大学物理-刚体角动量与角动量守恒定律
合集下载
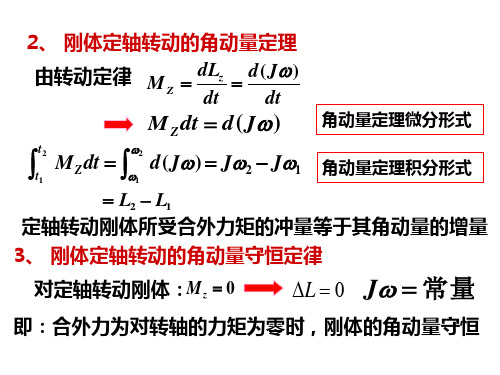
角动量和角动量守恒定律

恒矢量
M 0
质点或质点系所受对参考点 O 的合外力矩为零 时,质点或系统对该参考点 O 的角动量为一恒矢量 . (1) 不受外力
(2) 力臂 d 0 (3) F // r
3 – 2 角动量 角动量守恒动量守恒。
质点在有心力作用下的运动:r 与 F 同向或
第三章 刚体力学
dp dL F, ? Lrp dt d t dL d dp dr (r p) r p dt dt d t dt dr dL dp v, v p 0 r r F dt dt dt 作用于质点的合力对参考点 O dL 的力矩 ,等于质点对该点 O 的角 M dt 动量随时间的变化率 .
L mR
2 32 12
2g 12 ( sin ) R
L mR (2g sin )
Lx 、Ly 、Lz 质点对x、y、z 轴的角动量 M y、 M x、 M z 质点对x、y、z 轴的力矩
3 – 2 角动量 角动量守恒定律
第三章 刚体力学
1)求角动量和力矩某一方向的分量的方法
L ( xi yj zk ) ( pxi py j pz k ) M (xi yj zk) (Fxi Fy j Fz k)
rb
通过一点(力心)—— 力对力心的力矩为零。
当力 F 的作用线始终
vb
ra mva rb mvb ra v b va va rb
ra
r
F
3 – 2 角动量 角动量守恒定律
第三章 刚体力学
举例: 将一个质量为m的小球系在轻绳的一端,放在 光滑的水平桌面上,轻绳的另一端从桌面中间的一 光滑小孔穿出。先使小球以一初速度在水平桌面上 作圆周运动,然后向下拉绳。 动画演示:模拟实验
定轴转动的角动量定理 角动量守恒定律
Iz
( 1 ml 2 12
mr 2 )
代入得 mgr cos 2mr dr
dt
v
dr dt
g cos 2
g
2
cos
t
7 lg 24v 0
cos(12v 7l
0t
)
L 0 J 常量
即:合外力为对转轴的力矩为零时,刚体的角动量守恒
讨论:
a.对于绕固定转轴转动的刚体,因J保持不变, 当合外力矩为零时,其角速度恒定。
当M z 0时, J =恒量 =恒量
b.若系统由若干个刚体构成,当合外力矩为零时,系
统的角动量依然守恒。J 大→ 小, J 小→ 大。
当M z 0时, Lz J11 J22 恒量
。这样,棒与物体相撞时,它们组成的系统所受的对
转轴O的外力矩为零,所以,这个系统的对O轴的角
动量守恒。我们用v表示物体碰撞后的速度,则
1
ml 2
mvl
1
ml 2
3
3
(2)
式中’为棒在碰撞后的角速度,它可正可负。
’取正值,表示碰后棒向左摆;反之,表示向右
摆。
第三阶段是物体在碰撞后的滑行过程。物体作匀减 速直线运动,加速度由牛顿第二定律求得为
例12、如图所示,长为L,质量为m1的均匀细棒 能绕一端在铅直平面内转动。开始时,细棒静止于
垂直位置。现有一质量为m2的子弹,以水平速度v0
射入细棒下断而不复出。求细棒和子弹开始一起运 动时的角速度?
