3.关节臂式测量 PPT课件
合集下载
第七讲机器人的机械臂结构PPT课件

2021
38
1机械臂结构机械臂结构一臂部设计的基本要求一臂部设计的基本要求1承载能力足承载能力足n手臂是支承手腕的部件设计时不仅要虑抓取物体的重量或携带工具的重量还要考虑运动时的动载荷及转动惯性
机械臂结构
2021
1
一、臂部设计的基本要求
2021
2
1.承载能力足
手臂是支承手腕的部件,设计时不仅 要考虑抓取物体的重量或携带工具的 重量,还要考虑运动时的动载荷及转 动惯性。
2—连杆 3—手臂 4—支承架
活塞的行程就控制
了手臂摆角的大小。
2021
23
齿轮驱动回转机构图例:
2021
24
3.关节型机械臂的结构(1)
存在的运动型式:
机身的旋转运动; 肩关节和肘关节的摆动; 腕关节的俯仰和旋转运动;
各运动的协调: 称为5轴关节型机器人。
2021
25
五轴关节型机器人手臂运动图例(1):
3、工字钢的长度按长度系 列购买。如:5~19m。
2021
5
槽钢(GB707-88)
1、槽钢的型号与高度尺寸 h有关,如:10号槽钢即指 其高度尺为100mm。
2、其它参数如截面积、单 位长度的理论质量、截面 静力矩等可查相应的设计 手册。
3、《钢结构》
2021
6
3、导向性能好,定位精度高
为防止手臂在直线运动中,沿运动轴 线发生相对转动,应设置导向装置。 同时要采用一定形式的缓冲措施。
2021
12
3.关节型
由动力型旋转关节 和前、下两臂组成。 关节型机器人以臂 部各相邻部件的相 对角位移为运动坐 标。动作灵活,所 占空间小,工作范 围大,能在狭窄空 间内饶过各种障碍 物。
三坐标测量机ppt课件

需要追加其 它角度,可 通过输入每 一个A、B角 ,然后对其 进行校验测 量。
46
产生测头文件
第七步
如果需要多组 复合角度,可 以通过A、B 角的起始角, 它们的增量和 终பைடு நூலகம்角的输入 来实现。
当所需的测 头位置全部 输入后,选 择“测量” 。
47
产生测头文件
第八步
输入测量标 准球的点数 。
48
逆向工程技术
1
内容
– 三坐标测量机的发展历程 – 三坐标测量机的类型和组成 – 测量方法分析 – 三坐标测量机应用 – 三坐标测量机的发展趋势
2
一、三坐标测量机的发展历程
前言
三坐标测量机(CMM)是20世纪60年代发展起来的一种新型 高效的精密测量仪器。它的出现,一方面是由于自动机床、数控机 床高效率加工以及越来越多复杂形状零件加工需要有快速可靠的测 量设备与之配套;另一方面是由于电子技术、计算机技术、数字控 制技术以及精密加工技术的发展为三坐标测量机的产生提供了技术 基础。
27
关节旋转测座
B角从-180 °到180 °以 7.5 °的分度(按顺时针 、逆时针)旋转
B 角旋转
28
关节旋转测座
正如TP20这样的机械测 头,包括3个电子接触器 ,当测杆接触物体使测 杆偏斜时,至少有一個 接触器断开,此时机器 接触器断开 的X、Y、Z光柵被读出 。这组数值表示此时的 测杆球心位置。
15
(2)测头系统 测头是坐标测量机触测被测零件的发讯开关, 是坐
标测量机的关键部件,测头精度的高低决定了坐标测 量机的测量重复性。三坐标测量机的功能、工作效率、 精度与测头密切相关。三坐标测头的两大基本功能是 测微和触发瞄准。
关节活动度评定-PPT课件
• 3.拇趾的MP屈曲、伸展 • 体位:踝关节中立位。 • 中心:趾跖关节。 • 固定臂:第1跖骨。 • 移动臂:第1节趾骨。 • 正常值:屈曲0-35°,伸展0-60°。
• 4.拇趾的IP屈曲、伸展 • 体位:踝关节中立位。 • 中心:趾间关节。 • 固定臂:第1节趾骨。 • 移动臂:末节趾骨。 • 正常值:屈曲0-60°,伸展0。
食指分离方向的运动。 掌侧内收,与外展相反,做返回食指
方向的运动。 正常值:掌侧外展0-90°,掌侧内收90°-0。
手指
手指掌指关节屈曲
• 体位:坐位,前臂、手放于桌面,前臂 、腕关节中立位。
• 中心:相应掌指关节桡侧。 • 固定臂:相应掌骨纵轴。 • 移动臂:近节指骨纵轴。 • 运动:指骨向靠近手掌方向运动。 • 正常值:0-90°。
• 中心:相应远端指骨间关节桡侧。 • 固定臂:中节指骨纵轴。 • 移动臂:远节指骨纵轴。 • 运动:远节指骨向靠近中节指骨方向运动。 • 正常值:0-90°。
附:手指的外展、内收
• 体位:腕关节中立位,手指伸展位。
• 中心:两轴的交点。
• 固定臂:第3指骨纵轴。
• 移动臂:第2、4、5指骨纵轴。
运动。 伸展,从基本肢位向屈曲相反的方向
运动。 • 正常值:屈曲0-135°,伸展0°。
附:小腿外旋、内旋
• 体位:坐位,膝关节90°屈曲,踝关节中立位。 • 中心:足跟在膝上的投影。 • 固定臂:膝关节90°屈曲,足长轴所指的方向。 • 移动臂:第二趾骨与跟骨的连线。 • 运动:是膝关节和踝关节的复合运动。
向后方的运动。 注意固定骨盆,防止躯干的代偿
