第八章 交通流分配电子教案
第八章_交通分配

在交通分配理论中,以 Wardrop第一原理为基本 指导思想的分配方法比较多。国际上通常将交通 分配方法分为平衡分配和非平衡分配两大类。
对于完全满足Wardrop原理定义的平衡状态,则称 为平衡分配方法;
对于采用启发式方法或其他近似方法的分配模型 ,则称为非平衡分配方法。
【例题】
设OD之间交通量为q=2000辆,有两条径路a与b。径 路a行驶时间短,但是通过通行能力小,径路b行驶 时间长,但通行能力大。假设各自的行驶时间( min)与流量的关系:
ta t0[1 (Va / ca ) ]
零流阻抗
实际通行能力
2.节点处的阻抗
节点处的阻抗是指车辆在交通网络节点处主要指在交叉口处的 阻抗。交叉口阻抗与交叉口的形式、信号控制系统的配时、交 叉口的通过能力等因素有关。在城市交通网络的实际出行时间 中,除路段行驶时间外,交叉口延误占有较大的比重,特别是 在高峰期间,交叉口拥挤比较严重时,交叉口延误可能会超过 路段行驶时间。
1、交通小区划分 交通调查和规划前,需要先将规划区域划
分成若干交通小区。是进行现状OD调查和 未来OD预测的基础。 2、交通网络的组成 在城市交通规划中,主要对快速路、主干 道、次干转换
交通小区和网络确定后,需要将小区间OD量作用点转移到与该 小区质心比较靠近的交通网络节点上。
当饱和度较大 x>0.67 时,该公式不再适用
已有的城市道路交通分配理论一直忽略节 点阻抗这个问题,借用从城市间公路上获 得的行驶时间的BPR函数作为城市道路网上 的阻抗,只计算路段上的阻抗。
三、路径与最短径路
1.路段 交通网络上相邻两个节点之间的交通线路称作“路段”。
2.路径 交通网络上任意一OD点对之间,从发生点到吸引点一串连 通的路段的有序排列叫做这一OD点对之间的路径。一个OD 点对点之间可以有多条路径。
交通流分配
19586 Charnes & Cooper 1959 Charnes & Cooper
1963 Jorgensen
1965 1966
1968
Overgaard Jewell
Braess
除了 Studies之外的相关研究
Charnes and Cooper (1958) 按照总路段流的积分函 数形式,提出了固定需求下交通网络均衡配流模型。后 来,他们利用求解线性规划的方法,针对费用函数的分 段线性形式,给出求解小规模网络下的模型算法。
• 2005年9月, WorldCat List of Records 的研究表明,全 世界373个图书馆收藏了Studies ,13个图书馆拥有该书 的兰德版本。7个图书馆拥有该书的西班牙版本。
• 2005年10月通过Web of Science 搜索发现,321篇文章引 用了Studies
Studies出版之前有关 网络均衡的研究
Knight
1924
Duffin 1947
Nash Wardrop
Prager
1951 1952
1954
1956
相关研究
• Knight (1924) 描述了一个包含两条路径的路网中的均衡和有效性 条件,同时纠正了Pigou(1918)文中的一个错误。
• “Suppose that between two points there are two highways, one of which is broad enough to accommodate without crowding all the traffic which may care to use it, but is poorly graded and surfaced, while the other is a much better road, but narrow and quite limited in capacity. If a large number of trucks operate between the two termini and are free to choose either of the two routes, they will tend to distribute themselves between the roads in such proportions that the cost per unit of transportation, or effective returns per unit of investment, will be the same for every truck on both routes. As more trucks use the narrower and better road, congestion develops, until a certain point it becomes equally profitable to use the broader but poorer highway.”