题意分析:由于子弹射入细棒的时间极为短促,我们 可以近似地认为:在这一过程中,细棒仍然静止于垂 直位置。因此,对于子弹和细棒所组成的系统(也就 是研究对象)在子弹射入细棒的过程中,系统所受的 合外力(重力和轴支持力相等)对转轴O的力矩都为 零。根据角动量守恒定律,系统对于O轴的角动量守 恒。
角动量 角动量守恒定律

角动量与线动量关系
角动量与线动量的关系
角动量是线动量在物体绕某点或某轴 转动时的表现形式,二者之间存在密 切关系。
动量守恒定律
在不受外力作用的情况下,物体的总 动量(包括线动量和角动量)保持不 变,即动量守恒定律。
02
角动量守恒定律
守恒条件及适用范围
守恒条件
当系统不受外力矩作用时,系统的角动量守恒。即在没有外力矩的情况下,系统内部各部分之间的相 互作用力不会导致系统总角动量的改变。
06
总结与展望
课程内容回顾与总结
角动量的定义与性
质
角动量是物体绕某点或某轴转动 的动量,具有矢量性质,其大小 与物体的质量、速度和转动半径 有关。
角动量守恒定律的
表述
在没有外力矩作用的情况下,系 统内的角动量保持不变,即角动 量守恒。
角动量守恒定律的
应用
角动量守恒定律在天体物理、刚 体转动、分子运动等领域有广泛 应用,如行星运动、陀螺仪工作 原理等。
对未来研究方向的展望
角动量守恒定律在复 杂系统较成熟,但在复 杂系统中的应用还有待深入研究, 如多体问题、非线性问题等。
角动量与其他物理量 的关系研究
角动量与能量、动量等物理量之 间存在一定的联系,未来可以进 一步探讨它们之间的关系,以及 如何利用这些关系解决实际问题。
在机械工程中,飞轮储能系统被应用 于能量回收和节能领域。飞轮储能系 统利用刚体定轴转动的角动量守恒定 律,通过加速和减速飞轮来储存和释 放能量。这种储能方式具有高效率、 环保等优点,在电动汽车、风力发电 等领域具有广阔的应用前景。
04
质点和质点系相对于固定 点角动量守恒
质点相对于固定点角动量定义和性质
双星系统由两颗互相绕转的恒星组成。在双星系统中,两颗恒星的角动量守恒,因此它们的轨道周期、距离和质量之 间存在一定关系。
定轴转动刚体的角动量守恒
量子力学
在量子力学中,角动量是一个重要的物理量,描述了粒子的转动状态,角动量守 恒是粒子运动的基本规律之一。
在工程学中的应用
机械系统设计
在机械系统设计中,角动量守恒是重要的设计准则之一,用 于确保机械系统的稳定性和可靠性。
航空航天工程
在航空航天工程中,飞行器的稳定性和控制需要遵循角动量 守恒的原理,通过合理设计飞行器的结构和姿态控制系统, 可以保持飞行器的稳定。
定轴转动刚体的角动量守恒
contents
目录
• 引言 • 定轴转动刚体的角动量 • 角动量守恒的推导 • 角动量守恒的应用 • 结论
01 引言
主题简介
角动量守恒是物理学中的一个基 本原理,它描述了刚体绕固定轴 转动的角动量保持不变的规律。
在定轴转动的情况下,刚体的角 动量是一个重要的物理量,它与 刚体的转动惯量和角速度有关。
01
02
03
预测运动规律
角动量守恒是确定刚体转 动运动规律的重要依据, 可以用来预测刚体的运动 轨迹和周期等。
指导实验设计
在实验设计中,可以利用 角动量守恒来设计实验装 置,确保实验结果的准确 性和可靠性。
解决实际问题
角动量守恒在解决实际问 题中具有广泛的应用,如 陀螺仪、航天器姿态控制 等。
04 角动量守恒的应用
角动量守恒定律在许多领域都有 广泛的应用,如天文学、力学、
航天工程等。
角动量守恒的定义
角动量守恒是指刚体在不受外力矩作用或者外力矩的矢量和为零的情况下,刚体绕 固定轴转动的角动量保持不变。
角动量是描述刚体转动状态的物理量,它等于刚体的转动惯量与角速度的乘积。
