捣固车自动起拨道作业方法探讨
DCL-32连续性捣固车起拨道装置故障分析
DCL-32连续性捣固车起拨道装置故障分析发布时间:2021-07-28T10:40:19.080Z 来源:《基层建设》2021年第13期作者:刘泽[导读] 摘要:大型养路机械设备通过汇集机电液并控制于一体实现人工自动化,极大的提高了既有铁路设施的维护效率但施工中故障发生率较高。
中国铁路武汉局集团有限公司武汉大型养路机械运用检修段湖北武汉 430012摘要:大型养路机械设备通过汇集机电液并控制于一体实现人工自动化,极大的提高了既有铁路设施的维护效率但施工中故障发生率较高。
本文在结合DCL-32连续性捣固车起拨道装置机构原理分析的基础上,总结了DCL-32连续性捣固车起拨道装置故障处理与维护相关经验,对大型养路机械故障排除和设备维护工作提供借鉴。
关键词:捣固车;起拨道;原理;故障;维护 1 引言近年来,随着铁路总公司对设备运用、管理、维护要求的不断提高,线路设备单位就如何提高线路设备稳定性,减少在机车车辆横向、纵向以及垂直综合动力作用下,以及在风、雨和温度变化等不良自然条件影响下线路产生的高低、水平、三角坑等病害给列车高速运营带来的安全隐患,不断的进行研究探索。
为进一步提高施工质量、实现线路安全运营,机械化养路是一种必然趋势。
DCL-32连续性捣固车作为铁路部门用于维护铁路线路状态的一种集机电液和控制于一体的设备,普遍应用于铁路设施各站段。
随着铁路维修体制工作的不断推进、线路修理周期的缩短,线路运输和线路修理之间的矛盾越来越突出,这就要求尽可能提高线路维修占用的时间来减少对铁路运营的干扰。
提高线路维护中养路机械的工作效率和精度已是必然。
目前大型养路机械在线路维修施工中扮演着不可或缺的角色,是维护铁路客货运安全运输的重要保障。
针对庞大的车辆系统如何实现设备操作的可靠性,本文围绕车辆核心起拨道装置进行探讨,分析和梳理日常维护项点和典型故障处理方案。
2 起拨道装置的作用 DCL-32连续性捣固车作业功能主要由起拨道系统、捣固装置两个核心体系组成,其中起拨道系统的可靠性是线路平顺度最直接的影响因素。
D08—32捣固车捣固装置控制系统调试探讨与典型故障分析

D08—32捣固车捣固装置控制系统调试探讨与典型故障分析眼下社会经济发展迅速,铁路事业也随之得到了不断的进步,现先后投入了更多的代化设备,自动化、机械化发展已经成为了自然趋势。
在铁路工务施工中D08-32型捣固车是一种重要机械设备,为铁路线路的维修提供了有力的技术保障,发挥着重要作用。
D08-32捣固车属于一种大型机械,自动化程度较高,内部液压系统十分复杂,导致在工作过程中时常出现故障问题,为了更好的保证其使用效果,提高工作效率,必须要进行有效处理,做好故障解除措施。
文章对此做了深入研究。
标签:D08-32捣固车;铁路施工;装置系统;故障;措施1 D08-32型自动整平捣固车的结构组成D08-32型捣固车的结构组成较为复杂,主要由转向架、车钩缓冲装置、前司机室、后司机室、主车架、材料车、捣固装置、起拨道装置、枕端夯实装置、检测系统、液压系统、电气系统、气动系统、动力传动系统、制动系统及激光准直设备等部分组成。
2 对D08-32捣固车捣固装置控制系统的调试捣固车在长时间的运行之后难免会出现各种问题,例如上升下降不一致或者运行时候有沖力等等,这种情况下,就必须要对捣固车的控制系统进行调试,保证其始终处于正常的运行状态。
在整个调试的过程中必须要保证安全,每一个动作操作前必须按电笛示警,同时做好调试前的准备工作。
