现代控制理论第一章答案
现代控制理论第版课后习题答案
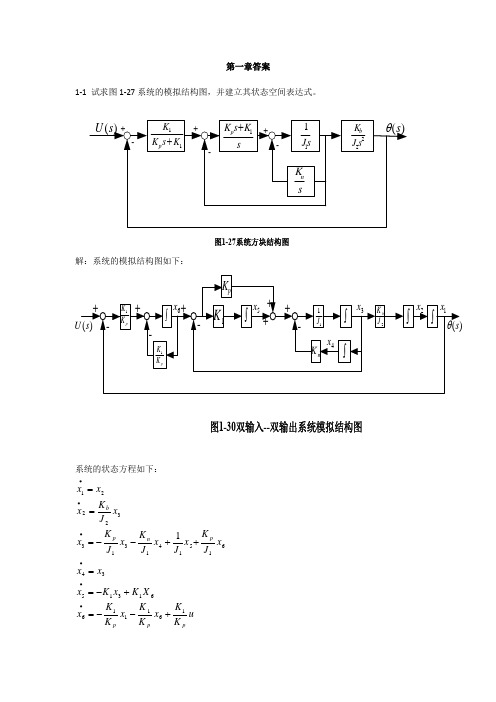
习题答案Document number : WTWYT-WYWY-BTGTT-YTTYU-2018GT《现代控制理论参考答案》第一章答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:令0(s) = y,则,=册所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压"⑴为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻R?上的电压作为输出量的输出方程。
解:由图,令ii =x}J2 =x2,u c =x3l输出量y = R2X2• & 1 1Rg + L, Xj + x y = u有电路原理可知:L2XI+R2X2=X3= x2 +C x3写成矢量矩阵形式为:14两输入也,两输出比,比的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令x, = y,吃=,,兀3 =,,则有相应的模拟结构图如下:并画岀相应的模拟结构图10 £初・ 117/ \ 6(5 + 1) -4 V 3 a解:VV (5)= ------ ---------- = --------- +— + ------------+ 丄s(s + 2)(s + 3y (s + 3y 5 + 3 s + 2 s1- 7给定下列状态空间表达式y = [0 0 1 x 2_V 3_(1) 画出其模拟结构图 (2) 求系统的传递函数解:-1 0(2) W(s) = (s/ — A)= 25 + 31 — 1 5 + 31-8求下列矩阵的特征矢量_0 1 0 _ (3)32-12 -7 -6-1 0解:A 的特征方程 |刀—A|= —3 2-2 =23+6/l 2 + lU + 6 = 0 1272 + 6解之得:入=—1,/?2 = —2,/?3 = —31-6 (2)已知系统传递函数W(s)=6(5 + 1)5(5 +2)(5+ 3)2,试求岀系统的约旦标准型的实现,■ 010 '/AiP113 0 2 P11 =— P21 -12 -7 -6_ ■皿■叽当人=一1时,令內=1Ai-1 (或令Pll =一1,得片=P21 =1 )1■ 0 1 0 ■P\2Pn 3 02 Pll =-2 P22-12 -7 _6. L/^2.解得:”22=一2卩2丿32 =>12'P22 =P\2(或令从2 T,得4 = "22“320 1当人=一3时, 3 0 -12 -71 -2£ 2解得:〃23=-3/心〃33=3门3令戸3 = 1得1・9将下列状态空间表达式化成约旦标准型(并联分解)~4 1 -2■3 fX 2 = 1 0 2X 2 + 2 7⑵-.1-1 d_5 3_得解得:P 2] =^31 =-P\\当人=一2时,令门2 = 2 得P 2 = 2 -41'4 1 -2'当人=3时, 1 02=3 "211 -13 .解之得 Pl2 = P12 + 1,P22 = “32 令 Pl2 =1并联联结(第3版教材)已知如图1・22所示的系统,其中子系统1、2的传递函数阵分别求系统的闭环传递函数_4 1 -2 P11PwT 1 0 2 "21 =3 P21 + 11 -1 3 -■叽丄 当An =3时,解:A 的特征方程2-4 -1 |27 - A| = -12 -1 1 2-2 =(2-1)(2-3)2 =02- 3解之得 P2! =Pj] =P11令/“iPw■fP21 = 1■叽丄当人=1时, 解之得 P13 = °,“23 = 2^33 令 “33 = 1约旦标准型1- 10已知两系统的传递函数分别为W|(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解: (D 串联联结MlR = 得10 -1得1-H (第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:M2已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数I】的系数b(即控制列阵)为⑴b=;解法1 :解法2 :求T,使得厂,;得宀鳥所以T=所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数屛‘。
现代控制理论第版课后习题答案
现代控制理论第版课后习题答案Prepared on 22 November 2020《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有相应的模拟结构图如下: 1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++= 1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图 (2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P(或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P )当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
现代控制理论课后习题答案

现代控制理论课后习题答案第⼀章习题1.2求下列多项式矩阵()s D 和()s N 的两个不同的gcrd:()2223(),()1232s s s s s s s s s ??++== ? ?+-??D N 解:()()22232321s s s s s s s++ =++ ? ?D S N S ; ()3r 2,1,2E -:223381s s s s s s ??++ ?-- ? ???;()3r 2,3,3E :223051s s s s s ??++ ?- ? ???;()3r 1,3,2E s --:01051s s ?? ?- ? ;()3r 2,1,5E s -:01001s ?? ?;()3r 3,1,1E -:01000s ?? ? ? ???;()1r 2,3E :01000s ?? ? ? ???;()1r 1,2E :00100s ?? ?;所以⼀个gcrd 为001s ??;取任⼀单模矩阵预制相乘即可得另⼀个gcrd 。
1.9 求转移矩阵t A e (1)已知1141??=A ,根据拉⽒反变换求解转移矩阵tA e 。
(2) 已知412102113-?? ?= ? ?-??A ,根据C-H 有限项展开法求解转移矩阵t A e 。
解:(1)11()41s s s --??-= ?--??I A1110.50.50.250.2511(3)(1)(3)(1)13131()4141110.50.5(3)(1)(3)(1)(3)(1)3131s s s s s s s s s s s s s s s s s s s s s s s --+---+-+??-+-+ ? ?-=== ? ?---+ ?-+ ? ?-+-+-+-+?I A 3311330.5e 0.5e 0.25e 0.25e e ()e e 0.5e 0.5e t t t t t t tt t s ------??+-??=-= ??? ?-+?A L I A (2)由2412()12(1)(3)0113λλλλλλ--?? ?=--=--= ? ?--??A I -,得1,233,1λλ== 对1,23λ=,可以计算1,2()2rank λ=A I -,所以该特征值的⼏何重数为1。