第八讲交通流分配

有标上P标号的点{j},修改它们的T标号:
Tk(j)=min[T(j),P(i)+dij]
式中, dij——i到j的距离(路权);
T(j)——第K步标号前j点的T标号。
在所有的T标号(包括没有被修改的)中,比选出最小的T标号Tk(j0):
在所有T标号中,节点6为最小,给节点6标上P标号,即
P(6)= T6(6)=4。
•
步骤7:节点6刚得到P标号。节点9与6相邻,且为T标
号,修改9的T标号:
• T7(9)=min[T(9),P(6)+d69]=min[∞,4+2]=6
•
在所有T标号中,节点7为最小,给节点7标上P标号,
即P(7)= T4(7)=4。
T5(8)=min[T(8),P(5)+d58]=min[∞,3+2]=5
在所有T标号中,节点3为最小,给节点3标上P标号,即
P(3)= T3(3)=4。
步骤6:节点3刚得到P标号。节点6与3相邻,且为T标号,
修改6的T标号:
T6(6)=min[T(6),P(3)+d36]=min[4,4+2]=4
Tk(j0)=min[Tk(j),T(r)]
式中, j0——最小T标号所对应的节点;
T(γ)——与i点不相邻点r的T标号。
给点j0标上P标号:P(j0)= Tk(j0),第K步标号结束。
步骤3 当所有节点中已经没有T标号,算法结束,得到从起点1到其它各点
的最短路权;否则返回第二步。
例题8.1
用Dijkstra法计算图7-1所示路网从节点1到各
② 小的道路交叉点不作节点考虑,而在与之
第八章 交通流分配

第二节 交通流分配基本概念
二、交通阻抗 交通阻抗直接影响到交通流路径的选择和流量的分配。道 路阻抗在交通分配中可以通过路阻函数描述,所谓路阻函 数是指路段行驶时间与路段交通负荷,交叉口延误与交叉 口负荷之间的关系。在具体分配过程中,由路段行驶时间 及交叉口延误共同组成出行交通阻抗。(路段行驶时间与 路段交通负荷或者交叉口延误与交叉口之间的函数关系)
第八章 交通流分配
回顾
交通需求分析中最基本的部分之一,
发
本阶段的目的是求出研究对象地区的
生
交通需求总量,即生成交通量。并在
与 吸
此约束下求得各交通小区的发生与吸
引
引交通量。
回顾
交
将第一步所得各小区发生与吸引交通
通
量利用守恒原则和预测模型,变换为
的
小区之间的空间出行量,即分布交通
分 布
量(OD矩阵)
d17 +d75 ,d18 +d85 ,d19 +d95 ] =min[0+∞,2+2,∞+∞,2+1,∞+0,∞+1,∞+∞,∞+2,∞+∞]=3
(i=1,j=5;k=1,2…9)
第二节 交通流分配基本概念
经过三步到达某一节点的最短距离为 D3 = D2*D=[d3ij ] [d3ij ] =min[d2ik +dkj ]
算法举例 标号法、矩阵迭代法 、Floyd-Warshall法
第二节 交通流分配基本概念
标号法 (算法思想、步骤见P178-179) 例题8-1 用标号法计算路网从节点1到节点9的最短径路。
第二节 交通流分配基本概念
1. 给定起点1 的P标号:P[1]=0,其他节点标上T标号: T1(2)=‥‥=T1(9)
交通流分配

对于公路行驶时间函数的研究,被广泛应用的是由美国 道路局(Bureau of Public Road,BPR)开发的函数,被称 为BPR函数,形式为: q β
t a = t 0 [1 + α (
a
ca
) ]
式中:ta:路段a上的阻抗; t0 :零流阻抗,即路段上为空静状态时车辆自由行驶所 需要的时间; qa :路段a上的交通量; ca :路段a的实际通过能力,即单位时间内路段实际可通 过的车辆数; a、b :阻滞系数,在美国公路局交通流分配程序中,a 、b 参数的取值分别为a=0.15、b=4。也可由实际数据用 回归分析求得。
【例题8-1】计算下图 8-2 所示路网从节点1到节 点9的最短径路。
1 2 4 2 1 2 2 2 5 1 2 2 2 2 6 3