工作人员必须要按照规定顺序进行操作,整个过程中捣固装置都要处于作业状态,控制好发动机的开关。
具体要根据捣固车的实际情况进行,在保证四个深度传感器在捣固装置提升锁定位时的输出值相同的情况下也要注意到线路的状况、四片捣固头的协调程度以及上中下位信号的产生进行合理的调试,否则即使是调试完毕也会受到传感器的不良影响。
3 D08-32型捣固车捣固装置系统典型故障分析3.1 系统漏油故障漏油这种现象在捣固装置中十分常见,通常情况下,捣固装置漏油主要发生在主轴箱、镐臂和油缸等位置。
具体如下:(1)主轴箱漏油。
浅析CDC-16型道岔捣固车拨道随动系统原理
浅析CDC-16型道岔捣固车拨道随动系统原理CDC-16型道岔捣固车是我国为适应铁路大提速,我国昆明厂制造,用来维护铁路道岔的专用大型养护设备。
该设备除了具有正线捣固设备的功能外,还具备适应道岔作业的一系列特有功能,其拨道系统前后端的随动补偿系统就是CDC-16为防止道岔区域作业时捣固装置捣断拨道系统测量钢弦而专门设计的一套随动系统。
这套系统的加入,为了不影响随动时拨道系统准确的测量线路的方向误差,对拨道系统的几何及电路模型上做了特殊的设计,本文将对其几何及电路实现原理进行说明,以达到对新车型、新技术进行深入的了解。
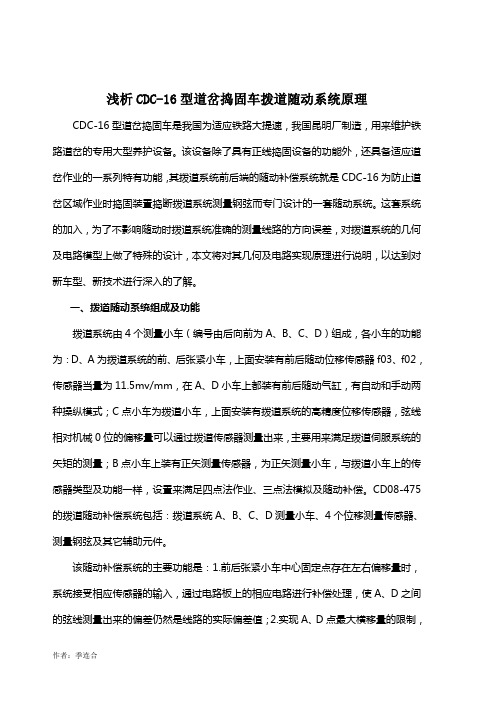
一、拨道随动系统组成及功能拨道系统由4个测量小车(编号由后向前为A、B、C、D)组成,各小车的功能为:D、A为拨道系统的前、后张紧小车,上面安装有前后随动位移传感器f03、f02,传感器当量为11.5mv/mm,在A、D小车上都装有前后随动气缸,有自动和手动两种操纵模式;C点小车为拨道小车,上面安装有拨道系统的高精度位移传感器,弦线相对机械0位的偏移量可以通过拨道传感器测量出来,主要用来满足拨道伺服系统的矢矩的测量;B点小车上装有正矢测量传感器,为正矢测量小车,与拨道小车上的传感器类型及功能一样,设置来满足四点法作业、三点法模拟及随动补偿。
CD08-475的拨道随动补偿系统包括:拨道系统A、B、C、D测量小车、4个位移测量传感器、测量钢弦及其它辅助元件。
该随动补偿系统的主要功能是:1.前后张紧小车中心固定点存在左右偏移量时,系统接受相应传感器的输入,通过电路板上的相应电路进行补偿处理,使A、D之间的弦线测量出来的偏差仍然是线路的实际偏差值;2.实现A、D点最大横移量的限制,以保护A、D小车中心叉及整个方向测量系统;3.实现自动对中功能。
二、随动的几何模型前后随动系统功能的实现,是通过严格的几何原理推导而通过电路来实现的,随动的可能情况有以下几种:1、A点固定,D点左右移动;2、D点固定,A点左右移动;3、A、D点同时向一个方向移动;4、A、D点交叉向相反方向移动。
起拨道器的工作原理及操作规程

起拨道器的工作原理及操作规程铁道线路道床在通过列车荷载的不断冲击碾压下会发生不断变形。
若变形值超过规定标准,就会影响列车运行的平稳度,增加运行阻力,影响运行速度,甚至威胁列车运行安全。
所以必须经常对线路的横、纵断面进行校正,对线路纵断面位置误差进行起道校正,对线路横断面位置误差进行拨道校正。
因此在铁道线路维修保养的起、拨道作业中常采用便捷、省力的液压起拨道机具。
在线路日常保养起、拨道量小的精确调整中一般采用液压起拨道器,在线路维修起、拨道量较大的调整中一般采用液压起拨道机。