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
《现代控制理论》第3版课后习题答案

《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
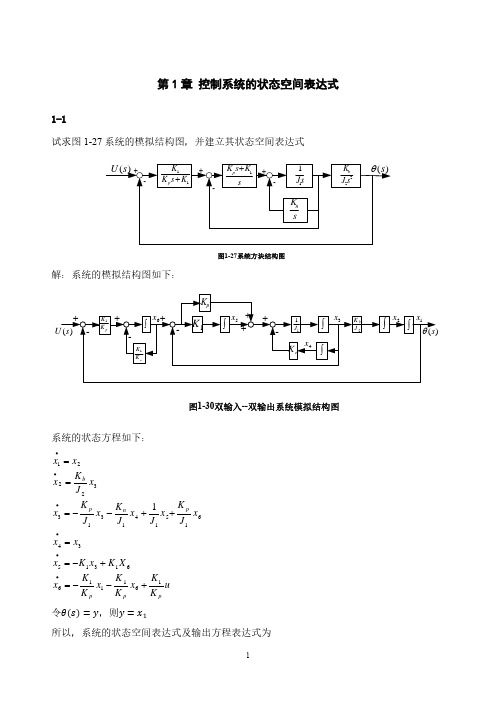
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K x K x K x X K x K x x x x J K x J x J K x J K x x J K x x x p n pb1611166131534615141313322211+--=+-==++--===••••••——所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡••••••654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:——[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》第三版第一章.习题答案
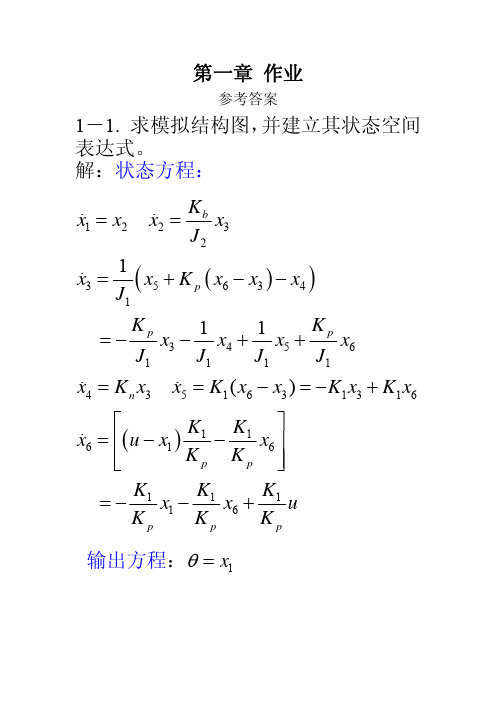
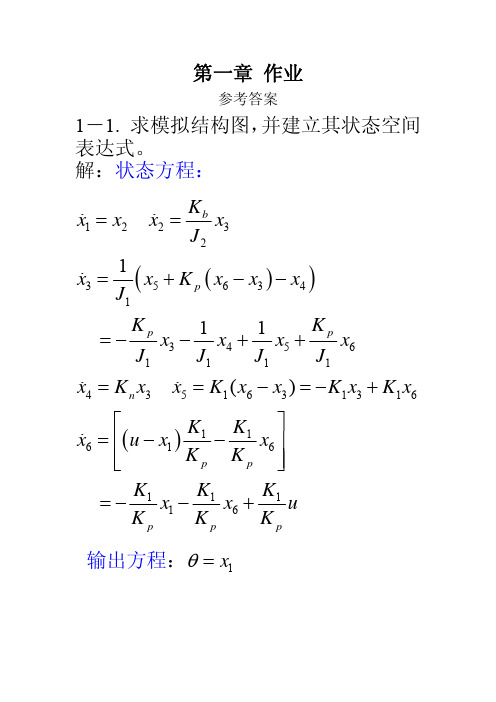
第一章 作业参考答案1-1. 求模拟结构图,并建立其状态空间表达式。
解:状态方程:()()()1223235634134561111435163131161611116111()bp pp n p p p p p K xx x x J xx K x x x J K K x x x x J J J J 16xK x xK x x K x K x K K x u x x K K K K K x x u K K K ===+--=--++==-=-+⎡⎤=--⎢⎥⎢⎥⎣⎦=--+输出方程:1x θ=矩阵形式: =xAx +B u y =Cx 其中:211111110100000000011000000000000000b 1p p n p p K J K K J J J J K K K K K K K ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥--⎢⎥⎣⎦A = 100000Tp K B K ⎡⎤=⎢⎥⎢⎥⎣⎦[]100000C =;1-3. 图1-29机械系统。
1M 2M 受外力作用1f 2f 作用,求1M 2M 运动速度输出的状态空间表达式。
解:微分方程111112112()()M yf K c c B y y =---- 22222221121()12()M yf K c B y K c c B =--+-+ y y - 设状态变量[]1212Tc c y y x =[]12Ty y y =,[]12Tf f =u令11x c =,22x c =,31x y =,42x y = 13xx = 24xx = 1111312341111111K K B B x x x x x M M M M M =-+-++ f1121214124322221K K K B B B x x x x x M M M M M ++=--++22f所以 =xAx +B u y =Cx 其中:11111111112112220100001K K B B M M M M K K K B B B M M M M ⎡⎤⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥++⎢⎥--⎢⎥⎣⎦A =22 1200001010B M M ⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦C 00100001⎡⎤=⎢⎥⎦ ⎣1-5. 根据微分方程,写状态方程,画模拟结构图。
现代控制理论试题与答案

现代控制理论试题与答案《现代控制理论参考答案》第一章答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:令,则所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式‘画出其模拟结构图求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A 的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数。
现代控制理论第版课后习题答案
现代控制理论第版课后习题答案Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有相应的模拟结构图如下: 1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++= 1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图 (2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P(或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P )当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
现代控制理论基础第一章习题答案
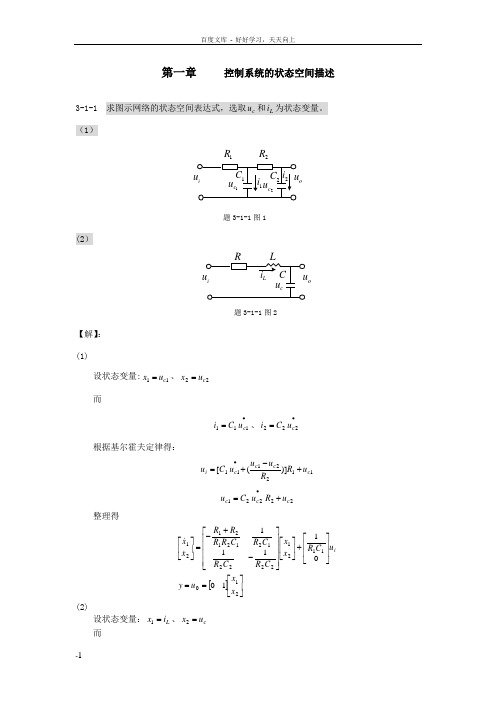
第一章 控制系统的状态空间描述3-1-1 求图示网络的状态空间表达式,选取c u 和L i 为状态变量。
(1)1R 2Ro题3-1-1图1(2)o题3-1-1图2【解】: (1)设状态变量:11c u x =、22c u x = 而•=111c u C i 、•=222c u C i根据基尔霍夫定律得:1122111)]([c c c c i u R R u u u C u +-+=•22221c c c u R u C u +=•整理得[]⎥⎦⎤⎢⎣⎡==⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-+-=⎥⎦⎤⎢⎣⎡210112122221212121211001111x x u y u C R x x C R C R C R C R R R R x x i(2)设状态变量:L i x =1、c u x =2 而•=c L u C i根据基尔霍夫定律得:c L L i u i L i R u ++⋅=•整理得[]⎥⎦⎤⎢⎣⎡==⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎦⎤⎢⎣⎡21021211001011x x u y u L x x CL L R x x i3-1-2 如图所示电枢电压控制的它励直流电动机,输入为电枢电压a u 输出为电动机角速度ω,电动机轴上阻尼系数为f ,转动惯量J ,试列写状态方程和输出方程。
L题3-1-2图【解】:设状态变量为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡ωa i x x 21 其中a i 为流过电感上的电流,ω电动机轴上的角速度。
