FANUC 0i-D 系统参数设定的基本方法
FANUC-(0i-D)系统维修与调整
系统报警可分为下列3类。 1,软件检测的报警 主要由CNC系统软件来检测软件的异常。典型的异常原因: •检测基于内部状态监视软件的处理/数据的异常 •数据/指令范围外的存取 •除以零 •堆栈上溢 •堆栈下溢 •DRAM和数校验错误 2,硬件检测的报警 主要由硬件来检测硬件的异常。典型的异常原因: •奇偶校验错误(DRAM、SRAM、超高速缓存) •总线错误 •电源报警 •FSSB电缆断线
0i--TD 双路径系统配置。
0i Mate --D 系统配置 。
硬件概要:
n综合连接图:
综合连接图:
n系统硬件及更换方法 显示屏背视图:
CNC主板的规格:
CNC主电路板:
电源、轴卡安装的位置:
FROM/SRAM安装的位置:
系统方块图:
Ø系统报警 (SYS ALM***) 当系统出现异常状态时,进入系统报警状态画面,同时执行下列操作。 断开伺服、主轴放大器的励磁 切断I/O Link的通信
(3) 更换连接于通道号z(1-4)的I/O Link线上的组号yy(0-15)的从控设备。
(4) 通过上述确认仍然不能解决问题时,可能是由于其他方面的原因,请将显示出错误发生时的情况 (包括显示信息、系统配置、操作、发生的时机、发生频次等)的内部错误代码告知我公司。
Ø主板LED显示:
① 系统发生报警时的报警LED显示(红色LED)。 7段码LED显示,参照维修手册附录E。
3,其他报警
•由周边软件检测的报警
•伺服软件
•PMC软件(I/O Link通信异常等)
系统报警信息被保存在SRAM中,SRAM中可以保存最近发生的2次系统报警信息。 系统报警信 息可以从IPL画面输出到存储卡中。 进入IPL画面操作: 1,在按“-”和“.键的同时,给系统通电。系统显示IPL画面如下:
FANUC 0i D系统刀具寿命监控的调试总结
FANUC 0i D系统刀具寿命监控的调试总结
一、功能理解
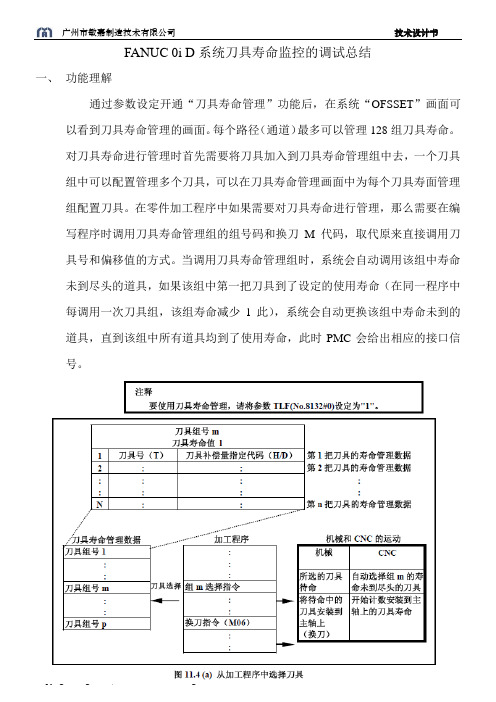
通过参数设定开通“刀具寿命管理”功能后,在系统“OFSSET”画面可以看到刀具寿命管理的画面。
每个路径(通道)最多可以管理128组刀具寿命。
对刀具寿命进行管理时首先需要将刀具加入到刀具寿命管理组中去,一个刀具组中可以配置管理多个刀具,可以在刀具寿命管理画面中为每个刀具寿面管理组配置刀具。
在零件加工程序中如果需要对刀具寿命进行管理,那么需要在编写程序时调用刀具寿命管理组的组号码和换刀M代码,取代原来直接调用刀具号和偏移值的方式。
当调用刀具寿命管理组时,系统会自动调用该组中寿命未到尽头的道具,如果该组中第一把刀具到了设定的使用寿命(在同一程序中每调用一次刀具组,该组寿命减少1此),系统会自动更换该组中寿命未到的道具,直到该组中所有道具均到了使用寿命,此时PMC会给出相应的接口信号。
二、相关参数
1、TLF(NO.8132#0)设定为“1”,打开刀具寿命管理功能。
三、PMC程序
四、刀具寿命管理注意问题
1、同一组刀具寿命管理组中的刀具不要用同一个T号,否则对刀具组计数时,
该组刀具所有的寿命都减少1次。
模拟主轴

FANUC 0i Mate-D模拟主轴设置调试方法总结:2011-11-19 09:40:27| 分类:发那科数控系统资 | 标签:md调试资料|举报|字号订阅有关模拟主轴参数:3701#1 =13716#0=03717 =1 (报警1240号,通过设3799#1消除)3799#1=18133#5=1 (不使用主轴串行输出)3736 =40953741-3743 最大主轴转速关于模拟主轴当使用模拟主轴时,系统可以提供—10v~~+10v电压由系统上JA8A上的5/7脚引出在使用模拟主轴时要注意以下问题梯形图*SSTP G29.6主轴停止信号即使不用该信号也要常置为1否则无输出(必须处理)主轴倍率系统提供的主轴倍率为0%~~254%在G30(一个字节)中处理(全0和全1时倍率为0)(必须处理)SIND G33.7决定主轴倍率由从CNC(为0)给出,还是由PMC(为1)给出通常情况下AUTO/MDI/DNC方式下由CNC给出JOG/HAND下由PMC给出这些都是梯形图中编辑处理的也可以不处理此信号完全由CNC给出主轴的速度在3741中设定此参数必须设定其值对应于10V同时也与F36#0—F37#3S12位代码一致例如3741中设定2000程序中为S1000此时1000/2000=5V/10V=2047.5/4095当速度不对时往往是主轴倍率不正确输出的电压存在漂移请查看参数说明书设置相关的参数(P99)主轴的正反转可以由变压器上的正反转输出端子决定,此时梯形图中要处理主轴的正反转输出信号,类似于串行主轴的G70.4/G70.5,也可以由一个线圈输出,此时输出电压极性由M03/M04决定,通过参数3706#7/#6设定模拟主轴不输出的几种可能1在PMC中主轴急停,主轴停止信号(*SSTP G29.6),主轴倍率,没有处理2参数中没有设置主轴选择参数主轴的速度没有设定3当1802#2CTS误设将没有模拟输出4系统存储容量是否影响?53708#0SAR模拟主轴没有此信号误设主轴无输出。
FANUC 0I MD刀库设定

FANUC 0I MD刀库设定
D300;00000000 0 100
K5 1:刀套定位信号取反,V6 V8 马克刀库设1。
其他刀库默认0
K10 0;1 关门启动程序有效
K0.4;1四轴有效。
D0 主轴刀号D1-——D24刀具表
C0 当前刀套号
大刀定义;D100=大刀数目,例如有2把大刀时D001 D003 D005 将是99,表示T1 T3和T5号刀不能使用,大刀装在T2和T4 上,自动
换刀时大刀可以和大刀互换,大刀换小刀时有可能会换两次刀,先将大刀放回大刀刀位,再去换小刀。
刀库乱刀时刀具表刷新:
1)在手轮模式下按下刀库正转键和程序暂停键或者程序启动键转动刀库到1号刀位。
(MDI方式下)
2)依次按SYSTEM***右扩展键****PMCMNT***计数器1 C0改为1。
3)依次按SYSTEM***右扩展键****PMCMNT***数据***操作***缩放***将D0--—D24按0-24排列.