运动。 • 正常值:0-30°。
外展
• 体位:仰卧位,避免大腿旋转。 • 中心:髂前上棘。 • 固定臂:左右髂前上棘连线。 • 移动臂:股骨纵轴(髂前上棘与髌骨中心
关节臂式三坐标应用
四、三坐标高级应用案例
2.虚拟装配分析
组装间隙优化 组装间隙优化前的初始对齐
优化时根据名义值调 整对齐,名义值来自 CAD或手动输入
组装间隙优化后的结果
四、三坐标高级应用案例
3.大灯装配分析
四、三坐标高级应用案例
4.顶棚漏雨分析
四、三坐标高级应用案例
5.汽车腰线分析
CAD模型
扫描数据
四、三坐标高级应用案例
补偿点 沿法向矢量
9
三、三坐标主要功能
1.基本测量功能:即测量零件的几何尺寸,形位公差(平面度,平行度,垂直度, 同轴度,位置度,直线度等),三维坐标。
10
三、三坐标主要功能
1.基本测量功能:即测量零件的几何尺寸,形位公差(平面度,平行度,垂直度, 同轴度,位置度,直线度等),三维坐标。
总拼焊装夹具的标定调整
1.精度高:测量精度达到0.049μm;
产品设计开发 汽车主机 厂品质保 证
2.便携性:轻便易携带,满足随时随地测量需要;
3.测量功能:可满足几何元素、三维坐标、 形位 公差、曲线曲面测量和扫描、逆向
大型零部 件的现场 测量
工程、CAD数模比对检测等测量;
4.测量范围:可实现6个自由度3.7m范围内的测 量(使用蛙跳球阵,测 量范围更广)
1.形变分析
碰撞试验前后,对于整车或零件关键位置的测量,研究形变量; 对于测试前后假人关键位置的测量,研究对于人体的冲击量。
20
四、三坐标高级应用案例
2.虚拟装配分析
Flush&Gap分析
四、三坐标高级应用案例
2.虚拟装配分析
Flush&Gap优化:软件对Flush&Gap按指定的约束进行优化, 并给出位移量(距离和角度),快速找到最佳安装位置
三坐标测量机
第二步 从这里用 鼠标单击 下拉菜单
从清单中选 择测座类型
41
产生测头文件
精选ppt
第三步 从清单中 选择测头 附件
42
产生测头文件
精选ppt
第四步 从清单中选 择相应的传 感器如: Tp20, Tp200 等
43
产生测头文件
精选ppt
第五步 从测头清单 中选择所用 的测杆,如 :4 *20 〔直 径、长度〕
15
精选ppt
〔2〕测头系统 测头是坐标测量机触测被测零件的发讯开关, 是
坐标测量机的关键部件,测头精度的上下决定了坐标 测量机的测量重复性。三坐标测量机的功能、工作效 率、精度与测头密切相关。三坐标测头的两大根本功 能是测微和触发瞄准。
16
精选ppt
测头的分类
– 按结构原理,测头可分为机械式、光学式和电气式。 – 按测量方法,测头可分为接触式和非接触式。
〔4〕测量软件
测量机本体只是提取零件外表空间坐标 点的工具。 测量机精度在很大程度上依赖 于软件。测量机软件成 为决定测量机性能 的主要因素。
测量软件从功能上可以分成以下几类:
① 通用测量软件
②专用测量评价软件
20
③附加功能软件
精选ppt
测量软件功能与应用的分类有以下几方面。
①箱体类零件 ②自由曲面类零件 ③特定形 面类零件 ④反求测量
建立零件坐标系时需要做三件事: 找正 (用任何元素的方向矢量〕。找正元素控制了工作平面的方向。 旋转坐标轴 (用所测量元素的方向矢量). 旋转元素需垂直于已找正的 元素。这控制着轴线相对于工作平面的旋转定位。 原点 (任意测量元素或将其设为零点的定义了X、Y、Z值的元素)。
61
精选ppt
从清单中选 择测座类型
41
产生测头文件
精选ppt
第三步 从清单中 选择测头 附件
42
产生测头文件
精选ppt
第四步 从清单中选 择相应的传 感器如: Tp20, Tp200 等
43
产生测头文件
精选ppt
第五步 从测头清单 中选择所用 的测杆,如 :4 *20 〔直 径、长度〕
15
精选ppt
〔2〕测头系统 测头是坐标测量机触测被测零件的发讯开关, 是
坐标测量机的关键部件,测头精度的上下决定了坐标 测量机的测量重复性。三坐标测量机的功能、工作效 率、精度与测头密切相关。三坐标测头的两大根本功 能是测微和触发瞄准。
16
精选ppt
测头的分类
– 按结构原理,测头可分为机械式、光学式和电气式。 – 按测量方法,测头可分为接触式和非接触式。
〔4〕测量软件
测量机本体只是提取零件外表空间坐标 点的工具。 测量机精度在很大程度上依赖 于软件。测量机软件成 为决定测量机性能 的主要因素。
测量软件从功能上可以分成以下几类:
① 通用测量软件
②专用测量评价软件
20
③附加功能软件
精选ppt
测量软件功能与应用的分类有以下几方面。
①箱体类零件 ②自由曲面类零件 ③特定形 面类零件 ④反求测量
建立零件坐标系时需要做三件事: 找正 (用任何元素的方向矢量〕。找正元素控制了工作平面的方向。 旋转坐标轴 (用所测量元素的方向矢量). 旋转元素需垂直于已找正的 元素。这控制着轴线相对于工作平面的旋转定位。 原点 (任意测量元素或将其设为零点的定义了X、Y、Z值的元素)。