在定轴转动的情况下,刚体的角动量是一个常数,不随时间变化。
在量子力学中,角动量是一个重要的物理量,描述了粒子的转动状态,角动量守 恒是粒子运动的基本规律之一。
在工程学中的应用
机械系统设计
在机械系统设计中,角动量守恒是重要的设计准则之一,用 于确保机械系统的稳定性和可靠性。
航空航天工程
在航空航天工程中,飞行器的稳定性和控制需要遵循角动量 守恒的原理,通过合理设计飞行器的结构和姿态控制系统, 可以保持飞行器的稳定。
定轴转动刚体的角动量守恒
contents
目录
• 引言 • 定轴转动刚体的角动量 • 角动量守恒的推导 • 角动量守恒的应用 • 结论
01 引言
主题简介
角动量守恒是物理学中的一个基 本原理,它描述了刚体绕固定轴 转动的角动量保持不变的规律。
在定轴转动的情况下,刚体的角 动量是一个重要的物理量,它与 刚体的转动惯量和角速度有关。
01
02
03
预测运动规律
角动量守恒是确定刚体转 动运动规律的重要依据, 可以用来预测刚体的运动 轨迹和周期等。
指导实验设计
在实验设计中,可以利用 角动量守恒来设计实验装 置,确保实验结果的准确 性和可靠性。
解决实际问题
角动量守恒在解决实际问 题中具有广泛的应用,如 陀螺仪、航天器姿态控制 等。
04 角动量守恒的应用
角动量守恒定律在许多领域都有 广泛的应用,如天文学、力学、
航天工程等。
角动量守恒的定义
角动量守恒是指刚体在不受外力矩作用或者外力矩的矢量和为零的情况下,刚体绕 固定轴转动的角动量保持不变。
角动量是描述刚体转动状态的物理量,它等于刚体的转动惯量与角速度的乘积。
在定轴转动的情况下,刚体的角动量是一个常数,不随时间变化。
刚体的角动量守恒

轴摩擦及空气阻力很小。
受合外力矩为零
角动量守恒
恒矢量
其中转动惯量 为常量
基
万
若将回转体转轴指向任一方向
座
向
使其以角速度 高速旋转
支
架
则转轴将保持该方向不变
而不会受基座改向的影响
角动角量动守量守恒恒的的另另一类一现类象 现象
乘积 保持不变, 变小则 变大, 变大则 变小。
用外力矩 启动转盘后 撤除外力矩
刚体的角动量定理
回忆质点的角动量定理
(微分形式)
(积分形式)
合外力矩 冲量矩
(微分形式)
角动量的时间变化率
(积分形式)
角动量的增量
刚体系统的角动量定理
若一个系统包含多个共轴刚体或平动物体
系统的总合外力矩 ∑
∑ 系统的总角动量的变化率
系统的总冲量矩
例如
求角加速度
∑ 系统:
总合外力矩 ∑
对O的角动量 对O的角动量
满足什么条件时,小球(视为
小球的质量相等
质点)摆至铅垂位置与棒弹碰而小
两者共面共转轴
球恰好静止。直棒起摆角速度
水 平 静 止 释 放
静
悬
弹碰
忽略摩擦
弹碰过程能量守恒
对摆球、直棒系统
小球下摆阶段 从水平摆到弹碰即将开始,
由动能定理得
弹碰阶段 球、棒相碰瞬间在铅垂位置,
系统受合外力矩为零,角动量守恒。 刚要碰时系统角动量 刚碰过后系统角动量
初态角动量
末态角动量
得
木棒 子弹
联立解得
守恒例题二 以弹、棒为系统 击入阶段 子弹击入木棒瞬间,系统在 铅直位置,受合外力矩为零,角动量守恒。 该瞬间之始 该瞬间之末
角动量角动量守恒定律
R1
dr r
l
I r dm
2 m
R2
R1
2 l r dr
3
l
2
4 ( R2 R14 )
m 圆筒的体密度 2 , R2 R, I m R2 2 若R1 R2 R, I m R2
1 2 I m( R2 R12 ) 2
刚体绕OZ轴转动的角动量