7
2
8
2
9
从图上可以看出,从节点1到节点9的最短径路 为:1—4—5—6—9;最短路权为6。
四、交通平衡问题 (一)Wardrop平衡原理 如果两点之间有很多条道路而这两点之间的交通量 又很少的话,行驶车辆显然会沿着最短的道路行走。 随着交通量的增加,最短径路上的交通流量也会随之 增加。增加到一定程度之后,这条最短径路的行驶时 间会因为拥挤或堵塞而变长,最短径路发生变化,这 一部分行驶车辆将会选择新的行驶时间次短的道路。 随着两点之间的交通量继续增加。两点之间的所有道 路都有可能被利用。
二、交通阻抗 交通阻抗(或者称为路阻)是交通流分配中经常提 到的概念,也是一项重要指标,它直接影响到交通流 径路的选择和流量的分配。 道路阻抗在交通流分配中可以通过路阻函数来描述 ,所谓路阻函数是指路段行驶时间与路段交通负荷, 交叉口延误与交叉口负荷之间的关系。在具体分配过 程中,由路段行驶时间及交叉口延误共同组成出行交 通阻抗。
交通规划-第八章分配交通量概要
14
二、非平衡分配方法
全有全无分配法(All-or-nothing Assignment Method) 不考虑交通量对路阻的影响,取路阻为常数。 分配思路:把OD交通量全部(all)分配到该OD对的最短 路径上,其余路径不分配任何交通量(nothing) 计算步骤 初始化,求出自由流状态下所有路段的阻抗; 计算各OD之间的最短路径; 将OD交通量全部分配到相应的最短径路上。 其他分配方法的基本子程序 每次改变路段上的交通量后,重新计算路段阻抗和最 短路径,(对一定的OD交通量)反复进行全有全无分配
q1
q2
21
三、平衡分配方法
Beckmann交通平衡模型:
min Z(x)
xa 0
ta
(
)d
a
subject to
k
f
rs k
qrs
f
rs k
0
各路段阻抗函数积分和最小化
交通流守恒:
各路径交通量之和等于OD交通量
路径流量非负
其中,路段交通量 xa
f rs rs k a,k
r sk
18
三、平衡分配方法
c1=5+0.1f1 q=f1+f2=100辆
路径1
用户平衡的模型化
c2=10+0.025f2
路径2
Wardrop第一原理:同一OD对间所有被利用路径的旅 行时间相等,且不大于其他未被利用路径的旅行时间
平衡条件
c1 min(c1, c2 ) c1 min(c1, c2 )
15
二、非平衡分配方法
增量分配法(Incremental Assignment Method) 考虑交通量对路阻的影响。 分配思路:逐次分配部分OD交通量,根据路网流动状 况,决定下次分配的最短路径 将OD表分为若干个份(等分或不等分),每次分配一份 每份OD表分配前,重新计算路网上各路段的阻抗和 各OD对的最短径路 每份OD表均按全有全无法分配到相应的最短路径上
交通规划交通流分配

第1节 概述
交通流分配的应用
将现状OD交通量分配在现状交通网络上
分析目前交通网络的运行状况 检验四阶段预测模型的精度
将规划年OD交通量分配在现状交通网络上
为规划年交通网络的规划设计提供依据
将规划年OD交通量分配在规划年交通网络
上
评价交通网络规划方案的合理性
江苏大学汽车与交通工程学院
组成:
路段上的阻抗 + 节点处的阻抗
影响因素
交通时间、交通安全、交通成本、舒适程度、 便捷性、准时性等
江苏大学汽车与交通工程学院
路段阻抗 一般形式
BPR函数
第2节 交通流分配中的基本概念
阻 抗
路段a上的 交通量
ta = f (xa )
路段a上的 交通量
=ta
t0[1
+
α
(
qa ca
需先将 OD 表分解成 N 个分表 (N 个分层 ) , 分 N 次使用最短路分配方法,
每次分配一个 OD 分表,
每分配一次,路阻就根据路阻函数修正一次,
直到把 N 个 OD 分表全部分配到路网上。
江苏大学汽车与交通工程学院
第3节 非平衡分配方法
二、增量分配法
算法思想
