定理:
举例:动量定理运用于流体系统
F Dk Dt
F 是外界作用系统的合力,K 是系统的动量,
k Vd
由于系统不断改变位置、形状大小,组成系统的流体质点的密度和速度随
时间也是变化的,所以系统的动量也是变化的,求其对时间的变化率,即
求该流体系统体积分的物质导数。
取 N M 单位体积的质量
DM 0 Dt
d V ndS 0
t CV
CS
d V ndS 0
t CV
CS
积分形式的连续性方程
§4.2 对控制体的流体力学积分方程
非定常流动情况下:
d V ndS 0
t CV
CS
即单位时间内控制体内流体质量的增加或减少等于同时间内通过控制面流入 或流出的净流体质量。如果控制体内的流体质量不变,则必然同一时间内流 入与流出控制体的流体质量相等。
左端第一项——是控制体内流体动量随时间变化而产生的力,它反映流体运动的非定常性
左端第二项——是单位时间内流体流入和流出控制体的动量之差,它表示流入动量与流出动量
不等所产生的力。
§4.2 对控制体的流体力学积分方程
定常流动条件:
F
FB FS
VV ndS
CS
VV ndS
化工原理--流体流动介绍

化工原理–流体流动介绍引言流体流动是化工工程中一个非常重要的基础概念。
无论是在化工过程中的液体的传输,还是气体在设备中的流动,都需要对流体流动进行深入的了解和研究。
本文将介绍流体流动的基本定义、流动模型、流体力学方程以及常见的流动行为。
通过对流体流动的介绍,读者将能够更全面地了解化工原理中的流体流动问题。
流动的定义流动是指流体在空间中运动的过程。
在化工过程中,流动一般可以分为液体流动和气体流动。
液体流动是指液体在管道、槽道或容器中的流动,主要涉及到液体的运动、运动状态和运动参数。
气体流动是指气体在管道、设备中的流动,主要涉及到气体的流动速度、气体流量和气体压力等参数。
流动模型在化工工程中,流体流动可以分为层流和湍流两种模型。
层流层流是指流体在流动过程中,流线穿过流体时呈现分层状态,流体粒子之间的相对运动速度较小。
层流的特点是流速分布规则、流体速度均匀,流体粒子之间的作用力较小,流体流动状态相对稳定。
层流一般发生在低速流动和粘性较大的流体中。
湍流湍流是指流体在流动过程中,流线交织混乱,流体粒子之间的相对运动速度较大。
湍流的特点是流速分布不规律,流体速度颠簸不定,流体粒子之间的作用力较大,流体流动状态相对混乱。
湍流一般发生在高速流动和粘性较小的流体中。
流体力学方程流体力学方程是描述流体流动的基本方程,其中最基本的是连续性方程、动量方程和能量方程。
连续性方程连续性方程是描述流体中质点的守恒关系。
对于液体流动来说,连续性方程可以表示为质流速的守恒,即质流速的变化量等于流入和流出的质量之和。
对于气体流动来说,连续性方程可以表示为能量流速的守恒,即能量流速的变化量等于流入和流出的能量之和。
动量方程动量方程是描述流体中质点的动力学性质。
对于液体流动来说,动量方程可以表示为流体的加速度与外力之差等于质量流量产生的力。
对于气体流动来说,动量方程可以表示为流体的加速度与外力之差等于能量流量产生的力。
能量方程能量方程是描述流体中能量变化的方程。
第四章 流体流动基本原理

mCV qm2 qm1 0 t
30
对稳态流动系统,流体及流动参数均与 时间无关,即
mCV / t 0
因此,质量守恒方程简化为
qm1 qm2
或 1v1 A1 2v2 A2
31
即稳态流动,输入与输出的质量必然相等。
对不可压缩流体的稳态流动,ρ=const,则
v1 A1 v2 A2
CV
0
vmax
2
故有
vmax=2v1
例题:一储气罐,罐中空气经管道向外界排出,
已知管道出口处气流密度和压强为均匀分布,而 速度呈抛物线规律分布:
已知排气管r0=0.025m,当储气罐 中p0=0.14MPa,T0=277.8K,测得 管道出口处气流vmax=32m/s,储气 罐和管道的总容积0.32m3。 试求此时从管口排出的空气流量以及储气罐和 排气管中空气密度随时间的变化率。
4
系统以外的物质称为外界。系统与 外界的分界面 称为边界。系统可通过边 界与外界发生力的作用和能量交换,但 不发生质量交换。质量不变是系统的特 点。
1 2 3
5
显然,对于流动过程,不管划定哪一部 分流体为系统,该系统都必然处于运动中, 其边界形状也会不断发生变化。因此,以系 统为对象研究流体运动,就必须随时对系统 进行跟踪识别其边界,这在实际流动过程中 显然是很困难的。况且,工程上所关心的问 题也不在于跟踪质量确定的流体的运动,而 在于确定的设备空间中流体的流动行为。所 以在工程流体力学中,更多的是采用以控制 体为对象而不是以系统为对象的研究方法。
23
ρ vcosθ =ρ ( v·n )
称为质量通量,其单位为kg/(m2s)。 于是通过微元面积dA的质量流量可表示为:
流体流动基本概念与基本原理.