61
精选ppt
关节臂式测量

一般来说关节臂测量机的精度比传统的框架式三坐标测量 机精度要略低,精度一般为10 微米级以上,加上只能手动,所 以选用时要注意应用场合。
(a)CimCore公司产品
(b)Romer公司产品
c)FARO公司产品
(d)ZETT MESS公司产品
工作原理 关节臂的工作原理主要是设备在空间旋转时,设
7自由度关节臂测量机
与传统的三坐标测量机相比,
关节臂式坐标测量机具有体积小、质量轻、便于携带、测 量灵活、测量空间大、环境适应性强、成本低等优点。被广泛应 用于航空航天、汽车制造、重型机械、轨道交通、产品检具制造、 零部件加工等多个行业。随着近30多年来的不断发展,该产品已 经具有三坐标测量、在线检测、逆向工程、快速成型、扫描检测、 弯管测量等多种功能。
实例对象为空调中隔板
物件的表面处理和着色
产品在数据采集之前需要进行表面处理,清理干净所有要进 行数据采集的表面,这样才能得到高精度有用的数据信息。原则 上ScanWorks扫描系统对模型没有着色要求,但是如果扫描的 模型是反射效果较为强烈的塑料、金属等材质,CCD无法正确捕 捉到反射回来的激光,无法正常进行扫描,特别是曲率变化较大 的部位,更容易丢失数据。扫描时可以通过喷施着色剂可增强模 型表面的漫反射,使CCD正常工作。
复杂的大型零件一般不能一次完成数据的扫描,可以转换 零件,从多个角度来完成数据的采集,然后再使用专业的软件进 行数据注册,拼接成一个完整的模型数据;利用蛙跳技术的帮助,
也可完成复杂的大型零件的扫描。
图a两次扫描数据
图b 注册后完整数据
保存并输出数据。 点云数据可以保存的类型: wrp是Geomagic Studio自带的一种文件格式,此格式可以保存点云阶 段、多边形阶段等各个阶段的数据文件; iges文件是一种三维软件几乎都能打开的通用格式; wrl是一种文本格式的文件,可以用文本编辑器打开编辑; u3d是3D通用图形的标准格式; obj文件一般是程序编译后的二进制文件,再通过链接器和资源文件链 接就成exe文件了; dxf是AutoCAD中的矢量文件格式,它以ASCII码方式存储文件,在表 现图形的大小方面十分精确。
(a)CimCore公司产品
(b)Romer公司产品
c)FARO公司产品
(d)ZETT MESS公司产品
工作原理 关节臂的工作原理主要是设备在空间旋转时,设
7自由度关节臂测量机
与传统的三坐标测量机相比,
关节臂式坐标测量机具有体积小、质量轻、便于携带、测 量灵活、测量空间大、环境适应性强、成本低等优点。被广泛应 用于航空航天、汽车制造、重型机械、轨道交通、产品检具制造、 零部件加工等多个行业。随着近30多年来的不断发展,该产品已 经具有三坐标测量、在线检测、逆向工程、快速成型、扫描检测、 弯管测量等多种功能。
实例对象为空调中隔板
物件的表面处理和着色
产品在数据采集之前需要进行表面处理,清理干净所有要进 行数据采集的表面,这样才能得到高精度有用的数据信息。原则 上ScanWorks扫描系统对模型没有着色要求,但是如果扫描的 模型是反射效果较为强烈的塑料、金属等材质,CCD无法正确捕 捉到反射回来的激光,无法正常进行扫描,特别是曲率变化较大 的部位,更容易丢失数据。扫描时可以通过喷施着色剂可增强模 型表面的漫反射,使CCD正常工作。
复杂的大型零件一般不能一次完成数据的扫描,可以转换 零件,从多个角度来完成数据的采集,然后再使用专业的软件进 行数据注册,拼接成一个完整的模型数据;利用蛙跳技术的帮助,
也可完成复杂的大型零件的扫描。
图a两次扫描数据
图b 注册后完整数据
保存并输出数据。 点云数据可以保存的类型: wrp是Geomagic Studio自带的一种文件格式,此格式可以保存点云阶 段、多边形阶段等各个阶段的数据文件; iges文件是一种三维软件几乎都能打开的通用格式; wrl是一种文本格式的文件,可以用文本编辑器打开编辑; u3d是3D通用图形的标准格式; obj文件一般是程序编译后的二进制文件,再通过链接器和资源文件链 接就成exe文件了; dxf是AutoCAD中的矢量文件格式,它以ASCII码方式存储文件,在表 现图形的大小方面十分精确。
关节活动度测定PPT课件
36
结果分析:
① ②
1、关节被动活动时,如果出现抵抗(称 运动终末感),应评定这种抵抗是生理性 的还是病理性的,同时应分析病理性抵抗 所导致逛街活动受限的原因。 2、生理性抵抗包括软组织性抵抗、结缔 组织性抵抗和骨抵抗。 软组织抵抗:由软组织之间接触所致 结缔组织性抵抗:有肌肉、关节囊、韧带 等牵张所致 骨抵抗:由骨与骨之间的接触所致
9
ROM测定的目的:
1. 确定有无关节活动障碍及障碍程度; 2. 确定治疗目标,为选择治疗方法提供参考; 3. 评价治疗训练效果。
10
测量工具1——普通量角器
普通量角器