接下来中运智能机械集团的小编为大家介绍一下起拨道器的工作原理及操作规程吧zy12 !起拨道器的工作原理是:顺时针拧紧回油阀,通过手摇柄的外力作用推压柱塞泵的油液介质产生压力,等压传递到介质内部的所有各点,油液介质推动油缸外伸,拨道时拨道杆置于钢轨底板侧面,油缸推动拨道杆顶住钢轨完成线路拨道作业。
起道时起道轮置于钢轨底部,油缸外伸与拨道杆一起支撑起道轮将钢轨抬起而实现线路起道作业。
作业完毕后,逆时针旋松回油阀,在钢轨重力作用下,起道轮和拨道杆复位。
该机器最大特点是一机两用、起拨分开、具有增力功能,既能满足线路起道作业的需要,又能符合拨道作业的要求。
并且具有双功能,空载时起道轮能快速接近钢轨,减少空程损失,提高起、拨道作业的效率。
起拨道器操作规程如下:1、操作人员经段培训考试合格熟悉本机性能后,方能操作液压起拨道器上道作业。
2、作业前要检查起拨道器油箱内是否有足够油量(以活塞的最大行程为准),检查有无泄漏现象,然后空载运行几次,检查油缸内是否混有空气,如有空气要进行排气,然后将油缸降至最低位置,检查各止回阀是否有泄漏现象,检查各紧固件是否有松动,拧紧回油阀,关闭回油通道。
3、作业时可在道床上选好方位,一手提起机具,一手拿着已插入助力孔中的加力手柄,顺势将起拨道器送入轨底,紧靠限位块,摆正其安装位置然后放下提把,把手柄插入摇把孔中,摇动手柄升起起道轮及顶臂进行作业。
铁路大型捣固机车作业方法及技术参数分析

4.5堵管处理工程经验表明,喷射施工中很少出现堵管现象,一旦出现此情况时则需要确保机械手以及计量泵处于关闭的状态,在此基础上再切断输送风,安排人员拍打软管,并将残留在其中的混凝土清理干净,当做好堵物处理工作后应当注入水进行洗管。
4.6混凝土坍落度要求严格控制好骨料粒径,其必须介于16mm范围内,一旦超出该标准后则会引发阻力过大问题,并进一步使得骨料无法顺利喷出,所以会对功效造成直接影响。
关于混凝土的坍落度,其需要控制在160~180mm范围内,且伴随着集料类型的不同,对应的砂率也存在差异,通常情况下需要介于50%~ 60%之区间内。
4.7工作风压、风量关于工作风压力,其需要控制在0.2~0.4MPa区间内,这与混凝土的和易性有着密切的关联,如果和易性较为优良,此时所需的工作风压偏小。
风压的具体值需要参考工作面距离而确定,同时需要确保机械受输送管径的合理性,所得到混凝土出口速度应足够合理,在实际施工过程中应当对混凝土和易性以及风压值做以分析,在此基础上进行合适地调整,确保混凝土在喷射口区域的质量。
如果岩面较脏,则需要使用高压风进行处理,由此增强混泥土与岩面的粘结力。
当出现超欠挖现象后,需要对该部分区域进行处理。
如果喷射层厚度偏大,此时在自重的影响下将会引发喷层坍落现象;反之,如果厚度偏小,则会致使部分粗集料发生回弹现象。
5结束语综上所述,湿喷机械手施工技术尤为关键,它已经在铁路隧道工程中取得了广泛的应用,带来的回弹率更低,具有良好的可操作性,可以显著提升铁路隧道工程质量,具有高度的推广价值。
参考文献[1]王华春.大型喷射混凝土机械手湿喷工艺施工工法[J].建筑安全, 2018,33(04):67-69.[2]丁国新.大型喷射混凝土机械手湿喷工艺施工工法[J].科技创新导报,2017,14(07):53-54.[3]王智峰.长大隧道湿喷机械手初支施工技术[J].山西建筑,2018,44 (10):166-167.收稿日期:2019-5-18作者简介:刘永福(1991-),男,湖南韶山人,工程师,本科,从事铁路施工工作。
韩志青、唐定全版《抄平起拨道捣固车》第十一章 操纵