另外当刀库卡刀时,可以按下SET***操作中的第8个RESET TOOL开关后,在手轮方式下同时按下刀库正转和Z—键,刀库将执行单步动作,直到整个换到动作结束,然后关掉开关8。
另一种方法是手动将刀库复位后如果还有2027报警,则将K1参数8位中是1的都改为0即可。
如果在换刀过程中频繁卡刀,将参数4075(主轴定位宽度)+20—30。
FANUC0I-MD伺服参数调整研究

FANUC Oi-MD 伺服参数的调整研究杨俊一汽解放公司无锡柴油机厂摘要本文详细地介绍了FANUC数控的伺服系统的基本参数的设定、伺服参数初始化设定,并给出了防止过冲的调整、防止累计进给(爬行)的调整、全闭环伺服参数调整、重力轴防落调整的具体方法和实例,并举例说明参考点的故障现象,解决方法,便于维修人员对数控系统设置。
关键词FANUC 0I-MD 伺服参数调整在系统连接并通电运行后,首先要进行伺服参数的调整,包括基本伺服参数的设定以及按机床的机械特性和加工要求进行的优化调整,如果是全闭环,要先按半闭环设定(参数1815#1,伺服参数画面的N/M,位置反馈脉冲数,参考计数器容量),调整正常后再设定全闭环参数,重新进行调整。
以下就这几个方面进行介绍。
1.基本参数设定(FSSB)·参数1023设定为1;2;3等。
对应光缆接口X,Y,Z等。
·参数1902的位1= 0,伺服FSSB参数自动设定。
·在FSSB设定画面,指定各放大器连接的被控轴的轴号(1,2,3等)。
在CUR下面会显示放大器的电流(如40A),如果没有或显示--,则检查伺服放大器是否有电或光缆是否正确连接。
·按[SETING]软键。
(若显示警告信息,请重新设定)。
显示如下:* 先按[AMP] (放大器),再按[OPRT],选择[SETTING]如果正常设定,会出现000报警,关机再开机。
·在轴设定画面上,指定关于轴的信息,如分离型检测器接口单元的连接器号。
·按[SETING]键(若显示警告信息,重复上述步骤)。
此时,应关闭电源,然后开机,如果没有出现5138报警,则设定完成。
显示如下:* 按[AXIS](轴)上述的M1,M2表示全闭环的接口所连接的插座对应的轴,比如:M1的JF101连接y轴位置反馈,则在上面的y行的M1处设定为1。
2.伺服参数初始化设定·首先把3111#0 SVS设定为1显现伺服设定和伺服调整画面。
FANUC 0I-MD机床调试及验收
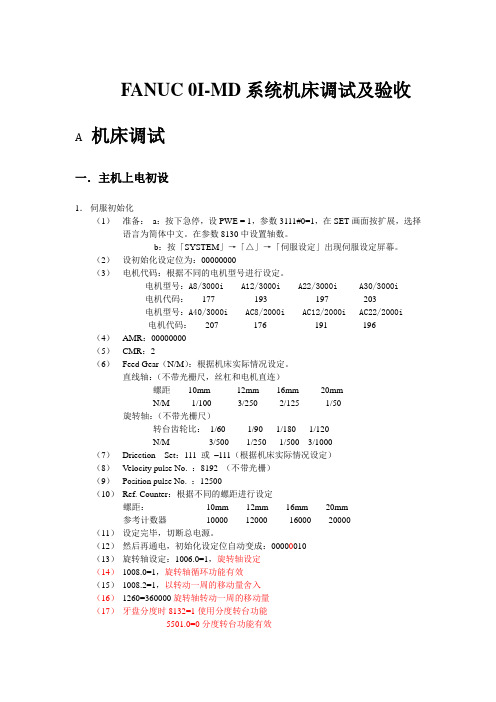
FANUC 0I-MD系统机床调试及验收A机床调试一.主机上电初设1.伺服初始化(1)准备:a:按下急停,设PWE = 1,参数3111#0=1,在SET画面按扩展,选择语言为简体中文。
在参数8130中设置轴数。
b:按「SYSTEM」→「△」→「伺服设定」出现伺服设定屏幕。
(2)设初始化设定位为:00000000(3)电机代码:根据不同的电机型号进行设定。
电机型号:A8/3000i A12/3000i A22/3000i A30/3000i电机代码:177 193 197 203电机型号:A40/3000i AC8/2000i AC12/2000i AC22/2000i电机代码:207 176 191 196 (4)AMR:00000000(5)CMR:2(6)Feed Gear(N/M):根据机床实际情况设定。
直线轴:(不带光栅尺,丝杠和电机直连)螺距10mm 12mm 16mm 20mmN/M 1/100 3/250 2/125 1/50旋转轴:(不带光栅尺)转台齿轮比:1/60 1/90 1/180 1/120N/M 3/500 1/250 1/500 3/1000(7)Driection Set:111 或–111(根据机床实际情况设定)(8)Velocity pulse No. :8192 (不带光栅)(9)Position pulse No. :12500(10)Ref. Counter:根据不同的螺距进行设定螺距:10mm 12mm 16mm 20mm参考计数器10000 12000 16000 20000 (11)设定完毕,切断总电源。
(12)然后再通电,初始化设定位自动变成:00000010(13)旋转轴设定:1006.0=1,旋转轴设定(14)1008.0=1,旋转轴循环功能有效(15)1008.2=1,以转动一周的移动量舍入(16)1260=360000旋转轴转动一周的移动量(17)牙盘分度时8132=1使用分度转台功能5501.0=0分度转台功能有效5512=1最小分度数2.FSSB 设定(1)参数No.1902 设为00000000(2)参数No.1020:X:88Y:89Z:90B:66参数No.1022:X:1Y:2Z:3B:0参数No.1023:X:1Y:2Z:3B:4(按照实际顺序设置)(3)按功能键「SYSTEM」,按数次扩展键「△」,直至出现「FSSB」.(4)按软键「AMP」,出现放大器设定画面,给连接到放大器的轴设定一个顺序号,按照连接放大器的顺序设定号码。
FANUC_0i_Mate-D数控系统机床常用参数

FANUC_0i_Mate-D数控系统机床常⽤参数FANUC 数控车床参数设置试验实践项⽬ 1、显⽰参数2、⽤MDI⽅式设定参数3、基本功能参数的设置任务报告1、请说明系统报警P/S000和P/S001的含义?P/S000 参数可写⼊P/S001 需要重新启动使参数⽣效2、如果机床在切削时使⽤恒定表⾯切削速度控制不起作⽤,应该⾸先检查哪个参数?检查参数8133(设定了此参数时,要切断⼀次电源)。
SYC SCS SSC SSC 是否使⽤恒定表⾯切削速度控制。