也称通用量角器,是临床最常用的测量关节角度的器械。 移动臂,标有指针。 固定臂,附有刻度盘。 两臂以活动轴固定,轴为量角器中心。
16
上肢主要关节活动度的评定
关 节 肩 屈 伸 测角计放置方法 运动 受检体位 轴心 坐或立位,臂置于体 侧,肘伸直 肩峰 固定臂 与腋中线平 行 移动臂 与肱骨纵轴平行 屈0~180° 伸0~50° 正常值
外展
内旋 外旋 肘 屈 伸 旋前 旋后
坐和站位,臂置于体 侧,肘伸直
仰卧,肩外展 90°,肘屈90°
两个臂
使用通用量角器时,量角器轴心须与关节活动轴 心一致,两臂与关节两端肢体长轴平行。
11
测量工具
通用量角器
12
普通量角器用两根直尺连接一 个半圆量角器或全圆量角器制 成,手指关节用小型半圆角器 测量。使用时将量角器的中心 点准确对到关节活动轴中心 (参照一定的骨性标志),两 尺的远端分别放到或指向关节 两端肢体上的骨性标志或与肢 体长轴相平行。随着关节远端 肢体的移动,在量角器刻度盘 上读出关节活动度。
FAROArm关节臂测量操作指南PPT课件

关节 (6个)
操作键
探针
锂电池 数据接口 (USB) 电源接口
固1定0 底座
第二部分 FARO Arm 组成
2、关节
共有6个关节,每个关节内置位置传感器(光栅编码器),以实现探针球心的 精确定位;;
内置应力自动感应报警系统,保护关节。
注:测量时应使测量臂及各关节处于自由状态。
3、操作键基本功能
30 º、45 º、60 º、90 º、120 º、135º、150 º、180 º九个位置采点,每个角度位 置采10个点,一共九十个点,采点完成后按“向后” 按钮。
注:测量过程中,应保持探针紧贴标准锥;设备与校准锥固定良好,无相对漂移。 4
第一部分 FARO Arm 综述
2.1.3 结果判定
查看报告,(最大值-最小值)/2 不超过设备的单点精度即为合格。
4、探针
1 - 6 mm 球探针、1 - 3 mm 球探针(标配);传导探针等(选配) 校准器( 校准锥、校准球)。
5、数据接口
用于测量臂与计算机间的数据传输。
6、电池组
在无交流电源的场合使用 ,使用交流电源时拆下电池组; 安装电池组:将电池组向下滑动直至发出“咔哒”声; 电池组充电:当 FaroArm 插上交流电源时,无论开/关,电池组均开始
9
第二部分 FARO Arm 组成
一、测量臂(以FARO Arm Platinum 6轴为例)
功能:测量点的空间坐标值
部件组成
1、测量臂
• 内置平衡装置,测量时无需固定、把 持,只需握持最后一节臂进行测量;
• 内置温度传感器,定时测量臂内温 度,修正因温度变化造成的测量臂长 度的变化,保证测量准确度。
5
关节活动度测量

远近端协同旋转
肘部关节
屈曲、伸展ROM测量 :仰 卧或坐或立位,臂取解剖位, 轴心肱骨外上髁,固定臂 与肱骨纵轴平行,移动臂 与桡骨纵轴平行。
正常值:屈曲 0-1500 伸展 00 过伸展 0-100
肘部关节
旋前、旋后ROM测量 : 坐位,上臂置于体侧, 肘屈90°,前臂中立位, 轴心尺骨茎突,固定臂 与地面垂直,移动臂腕 关节背面(测旋前)或 掌面(测旋后)
测角计放置方法
轴心
固定臂
移动臂
正常值
掌指 屈伸
坐位, 腕中立位
指间 屈伸
拇指 内收 腕掌 外展
同上 同上
近节指骨近端
与掌骨平行
与近指骨 平行
伸0~20°,屈0~ 90°(拇指0~30°)
远侧指骨近端 腕掌关节
与近侧指骨 与远指骨
平行
平行
与食指平行
与拇指平 行
近指间为0~100° 远指间为0~80°
0~60°
肩部关节
内旋、外旋 ROM测量:仰 卧,肩外展90°,肘屈 90°,轴心鹰嘴,固定臂 与腋中线平行,移动臂与 前臂纵轴平行。
正常值:内旋 0-900 外旋 0-900
肘部关节
1、解剖及运动学概要 (1)骨骼:肱骨远端,桡骨、尺骨近端 (2)关节:肱尺关节、肱桡关节、桡尺近端关节 (3)运动:屈伸(5~10度过伸)
0~180°
与前臂纵轴平行 各0~90°
与肱骨纵 轴平行
与桡骨纵轴平 0~150° 行
与地面垂 直
腕关节背面 各0~90°
(测旋前)或 掌面(测旋后)
与前臂纵 轴平行
前臂背侧 中线
与第二掌骨纵 屈0~90°
轴平行
伸0~70°
肘部关节
屈曲、伸展ROM测量 :仰 卧或坐或立位,臂取解剖位, 轴心肱骨外上髁,固定臂 与肱骨纵轴平行,移动臂 与桡骨纵轴平行。
正常值:屈曲 0-1500 伸展 00 过伸展 0-100
肘部关节
旋前、旋后ROM测量 : 坐位,上臂置于体侧, 肘屈90°,前臂中立位, 轴心尺骨茎突,固定臂 与地面垂直,移动臂腕 关节背面(测旋前)或 掌面(测旋后)
测角计放置方法
轴心
固定臂
移动臂
正常值
掌指 屈伸
坐位, 腕中立位
指间 屈伸
拇指 内收 腕掌 外展
同上 同上
近节指骨近端
与掌骨平行
与近指骨 平行
伸0~20°,屈0~ 90°(拇指0~30°)
远侧指骨近端 腕掌关节
与近侧指骨 与远指骨
平行
平行
与食指平行