第十一章操纵第一节运行前的检查准备一、运行前的常规检查准备1.按照捣固车保养制度或手册的要求对捣固车各部进行润滑保养,保证捣固车处于良好的润滑状态。
2.捣固车出现的故障要及时排除,严格杜绝带故障运行和作业。
3.对捣固车进行必要的擦拭,清除各部位的油污,以保持良好的清洁。
擦洗捣固车时应避免随意使用带有腐蚀性的化学清洗剂。
4.对捣固车的外露且容易松动脱落的螺钉、螺栓、螺母、销等紧固件进行定期检查,以保证机械各部件保持良好的紧固状态,利于安全行车和作业。
5.定期检查控制制动系统、手制动系统、液压制动系统各部件的状态及性能,不符合规定的要及时调整。
6.检查所有工作机构、检测装置的安全锁定机构,保证锁定机构处于可靠状态。
7.检查各油箱或油池的油位及其它液面高度,做到及时补充或更换。
检查项目包括:(1)发动机机油油位(2)动力换挡变速箱油位(3)分动齿轮箱油位(4)车轴齿轮箱油位(5)作业液压走行驱动减速箱油位(6)液压油箱油位(7)柴油箱油位(8)空气回路注油器油位(9)捣固装置润滑油箱及导向柱润滑油杯油位(10)蓄电池电解液液面(除去硅胶等电介质为固体的蓄电池)(11)空气回路防冻装置液面(12)空调器氟利昂液面8.检查必备的随机工具,随机关键备件。
要求齐全,状态或功能良好。
9.检查捣固车随机配备的安全备品和装置。
要求时刻处于良好状态。
如:信号旗、火炬、响墩、信号灯、复轨器、灭火器等,严格按照铁路有关安全行车规章办理。
10.对于闲置已久或新启用、经过大修的捣固车,严格按照铁路有关设备管理规章,进行功能、状态检查或试验。
二、运行前的机械准备1.检查各控制开关机手柄等(1)空气制动系统处于规定的工作模式。
(2)动力换挡变速箱末级离合器手柄转至垂直ON位,并锁定。
(3)作业液压泵驱动离合器处于拉出位置。
(4)手制动装置处于制动位置。
(5)作业气动塞门处于断开位,塞门手柄在下位。
(6)所有液压作业系统均处于泄压位。
道岔捣固车数字化捣固作业程序及注意事项

道岔捣固车数字化捣固程序作业 1.1在班组点前交班会上,施工负责人将ver数据(修改后数据及原始数据)拷贝到各车组专用U盘。
1.2上车待TGCS启动后,各机械车二号位使用专用U盘将数据导入使用TGCS软件时,将数据导入“前端修正数据”文件夹中并模拟作业检查确认无误后向司机长汇报,如下图所示。
1.3 根据施工需要及相关规定,对起拨道量极限值进行设定,如下图所示。
1.4输入线路几何参数:二号位打开TGCS软件,在“新建线路数据文件”中,按照实际作业里程及VER数据的里程方向,输入线路几何参数,司机长审核确认。
1.5二号位点击“启动工作模式”,打开“准备作业”对话框,调入作业地段的线路几何参数文件和前端修正数据文件(ver数据),并依次确认作业实际起、终点(数据里程方向与机械车作业方向相反时,选择“反向作业”模式),如下图所示。
1.TGCS的几何参数文件要与设备单位提供的前端修正数据文件、枕木上标记的里程方向、拨道方向一致。
2.供的前端修正数据要与曲线资料按照统一的里程提供。
3.业起点应选择线路质量较好的地段,应避开撤板地段、变坡点、线路薄弱地段等地段。
4.中直接从读取作业1.6二号位将TGCS上显示的各项参数核对无误后通知司机长进行对点。
1.7司机长与工务配合人员确认作业起点后,通知一号位移动机械车,将D点测量轮对准作业起点,如下图所示。
1.8起拨道零点:二号位拨动“手动起、拨道电位计”,观察数字显示器及起拨道表针,确认起拨道零点。
准备完毕后通知司机长。