将 OD 交通量分成若干份(等分或不等分); 循环地分配每一份的 OD 交通量到网络中; 每次循环分配一份 OD 交通 量到相应的最短径路 上; 每次循环:
点方位和径路走向的数学描述
求最短径路算法中不能一般地表达不同流
向车辆在交叉口的不同延误。
城市道路交通流分配理论一直忽略节点阻
抗问题
路段阻抗借用BPR函数
江苏大学汽车与交通工程学院
第8章 交通流分配(基本概念)pdf

矩阵迭代法例题:
d215=min[d11+d15,d12+d25,d13+d35,d14+d45,d15 +d55,d16+d65,d17+d75,d18+d85,d19+d95] =min[0+∞,2+2,∞+∞,2+1,∞+0,∞+1, ∞+∞,∞+2,∞+∞]=3 (i=1,j=5;k=1,2„9)
路段上的 阻抗
交叉口处的 阻抗
第2节 交通流分配的基本概念
(1)路段交通阻抗 ——BPR函数
ta ---- 路段a上的阻抗; t 0 ---- 零流阻抗,即路段上为空静状态时车辆自由行驶 所需要的时间; xa ---- 路段a上的交通量; Ca ---- 路段a的通行能力,即单位时间内路段实际可通过 的车辆数; 、:-----阻滞系数。在美国公路局交通分配程序中, 、参数的取值分别为 =0.15、=4。也可由实际数据 用回归分析求得。
1 1 径路
q
O
q2 2 径路 qn n 径路
D
输出结果: 先决条件: • 交通需求函数; • 路 段 交 通 量 ; 为交通网络的设计、评价、 • 服务水平。 • 交通网络; 优选、改进等提供依据 • 路阻函数。
2
第1节 概述——路径选择原则
路径选择原则是指出行者在选择出行路径时所 遵循的行为准则。 交通网络的实际状态是每个出行者路径选择的 结果,能否准确地描述出行者路径选择行为, 是交通分配问题的核心。 出行者往往以出行成本(阻抗)最小作为标准 来选择路径。对于出行成本与流量无关的交通 网络,描述路径选择行为较为简单;而对道路 交通网络来说,出行成本与流量是相关的,这 使问题变得更困难。
第八章_交通分配分析

进行交通分配时所需要的基本数据有:
(1)表示需求的OD交通量出行矩阵。在拥挤的城市道路网中通常采用 高峰期OD交通量出行矩阵,在城市间公路网中通常采用年平均日交通量 (AADT)的OD交通量出行矩阵 ;
第一节 交通流分配中的基本概念 第二节 平衡分配法 重点内容 第三节 非平衡分配法 重点内容 第四节 随机分配法 第五节 动态交通流分配法
第一节 基本概念
交通分配(assignment)相关概念
一、交通流分配定义
就是将预测得出的OD交通 量,根据已知的道路网描述, 按照一定的规则分配到路网中 的各条道路上去,进而求出路 网中各路段的交通流量,并据 此对城市交通网络的使用状况 做出分析和评价。
其二,几乎所有的影响路阻的其他因素都与交通时间密切相关,且 呈现出与交通时间相同的变化趋势;
其三,交通时间比其他因素更易于测量,即使有必要考虑到其他因 素,也常常是将其转换为时间来度量。
交通阻抗由两部分组成:路段上的阻抗和节点处的阻抗。
1.路段上的阻抗
在诸多交通阻抗因素中,时间因素最主要。对于单种交通网 络,出行者在进行路径选择时,一般以时间最短为目标。有些交 通网络,路段上的行驶时间与距离成正比,与路段上的流量无关 ,如城市轨道交通网。此时用时间或距离作为阻抗是等价的,为 了量测方便起见,选用路段的距离较好。有些交通网络,如公路 网、城市道路网,路段上的行驶时间与距离不一定成正比,而与 路段上的交通流量有关,此时就选用时间作为阻抗。这类行驶时 间 与距离、流量的关系比较复杂,这种关系可以广义地表达为 :
ta f (V )
即路段 a 上的费用 ta 不仅仅是路段本身流量的函数,而且是整个 路网上流量 V 的函数。这个一般化的公式在城市道路网上是比较 多见的,因为交叉口的存在,不同路段上的流量会相互影响。
第八章_交通分配.