与拇指平 行
近指间为0~100° 远指间为0~80°
0~60°
肩部关节
内旋、外旋 ROM测量:仰 卧,肩外展90°,肘屈 90°,轴心鹰嘴,固定臂 与腋中线平行,移动臂与 前臂纵轴平行。
正常值:内旋 0-900 外旋 0-900
肘部关节
1、解剖及运动学概要 (1)骨骼:肱骨远端,桡骨、尺骨近端 (2)关节:肱尺关节、肱桡关节、桡尺近端关节 (3)运动:屈伸(5~10度过伸)
0~180°
与前臂纵轴平行 各0~90°
与肱骨纵 轴平行
与桡骨纵轴平 0~150° 行
与地面垂 直
腕关节背面 各0~90°
(测旋前)或 掌面(测旋后)
与前臂纵 轴平行
前臂背侧 中线
与第二掌骨纵 屈0~90°
轴平行
伸0~70°
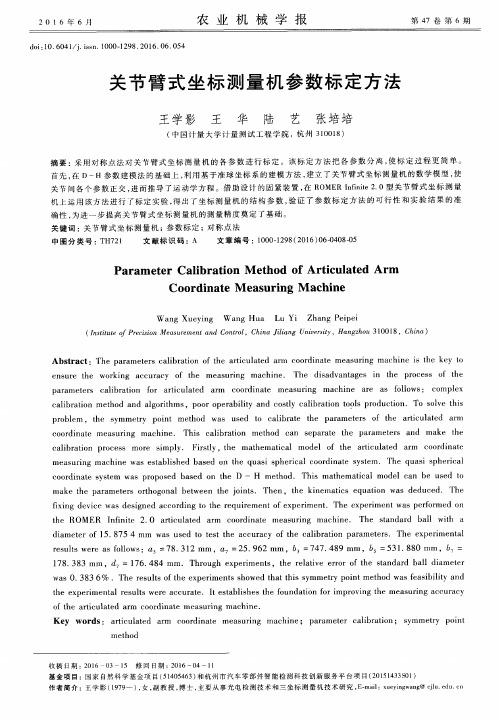
关节臂式坐标测量机参数标定方法
make the parameters orthogonal between the joints.Then,the kinematics equation was deduced.The
fixing device was designed according to the requirem ent of experiment. The experiment was performed on the ROM ER Inf inite 2.0 articulated arm coordinate measuring machine. The standard ball with a diam eter of 1 5.875 4 Him was used to test the accuracy of the calibration parameters. The experimental results were as follows:a :78.312 nlm ,a7= 25.962 mm , b3=747.489 mm ,b5=531.880 II1m ,b7= 178.383 mm ,d7= 176.484 mm . Through experim ents, the relative error of the standard ball diameter Was 0.383 6% . The results of the experiments showed that this sym metry point m ethod was feasibility and the experimental results were accurate. It establishes the foundation for im proving the m easuring accuracy of the articulated arm coordinate measuring m achine. K ey w ords: articulated arm coordinate measuring machine; param eter calibration; symm etry point
fixing device was designed according to the requirem ent of experiment. The experiment was performed on the ROM ER Inf inite 2.0 articulated arm coordinate measuring machine. The standard ball with a diam eter of 1 5.875 4 Him was used to test the accuracy of the calibration parameters. The experimental results were as follows:a :78.312 nlm ,a7= 25.962 mm , b3=747.489 mm ,b5=531.880 II1m ,b7= 178.383 mm ,d7= 176.484 mm . Through experim ents, the relative error of the standard ball diameter Was 0.383 6% . The results of the experiments showed that this sym metry point m ethod was feasibility and the experimental results were accurate. It establishes the foundation for im proving the m easuring accuracy of the articulated arm coordinate measuring m achine. K ey w ords: articulated arm coordinate measuring machine; param eter calibration; symm etry point