0:不使⽤1:使⽤3、⼿摇单元 PMC 系统参数的设置。
(连接说明书)4、软限位参数的设置。
(连接说明书)5、分析参数设置对数控系统的运⾏的作⽤于影响1)6、根据上⾯所讲的观察基本参数的设定值参数号参数含义参数值参数号参数含义参数值1020 轴名称1022 轴属性1023 轴顺序8130 CNC控制轴数1320 正软限位1321 负软限位1410 空运⾏速度1420 各轴快移速度1423 各轴⼿动速度1424 各轴⼿动快移速度1425 各轴回参速度1430 最⼤切削进给速度3003#0 互锁信号3003#2 各轴互锁信号3003#3 各轴⽅向互锁3004#5 超程信号3716 主轴电机种类3717 个主轴放⼤器号3720 位置编码器脉冲数3730 模拟输出增益3735 主轴电机最低钳制速度3736 主轴电机最⾼钳制速度3741/2/3 电机最⼤值/减速⽐3772 主轴上限转速8133#5 是否使⽤主轴串⾏输出4133 主轴电机代码。
FANUC Series 系统OI 0i-D参数说明书手册B-64310CM_01

注释 1 为了便于说明,有的情况下按照如下方式分类说明各机型。
T 系列:0i -TD / 0i Mate -TD M 系列:0i -MD / 0i Mate -MD 2 本说明书中描述的功能,根据不同的机型,有的不可使用。详情请参阅 规格说明书(B-64302CM)。 3 0i -D / 0i Mate -D 中,为了使部分基本功能有效或者无效,需要设定参 数。有关这些参数,请参照 4.51 节“与 0i -D / 0i Mate -D 基本相关的 参数”。
宏编译器/宏执行器编程说明书 MACRO COMPILER 操作说明书 C 语言执行器编程说明书
B-64303CM-2 B-64304CM -5 B-64303CM -3
PMC PMC 编程说明书 网络相关说明书
B-64393CM
PROFIBUS-DP 板操作说明书 FAST Ethernet/功能相关说明书
B-64404CM B-64414CM
MANUAL GUIDE i(车床系统/加工中心系统通用)操作 B-63874CM
说明书
MANUAL GUIDE i(加工中心系统)操作说明书
B-63874CM-2
MANUAL GUIDE i 设置指南 操作说明书
B-63874CM-1
MANUAL GUIDE 0i 操作说明书
警告 适用于:如果错误操作,则有可能导致操作者死亡或受重伤。
注意 适用于:如果错误操作,则有可能导致操作者受轻伤或者损坏设备。
注释 指出除警告和注意以外的补充说明。
※ 请仔细阅读本说明书,并加以妥善保管。
s-1
B-64310CM/01
前言
可以使用的机型名称
前言
本说明书就下列机型进行描述。 另外,正文中还使用下列简称。
Fanuc 0i 系统数控机床参数设置小经验三则
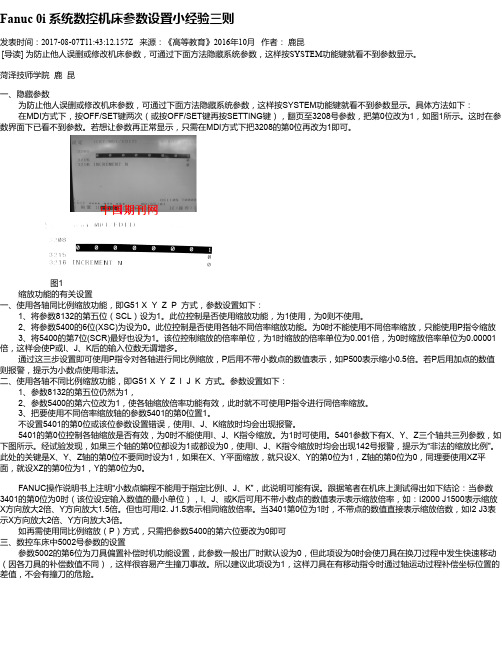
Fanuc 0i 系统数控机床参数设置小经验三则发表时间:2017-08-07T11:43:12.157Z 来源:《高等教育》2016年10月作者:鹿昆[导读] 为防止他人误删或修改机床参数,可通过下面方法隐藏系统参数,这样按SYSTEM功能键就看不到参数显示。
菏泽技师学院鹿昆一、隐藏参数为防止他人误删或修改机床参数,可通过下面方法隐藏系统参数,这样按SYSTEM功能键就看不到参数显示。
具体方法如下:在MDI方式下,按OFF/SET键两次(或按OFF/SET键再按SETTING键),翻页至3208号参数,把第0位改为1,如图1所示。
这时在参数界面下已看不到参数。
若想让参数再正常显示,只需在MDI方式下把3208的第0位再改为1即可。
图1缩放功能的有关设置一、使用各轴同比例缩放功能,即G51 X Y Z P 方式,参数设置如下:1、将参数8132的第五位(SCL)设为1。
此位控制是否使用缩放功能,为1使用,为0则不使用。
2、将参数5400的6位(XSC)为设为0。
此位控制是否使用各轴不同倍率缩放功能。
为0时不能使用不同倍率缩放,只能使用P指令缩放3、将5400的第7位(SCR)最好也设为1。
该位控制缩放的倍率单位,为1时缩放的倍率单位为0.001倍,为0时缩放倍率单位为0.00001倍,这样会使P或I、J、K后的输入位数无谓增多。
通过这三步设置即可使用P指令对各轴进行同比例缩放,P后用不带小数点的数值表示,如P500表示缩小0.5倍。
若P后用加点的数值则报警,提示为小数点使用非法。
二、使用各轴不同比例缩放功能,即G51 X Y Z I J K 方式。
参数设置如下:1、参数8132的第五位仍然为1,2、参数5400的第六位改为1,使各轴缩放倍率功能有效,此时就不可使用P指令进行同倍率缩放。
3、把要使用不同倍率缩放轴的参数5401的第0位置1。
不设置5401的第0位或该位参数设置错误,使用I、J、K缩放时均会出现报警。
发那科FANUC 冲床系统0i-PD参数说明书中文版B-64560CM_01
注意 适用于:如果错误操作,则有可能导致操作者受轻伤或者损坏设备。
注释 指出除警告和注意以外的补充说明。
※ 请仔细阅读本说明书,并加以妥善保管。
s-1
B-64560CM/01
前言
前言
可以使用的机型名称
本说明书就使用于如下机型的参数进行说明。 另外,正文中还使用下列简称。
FANUC Series 0+-PD
参 数参说数説明明书書
B-64560CM/01
· 本说明书的任何内容不得以任何方式复制。 · 本机的外观和规格会随着改进而有所变更。