a)力矩、角动量都是瞬时量,它们只能针对某 注意: 一时刻而言,它们都不是时间的累积效应。 b)力矩、角动量都是相对量,都必须指明它们 是相对于哪个轴或哪个点。 强调:对于刚体的定轴转动,我们只能用角动量来 描述,而不能用动量来描述。
8
3.转动惯量 1 .定义 刚体对固定轴的转动惯量等于各质元质量与其至 转轴的垂直距离的平方的乘积之和。
I ( Δmiri2 )
I是描述刚体转动惯性大小的物理量。
刚体的转动惯量与哪些物理量有关? ①.与刚体质量有关。 ②.与质量对轴的分布有关。 ③.与轴的位置有关。 在(SI)中,I 的单位:kgm2 量纲:ML2
9
2 .转动惯量的计算
Δmiri2 ) Ii 分立质点系 I (
质量连续分布的刚体
10
例2:半径为 R 质量为 M 的圆环,绕垂直于圆环平面 的质心轴转动,求转动惯量I。 解:分割质量元 dm圆环上各质量元到轴的距离相等,
M
I
0
R dm R
2
2 M 0
2 dm MR M
绕圆环质心轴的转动惯量为
o
R
dm
I MR
2
例2:在无质轻杆的 b 处 3b 处各系质量为 2m 和 m 的质点,可绕 o 轴转动,求:质点系的转动惯量I。 解:由转动惯量的定义
dr r
l
I r dm
2 m
R2
R1
2 l r dr
3
l
2
4 ( R2 R14 )
m 圆筒的体密度 2 , R2 R, I m R2 2 若R1 R2 R, I m R2
1 2 I m( R2 R12 ) 2
刚体绕OZ轴转动的角动量
a)力矩、角动量都是瞬时量,它们只能针对某 注意: 一时刻而言,它们都不是时间的累积效应。 b)力矩、角动量都是相对量,都必须指明它们 是相对于哪个轴或哪个点。 强调:对于刚体的定轴转动,我们只能用角动量来 描述,而不能用动量来描述。
8
3.转动惯量 1 .定义 刚体对固定轴的转动惯量等于各质元质量与其至 转轴的垂直距离的平方的乘积之和。
I ( Δmiri2 )
I是描述刚体转动惯性大小的物理量。
刚体的转动惯量与哪些物理量有关? ①.与刚体质量有关。 ②.与质量对轴的分布有关。 ③.与轴的位置有关。 在(SI)中,I 的单位:kgm2 量纲:ML2
9
2 .转动惯量的计算
Δmiri2 ) Ii 分立质点系 I (
质量连续分布的刚体
10
例2:半径为 R 质量为 M 的圆环,绕垂直于圆环平面 的质心轴转动,求转动惯量I。 解:分割质量元 dm圆环上各质量元到轴的距离相等,
M
I
0
R dm R
2
2 M 0
2 dm MR M
绕圆环质心轴的转动惯量为
o
R
dm
I MR
2
例2:在无质轻杆的 b 处 3b 处各系质量为 2m 和 m 的质点,可绕 o 轴转动,求:质点系的转动惯量I。 解:由转动惯量的定义
大学物理教程-刚体的定轴转动
刚体最简单的运动形式是: 平动和定轴转动。
大学物理教程
哈尔滨工业大学(威海)
5.1 刚体的运动 Harbin Institute of Technology at Weihai
1.平动:
刚体在平动时,在任意一段时间内,刚体
中所有质点的位移都是相同的。而且在任何
时刻,各个质点的速度和加速度也都是相同
5.2.1 对轴的力矩
M ro F (r rz ) F
M z (r F ) z r (F Fz )z r F
M z rF sin r F rF
➢ 说明: ① 只有垂直于轴的分量(或在转动平面内的分量)
才能产生沿轴方向的力矩! ② 作用点到轴的垂直距离决定对轴的力矩
大学物理教程
例3. 圆环绕中心轴旋转的转动惯量。
解: 选圆环上dl长度质量微元dm,
设线密度为 m 2 R
dl
m R
Jz R2 d m R2 d l
O
R22 R
mR2
大学物理教程
延伸:
薄壁圆筒: J mR2
哈尔滨工业大学(威海)