关节活动度评定课件
3.旋转 关节在水平面内绕着垂直轴转动。向内或向前转动称 内旋或旋前,向外或向后转动称外旋或旋后,如肩关节和 髋关节的内旋和外旋,前臂的旋前和旋后。
4.翻转 指踝和足的联合运动。足底向内侧转动,足的内侧缘 抬起为内翻;足底向外侧转动,足的外侧缘抬起为外翻。
(五)关节的稳定性和灵活性
(六)关节运动的类型
1.屈和伸 关节在矢状面绕着额状轴运动。如果关节的远端向 近端接近,关节之间的夹角变小为屈。反之,离开近端, 夹角变大则为伸。关节过伸是指关节在标准解剖位以外的 运动,如肘关节和膝关节均有一定度数的过伸。
2.内收和外展 关节在额状面内绕着矢状轴运动。如果关节的 远端接近身体的中线为内收,离开身体中线则为外展,如 肩关节的内收和外展。
康复功能评定学
关节活动度的评定
第一节 概述
• 关节是指两块或两块以上骨之间的连接部 分。关节活动度(range of motion, ROM) 是指一个关节从起始端至终末端的正常运 动范围(即运动弧)。关节活动度评定是 针对一些引起关节活动受限的身体功能障 碍性疾病的首要评定过程,如关节炎、骨 折、烧伤以及手外伤等。
长轴平行,移动臂与腓骨长轴平行。 • 图10-46膝关节(A)伸展;(B)屈曲 3.踝关节活动度 (1)踝关节背屈(0°~20°,见图10-47) • 体位:仰卧位或坐位(坐位时膝关节屈曲90°),踝关节
处于中立位。 • 量角器摆放:轴心位于踝中点下约2.5cm,固定臂与腓骨
2.根据关节面的形状 可分为滑车关节、圆柱关节、 椭圆关节、鞍状关节、球窝关节和平面关节
(三)滑膜关节的分类
• 滑车关节/屈戌关节: • 车轴关节/圆柱关节 • 椭圆关节 • 鞍状关节 • 球窝关节 • 平面关节:
(三)滑膜关节的分类
4.翻转 指踝和足的联合运动。足底向内侧转动,足的内侧缘 抬起为内翻;足底向外侧转动,足的外侧缘抬起为外翻。
(五)关节的稳定性和灵活性
(六)关节运动的类型
1.屈和伸 关节在矢状面绕着额状轴运动。如果关节的远端向 近端接近,关节之间的夹角变小为屈。反之,离开近端, 夹角变大则为伸。关节过伸是指关节在标准解剖位以外的 运动,如肘关节和膝关节均有一定度数的过伸。
2.内收和外展 关节在额状面内绕着矢状轴运动。如果关节的 远端接近身体的中线为内收,离开身体中线则为外展,如 肩关节的内收和外展。
康复功能评定学
关节活动度的评定
第一节 概述
• 关节是指两块或两块以上骨之间的连接部 分。关节活动度(range of motion, ROM) 是指一个关节从起始端至终末端的正常运 动范围(即运动弧)。关节活动度评定是 针对一些引起关节活动受限的身体功能障 碍性疾病的首要评定过程,如关节炎、骨 折、烧伤以及手外伤等。
长轴平行,移动臂与腓骨长轴平行。 • 图10-46膝关节(A)伸展;(B)屈曲 3.踝关节活动度 (1)踝关节背屈(0°~20°,见图10-47) • 体位:仰卧位或坐位(坐位时膝关节屈曲90°),踝关节
处于中立位。 • 量角器摆放:轴心位于踝中点下约2.5cm,固定臂与腓骨
2.根据关节面的形状 可分为滑车关节、圆柱关节、 椭圆关节、鞍状关节、球窝关节和平面关节
(三)滑膜关节的分类
• 滑车关节/屈戌关节: • 车轴关节/圆柱关节 • 椭圆关节 • 鞍状关节 • 球窝关节 • 平面关节:
(三)滑膜关节的分类
3.关节臂式测量 PPT课件

广东工业大学
激光扫描操作流程
物件的表面处理和着色 连接测量系统 关节臂的初始化 扫描采集数据 根据需要保存并输出数据
广东工业大学
关节臂测量机激光扫描检测实例
实例对象为空调中隔板
广东工业大学
物件的表面处理和着色 产品在数据采集之前需要进行表面处理,清理干净所有要进
行数据采集的表面,这样才能得到高精度有用的数据信息。原则 上ScanWorks扫描系统对模型没有着色要求,但是如果扫描的 模型是反射效果较为强烈的塑料、金属等材质,CCD无法正确捕 捉到反射回来的激光,无法正常进行扫描,特别是曲率变化较大 的部位,更容易丢失数据。扫描时可以通过喷施着色剂可增强模 型表面的漫反射,使CCD正常工作。
广东工业大学
按照“顺着特征线走,沿着法线方向扫”的原则,从各个 角度和方位完成对数据的扫描。一般来说,期间需要暂停或者停 止扫描,以观察扫描点云质量如何,同时观察哪些部位数据还没 有扫到,决定是否需要继续或者追加扫描数据。要想接上次数据 追加扫描,则需点击软件上的追加扫描图标,直到将数据扫描完 毕。
6自由度关节臂测量机
7自由度关节臂测量机
广东工业大学
与传统的三坐标测量机相比, 关节臂式坐标测量机具有体积小、质量轻、便于携带、测