本说明书中所载的商品,属于基于《外汇及对外贸易法》的管制对象。出口上述商品时 需要得到日本国政府的许可。此外,某些商品还受到美国政府的再出口管制。出口本商 品时请向我公司洽询。
本说明书中记载了我公司以外的程序名称和装置名称,这些都包括在各制造商的注册商 标中。 但在某些情况下,正文中没有用®和™标记注明。
B-64560CM/01
警告、注意和注释
警告、注意和注释
为保证操作者人身安全,预防机床损坏,本说明书中根据有关安全的注意事项的重要程度,在正文中以“警告”和“注 意”来描述。 有关的补充说明以“注释”来描述。 用户在使用之前,必须熟读这些“警告”、“注意”和“注释”中所叙述的事项。
参数的说明
可根据数据类型,对参数进行如下分类。 数据类型
位型
位机械组型
位路径型
位轴型
字节型 字节机械组型 字节路径型 字节轴型 字型 字机械组型 字路径型 字轴型 2 字型 2 字机械组型 2 字路径型 2 字轴型 实数型 实数机械组型 实数路径型 实数轴型
FANUC 0 itd系统的指令详解

FANUC 0-TD系统G 代码命令代码组及其含义“模态代码” 和“一般” 代码“形式代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同组代码替换。
G代码组别解释G00 01 定位(快速移动)G01 直线切削G02 顺时针切圆弧(CW,顺时钟)G03 逆时针切圆弧(CCW,逆时钟)G04 00 暂停(Dwell)G09 停于精确的位置G20 06 英制输入G21 公制输入G22 04 内部行程限位有效G23 内部行程限位无效G27 00 检查参考点返回G28 参考点返回G29 从参考点返回G30 回到第二参考点G32 01 切螺纹G40 07 取消刀尖半径偏置G41 刀尖半径偏置(左侧)G42 刀尖半径偏置(右侧)G50 00 修改工件坐标;设置主轴最大的RPMG52 设置局部坐标系G53 选择机床坐标系G70 00 精加工循环G71 内外径粗切循环G72 台阶粗切循环G73 成形重复循环G74 Z 向步进钻削G75 X 向切槽G76 切螺纹循环G80 10 取消固定循环G83 钻孔循环G84 攻丝循环G85 正面镗孔循环G87 侧面钻孔循环G88 侧面攻丝循环G89 侧面镗孔循环G90 01 (内外直径)切削循环G92 切螺纹循环G94 (台阶) 切削循环G96 12 恒线速度控制G97 恒线速度控制取消G98 05 每分钟进给率G99 每转进给率代码解释G00 定位1. 格式G00 X_ Z_ 这个命令把刀具从当前位置移动到命令指定的位置(在绝对坐标方式下),或者移动到某个距离处(在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
FANUC_0i系统参数的设定方法

FANUC_0i系统参数的设定方法FANUC_0i系统参数是机床控制系统中的一种重要参数,它们决定了机床的运行模式、功能和性能。
正确设置FANUC_0i系统参数对于机床的正常运行和高效生产非常重要。
下面将介绍FANUC_0i系统参数的设定方法。
其次,设定FANUC_0i系统参数需要进入系统参数设定模式。
可以通过以下步骤进入系统参数设定模式:1.打开机床电源,进入FANUC_0i系统界面。
2.在FANUC_0i系统界面上按下“SYSTEM”按钮,进入系统菜单。
3.在系统菜单中选择“PARAMETER”选项,进入参数菜单。
4.在参数菜单中选择“SYSTEM”选项,进入系统参数菜单。
5.在系统参数菜单中选择“EDIT”选项,进入系统参数设定模式。
进入系统参数设定模式后,可以根据实际需要对FANUC_0i系统参数进行设定。
下面是一些常见的FANUC_0i系统参数的设定方法:1.机床坐标系参数:机床坐标系参数用于定义机床的坐标系原点和坐标轴方向。
可以根据实际情况设定机床坐标系参数,通常需要根据机床的结构和操作习惯进行调整。
2.运动参数运动参数:运动参数用于定义机床的运动速度和加减速度。
可以根据加工工件的要求和机床的性能设定运动参数,以确保机床的运动平稳和加工质量。
3.工具补偿参数:工具补偿参数用于定义刀具的几何和补偿信息。
可以根据使用的刀具和加工工件的要求设定工具补偿参数,以确保刀具的补偿精度和加工质量。
4.编程参数:编程参数用于定义机床的编程方式和规范。
可以根据编程人员的习惯和加工工件的要求设定编程参数,以确保编程的准确性和可读性。
在设定FANUC_0i系统参数时,需要注意以下几点:1.确保设定参数的合理性,避免设定错误导致机床故障或加工质量下降。
2.保存设定参数的备份,以备后续需要恢复时使用。
3.定期检查和更新设定参数,以适应机床的运行状态和加工工艺的变化。
总之,正确设定FANUC_0i系统参数对于机床的正常运行和高效生产至关重要。
项目四 FANUC 0i-D数控系统参数设定初步

■FANUC 0i-D数控系统具有丰富的机床参数;
■数控系统参数是数控系统用来匹配数控机床及其功能的 一系列数据; ■数控系统连接完成后,要对其进行系统参数的设定和调整, 才能保证数控机床正常运行和达到机床加工精度;
■参数设置在数控机床调试与维修中起着重要作用。
69
70
1.按照数控系统参数控制功能分(8)
序号 71 72 73 74 75 76 77 78 79 80 参数类型 与刀具偏置相关参数(其2) 与刚性攻丝相关参数(其2) 与程序相关参数(其2) 与基于PMC轴控制相关参数(其2) 与PMC相关参数 与防止错误操作相关参数 与手轮相关参数 与同步控制、混合控制和重叠控制(T系列)相关参数 (其2) 与基于PMC轴控制相关参数(其3) 与显示和编辑相关参数(其5) 参数号 11400 11420~11480 11630 11850 11931 12255~12256 12300~12351 12600 12730~12738 13101~13141