电动机电枢回路的电压方程为:b a a a a a e i R i L u +⋅+=•b e 为电动机反电势。
电动机力矩平衡方程为L D M f J M ++=•ωω由电磁力矩和反电势的关系,有ωe b c e =,a M D i c M =式中e c 为电动机反电势系数,M c 为电动机的转矩系数。
J 为电动机轴上粘性摩擦系数,f 电动机轴上等效转动惯量。
《现代控制理论》第3版(刘豹_唐万生)课后习题答案
(本题思路:使用教材 P41 方法,专门用来把传递函数转化为约旦标准型)
6
7
10(−1)
解:(1)由 () = (+1)(+3)可得到系统表达式为
6(+1)
−4
−
10
3
3
(2)() = (+2)(+3)2 = (+3)2 + +3 + +2 +
2
则状态空间表达式为:
.
1
0
1
0 1
0
.
[2 ] = [ 0
0
1 ] [2 ] + [0]
.
−3 −7 −5 3
1
3
1
= [2 3 1] [ 2 ]
3
相应的模拟结构图如下:
1
3
+
u
-
-
2
+
+
y
5
x3
x2
x1
7
3
1-6
(−)
(+)
已知系统传递函数(1)() = (+)(+) (2)() = (+)(+)
11
0
1
0 11
当1 = −1时,[ 3
0
2 ] [21 ] = − [21 ]
31
−12 −7 −6 31
10
解得: 21 = 31 = −11
(或令11
令11 = 1
11
1
1 = [21 ] = [−1]
31
王金城现代控制理论第一章_习题答案

王金城化工出版社第1章习题参考答案:1-1(a )选123123,,,,,y y y v v v 为状态变量,根据牛顿定律,对1M ,有()11112121dv M g K y K y y M dt---= 对2M ,有()()222123232dv M g K y y K y y M dt+---= 对3M ,有()33323433dv M g K y y K y M dt+--= 令312112233415263,,,,,dy dy dyx y x y x y x v x v x v dt dt dt=========,整理得 ()()()122214253641112334233251262322233,,,,,K K K x x x x x x x x xg M M K K K K K x K K xx x g x x x g M M M M M +====-++++=-++=-+()()()1221123222223433300010000001000000010000001100010000K K K M M x x g K K K K M M M K K K M M ⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥-⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥+-⎢⎥⎢⎥⎣⎦100000010000001000y x ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦(b )选12,12,,y y v v 为状态变量,根据牛顿定律,对1M ,有()11121111dv M g B v v K y M dt+--= 对2M ,有()22221212dv f M g B v B v v M dt+---= 令1211223142,,,dy dyx y x y x v x v dt dt ======,整理得 11113243134111,,K B Bxx x x x x x x g M M M ===--++ ,112434222B B B f x x x g M M M +=-++所以状态空间描述为1111111122220010000001000011100K B B xx g f M M M B B B M M M ⎡⎤⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥=++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦⎢⎥-⎢⎥⎣⎦⎣⎦10000100y x ⎡⎤=⎢⎥⎣⎦1-2(a )取电感电流i 和电容电压u 为状态变量,列回路方程122c rc c c u u R (i )u u R di L u u dt u du C dt R ⎧=+++⎪⎪⎪=+⎨⎪⎪=⎪⎩令12c x i,x u,y u ===()1212121212112121211r R R R R L(R R )L(R R )L(R R )xx u R C R RC(R R )C(R R )-⎡⎤⎡⎤⎢⎥⎢⎥+++⎢⎥⎢⎥=+⎢⎥⎢⎥--⎢⎥⎢⎥+++⎣⎦⎣⎦1222121212r R RR R y x u R R R R R R ⎡⎤=--+⎢⎥+++⎣⎦ (b )选择回路电流a i 和电枢角速度ω为状态变量,有aa a a ae di u R i L K dt ω=++ 力矩平衡方程:a a d J B K i ,dtωω+= 其中a K 为转矩常数 1a a e a a a a adi R K i u dt L L L ω=--+a a K d B i dt J J ωω=-- 令12a x i ,x ,ω==有10a e a aa a R K L L L xx u K B JJ -⎡⎤-⎡⎤⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥-⎣⎦⎢⎥⎣⎦ , []01y x ω==1-3 (1)传递函数为3221375Y(s )U(s )s s s =+++将传递函数中的公因子提出,于是有3123211375Y(s )s U(s )s s s----=+++ 按梅逊公式构建系统的状态变量图能控标准形:0100001057131x x ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦u []200y x =能观标准形:0052107001130x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦[]001y =x(2)传递函数为:2332132223123Y(s )s s s U(s )s s s s----++==++++ 按梅逊公式构建系统的状态变量图能控标准形:010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦[]210y x =能观标准形:003210010120x x u -⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦[]001y x =(3)传递函数为:3212332123324515471547Y(s )s s s s s s U(s )s s s s s s------+++---==+++++++ 按梅逊公式构建系统的状态变量图状态空间描述为:010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦[]514y x u =---+(4)①12121221212121b s b b s b s Y(s )U(s )s a s a a s a s ----++==++++ 状态空间描述为:1322140101xx u x a a x ⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦ ,[]21y