量灵活、测量空间大、环境适应性强、成本低等优点。被广泛应 用于航空航天、汽车制造、重型机械、轨道交通、产品检具制造、 零部件加工等多个行业。随着近30多年来的不断发展,该产品已 经具有三坐标测量、在线检测、逆向工程、快速成型、扫描检测、 弯管测量等多种功能。
一般来说关节臂测量机的精度比传统的框架式三坐标测量 机精度要略低,精度一般为10 微米级以上,加上只能手动,所 以选用时要注意应用场合。
广东工业大学
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
广东工业大学
按照“顺着特征线走,沿着法线方向扫”的原则,从各个 角度和方位完成对数据的扫描。一般来说,期间需要暂停或者停 止扫描,以观察扫描点云质量如何,同时观察哪些部位数据还没 有扫到,决定是否需要继续或者追加扫描数据。要想接上次数据 追加扫描,则需点击软件上的追加扫描图标,直到将数据扫描完 毕。
广东工业大学
在扫描过程中,关节臂的激光发射器与相应零件区域保持 在150 mm左右,使测量机达到最佳的数据输入状态。如果两者 的距离过近或过远,系统将透过距离探测显示和声音来提示,绿 色指示条显示在2/3位置为佳,可以根据绿色指示条位置和扫描 时发出的声音来调整激光头和物体表面的位置,以得到最佳的扫 描效果。
广东工业大学
(7)报告输出。 一般报告中需显示图片,以增加报告的生动性。
先将图形窗口摆放到适当的位置,并把图形上的特征 标识符调整到合适的位置。
广东工业大学
广东工业大学
广东工业大学
18:30: 材料成型及控制工程 测控技术与仪器 电气工程及其自动化 电子科学与技术 给水排水工程 工程管理 光信息科学与技术 化学工程与工艺
广东工业大学
19:00 环境工程 计算机科学与技术 交通运输 金属材料工程 软件工程 生物工程 食品科学与工程 统计学 土木工程
广东工业大学
19:30 网络工程 微电子学 信息工程 应用化学 制药工程 自动化
广东工业大学
激光扫描操作流程
物件的表面处理和着色 连接测量系统 关节臂的初始化 扫描采集数据 根据需要保存并输出数据
广东工业大学
关节臂测量机激光扫描检测实例
实例对象为空调中隔板
广东工业大学
物件的表面处理和着色 产品在数据采集之前需要进行表面处理,清理干净所有要进
行数据采集的表面,这样才能得到高精度有用的数据信息。原则 上ScanWorks扫描系统对模型没有着色要求,但是如果扫描的 模型是反射效果较为强烈的塑料、金属等材质,CCD无法正确捕 捉到反射回来的激光,无法正常进行扫描,特别是曲率变化较大 的部位,更容易丢失数据。扫描时可以通过喷施着色剂可增强模 型表面的漫反射,使CCD正常工作。
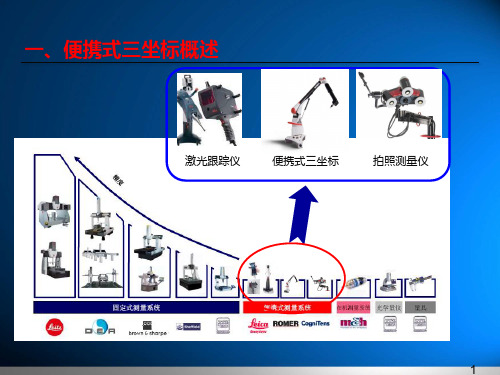
关节臂测量机
杨雪荣
广东工业大学
教学要求: 了解关节臂测量机结构、原理 了解关节臂测量机主要功能 了解关节臂测量机测量方法
广东工业大学
关节臂测量机的定义: 关节臂测量机仿照人体关节结构,以角度基准取
代长度基准,由几根固定长度的臂通过绕互相垂直轴 线转动的关节(分别称为肩、肘和腕关节)互相连接, 在最后的转轴上装有探测系统的坐标测量装置。
死角较少,对被测物体表面无特殊要求
广东工业大学
激光扫描测头——实现密集点云数据的采集,用于逆向工程和 CAD对比检测
Perceptron公司的 ScanWorks V系列激 光扫描头
Romer公司的 G-Scan系列
FARO公司的ScanArm V2、ScanArm V3系列
广东工业大学
优点:
广东工业大学
关节臂式坐标测量机是一种新型的非正交坐标测量机,每个臂的 转动轴或者与臂轴线垂直,或者绕臂自身轴线转动,一般用三条 横线“-”来表示肩、肘和腕的转动自由度,例如图3.1和3.2分别 表示的2-2-2、2-2-3配置的关节臂测量机,为了适应当前情况, 一般关节数为不大于7的手动测量机。
广东工业大学
(5)基本元素的测量。 在软件界面,把测量模式切换成“自动测量”模
式,用自动特征在CAD模型上分别测量圆1、圆2、圆 3、圆4、圆5和圆柱体1、圆柱体2,平面2,得出上述 特征的理论值,然后选择自动测量生成的程序,单击 鼠标右键,点击“执行块”,如图3.33所示,根据弹 出提示对话框手动测量上述特征(图3.34),得到上 述特征的实测值,最终测量的结果如图3.35所示。
测量模型
广东工业大学
(1)固定好机器。
若机器置于金属的工作台上,建议选用磁力底座(图a),也可使 用卡钳进行固定(图b);如为非金属工作台,建议使用卡钳进行 固定;而在工厂现场测量建议采用三角架固定方式(图c)。
(a)磁力底座 (b)卡钳 (c)三脚架
广东工业大学
(2)新建程序
命名零件名,修订号和序列号可以不填,然后选择测量单 位,点击“确定”,完成程序新建。如图所示。
广东工业大学
关节臂的初始化 运行关节臂初始化程序,设备将进行整个系统的
连接和初始化工作,从设备主机到各个关节的连接检 测,检测6个关节的响应,保证数据传输正常,。