这样参数处于可写状态,同时CNC发生P/S 报警100。
1.进入参数改写状态(5)
解除参数写保护操作时,注意以下几点:
◆如果发生100号报警,即变为报警画面;
◆把参数3111#7(NPA)设置成1,便可使发生报警时
也不会切换成报警画面(通常情况下,发生报警时必
须让操作者知道,上述参数通常应设成0);
●输入参数值后,使用软键[+输入],则是把输入值加到原
来值上; ●输入参数值后,使用软键[输入],则是输入新的参数值。 ●输入参数后,也可以用MDI键盘上
INPUT 键完成写参数操作。
2.参数常规设定方式(3)
FANUC 0i(-mate)-D数控车床功能调试
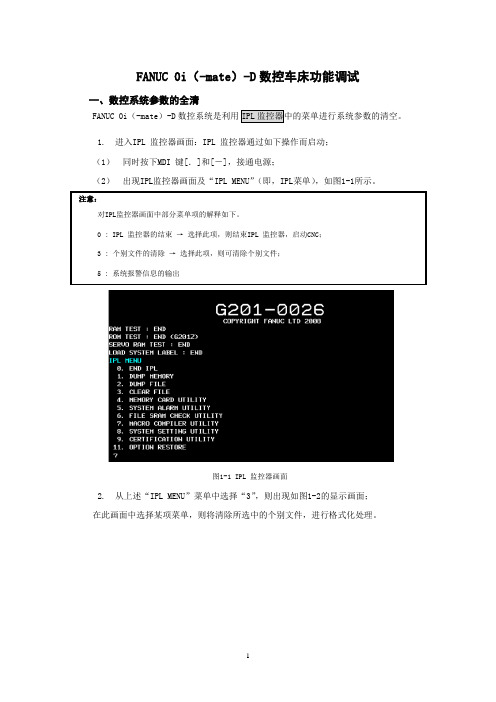
FANUC 0i(-mate)-D数控车床功能调试一、数控系统参数的全清FANUC 0i(-mate)-D数控系统是利用1.进入IPL 监控器画面:IPL 监控器通过如下操作而启动;(1)同时按下MDI 键[.]和[-],接通电源;(2)出现IPL监控器画面及“IPL MENU”(即,IPL菜单),如图1-1所示。
图1-1 IPL 监控器画面2.从上述“IPL MENU”菜单中选择“3”,则出现如图1-2的显示画面;在此画面中选择某项菜单,则将清除所选中的个别文件,进行格式化处理。
图1-2 个别文件的清除画面3. 在图1-2所示的菜单中选择要操作的项。
如要清空系统参数,则用MDI 键盘键“1”→按键;4. 则显示器上会出现“CLEAR FILE OK ? (NO=0,YES=1)”的提问;5. 如果想清空参数则键入“1”时;如果不想清空参数,则键入“0”表示中止操作。
6. 若要继续清除其它文件时,重复第3~5步骤的操作;7. 若想结束操作并返回上一级菜单画面(图1-1)时,请键入“0”。
也可以直接下电再重新上电,以便于检查系统参数是否全清。
二、数控系统参数设置数控系统正常运行的重要条件是必须保证各种参数的正确设定,不正确的参数设置与更改,可能造成严重的后果。
因此,必须理解参数的功能,熟悉设定值,详细内容参考《参数说明书》。
1. 显示参数的操作(1)按MDI 面板上的【SYSTEM 】功能键数次或者按【SYSTEM 】功能键一次,再按〖参数〗软键,选择参数画面,见图2-1。
图2-1 参数画面(2)参数画面由多页组成,可用光标移动键或翻页键,寻找相应的参数画面,也可由键盘输入要显示的参数号,然后按下〖号搜索〗软健,显示指定参数所在的页面,此时光标位于指定参数的位置。
2.用MDI设定参数(1)在操作面板上选择MDI方式或急停状态。
(2)按下【OFS/SET】功能键,再按〖设定〗软键,可显示“设定”画面的第一页。
FANUC系统加工中心编程详解

FANUC-Oi-MD系统数控编程常用编程指令一:准备功能G功能准备功能G代码用来规定刀具和工件的相对运动轨迹、机床坐标系、坐标平面、刀具补偿、坐标偏置等多种加工操作;数控加工常用的G功能代码见表4-1.表4-1二:辅助功能M代码辅助功能代码用于指令数控机床辅助装置的接同和关断,如主轴转/停、切削液开/关,卡盘夹紧/松开、刀具更换等动作;常用M代码见表如下:一、有关坐标和坐标系的指令1、工件坐标系设定G92格式:G92 X_ Y_ Z_Z YWXX XY X 5454Y 机机9292Y G G 92543040AX Y 59593030G 59B 45152035G 523535C DXY机床原点M Z 2X2工件原点M 机床原点X1Z 1Y2Y1 X 、Y 、Z 、为当前刀位点在工件坐标系中的坐标;1、G92指令通过设定刀具起点相对于要建立的工件坐标原点的位置建立坐标系;2、此坐标系一旦建立起来,后序的绝对值指令坐标位置都是此工件坐标系中的坐标值; 例:G92 X20 Y10 Z10其确立的加工原点在距离刀具起始点X=-20,Y=-10,Z=-10的位置上,如图a 所示; 2、绝对值编程G90与增量值编程G91 格式: G90 G00/G01 X — Y — Z — G91 G00/G01 X — Y — Z —注意:铣床编程中增量编程不能用U 、W,如果用,就表示为U 轴、W 轴. 例:刀具由原点按顺序向1、2、3点移动时用G90、G91指令编程;注意:铣床中X 轴不再是直径. 3、工件坐标系选择 G54-G59 说明:1、G54~G59是系统预置的六个坐标系,可根据需要选用;2、该指令执行后,所有坐标值指定的坐标尺寸都是选定的工件加工坐标系中的位置;1~6号工件加工坐标系是通过CRT/MDI 方式设置的;3、G54~G59预置建立的工件坐标原点在机床坐标系中的坐标值可用MDI 方式输入,系统自动记忆;4、使用该组指令前,必须先回参考点;5、G54~G59为模态指令,可相互注销; 选择机床坐标系:4、G53 --选择机床坐标系编程格式:G53 G90 X ~ Y ~ Z ~ ;➢ G53 指令使刀具快速定位到机床坐标系中的指定位置上,式中X 、Y 、Z 后的值为机床坐标系中的坐标值;➢ 例:G53 X-100 Y-100 Z-20➢ G53为非模态指令,只在当前程序段有效. 