1.9得到司机长对准作业起点的命令后,二号位在“准备作业”对话框中点击“确定”,进入作业模式。
1.10因线路原因,左右抄平表显示有起道量时,二号位通知一号位向前移动机械车,在左右抄平表指针回红区后再开始作业。
此时,二号位与司机长必须严格确认起点里程与TGCS上的数据相同,确保TGCS上的起拨数据与现场一致(也可以找到作业起点后倒车在数据的顺坡距离内寻找抄平零点)。
提高型捣固车作业技术质量方法

提高型捣固车作业技术质量方法作者:杨耀勋来源:《城市建设理论研究》2013年第10期摘要:本文主要论述了维修线路状况对自动超平捣固车作业的影响因素,同时对捣固车作业性能进行深入的研究,制定捣固车的作业模式,提高作业效率。
关键词:起道拨到线路状况横向水平中图分类号: TN913.1 文献标识码: A 文章编号:一、概述:捣固车,是引进奥地利Plasser&Theurer技术生产的大型铁路线路养路机械。
是集机械、电气、液压一体的自动化铁路线路养护设备,能自动拨道、超平线路,并对线路进行夯实和捣固作业。
二、现状分析随着我国铁路线路的延伸,高速线、普通线、货运线、地方线、专用线以及工程线,铁路线路的如此多样性通,怎样才能提高捣固车的作业效率最高。
通过长期跟踪作业, 分析其因素并探索出一套提高作业技术质量的方法。
因此,本项目针对此要求对影响捣固车作业及数量的因素和对策进行深入的探讨和研究,以期获得良好的实际作业效果。
三、研究内容及关键技术1. 查找影响捣固车作业质量的因素捣固车作业前对线路的状况进行系统分析,找出影响线路施工质量的客观因素。
以下就列举一些线路状况不达标的情况:1.1道床缺碴1.2线路设施未拆除1.3曲线资料不准确1.4线路设备缺陷①道床板结②基床松软、翻浆冒泥③扣件松动④轨距误差⑤接头病害⑥钢轨缺陷2. .利用捣固车更好地提高作业线路技术质量的方法2.1确定适当的基本起道量捣固车的作业方式是全起全捣, 必须要有一定的起道量从而消除轨道横向和纵向的误差( 捣固车不能落道) , 但是过大的起道量对道床扰动较大, 作业后的沉降较大, 均匀性较差。
在维修作业中对线路过大的扰动百害而无一益。
根据捣固车作业后轨面下沉规律研究表明, 当基本起道量为 25~ 40 mm 时, 作业后轨面下沉比较小且均匀; 而基本起道量< 25 mm 或> 40 mm时, 下沉比较大。
为此, 应本着从实际出发的原则, 结合道床道碴多少和密实程度确定适当的起道量, 这样既能最大限度地消除横向和纵向误差, 又要控制起道量值, 否则过大的起道量不仅难以保持, 而且造成线路状态失稳, 危及行车安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
捣固车是我国有砟线路大修、维修作业中的必备 大型养路机械之一。但由于其本身测量弦长度较短, 不能很好的消除线路长波不平顺。为了消除长波不平 顺, 提高捣固车作业精度, 使用激光准直系统作业能较 好的解决这一问题。
1) 响应速度快 采用当前配置和性能较好的工控 计算机系统作为数据处理器件, 具有更高的数据计算 能力。本系统输出速度可以达到 25 次Ps, 即每秒数据 更新 25 次。
2) 测量精度高 系统中采用大量数据处理方法, 让输出数据平滑, 以减少偶然干扰和随机误差。
3) 测量距离长 该系统推荐使用距离为 300 m 左 右; 600 m 时接收系统能正常工作, 但由于光束波动较 大, 图像取样精度受到影响, 测量精度有所降低, 不推 荐使用。