这条定义通常简称为Wardrop平衡(Wardrop Equilibrium), 在实际交通分配中也称为用户均衡 ( User Equilibrium , UE) 或用户最优。没有达到平衡状态时,会有一些道路使用者通过 变换路线来缩短行驶时间直至平衡。即,路段流量(拥挤)和出 行费用同时为出行者所考虑的因素,是平衡形成的条件。
??
1952 年 , Wardrop 提 出了交通网络平衡定 义的第一原理和第二 原理,奠定了交通分 配的基础。
Wardrop提出的第一原理定义是:在道路的使用者都确切知
道网络的交通状态并试图选择最短路径时,网络将会达到平衡 状态。在考虑路段流量对行驶时间影响的网络中,当网络达到 平衡状态时,每个OD对的各条被使用的路径具有相等而且最小 的 行驶时间;没有被使用的路径的行驶时间大于或等于最小 行驶时间 。
第一节 交通流分配中的基本概念 第二节 平衡分配法 重点内容
第三节 非平衡分配法 重点内容
第四节 随机分配法
第五节 动态交通流分配法
第一节
基本概念
交通分配(assignment)相关概念
一、交通流分配定义
就是将预测得出的 OD 交通 量,根据已知的道路网描述, 按照一定的规则分配到路网中 的各条道路上去,进而求出路 网中各路段的交通流量,并据 此对城市交通网络的使用状况 做出分析和评价。
ta f (Va )
即路段的费用只与该路段的流量及特性相关,这个假定简化 了对路段函数的建立和标定,以及交通流分配模型的开发。 对于公路行驶时间函数的研究,既有通过实测数据进行回归 分析的,也有进行理论研究的。其中被广泛应用的是由美国 道路局 (Bureau of Public Road , BPR) 开发的函数,被称为 BPR函数,形式为:
交通运输规划第八章交通分配
PPT文档演模板
交通运输规划第八章交通分配
(1)邻接矩阵
PPT文档演模板
(2)邻接目录表 采用两组数组表示网络的邻接关系: a、R(i),表示与i节点相连接的边的条数; b、V(i,j),表示与i节点相邻接的第j个节Biblioteka 择运行线路。PPT文档演模板
交通运输规划第八章交通分配
n 就城市道路网来说需要特别指出的是: n (1)出行分布量一般是指以标准小汽车为单位的
机动车的分配,人 车; n (2)不包括固定线路行驶的车辆; n (3)以后讨论的分配方法同样适用于出行个体对
固定线路运行的交通线路和工具的选择。
PPT文档演模板
n Vehicle trips from one zone to another are assigned to specific travel routes between zones.
n This assignment is done on the basis of minimum generalized cost (最小的通用费用) of travel between each O-D pair of zones -但并不 表示路径唯一!