b b x =②22121201200111s c Z(s )c c Y(s )c s c s c s s c c ---==++++ 状态空间描述为:332144000101x x y c c x x c c ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦ ,301z x c = 两系统串联,得112122332121440001000001000100x x a a x x u x x c c b b x x c c ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦(5)由G(z)有,y(k+3)+4y(k+2)+5y(k+1)+2y(k)=u(k)令12312x (k )y(k )x (k )y(k )x (k )y(k )=⎧⎪=+⎨⎪=+⎩ 1230100100102541x (k )x(k )x (k )u(k )x (k )⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥+=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦[]123100x (k )y(k )x (k )x (k )⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦(6)由G(z)有,y(k+3)+6y(k+2)+11y(k+1)+6y(k)=2u(k+2)+u(k+1)+2u(k)01001001061161x(k )x(k )u(k )⎡⎤⎡⎤⎢⎥⎢⎥+=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦[]123212x (k )y(k )x (k )x (k )⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦1-4 (a )化简系统结构图得系统状态空间描述:1234010000010024220025025x x x u x x ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦ []0100y x =(b) 化简系统结构图得系统状态空间描述:1112221323255223735353xx u ///x x u ////--⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ []110y x = []201y x =1-5 (1) 传递函数为21233212332322461246s s s s s G(s )s s s s s s ------++++==++++++ 能控标准形:010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦[]231y x =能观标准形:006210430121x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦[]001y x =(2)传递函数为24422431332132s s s G(s )s s s s -----+-+==++++ 能控标准形:01000001000001020301xx u ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦[]1300y x =-能观标准形:00021100030103000100x x u -⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥=+⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦[]0010y x = 1-6(1) 24512122123123(s )(s )G(s )(s )(s )(s )s s s ++-==++++++++状态空间描述:100102010031x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦,[]12122y x =- (2)223533313313(s )G(s )(s )(s )s s (s )+--==+++++++ 状态空间描述:310003010011x x u -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦,[]333y x =-- 1-7(1)∵31I A ()()λλλ-=++ 1213,λλ=-=-∴1003A -⎡⎤=⎢⎥-⎣⎦11111111,p Ap ,p λλ⎡⎤=-==⎢⎥⎣⎦,22222131,p Ap ,p λλ⎡⎤=-==⎢⎥-⎣⎦∴1111P ⎡⎤=⎢⎥-⎣⎦1111112P ---⎡⎤=-⎢⎥-⎣⎦ 11112B P B -⎡⎤==⎢⎥-⎣⎦∴11020312x x u ⎡⎤⎢⎥-⎡⎤=+⎢⎥⎢⎥-⎣⎦⎢⎥-⎢⎥⎣⎦(2)1230123I A ,,,λλλλ-==-=-=-∴100020003A -⎡⎤⎢⎥=-⎢⎥⎢⎥-⎣⎦111111111,p Ap ,p λλ⎡⎤⎢⎥=-==-⎢⎥⎢⎥-⎣⎦,2222212212,p Ap ,p λλ⎡⎤⎢⎥⎢⎥=-==-⎢⎥⎢⎥⎢⎥⎣⎦333331333,p Ap ,p λλ⎡⎤⎢⎥=-==-⎢⎥⎢⎥⎣⎦∴1111231132P ⎡⎤⎢⎥⎢⎥=---⎢⎥⎢⎥-⎢⎥⎣⎦137272304027162B P B -⎡⎤⎢⎥⎢⎥==--⎢⎥⎢⎥⎢⎥⎣⎦∴37271002020304000327162x x u ⎡⎤⎢⎥-⎡⎤⎢⎥⎢⎥=-+--⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎢⎥⎣⎦(3)519400433030114003433114j x j x j j ⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥-+⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦+⎢⎥⎢⎥⎣⎦1-8 (1)∵A 为友矩阵123012I A ,,λλλλ-====∴ 110010002A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 101112124P ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 1111B P B --⎡⎤⎢⎥==-⎢⎥⎢⎥⎣⎦ ∴100101010021x x u -⎡⎤⎡⎤⎢⎥⎢⎥=+-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(2)212331031I A ()(),,λλλλλλ-=--====310030001A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 120112111P ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 11335234B P B --⎡⎤⎢⎥==-⎢⎥⎢⎥-⎣⎦ ∴3101330305200134x x u -⎡⎤⎡⎤⎢⎥⎢⎥=+-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦1-9(1)110061031002P -⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦111000062300100111000152020233302100313000222AP AP -⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦1106203502BP B -⎡⎤⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦203640C CP ⎡⎤==⎢⎥⎣⎦ 11000621102203333502022xx u ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦203640y x ⎡⎤=⎢⎥⎣⎦ (2)①1111I A I P AP P P P AP P (I A)P λλλλ-----=-=-=-11I A P I A P P P I A I A λλλλ---=-=-=-∴特征值不变②1111G(s )C(sI A)B CP(sI P AP )P B ----=-=- 111C P(sI P AP )P B ---⎡⎤=-⎣⎦11111C P(sI )P PP APP B C(sI A )B -----⎡⎤=-=-⎣⎦∴传递函数不变1-10证明:11G (s )c(sI A)b -=- 12G (s )c(sI A)b -=- ∵T T TA A ,b c ,c b ===∴12T T T T T T TG (s )b (sI A )c b (sI )A c -⎡⎤=-=-⎣⎦ [11T T T T T Tb (sI A )c b (sI A)c --⎤⎡⎤=-=-⎦⎣⎦11TTc(sI A )b G (s )-⎡⎤=-=⎣⎦ ∵系统为单输入单输出,11T G (s )G (S )= ∴两者传递函数相同。
《现代控制理论》第3版课后习题答案

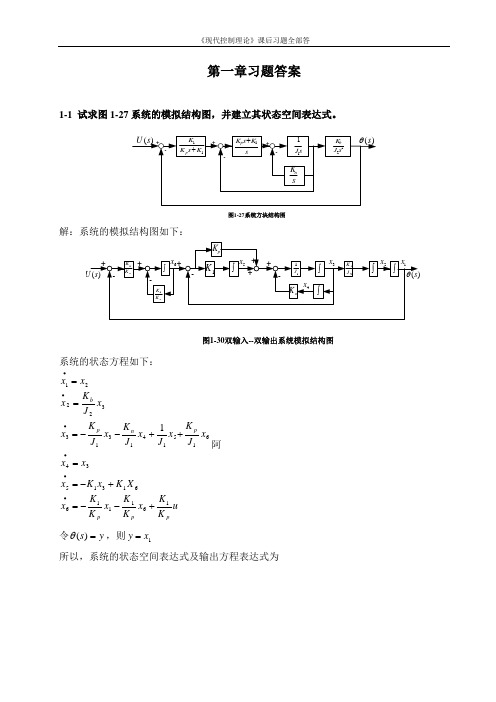
《现代控制理论参考答案》第一章答案1-1 试求图1—27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1—2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得 22213322222131111111111x R y x Cx C x x L x L R x u L x L x L R x =+-=+-=+--=••• 写成矢量矩阵形式为:1—4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵. 解:系统的状态空间表达式如下所示:1—5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有相应的模拟结构图如下:1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图 解:s s s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++= 1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘ (1) 画出其模拟结构图(2) 求系统的传递函数解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1—8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P(或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P )当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=14222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P ) 当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P 1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x 解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P 当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--23132313311201214p p p p p p解之得 3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P 约旦标准型1—10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1—11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1—12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1:解法2:求T ,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为 第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
《现代控制理论》课后习题全部答案(最完整打印版)
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
《现代控制理论》刘豹著(第3版)课后习题答案

第一章习题答案1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc ---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x C C L L R L L R x x x 。
1-5系统的动态特性由下列微分方程描述u u u y y y y 23375)2(......++=+++列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡321321321132100573100010x x x y u x x x x x x 。