流体流动–––基本概念与基本原理一、流体静力学基本方程式)(2112z z g p p -+=ρ或 gh p p ρ+=0注意:1、应用条件:静止的连通着的同一种连续的流体。
2、压强的表示方法:绝压—大气压=表压 表压常由压强表来测量;大气压—绝压=真空度 真空度常由真空表来测量。
3、压强单位的换算:1atm=760mmHg=10.33mH 2O=101.33kPa=1.033kgf/cm 2=1.033at4、应用:水平管路上两点间压强差与U 型管压差计读数R 的关系:gR p p A )(21ρρ-=- 处于同一水平面的液体,维持等压面的条件必须时静止、连续和同一种液体。
二、定态流动系统的连续性方程式––––物料衡算式常数常数=====≠ρρρρuA A u A u w s A 222111,常数常数======uA A u A u V s A 2211,ρ 21221221///,d d A A u u A ===圆形管中流动常数ρ 三、定态流动的柏努利方程式––––能量衡算式 1kg 流体:f h u P gZ We u P gZ ∑+++=+++22222111ρρ [J/kg] 讨论点:1、流体的流动满足连续性假设。
2、理想流体,无外功输入时,机械能守恒式:3、可压缩流体,当Δp/p 1<20%,仍可用上式,且ρ=ρm 。
4、注意运用柏努利方程式解题时的一般步骤,截面与基准面选取的原则。
5、流体密度ρ的计算:理想气体ρ=PM/RT 混合气体 vn n v v m x x x ρρρρ+++= 2211混合液体 n wn w m w m x x x ρρρρ+++= 2211上式中:vi x ––––体积分率;wi x ––––质量分率。
6、gz ,u 2/2,p/ρ三项表示流体本身具有的能量,即位能、动能和静压能。
∑h f 为流经系统的能量损失。
W e 为流体在两截面间所获得的有效功,是决定流体输送设备重要参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12
v n dA
4.2 质量守恒积分方程(续)
控制体净输出质量流量 =输出控制体的质量流量-输入控制体的质量流量
qm1 A1 v n dA,
系统内部的某一物理量的时间变化率是由两部分 组成,等于控制体内的该物理量的时间变化率加 上单位时间内通过控制面的该物理量的净通量。
9
目 录 4.1 概述 4.2 质量守恒积分方程 4.3 动量守恒积分方程
4.4 动量矩方程及其应用
4.5 能量守恒积分方程
10
4.2 质量守恒积分方程
一、控制体系统的质量守恒方程
24
4.3 动量守恒积分方程(续)
控制体净输出的动量流量
=输出控制体的动量流量-输入控制体的动量流量
控制体净输出的动量流 量= CS v v n dA
控制体内的动量变化率
控制体内的动量变化率 = v dV t CV
动量守恒分方程
F CS v v n dA t CV v dV
dmv F dt 系统
21
4.3 动量守恒积分方程(续)
对于流动系统,以控制体为对象研究其动量守恒时,
根据输运公式动量守恒方程表述为
作用于控制体 系统诸力之矢量和 输出控制体 的动量流量 输入控制体 的动量流量
控制体内的 动量变化率
控制体净输出的 动量流量
22
4.3 动量守恒积分方程(续)
2
R v1R vmax 2v1
2 2
19
目 录 4.1 概述 4.2 质量守恒积分方程 4.3 动量守恒积分方程
4.4 动量矩方程及其应用
4.5 能量守恒积分方程
20
4.3 动量守恒积分方程
一、控制体系统的动量守恒方程
根据牛顿第二运动定律,对于质量为m、速度为v
的运动系统,其动量mv随时间的变化率就等于作用 于该系统的诸力之矢量和,即
向与速度矢量v的方向相同。
23
4.3 动量守恒积分方程(续)
质量流量 v n dA 的正负
动量流量 v v n dA 的输出输入性质
若 v n dA 0,则 v v n dA 表示输出控制体的动量流量 若 v n dA 0,则 v v n dA 表示输入控制体的动量流量
A1——控制面上流体的输入面 A2——控制面上流体的输出面
qm1——流体输入控制体的质量流量 qm1 A1 v n dA qm2——流体输出控制体的质量流量 qm 2 A v n dA 2 mcv——控制体内的瞬时总质量
控制体净输出的质量流量
dm 量-输入控制体的动量 流量+控制体内的动量 变化率 =输出控制体的动量流 dt 系统
控制体净输出的动量流 量
dE 量-输入控制体的能量 流量+控制体内的能量 变化率 =输出控制体的能量流 dt 系统
控制体净输出的能量流 量
8
4.1 概述(续)
输运公式物理意义:
动量流量
——流体不断经过控制面,其输入或输出控制体的动
量只能以单位时间的动量即动量流量来计。 动量流量=速度×质量流量
质量流量: dqm v n dA 单位时间内流过控制体面积的流体的质量,单位kg/s。
动量流量:v dqm v v n dA
流体流过微元面积dA的动量流量,单位kg· m/s2,矢量,其方