5.2 刚体定轴转动定律 Harbin Institute of Technology at Weihai
(A)
(B)
解: (A)
M J
FR 1 mR2
2F mR
2
2F
mR
a R 2F / m
R
R
m
m
(B) m1g T m1a
TR J 1 mR2
2
a R
m1
g
m1
1 2
m
R
a
m1
g
m1
1 2
m
恒力 F
大学物理教程
哈尔滨工业大学(威海)
5.1 刚体的运动 Harbin Institute of Technology at Weihai
1.平动:
刚体在平动时,在任意一段时间内,刚体
中所有质点的位移都是相同的。而且在任何
时刻,各个质点的速度和加速度也都是相同
5.2.1 对轴的力矩
M ro F (r rz ) F
M z (r F ) z r (F Fz )z r F
M z rF sin r F rF
➢ 说明: ① 只有垂直于轴的分量(或在转动平面内的分量)
才能产生沿轴方向的力矩! ② 作用点到轴的垂直距离决定对轴的力矩
大学物理教程
例3. 圆环绕中心轴旋转的转动惯量。
解: 选圆环上dl长度质量微元dm,
设线密度为 m 2 R
dl
m R
Jz R2 d m R2 d l
O
R22 R
mR2
大学物理教程
延伸:
薄壁圆筒: J mR2
哈尔滨工业大学(威海)
5.2 刚体定轴转动定律 Harbin Institute of Technology at Weihai
(A)
(B)
解: (A)
M J
FR 1 mR2
2F mR
2
2F
mR
a R 2F / m
R
R
m
m
(B) m1g T m1a
TR J 1 mR2
2
a R
m1
g
m1
1 2
m
R
a
m1
g
m1
1 2
m
恒力 F
大学物理角动量守恒定律解析

dm’
dF1
m
dF2
卫星 m 对地心 o 角动量守恒
h2
h1 m
mv1R h1 mv2 R h2
v2
R h1 R h2
v1
6378 439 6378 2384
8.1
6.3kms
1
增加通讯卫星的可利用率
探险者号卫星偏心率高
近地
h1 160.9km
直升飞机的尾翼要安装螺旋桨?
茹科夫斯基凳实验 为什么银河系呈旋臂盘形结构? 体操运动员的“晚旋” 芭蕾、花样滑冰、跳水…...
例. 一半径为R、质量为 M 的转台,可绕通过其中心的 竖直轴转动, 质量为 m 的人站在转台边缘,最初人和 台都静止。若人沿转台边缘跑一周 (不计阻力),相对 于地面,人和台各转了多少角度?
v1 3.38104 kms1
t小很快掠过
远地
h1 2.03105 km v1 1225kms1
t大充分利用
地球同步卫星的定点保持技术 卫星轨道平面与地球赤道平面倾角为零
严格同步条件 轨道严格为圆形 运行周期与地球自转周期完全相同 (23小时56分4秒)
地球扁率,太阳、月球摄动引起同步卫星星下点漂移 (p.43 图3.5-8) 用角动量、动量守恒调节 ~ 定点保持技术 研究微观粒子相互作用规律 自学教材P.94[例五]
解:选地面为参考系,设对转轴
m
人:J , ; 台:J ´, ´
J mR2
J
1 2
MR 2
系统对转轴合外力矩为零,
角动量守恒。以向上为正:
R
M
J J 0 2m
M
设人沿转台边缘跑一周的时间为 t:
dF1
m
dF2
卫星 m 对地心 o 角动量守恒
h2
h1 m
mv1R h1 mv2 R h2
v2
R h1 R h2
v1
6378 439 6378 2384
8.1
6.3kms
1
增加通讯卫星的可利用率
探险者号卫星偏心率高
近地
h1 160.9km
直升飞机的尾翼要安装螺旋桨?