5、G52 –局部坐标系设定编程格式:G52 X ~ Y ~ Z ~ ;式中X 、Y 、Z 后的值为局部原点相对工件原点的坐标值;几个坐标系指令应用举例 如图所示从A-B-C-D行走路线编程如下N01 G54 G00 G90 快速移到G54中的A点N02 G59 将G59置为当前工件坐标系N03 G00 移到G59中的B点N04 G52 在当前工件坐标系G59中建立局部坐标系G52N05 G00 G90 移到G52中的C点N06 G53 移到G53机械坐标系中的D点……二、坐标平面选定坐标平面选择 G17,G18,G19G17 XY平面刀具长度补偿值为Z平面G18 XZ平面刀具长度补偿值为Y平面G19 YZ平面刀具长度补偿值为X平面1、坐标平面选择指令是用来选择圆弧插补的平面和刀具补偿平面的;2、G17、G18、G19为模态功能,可相互注销,G17为缺省值;直线插补编程1、快速定位指令G00格式:G00 X_Y_Z_其中,X、Y、Z、为快速定位终点,在G90时为终点在工件坐标系中的坐标;在G91时为终点相对于起点的位移量;空间折线移动说明:1、G00 一般用于加工前快速定位或加工后快速退刀;2、为避免干涉,通常的做法是:不轻易三轴联动;一般先移动一个轴,再在其它两轴构成的面内联动;如:进刀时,先在安全高度Z上,移动联动X、Y轴,再下移Z轴到工件附近;退刀时,先抬Z 轴,再移动X-Y轴;2、直线进给指令G01格式: G01 X _Y_ Z_ F_其中,X、Y、Z为终点坐标,F为进给速度,在G90时为终点在工件坐标系中的坐标;在G91时为终点相对于起点的位移量;说明:1 G01指令刀具从当前位置以联动的方式,按程序段中F指令规定的合成进给速度,按合成的直线轨迹移动到程序段所指定的终点;2实际进给速度等于指令速度F与进给速度修调倍率的乘积;3G01和F都是模态代码,如果后续的程序段不改变加工的线型和进给速度,可以不再书写这些代码;4G01可由G00、G02、G03或G33功能注销;3、例子O1234:G17 G90; 初始化G54 G00 X0 Y0; 设定工件坐标系M03 S1000; 主轴正转G00 Z100.; 刀具下刀Z5.; 下刀R点G01 Z-5. F100; 下刀切削深度G01 X5. Y10.; 原点→A点G01 X5. Y35.; A点→B点G01 X35. Y35.; B点→C点G01 X35. Y10.; C点→D点G01 X5. Y10.; D点→A点G00 X0 Y0; 快速回到原点G00 Z100.; 快速抬刀M05; 主轴停止M30; 程序结束圆弧插补编程圆弧进给指令 G02 :顺时针圆弧插补G03 :逆时针圆弧插补指令格式:G17 G02 G03 G90 G91 X_Y_I_ J_ F_或G17 G02 G03 G90 G91 X_Y_ R_ F_G18 G02 G03 G90 G91 X_Z_I_ K_ F_或G18 G02 G03 G90 G91 X_Z_ R_ F_G19 G02 G03 G90 G91 Y_Z_J_ K_ F_或G19 G02 G03 G90 G91 Y_Z_ R_ F_一、注明:1、I指圆弧起点指向圆心的连线在X轴上的投影矢量与X轴方向一致为正,相反为负;2、J指圆弧起点指向圆心的连线在Y轴上的投影矢量与Y轴方向一致为正,相反为负;3、K指圆弧起点指向圆心的连线在Z轴上的投影矢量与Z轴方向一致为正,相反为负;4、整圆不能用R编程,只能用I、J、K:a≤1800 R取正值;a>1800 R取负值O ZXG03G02O YZG03G02O XYG03 G02XZ Y二、指令参数说明:1、圆弧插补只能在某平面内进行;2、G17代码进行XY 平面的指定,省略时就被默认为是G173、当在ZXG18和YZG19平面上编程时,平面指定代码不能省略 三G02/G03判断:G02为顺时针方向圆弧插补,G03为逆时针方向圆弧插补;顺时针或逆时针是从垂直于圆弧加工平面的第三轴的正方向看到的回转方向;平面圆弧插补四编制圆弧程序段例1: 1、大圆弧AB每段圆弧可有四个程序段表示 G17 G90 G03 X0 Y25 R-25 F80 G17 G90 G03 X0 Y25 I0 J25 F80 G17 G91 G03 X-25 Y25 R-25 F80 G17 G91 G03 X-25 Y25 I0 J25 F80 2、小圆弧ABG17 G90 G03 X0 Y25 R25 F80 G17 G90 G03 X0 Y25 I-25 J0 F80 G17 G91 G03 X-25 Y25 R25 F80 G17 G91 G03 X-25 Y25 I-25 J0 F80例2:整圆编程 要求由A 点开始,实现逆时针圆弧插补并返回A 点; G90 G03 X30 Y0 I-40 J0 F80G91 G03 X0 Y0 I-40 J0 F80例3:O1234:G17 G90; 初始化G54 G00 X-30. Y-50.;设定工件坐标系M03 S1000; 主轴正转G00 Z100.; 刀具下刀Z5.; 下刀R点G01 Z-5. F100; 下刀切削深度G01 X-30. Y0.; 下刀点→A点G02 X30. Y0. R30.; A点→C点G01 X30. Y-15.; C点→D点G03 X15. Y-30. R15;D点→E点G01 X-20. Y-30.; E点→G点G02 X-30. Y-20. R10.;G点→H点G03 X-42. Y-20. R6.; 圆弧切出G01 X-45.;G00 Z100.; 快速抬刀G00 X0 Y0; 快速回到原点M05; 主轴停止M30; 程序结束刀具半径补偿功能编程G41:刀具半径补偿左偏置 G42:刀具半径补偿右偏置G40:取消刀具半径补偿格式:G41/G42 G01/G00 X Y D ;G40 G01/G00 X Y ;G41:左刀补在刀具前进方向左侧补偿,如图 a;G42:右刀补在刀具前进方向右侧补偿,如图 