qm1 qm2 1v1 A1 2v2 A2
即流体输入与输出控制体的质量流量必然相等。 2、不可压缩流体的稳态流动 不可压缩流体ρ=constant
守恒方程简化为
v1 A1 v2 A2
16
即流体输入与输出控制体的体积流量相等。
4.2 质量守恒积分方程(续)
例4-1 圆管层流的最大速度 不可压缩流体在半径为R的圆管内作层流流动。已知进口截面 1-1上,速度v1均匀分布,在截面2-2上,速度v2的分布为
y
2 y m2
q v1y qm1 q v1z qm1
29
F v
z
2 z m2
4.3 动量守恒积分方程(续)
例4-4 管道弯头的受力分析
流体稳态流动,经过位于x-y平面的弯头,弯头进口截面面 积为A1,流体速度v1与x轴平行,出口截面面积为A2,速度v2与 x轴夹角为β。试确定流体对弯头的作用力。 解: 取1、2截面之间的管道空间为控制体
第四章 流体流动的守恒原理
目 录 4.1 概述 4.2 质量守恒积分方程 4.3 动量守恒积分方程
4.4 动量矩方程及其应用
4.5 能量守恒积分方程
2
4.1 概述
一、系统与控制体 1、系统 ——一团确定不变的物质集合,拉格朗日法研究流体 运动的研究对象。 外界——系统以外的物质 边界——系统与外界的分界面 特点
设控制体进出口截面上流体的平均速度分别为v1和v2,
其x、y、z方向的分速度分别为 v1x、v1y、v1z和v2 x、v2 y、v2 z,
qm1、qm2表示进、出口截面的质 量流量
则x方向动量的净输出流量为
v v CS x n dA v2 x
A2
v n dA v1x
控制体内的 质量变化率
输出控制体的 输入控制体的 + - 质量流量 质量流量
7
4.1 概述(续) 输运公式
对控制体所包括的流体系统,其质量变化率可表述为:
dm 量-输入控制体的质量 流量+控制体内的质量 变化率 =输出控制体的质量流 dt 系统
控制体净输出的质量流 量
系统动量mv和能量E的变化率可表述为:
qm2
A2 v n dA
控制体净输出的质量流 量= CS v n dA
积分>0,输出控制体的质量流量大于输入流量
积分<0,输出控制体的质量流量小于输入流量
积分=0,输出控制体的质量流量等于输入流量
13
4.2 质量守恒积分方程(续)
控制体内的质量变化率
——控制体内的瞬时总质量对时间的求导
控制体内的质量变化率 = dV t CV
质量守恒方程
控制体净输出的质量流量+控制体内的质量变化率=0
即
CS v n dA t CV dV 0
14
4.2 质量守恒积分方程(续)
二、质量守恒方程的特殊形式
4
4.1
一、系统与控制体(续)
z
II
概述(续)
z v n
I II '
n v
III
o x
y
x
o
y
t时刻
t+△t时刻
系统 控制体
5
4.1
概述(续)
二、输运公式 ——将拉格朗日法求系统内物理量的时间变化率转换 为按欧拉法去计算的公式
系统所占有 的空间体积 t时刻 t+△t时刻
II+I II+III
根据质量守恒原理,对于质量为m的系统,其质量守恒方程为
dm =0 dt 系统
输出控制体的质量流量 -输入控制体的质量流 量+控制体内的质量变 化率 0
11
4.2 质量守恒积分方程(续)
质量通量 ——流体流过单位面积的质量 流量,单位kg/(m2s) v cos v n 质量流量 ——单位时间内流体流过微元面 dA的质量,单位kg/s
Fz v2 z qm 2 v1z qm1 t CV vz dV
28
4.3 动量守恒积分方程(续)
2、稳态流动系统的动量方程
稳态流动时,流体参数与流动参量均与时间无关,控
制体动量随时间的变化率为0,故动量守恒方程简化为
F v F v
x
2 x m2
q v1xqm1
控制体所占有 的空间体积
II+I
II+I
m t mI t mI I
m t t mII
t
t t
mI II
t t
6
4.1
系统的质量变化率为
概述(续)
mII t t mI II t t mI t mI I t m t t m t dm lim lim t 0 t 0 t t dt 系统 mII t t mI II t t mI t mI I t mI t t mI t t lim t 0 t mI II t t mII mI t t mII mI t mI t t lim lim lim t 0 t t 0 t 0 t t
R 0
r2 vmax 2 2 2 1 rdr v R R v R 1 1 R2 2
18
4.2 质量守恒积分方程(续)
控制体内充满不可压缩流体,其总质量不随时间变化,即
dV 0 t CV
守恒方程简化为
vmax
始终包含确定的流体质点 有确定的质量,质量不变 系统的表面常常是不断变形的
3
4.1 概述(续)
2、控制体 ——具有确定位置和体积形状的流场空间,欧拉法研 究流体运动的研究对象。 控制面——控制体的表面 特点 控制面上不仅有力的作用和能量的交换,而且还有 质量的交换。 一旦选定后,其形状和位置就固定不变
25
4.3 动量守恒积分方程(续)
对于直角坐标系,用