茹科夫斯基凳实验 为什么银河系呈旋臂盘形结构? 体操运动员的“晚旋” 芭蕾、花样滑冰、跳水…...
例. 一半径为R、质量为 M 的转台,可绕通过其中心的 竖直轴转动, 质量为 m 的人站在转台边缘,最初人和 台都静止。若人沿转台边缘跑一周 (不计阻力),相对 于地面,人和台各转了多少角度?
v1 3.38104 kms1
t小很快掠过
远地
h1 2.03105 km v1 1225kms1
t大充分利用
地球同步卫星的定点保持技术 卫星轨道平面与地球赤道平面倾角为零
严格同步条件 轨道严格为圆形 运行周期与地球自转周期完全相同 (23小时56分4秒)
地球扁率,太阳、月球摄动引起同步卫星星下点漂移 (p.43 图3.5-8) 用角动量、动量守恒调节 ~ 定点保持技术 研究微观粒子相互作用规律 自学教材P.94[例五]
解:选地面为参考系,设对转轴
m
人:J , ; 台:J ´, ´
J mR2
J
1 2
MR 2
系统对转轴合外力矩为零,
角动量守恒。以向上为正:
R
M
J J 0 2m
M
设人沿转台边缘跑一周的时间为 t:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
均对同一固定轴而言;
(2)非刚体,J变化,tt12M d(m N s),角动量(kgm2/S)
三 、角动量定理守恒定律
刚体绕轴转动时,若合外力矩 M 0
MdLd(J)0
dt dt
J常量
角动量守恒定律:当物体所受合外力矩等于零时,物体的角动量保持不变。
§2-4 刚体角动量和角动量守恒定律
一、 动量矩、冲量矩
L
1. 角动量(动量矩)
定义:质点对点的角动量为
L r P r (m v )大小
方向
Lrm sivn
r v
O
质点对圆心的角动量大小
Lprmvr
v
rm
L
质点对圆心O 的角动量方向如图
刚体对转轴的角动量
LJ
大小 J
方向 与的方向一致。
讨论:
(1)对于刚体,J 不变 不变,刚体作匀速转动。 (2)对于非刚体,J变,也变,但乘积 J不变,
J11 J22
(3)可扩展为系统, 当Mz 0时,
Jii 常量
i
L zJ11J22恒量
对同一轴,同一惯性系而言。可解决一些碰撞,质点和刚体碰撞等问题。 若系统内既有平动也有转动现象发生,若对某一定轴的合外力矩为零,则系统 对该轴的角动量守恒。
p
o
r
m
由几个物体组成的系统,如果它们对同一给定轴的角动量分别
为J1、1 J2、2…,则该系统对该轴的角动量为:
Lz Jii i1,2,
i
2. 冲量矩
t2
Mdt
t1
是矢量,是角动量变化的量度, 反映力矩对时间的累积效应
二、 定轴转动刚体的角动量定理
刚体定轴转动定律:
Mz
d J
dt
对于系统还有
M Zdd LtZd dt i Jii
JA=10kgm2,B的转动惯量为JB=20kgm2 。开始时A轮的转速为600r/min,B轮
静止。C为摩擦啮合器。求两轮啮合后的转速;在啮合过程中,两轮的机械
能有何变化?