相应的模拟结构图如下:573⎰⎰⎰uy+++---31x 2x 3x 211-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡432143214321313310411100000020*********x x x x y u x x x x x x x x1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图(2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W )1)(2)(3()3(2)3(2+++=+++=-s s s s s s A sI()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++---++-+++++=--)2)(1(150)3()3(2033)1)(2)(3(1)(21s s s s s s s s s s s s A sI ()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++---++-+++++=-=-)3)(12()3()3()1)(2)(3(1210)2)(1(150)3()3(2033)1)(2)(3(1)()(21s s s s s s s s s s s s s s s s s s s s B A sI s W ux[])1)(2()12()1)(2)(3(1)3)(12()3()3(100)()(1+++=+++⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=-=-s s s s s s s s s s s B A sI C s W uy 1-9将下列状态空间表达式化成约旦标准型(并联分解)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x (2)解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 1,332,1==λλ当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P 当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得 3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=101201011T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=-1102112101T⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=-4325183572131102112101B T⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=302413101201011110021CT约旦标准型x ~y ux ~x ~⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=302413432518100030013 1-12 已知差分方程为)(3)1(2)(2)1(3)2(k u k u k y k y k y ++=++++试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1:21112332)(2+++=+++=z z z z z z W)(11)(2001)1(k u k x k x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=+ [])(11)(k x k y =解法2:)(2)(3)()(3)(2)1()()1(2121221k x k x k y u k x k x k x k x k x +=+--=+=+ [])(23)()(10)(3210)1(k x k y k u k x k x =⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=+ 求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡--⎥⎦⎤⎢⎣⎡=-15041011321010111AT T [][]13101123-=⎥⎦⎤⎢⎣⎡-=CT 所以,状态空间表达式为[])(13)()(11)(1504)1(k z k y k u k z k z -=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡---=+第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
现代控制理论第一章答案
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:uKK x KK x KK x X K x K x x x x J Kx J x J K x J Kx x J K x x x ppppn pb 1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙65432116543211111111265432100000100000000000000010010000000000010x x x x x x y uK K x x x xx x K K KK K K J K J J K J KJ K x x x x x xp p p p n pb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
L1L2U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x Cx Cx x L x L R x uL x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000010111010x x x R y u L x x x CCL L R L L R x x x 。
《现代控制理论》习题解答 2016-5-18

2s 7 ( s 3)( s 4) 1-13 G ( s ) 1 s3
1 0 0 x 1 0 x 1-14 2 x 3 a2 0 4 a4 0 x y( z) 2( z 1) 2 1-15 u ( z ) ( z 3z 1)
10 s 26 ( s 2)( s 3)( s 4) 。 2s 10 ( s 2)( s 3)
0 x1 0 u1 y1 1 0 0 0 x2 ; 。 0 u2 y2 0 1 0 0 x3 b2 x4
x1 x2 x3 。 u ; (0 0 0 0 0 1) x4 x 5 x 6
1-04 设状态变量为 x1 i1 , x2 i2 , x3 uC ,状态方程, : x1 i1 , x2 i2 , x3 uC ,状态方程
2( s 2) ( s 1)( s 3) 并联 G ( s ) W1 ( s ) W2 ( s ) 1 s 1
2( s 3) ( s 2)( s 4) 。 s 1 s2
第二章习题解答
1 0 0 A 2-01 (1) 注意 A 0 1 0 1 0 1 2 1 0 A1t 1 1 t ,其中 A1 1 , A2 ,而 e L [( sI A1 ) ] e , 1 2 A2
1 ( s 1)( s 3) 1-18 串联 G ( s ) W2 ( s )W1 ( s ) 1 ( s 1)2 s 2 5s 7 ( s 2)( s 3)( s 4) ; 1 ( s 1)( s 2)
《现代控制理论》刘豹著(第3版)课后习题答案

《现代控制理论》刘豹著(第3版)课后习题答案《现代控制理论》刘豹著(第3版)课后习题答案第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:令,那么所以,系统的状态空间表达式及输出方程表达式为 1-2有电路如图1-28所示。