n Travel time is the measure used most often. (有时候会考虑距离和固定费用: link distance + fixed costs )
n Crucial to traffic assignment
交通工程规划第七、八章
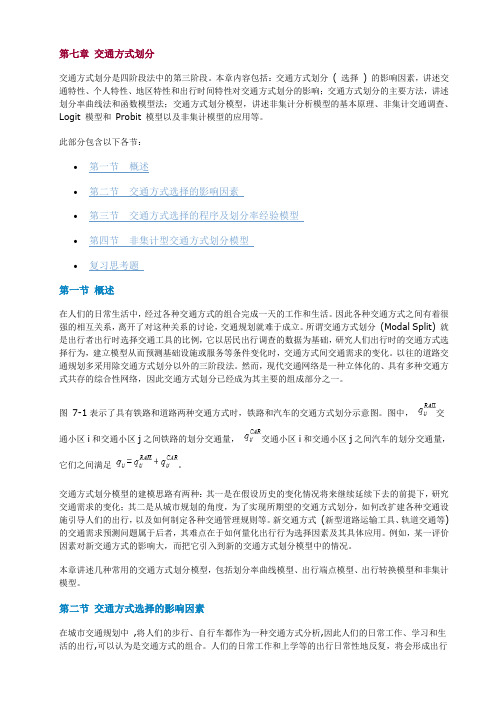
第七章交通方式划分交通方式划分是四阶段法中的第三阶段。
本章内容包括:交通方式划分( 选择) 的影响因素,讲述交通特性、个人特性、地区特性和出行时间特性对交通方式划分的影响;交通方式划分的主要方法,讲述划分率曲线法和函数模型法;交通方式划分模型,讲述非集计分析模型的基本原理、非集计交通调查、Logit 模型和Probit 模型以及非集计模型的应用等。
此部分包含以下各节:∙第一节概述∙第二节交通方式选择的影响因素∙第三节交通方式选择的程序及划分率经验模型∙第四节非集计型交通方式划分模型∙复习思考题第一节概述在人们的日常生活中,经过各种交通方式的组合完成一天的工作和生活。
因此各种交通方式之间有着很强的相互关系,离开了对这种关系的讨论,交通规划就难于成立。
所谓交通方式划分(Modal Split) 就是出行者出行时选择交通工具的比例,它以居民出行调查的数据为基础,研究人们出行时的交通方式选择行为,建立模型从而预测基础设施或服务等条件变化时,交通方式间交通需求的变化。
以往的道路交通规划多采用除交通方式划分以外的三阶段法。
然而,现代交通网络是一种立体化的、具有多种交通方式共存的综合性网络,因此交通方式划分已经成为其主要的组成部分之一。
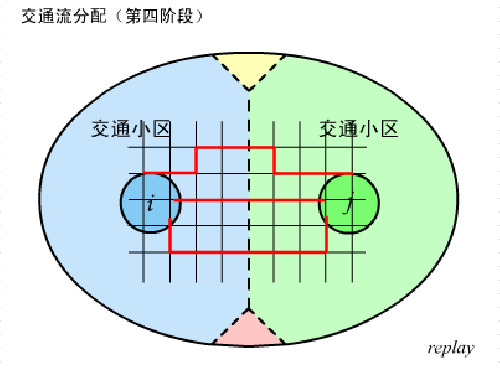
图7-1表示了具有铁路和道路两种交通方式时,铁路和汽车的交通方式划分示意图。
图中,交通小区i和交通小区j之间铁路的划分交通量,交通小区i和交通小区j之间汽车的划分交通量,它们之间满足。
交通方式划分模型的建模思路有两种:其一是在假设历史的变化情况将来继续延续下去的前提下,研究交通需求的变化;其二是从城市规划的角度,为了实现所期望的交通方式划分,如何改扩建各种交通设施引导人们的出行,以及如何制定各种交通管理规则等。
新交通方式(新型道路运输工具、轨道交通等)的交通需求预测问题属于后者,其难点在于如何量化出行行为选择因素及其具体应用。
例如,某一评价因素对新交通方式的影响大,而把它引入到新的交通方式划分模型中的情况。
交通工程学电子课件第8章交通流理论
移位的负指数分布 负指数分布拟合单车道交通流车头时距分布时,理论上会得到车头时距在0~1.0秒的概率较大,与实际情况不符。为了克服负指数分布的这种局限性,引入了移位的负指数分布,即假设最小车头时距不应小于一个给定的值 .