目前我国铁路大型捣固车只 有 082475 重型道岔 捣固车和 0923X 捣稳一体车 装备了 PLASSER 公司提 供的二维激光准直系统。而 082475 捣固车的二维激 光准直系统由于控制系统未配齐, 尚不能作为二维激 光使用。随着铁路第六次大面积提速和新建客运专线 和高速铁路的出现, 需要更多的捣固车具备/ 自动起拨 道作业0的功能。根据铁道部科研项目计划, 铁科院养 路机械事业部在昆明中铁和株洲时代电子集团的协助 和配合下, 经过几年的艰苦钻研, 研发了具有自主知识 产权的 JZT2C 型两维激光准直系统, 其功能和性能超 过了进口同类产品。2008 年 6 月在 082475 道岔捣固 车上安装了国产的两维激光系统, 在现场进行了自动 起拨道作业的使用方法的摸索。由于这是国内首次使 用自动起拨道作业, 本文介绍了国产 JZT2C 型两维激 光准直系统, 并根据现场实践重点探讨了捣固车自动
3 结语
按上述方法进行自动起拨道作业后, 根据工务部 门的检测表明, 线路作业后效果较好, 有效的减少了线 路的长波不平顺性。同时通过两维激光的自动起拨道 系统的使用, 比采用精确作业法和近似法作业, 提高了 作业效率, 减轻了司机的劳动强度, 提高了作业精度, 很受现场用户的欢迎。
捣固两维激光准直系统的现场使用表明, 通过对 该系统性能的正确掌握, 合理的使用, 可以提高捣固车 的作业效率, 提高捣固车作业精度, 特别是消除长波不 平顺, 从而满足线路高平顺性的要求。
铁 道建筑
96
Railway Engineering
January, 2009
文章编号: 100321995( 2009) 0120096202
捣固车自动起拨道作业方法探讨
刘铁军
( 广铁集团 广铁工务机械段, 广州 516660)
摘要: 重点介绍了国内首次使用的 JZT2C 两维激光准直系统, 并根据两维激光准直系统在 082475 捣固车 上的安装和现场使用实践, 探讨了该系统在捣固作业时的正确使用方法。现场使用表明, 正确使用该系 统, 可以提高捣固车作业精度, 特别是对消除长波不平顺, 提高作业效率, 达到提速线路高平顺性的要 求, 是一种非常有效的作业方法。 关键词: 捣固车 自动起拨道 作业方法 中图分类号: U216161 文献标识码: B
收稿日期: 2008209208; 修回日期: 2008210208 作者简介: 刘铁军( 1975 ) ) , 男, 湖南耒阳人, 工程师。
起拨道作业的使用方法。
1 J ZT2C 型两维激光准直系统
111 工作原理 JZT2C 型激光 系统是两维激 光准直系统, 其工作
原理的主要特征是/ 两维 CCD 图像接收0。 发射器射出的点状激光光束作为准直/ 基准线0。
5) 接收器用毕不必拆卸 该激光接收器的安装位 置和外形尺寸, 充分考虑到各型捣固车的下部空间, 能 够满足激光接收小车收起时, 接收器不会与其他构件 相冲突, 因此激光作业结 束后不必拆卸接收器( 见图 1) 。但长途转运时为安全起见, 最好将接收器拆下放 到司机室内。 113 系统改造与安装
2008 年 6 月在广铁集团工务机械化段的 DG63 号 082475 道岔捣固车上安装了 JZT2C 型两维激光系统, 并对电气系统进行了改进, 使得两维激光系统可以正 常使用。
参 考文 献
[1]王午 生. 铁 道 线路 工 程 [M]. 上 海: 上海 科 学技 术 出版 社, 199 9. [ 2] 韩志青, 唐定全. 抄平 起拨道 捣固车[ M] . 北京: 中 国铁道 出 版社, 1997.