以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为: 1-3 参考例子1-3(P19). 1-4 两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由以下微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,那么有相应的模拟结构图如下: 1-6 (2)系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7 给定以下状态空间表达式‘ (1)画出其模拟结构图(2)求系统的传递函数解:(2) 1-8 求以下矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得 1-9将以下状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型 1-10 两系统的传递函数分别为W1(s)和W2(s) 试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结 1-11 (第3版教材)如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解: 1-11(第2版教材)如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12 差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案 2-4 用三种方法计算以下矩阵指数函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:uKK x KK x KK x X K x K x x x x J Kx J x J K x J Kx x J K x x x ppppn pb 1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙65432116543211111111265432100000100000000000000010010000000000010x x x x x x y uK K x x x xx x K K KK K K J K J J K J KJ K x x x x x xp p p p n pb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
L1L2U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x Cx Cx x L x L R x uL x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000010111010x x x R y u L x x x CCL L R L L R x x x 。
1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
1u 2u 图1-30双输入--双输出系统模拟结构图解:系统的状态空间表达式如下所示:[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡4321214321345612432101010000000100100010x x x x y u b bx x x x a a a a a a xx xx⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+-=-34561201010001)(a a a s a a s a s A sI ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+-=-=--21134561210000001010001)()(b b a a a s a a s a s B A sI s W ux[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--+-=-=--2113456121000000010100010101)()(b b a a a sa a s a s B A sI C s W uy1-5系统的动态特性由下列微分方程描述u u u y y y y 23375)2(......++=+++列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡321321321132100573100010x x x y u x x x x x x 。
相应的模拟结构图如下:1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡43214321432131331041110000020000300013x x x x y u x x x x x xx x1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32132132110210311032010x x x y u x x x x x x‘(1) 画出其模拟结构图 (2) 求系统的传递函数解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W )1)(2)(3()3(2)3(2+++=+++=-s s s s s s A sI()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++---++-+++++=--)2)(1(150)3()3(2033)1)(2)(3(1)(21s s s s s s s s s s s s A sI ()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++---++-+++++=-=-)3)(12()3()3()1)(2)(3(1210)2)(1(150)3()3(2033)1)(2)(3(1)()(21s s s s s s s s s s s s s s s s s s s s B A sI s W ux[])1)(2()12()1)(2)(3(1)3)(12()3()3(10)()(1+++=+++⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=-=-s s s s s s s s s s s B A sI C s W uy1-8 求下列矩阵的特征矢量 (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 06116671223123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I解之得:3,2,1321-=-=-=λλλ 当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P(或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P )当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P ) 当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡3212132132111021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I1,332,1==λλ 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得 