8.1 交通流的概率统计分布
M3分布
假设车辆处于两种行驶状态:一部分是车队状态行驶,另一部分车辆按自由流状态行驶。
常用递推公式 当交通量不大且没有交通信号干扰时,基本上可用泊松分布拟合观测数据;当交通拥挤时,车辆之间的干扰较大,则应考虑用其他分布。
二项分布
——二项分布参数,0<p<1,n为正整数。
01
02
8.1 交通流的概率统计分布
二项分布
01.
——二项分布参数,0<p<1,n为正整数。
02.
8.1 交通流的概率统计分布
8.4 流体力学模拟理论
车流连续性方程的建立
根据质量守恒定律: 流入量-流出量=数量变化
车流量随距离而降低时,车流密度则随时间而增大
01
车流波动理论
02
瓶颈处的车流波
03
紊流
8.4 流体力学模拟理论
时间t内横穿S分界线的车数N:
01
两种密度的车流运行状况
02
8.4 流体力学模拟理论
安全车头间距
02
假定两车停下来所需的加速度和距离都相等
车辆的速度
03
t+T时刻,后车加速度
车辆的加速度
8.2 跟驰理论
模型的稳定性
C ——表示车间距摆动特性的数值。该值越大表示车间距 的摆动越大; ——反应强度系数 ,其值大,表示反应强烈; T ——反应时间,s。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020/8/2
邓建华
1. Dijkstra法(标号法)
(2)算法步骤
Step2 设经过了K-1)步标号,节点i是刚得到P标号 的点,则对所有没有得到P标号的点进行下一步新的标 号(第K步);考虑所有与节点i相邻且没有标上P标号 的点{j},修改它们的T标号:
T kj m in [T j,P (i) d ij]
2020/8/2
邓建华
1. Dijkstra法(标号法)
(1) 算法思想 ①首先从起点O开始,给每个节点一个标号,分为T标号
和P标号两类; T是临时标号,表示从起点O到该点的最短路权上限; P标号是固定标号,表示从起点O到该点的最短路权。 ②标号过程中,T标号一直在改变,P标号不再改变,
凡是没有标上P标号的点,都标上T标号。 ③算法的每一步把某一点的T标号改变为P标号,直到
T 3 (3)=min[T(3),P(2)+d 23 ]=min[∞ ,2+2]=4
T 3 (5)=min[T(5),P(2)+d 25 ]=min[∞ ,2+2]=4
在所有 T标号(点3,4,5…9)中,节点4为最 小,给节点4标上P标号, 即P[4]= T 2 (4)=2。
所有节点均标上了 P标号,计算结束。得到节点1到 其他各节点的最短路权(P标号) 表 8.2-1 例题8-1计算结果
城市道路:可以计算分流向的、不分流的 交通流的延误,但是在实际操 作中比较困难,所以也可忽略 不计,或简单估计。
2020/8/2
邓建华
三、径路与最短径路
(一)径路与最短径路的定义
路段 网络上相邻两个节点之间的交通线路。
径路 网络上任意一OD点对之间,从发生点到吸引 点一串连通的路段的有序排列叫做这一OD点 对之间的径路。一OD点对之间可有多条径路。
式中 d ij— i到j的距离(路权); T(j ) —第K步标号前j点的T标号。
2020/8/2
邓建华
1. Dijkstra法(标号法)
(2)算法步骤 在所有的T标号(包括没有被修改的)中,比选出最小 的T标号T k(j 0 ):
T kj0m in [T kj,Tr]
式中 j 0 —最小T标号所对应的节点号;
T 1 (2)=… = T 1 (9)=∞ 。 步骤 2 节点1 刚得到P标号。节点2、4与1相邻,且均为T标号,修改这两点的T 标号:
T 2 (2)=min[T 1 (2),P(1)+d 12 ]=min[∞ ,0+2]==min[∞ ,0+2]=2 在所有(包括没修改的)T标号中,找出最小标号。2、4为最小,任选其一,如 节点2,即P[2]= T 2 (2)=2。 步骤 3 节点2 刚得到P标号。节点3、5与2相邻,且均为T标号,修改这两点的T 标号:
•实际中路阻是常量还是变量?