b;X, Y, Z:G00/G01的参数,即刀补建立或取消的终点注:投影到补偿平面上的刀具轨迹受到补偿;D:G41/G42的参数,即刀补号码,它代表了刀补表中对应的半径补偿值;G40、G41、G42都是模态代码,可相互注销;注意:(1)刀具半径补偿平面的切换必须在补偿取消方式下进行(2)刀具半径补偿的建立与取消只能用G00或G01指令,不得是G02或G03刀具长度补偿功能编程格式:G43/G44 G01/G00 Z H ;G49 G01/G00 Z ;G43:刀具长度正补偿G44:刀具长度负补偿G49:取消刀具长度补偿Z:G00/G01的参数,即刀补建立或取消的终点H:刀具长度偏置号例子:O1234;G17 G40 G49 G80 G90;G54 G00 X0 Y0;M03 S1000;G00 X-65. Y-60.;G43 G00 ;Z5.;G01 Z-10. F100;G01 X-65. Y30.;G02 X-55. Y40. R10.;G01 X45. Y40.;G01 Y-20.;G02 X-55. Y-40.;G02 X-65. Y-30. R10.;G03 X-77. Y-30. R6.;G01 X-80.;G40 G00 X-85.;G49 G00 Z100.;X0 Y0;M05;M30;子程序编程M98、M99把一个程序中按某一固定顺序重复出现的内容抽出并按一定格式编写,则称为子程序,子程序由主程序或子程序调用指令调出执行,调用子程序的格式如下:M98Pxxxx Lxxxx子程序号调用次数1-9999如果省略了重复次数,则认为重复次数为一次;从子程序返回到主程序用M99;在子程序调用子程序与在主序中调用子程序的情况一样,一般把刀具半径补偿功能放在子程序中使用,用MDI输入M98Pxxxx时,不能调用子程序;例:如下图所示,在一块平板上加工6个边长为10mm的等边三角形,每边的槽深为-2mm,工件上表面为z向零点;其程序的编制就可以用调用子程序的方式来实现编程时不考虑刀具半径补偿;O0001主程序G54 G90 G01 Z40 F200进入工件加工坐标系M03 S1000主轴启动G00 Z3快进到工件表面上方G01 X0 移动到1号三角形顶点M98 P0002调用子程序切削三角形90G移动到2号三角形顶点M98 P20 调用子程序切削三角形G90 G01 X60 移动到3号三角形上顶点M98 P20 调用子程序切削三角形G90 G01 X0 移动到4号三角形顶点M98 P20 调用子程序切削三角形G90 G01 X30 移动到5号三角形顶点M98 P20调用子程序切削三角形G90 G01 X60 移动到6号三角形顶点M98 P20调用子程序切削三角形G00 Z30抬刀M05主轴停止M30程序结束O0002G91 G01 Z-2 F100G01 X-5G01 X10 Y0G01 X5G00 Z20M99固定循环编程G80~G891.取消固定循环指令G80格式:G80功能:用G80取消固定循环方式,机床回到执行正常操作状态;孔的加工数据,包括R点,Z 点等等,都被取消:但是移动速度命令会继续有效;2. 定点钻孔循环G81格式:G81 X_ Y_ Z_ R_ F_ L_X__Y__为孔位数据Z__ 孔底深度R__加工初始位置F__切削进给速度L__重复次数功能:G81命令可用以一般孔的加工;加工过程:1XY平面孔定位2快速下至R基准面3Z轴向下钻孔4快速返回起始点G98时或R基准面G99时5若有L字段,则循环1~4做完L个孔3.钻孔循环指令G82格式:G82 X_ Y_ R_ Z_ P_ F_ J_X_ Y_ 为孔位数据Z_ 孔底深度R_ 加工初始位置P_ 在孔底的暂停时间F_ 切削进给速度K_ 重复次数功能:用于孔底暂停钻孔循环加工过程:1XY平面孔定位2快速下至R基准面3Z轴向下钻孔,在孔底暂停P给定的时间4快速返回起始点G98时或R基准面G99时5若有L字段,则循环1~4做完L个孔3.排屑钻孔循环G83G83 X_ Y_ Z_ R_ Q_ F_ K_X_ Y_ 为孔位数据Z_ 孔底深度R_ 加工初始位置Q_ 每次切削进给的切削深度P_ 在孔底的暂停时间F_ 切削进给速度K_ 重复次数功能:深孔钻啄钻循环攻丝循环G841. 格式G84 X_Y_Z_R_P_F_K_;X_ Y:孔位数据Z_:孔底深度绝对坐标R_:每次下刀点或抬刀点绝对坐标P_:暂停时间F_:切削进给速度K_:重复次数功能:G84 进给孔底主轴反转快速退刀;加工过程:主轴顺时针旋转执行攻丝,当到达孔底时,为了回退,主轴以相反方向旋转,这个过程生成螺纹;在攻丝期间进给倍率被忽略,进给暂停不停止机床,直到返回动作完成;在指定G84之前,用辅助功能使主轴旋转;当G84指令和M代码在同一个程序段中指定时,在执行第一个定位动作的同时,执行到R 点的同时加偏置;镗孔循环G851. 格式G85 X_Y_Z_R_F_K_;X_ Y:孔位数据Z_:孔底深度绝对坐标R_:每次下刀点或抬刀点绝对坐标F_:切削进给速度K_:重复次数功能:G85 中间进给孔底快速退刀;镗孔循环G861. 格式G86 X_Y_Z_R_F_L_;X_ Y:孔位数据Z_:孔底深度绝对坐标R_:每次下刀点或抬刀点绝对坐标F_:切削进给速度K_:重复次数功能:G86 进给孔底主轴停止快速退刀; 例:N005 G80 G90 G0 X0 Y0 M06 T1;换 20镗刀N010 G55 ;调用G55工件坐标系N020 M03 S1000N030 G43 H1 Z50 ;调用长度补偿N040 G86 Z-30 R1 F200 ;镗孔循环N050 G80 G0 Z50 ;取消固定循环N060 M05N070 M30反镗孔循环G871. 