3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=101201011T ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=-112112101T⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=-432518357213112112101B T ⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=30241310120101111021CT约旦标准型x ~y u x ~x~⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3024134325181000300131-10 已知两系统的传递函数分别为W 1(s)和W 2(s)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=2102111)(1s s s s s W ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++=0114131)(2s s s s W试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++++++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++==)2)(1(1)1(1)4)(3)(2(75)3)(1(121021110114131)()()(2212s s s s s s s s s s s s s s s s s s W s W s W(2)并联联结⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++±⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++=±=01141312102111)()()(11s s s s s s s s W s W s W1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=210111)(1s s s s W ⎥⎦⎤⎢⎣⎡=10012)s (W 求系统的闭环传递函数 解:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=2101111001210111)()(211s s s s s s s W s W⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-++=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-++=+2301121001210111)()(1s s s s s s s s I s W s W I[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++++=+-320)3(12112012331)()(121s s s s s s s s s s s s s s s W s W I[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-+=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+-+++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++++++=+=-310)3(1211101)1)(2(3312111112012331)()()()(1121s s s s s s s s s s s s s s s s s s s s s s s s W s W s W I s W1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=2121111s s s )s (W ⎥⎦⎤⎢⎣⎡=10012)s (W 求系统的闭环传递函数解:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=212111100121211111s s s s s s )s (W )s (W ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-++=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+=+232112100121211111s s s s s s s s )s (W )s (W I []⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+++++=+-1221232512111s s s s s s s )s (s )s (W )s (W I[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++-++++++++-+++++=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++-++++-++++-++++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+++++=+=-252)25)(2(66251)25()2()83()1(1121)2(222)2(1)2(32)2(325)1(2112112212325)1()()()()(222322222221111s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s s W s W s W I s W1-12 已知差分方程为)(3)1(2)(2)1(3)2(k u k u k y k y k y ++=++++试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1:21112332)(2+++=+++=z z z z z z W)(11)(2001)1(k u k x k x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=+ [])(11)(k x k y =解法2: )(2)(3)()(3)(2)1()()1(2121221k x k x k y u k x k x k x k x k x +=+--=+=+ [])(23)()(10)(3210)1(k x k y k u k x k x =⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=+ 求T ,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T所以 ⎥⎦⎤⎢⎣⎡-=1011T⎥⎦⎤⎢⎣⎡---=⎥⎦⎤⎢⎣⎡-⎥⎦⎤⎢⎣⎡--⎥⎦⎤⎢⎣⎡=-15041011321010111AT T[][]13101123-=⎥⎦⎤⎢⎣⎡-=CT所以,状态空间表达式为 [])(13)()(11)(1504)1(k z k y k u k z k z -=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡---=+。