如果是首次使用关节臂测量机或者是需要对激光 扫描头进行校准 。
广东工业大学
扫描采集数据 启动Geomagic Studio软件进行数据采集 ,按照
一般来说关节臂测量机的精度比传统的框架式三坐标测量 机精度要略低,精度一般为10 微米级以上,加上只能手动,所 以选用时要注意应用场合。
广东工业大学
(a)CimCore公司产品
广东工业大学
(b)Romer公司产品
广东工业大学
c)FARO公司产品
广东工业大学
(d)ZETT MESS公司产品
广东工业大学
“顺着特征线走,沿着法线方向扫”的原则,从各个 角度和方位完成对数据的扫描。
广东工业大学
把模型放在可扫描范围之内,在扫描过程中不能移动物体, 按下手持部位的红色按钮,激光发射器将发出线激光到物体表面, 激光返回到接收器,通过关节臂数据传感器传输数据到控制器, 然后传输到计算机界面,显示扫描的动态实时过程。
广东工业大学
(3)导入数模
在有CAD数模的情况下才执行这步。从“文件”→“导 入”→“IGES”从放置数模的文件夹下选则模型文件”,点击 “导入”→“处理”→“确定”,然后对线框模型实体化,最终 导入的模型如图所示。
广东工业大学
坐标系的建立
典型的“3-2-1”法建立坐标系有三步:用平面的法矢量确定 第一轴向;用直线的矢量确定第二轴向;用面、线、点确定三个 轴向的原点。没有CAD模型情况下,根据图纸设计基准建立零件 坐标系;有CAD模型情况下,建立和CAD模型完全相同的坐标 系,需点击CAD=PART,使模型和零件实际摆放位置重合。
广东工业大学
图 空调中隔板多边形数据模型
广东工业大学
PC-DIMS工件检测流程
PC-DIMS工件检测流程 固定好机器 选择测头、系统连接 固定好工件 开启机器电源开关,对机器进行复位 建立零件坐标系 进行检测项目元素的测量 进行形状、位置公差评价 输出检测报告
广东工业大学
基于PC-DIMS关节臂零件检测实例
广东工业大学
(6)尺寸评价。
本实例用的上的尺寸评价功能有“位置”、“同心度”、 “同轴度”、“平行度”、“垂直度”。对于零件上的每一特征 对象,一般图纸上都给出了尺寸公差和形位公差,尺寸公差就是 某特征单一尺寸的允许变化范围,它给出了一个尺寸合格的条件; 而形位公差约束了零件某一对象的形状和置误差,比如平面的平 整度(平面度)、两个平面的垂直度等。
广东工业大学
联接测量系统 将测量机主体安装在磁力底座
或者固定架上,按照系统联接规 范,用各种数据线将机器设备、 计算机、控制器连接起来。连接 完成后检查各种数据线,启动控 制器、主机电源开关,再启动计 算机和相关程序。启动数据盒开 关进行预热5min后,当激光头开 关旁边的ready指示灯亮,就可以 启动激光头开关,进入初始化阶 段。
工作原理 关节臂的工作原理主要是设备在空间旋转时,设
备同时从多个角度编码器获取角度数据,而设备臂长 为一定值,这样计算机就可以根据三角函数换算出测 头当前的位置,从而转化为XYZ的形式。
广东工业大学
测头 触发式测头 扫描寸检测和点云数据的采集; 优点:超轻重量,可移动性好,便于移动运输;精度较高,测量范围大,
速度快,采样密度高,适用面广; 对被测物体大小和重量无特别限制,适用于柔软物体扫描; 操作方便灵活,死角少,柔性好; 维护容易,环境要求低,抗干扰性强; 特征测量和扫描测量可结合使用。
广东工业大学
红外线弯管测头——可实现弯管参数的检测,从而修正弯管机执 行参数。
广东工业大学
关节臂测量机系统组成 主机系统 激光测头系统 计算机系统 软件系统
6自由度关节臂测量机
7自由度关节臂测量机
广东工业大学
与传统的三坐标测量机相比, 关节臂式坐标测量机具有体积小、质量轻、便于携带、测
量灵活、测量空间大、环境适应性强、成本低等优点。被广泛应 用于航空航天、汽车制造、重型机械、轨道交通、产品检具制造、 零部件加工等多个行业。随着近30多年来的不断发展,该产品已 经具有三坐标测量、在线检测、逆向工程、快速成型、扫描检测、 弯管测量等多种功能。
广东工业大学
的完整点云数据。
复杂的大型零件一般不能一次完成数据的扫描,可以转换 零件,从多个角度来完成数据的采集,然后再使用专业的软件进 行数据注册,拼接成一个完整的模型数据;利用蛙跳技术的帮助, 也可完成复杂的大型零件的扫描。
图a两次扫描数据
图b 注册后完整数据
广东工业大学
保存并输出数据。 点云数据可以保存的类型: wrp是Geomagic Studio自带的一种文件格式,此格式可以保存点云阶 段、多边形阶段等各个阶段的数据文件; iges文件是一种三维软件几乎都能打开的通用格式; wrl是一种文本格式的文件,可以用文本编辑器打开编辑; u3d是3D通用图形的标准格式; obj文件一般是程序编译后的二进制文件,再通过链接器和资源文件链 接就成exe文件了; dxf是AutoCAD中的矢量文件格式,它以ASCII码方式存储文件,在表 现图形的大小方面十分精确。