格式G87 X_Y_Z_R_Q_P_F_K_;X_ Y:孔位数据Z_:孔底深度绝对坐标R_:每次下刀点或抬刀点绝对坐标Q_:刀具偏移量P_:暂停时间F_:切削进给速度K_:重复次数功能:87 进给孔底主轴正转快速退刀; 例:N005 G80 G90 G0 X0 Y0 M06 T1 ;换 20镗刀N010 G55 ;调用G55工件坐标系N020 M03 S1000N030 G43 H1 Z50;调用长度补偿N040 G87 Z-30 R1 Q2 P2000 F200 ;反镗孔循环N050 G80 G0 Z50 ;取消固定循环N060 M05N070 M30镗孔循环G881. 格式G88 X_Y_Z_R_P_F_K_;X_ Y:孔位数据Z_:孔底深度绝对坐标R_:每次下刀点或抬刀点绝对坐标P_:孔底的暂停时间F_:切削进给速度K_:重复次数说明:沿着X和Y轴定位以后,快速移动到R点,然后,从R点到Z点执行镗孔,当镗孔完成后,执行暂停,然后主轴停止;刀具从孔底手动返回到R点,在R点,主轴正转,并且执行快速移动到初始位置;在指定G88之前,用辅助功能旋转主轴;当G88指令和M代码在同一程序段中指定时,在第一个定位动作的同时执行M代码,然后,系统处理下一个镗孔动作;当指定重复次数K时,只对第一个孔执行M代码,对第二或以后的孔,不执行M代码;对第二或以后的孔,不执行M代码;当在固定循环中指定刀具长度偏置G43/G44或G49时,在定位到R点的同时加偏置;限制轴切换必须在切换镗孔轴之前取消固定循环P 在执行镗孔加工的程序段中指定P,如果在不执行镗孔加工的程序段中指定,P不能作为模态数据被贮存;取消不能在同一程序段中指定01和G代码和G88,否则G88将被取消;刀具偏置在固定循环方式中,刀具偏置被忽略;镗孔循环G891. 格式G89 X_Y_Z_R_P_F_L_;X_ Y:孔位数据Z_:孔底深度绝对坐标R_:每次下刀点或抬刀点绝对坐标P_:孔底的停刀时间F_:切削进给速度K_:重复次数功能:G89 进给孔底暂停快速退刀;G99返回点平面当刀具到达孔底后,刀具可以返回到R点平面或初始位置平面,由G98和G99指定,一般情况下,G99用于第一次钻孔面G98用于最后钻孔,即使在G99方式中执行钻孔,初始位置品平面也不变;能编程图形镜像指令、格式: X__ Y__ Z__ 激活镜像功能M98 P____X__ Y__ Z__ 取消镜像功能例:用镜像功能编程如下图所示程序O0001子程序,1的加工程序增量坐标G41 G00 X10 Y4 D01Y 1G01 Z-2 F100Y25X10G03 X10 Y-10 I10G01 Y-10X-25G00 Z100G40 X-5 Y-10M99O0002主程序G91G17M03M98P0001 加工1Y轴镜像,镜像位置为X0M98P0001 加工2G50 X0 取消Y轴镜像原点镜像,镜像位置为0,0M98P0001 加工3X0 Y0 取消Y轴镜像Y0 X轴镜像,镜像位置为Y0M98 P0001 加工4Y0 取消X轴镜像M05M30旋转功能编程图形旋转指令G68、G69指令格式:G68 X__ Y__ R___ 激活旋转功能 M98 P____G69 取消激活功能以给定点x、y为旋转中心,将图形旋转R角度;如省略X、Y则以原点为旋转中心;例如:G68 R60表示以坐标原点为旋转中心,将图形旋转60度;G68 X15 Y15 R60表示以坐标15,15为旋转中心将图形旋转60度;例:如下图所示,编程如下O0001子程序G91 G17G01 X20 Y0 F250G03 X20 Y0 R5G02 X-10 Y0 R5G02 X-10 Y0 R5G00 X-20 Y0M99O0002主程序G90 G00 X0 Y0M98 P0001G68 R45M98 P0001…………旋转八次G68 R315M98 P0001G69M30缩放功能编程图形缩放指令G51、G50指令格式:G51X__Y__Z__P__ 激活缩放功能M98 P____G50 取消缩放功能以给定点X、Y、Z为缩放中心,将图形放大都原始图形的p倍;如省略x、y、z,则以程序原点为缩放中心;例如:G51 P2表示以程序原点为缩放中心,将图形放大一倍;G51 X15.Y15. P2表示以给定点15,15为缩放中心,将图形放大一倍; 如下图所示,编程如下:O1000子程序G00 G90 X0 Y-10 F100G02 X0 Y10 I10 J10G01 X15 Y0G01 X0 Y-10M99O2000主程序G92 X-50 Y-40G51 P2M98 P1000G50M30。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FANUC 0i-D系统参数设定的基本方法
任务内容
FANUC 0i-D/0i Mate-D数控系统参数的类型
典型参数的表达方式
参数的显示与搜索
用MDI方式设定参数
数控系统上电全清
FANUC 0i-D数控系统具有丰富的机床参数。
数控系统参数是数控系统用来匹配数控机床及其功能的一系列数据,数控系统硬件连接完成后,要对其进行系统参数的设定和调整才能保证数控机床正常运行,达到机床加工功能要求和精度要求;同时,参数设置在数控机床调试与维修中起着重要的作用。
一、FANUC 0i-D/0i Mate-D数控系统参数的类型
1、按照数控系统参数的控制功能分
根据数控系统各参数的控制功能,FANUC 0i-D/0i Mate-D数控系统参数类型及其功能见表1:
表1 FANUC 0i-D/0i Mate-D数控系统参数控制功能类型。