( 责任审编 赵其文)
3) 确定激光使用基准点 根据线路实际状况, 选 择合理的激光发射点和作业的距离。 212 作业方法
1) 在确定位置处放下激光小车, 并选择合适的加 载方式定位。
2) 在作业起始区域找到拨道零点。 3) 打开激光系统, 将人工输入值均置零, 利用自 动对光系统对零点。 4) 对好激光后, 作业选择开关选/ 只拨道0, 开始 作业, 同时竖直方向利用人工输入进行顺坡。 5) 高度方向顺坡到基本起道量后停车, 将当前水 平激光测量值人工输入, 按自动对光。 6) 对光到指定位置后, 将作业选择开关选/ 既起 道又拨道0, 开始作业。 7) 出当前组道岔区域后停车, 将激光测量值人工 输入, 更换加载方式, 自动对光到指定位置后, 继续下 一组道岔区域作业。 8) 作业到激光发射器位置, 停止作业, 记录当前 激光两个方向的测量值, 关闭激光系统。 9) 根据当前测量值开始水平和竖直方向的顺坡, 找到起道、拨道零点则作业结束。
< 25 mm 或> 40 mm 时, 下沉比较大。为此, 应本着 从实际出发的原则, 结合道床道砟多少和密实程度确 定适当的起道量, 最大限 度地消除横向和纵 向误差。 要控制起道量值, 否则过大的起道量不仅难以保持, 而 且造成线路状态失稳, 危及行车安全。一般对于线路 维修作业, 基本起道量定为 25~ 40 mm 较适宜。
图 1 两维激光接收器
2 捣固车自动起拨道作业方法
为了达到最佳作业效果, 必须采用合理的作业方 法。结合现场使用方法经过多方面的摸索, 对两维激 光系统在道岔区作业, 提出一套完整的使用方法。道 岔区域为两组道岔一次作业完成, 作业时以直基本轨 为加载轨道。 211 作业准备
在使用该系统前, 须做好如下的准备工作: 1) 激光系统零点标定 在标准的平直线路上进行 标定, 水平标定分左加载和右加载两种方式。标定后 调整标尺的位置, 使发射小车和接收小车的实际中心 线重合。 2) 确定基本起道量 捣固车的作业方式是全起全 捣, 必须要有一定的起道量以消除轨道横向和纵向的 误差( 捣固车不能落道) 。但是过大的起道量对道床扰 动较大, 作业后的沉降较大, 均匀性较差。在维修作业 中对线路过大的扰动有百害而无一益。根据捣固车作 业后轨面下沉规律研究表明, 当基本起道量为 25~ 40 mm 时, 作业后轨面下沉比较小且均匀; 而基本起道量
4) 具有自动对光功能 为解决现场使用中两维系 统对光较难的问题, 研制了自动对光系统。当光束扫 到接收屏上时, 只需按下 司机室中主机上的/ 自动对
2009 年第 1 期
捣固车自动起拨道作业方法探讨
97
光0按钮, 对光指令通过无线传输模块实现遥控, 发射 端就能将激光束自动调到接收屏中心。也可以对光到 指定位置, 对光的指定位置可由司机室码盘输入的模 拟量确定。对光精度不大于 ? 1 mm。