•路径选择的随机性表现在哪些方面,在交通分配时
将会有何思路解决。
2020/8/2
邓建华
第二节 交通流分配中的基本概念
一、 交通分配 交通流分配涉及到以下几个方面:
可将现状OD交通量分配到现状交通网络上,以分 析目前交通网络的运行状况。
也可以是将规划年OD交通量分布预测值分配到 现 状交通网络上,以得到规划年交通需求,为交通网 络的规划设计提供依据。
T(r ) —与i点不相邻点r的T标号。
给点 j 0 标上P标号:P(j 0 ) =T k (j 0 ),第K步标号
结束。
Step3 当所有节点中已经没有T标号,算法结束,得到
从起点1到其他各点的最短路权;否则返回Step2 。
2020/8/2
邓建华
【例8-1】 步骤 1 给定起点1 的P标号:P[1]=0,其他节点标上T标号:
所有的T标号都改变为P标号。即得到从始点O到其他 各点的最短路权,标号过程结束。
2020/8/2
邓建华
1. Dijkstra法(标号法)
(2)算法步骤
Step1 初始化:给起点1标上P标号P(1)=0,其余 各点均表标上T标号T1(j)=∞,j=2,3… , . n。即表 示从起点1到1的最短路权为0,到其他各点的最短路 权的上限临时定为∞。标号中括号内数字表示节点号, 下标表示第几步标号。经过第一步标号得到一个P标 号P(1)=0。
还可以将规划年OD交通量分布预测值分配到规划 交通网络上,以评价交通网络规划方案合理性。
2020/8/2
邓建华
二、交通阻抗
交通阻抗(或者称为路阻)在交通流分配中通过 路阻函数来描述,所谓路阻函数是指路段行驶时间与 路段交通负荷,交叉口延误与交叉口负荷之间的关系。 在具体分配过程中,由路段行驶时间及交叉口延误共 同组成出行交通阻抗。
最短径路 一对OD点之间的径路中总阻抗最小的径路叫 “最短径路”。
2020/8/2
邓建华
(二)最短径路算法
最短径路算法是交通流分配中最基本也最重要的算 法,几乎所有交通流分配方法都是以它作为一个基 本子过程反复调用。最短路算法问题包含两个子问 题:两点间最小阻抗的计算和两点间最小阻抗径路 的辨识。在各类文献中,有关交通流分配最短径路 的算法很多,如Dijkstra法、矩阵迭代法、FloydWarshall法等。
2020/8/2
邓建华
二、交通阻抗
交通阻抗由两部分组成:路段阻抗和节点阻抗。
1.路段阻抗
城市道路:Ca f({V})
公路: Ca f (Va)
BPR公路行驶时间函数:
2020/8/2
ta
t0[1
qa ca
]
邓建华
2.节点阻抗
公路:因为路段比较长,路段延误占绝大 多数,一般不计交叉口延误。
第八章 交通流分配
本章内容
▪ 第一节 ▪ 第二节 ▪ 第三节 ▪ 第四节 ▪ 第五节 ▪ 第六节
概述 交通流分配中的基本概念 非平衡分配方法 平衡分配方法 随机分配方法 动态交通流分配
2020/8/2
邓建华
第一节 概述
明确几个问题:
?
•城市交通网络上形成的交通流量分布是两种机制相
互作用直至平衡的结果。
节点 1
2
3
4
5
6
7
8
9
1
0
2
4
2
3
4
4
5
6
P标号 P(1) P(2) P(3) P(4) P(5) P(6) P(7) P(8) P(9)
交通规划实际中,需要求出路网中任意两个节点之间 的最短路权矩阵( n×n阶);尽管Dijkstra算法一次能 够算出从起点到其他各节点的最短路权,但仍不能满足要 求,用此方法求最短路权矩阵,需要反复运算n次,导致 计算效率不高,且速度较慢,所需存储空间较多,在大规 模交通规划中应用受到一定限制。