A
B
A
B
C
C
A
解以飞轮A、B和啮合器C作为一系统来考虑,在啮合过程中,系统受到 轴向的正压力和啮合器间的切向摩擦力,前者对转轴的力矩为零,后者对 转轴有力矩,但为系统的内力矩。系统没有受到其他外力矩,所以系统的 角动量守恒。按角动量守恒定律可得
M
J
dWMd Mdt
Fma
M J
FdtPP0
MdtLL0
Fdx12m2v12m02v Md1 2J21 2J0 2
四 、举例
例题1 一匀质细棒长为l ,质量为m,可绕通过其端点O的水平轴转动,
如图所示。当棒从水平位置自由释放后,它在竖直位置上与放在地面上的物体
相撞。该物体的质量也为m ,它与地面的摩擦系数为 。相撞后物体沿地面
(4)动量、角动量、机械能守恒三大定律在原子内部亦适用。
(5)平动和刚体定轴转动的公式有对应关系,便于类比记忆。
直线运动与定轴转动规律对照
质点的直线运动
v dx dt
a
dv dt
d2 dt
x
2
Pmv
EK
1 mv2 2
F
m
dWFdx Fdt
刚体的定轴转动
d dt
d
dt
d2
dt2
LJ
EK
1 2
J2
在外力矩作用下,从 t0 t 角动量从 Lz0J0变为 LZ J则由
Mz
d J
dt
得角动量定理微分形式
MdtdJ()
两边积分得
t
Mdt
t0
JJ0
t
M t0
dt
为
t t t0时间内力矩M 对给定轴的冲量矩。
角动量定理:转动物体所受合外力矩的冲量矩等于在这段时间内转动物体 角动量的增量。
说明 (1)M、J、ω
滑行一距离s而停止。求相撞后棒的质心C 离地面的最大高度h,并说明棒在碰
撞后将向左摆或向右摆的条件。
O
解: 这个问题可分为三个阶段进行分析。第一阶
段是棒自由摆落的过程。机械能守恒。我们把棒在竖
直位置时质心所在处取为势能零点,用表示棒这时
的角速度,则
h
mg l 1J2= 1 1m2l 2(1)
22
23
1.3 214 0 J
J A A J B B = J A J B
为两轮啮合后共同转动的角速度,于是
J
A
A
J B B
JA JB
以各量的数值代入得
2.9 0 ra/s d
或共同转速为
n 2r 0 /m 0 in
在啮合过程中,摩擦力矩作功,所以机械能不守恒,部分机械能 将转化为热量,损失的机械能为
E1 2JA 2 A1 2JB B 21 2JAJB 2
向左摆;反之,表示向右摆。
第三阶段是物体在碰撞后的滑行过程。物体作匀减速直线运动,加速度
由牛顿第二定律求得为
m gma
(3)
由匀减速直线运动的公式得
0v2 2as
亦即
v2 2gs
(4)
由式(1)、(2)与(4)联合求解,即得
3gl3 2gs
l
(5)
当‘取正值,则棒向左摆,其条件为 3gl3 2g> s 0 亦 即l >6 s;
当’取负值,则棒向右摆,其条件为 3gl3 2gs0亦即l<6 s
棒的质心C上升的最大高度,与第一阶段相似,可由机械能守恒定律求得:
mgh11m2l2
(6)
23
把式(5)代入上式,所求结果为
hl3s 6sl
2
例题2 工程上,两飞轮常用摩擦啮合器使它们以相同的转速一起转动
。如图所示,A和B两飞轮的轴杆在同一中心线上,A轮的转动惯量为
第二阶段是碰撞过程。因碰撞时间极短,自由的冲力极大,物体虽然 受到地面的摩擦力,但可以忽略。这样,棒与物体相撞时,它们组成的系
统所受的对转轴O 的外力矩为零,所以系统的对O 轴的角动量守恒。我们
用v 表示物体碰撞后的速度,则
1m2l mv l1m2l (2)
3
3
式中’ 棒在碰撞后的角速度,它可正可负。 ’取正值,表示碰后棒