第五章 频率响应
第5章频率响应法

第 5 章频率响应法频率响应法是控制理论的重要组成部分,是分析和综合控制系统的一种工程实用方法。
它不仅适用于单变量系统,而且也可以推广至多变量系统。
它的特点是:不必求解系统的高阶微分方程,可直接根据频率特性曲线的形状及其特征量来研究系统的性能。
其突出的优点是:物理意义明确,可用实验的方法求出系统的频率特性和传递函数;而且计算量小,方法形象和直观,因而广为工程界所采用。
根据它在系统分析和综合中的应用,将频率响应法分为两部分:频率响应分析法和频率响应综合法,并分别在第 5 章和第6 章讨论。
在这一章里主要介绍:频率响应法的基本概念和控制系统频率特性曲线的绘制方法,以及它在系统分析与综合中的应用,重点在于其基本概念和应用。
5.1 频率特性频率响应法起源于通讯学科。
它的基本思想是:将控制系统的变量也看作是信号;这些信号通过傅里叶(Fourier) 分析,对于周期信号可展开为傅氏级数,对于非周期信号可进行傅氏变换,它们均可视为由不同频率成分的正弦信号所合成的;线性定常系统各个变量的运动,就是系统对各个不同频率信号响应叠加的结果。
频率响应法的优点:第一,这种方法具有鲜明的物理意义。
第二,可以用实验方法测出系统的频率特性,并获得其传递函数以及其它形式的数学模型。
第三,它是一种图解法,形象直观、计算量小。
频率响应法也存在一定的局限性:首先它只适用于线性定常系统。
其次,频率响应法的筒便和实用性是以它的工程近似性为代价的。
5.1.1 频率特性的基本概念首先考察图 5.1 一阶RC 电路图图 5.1 所示的简单系统。
该系统为一阶RC 电路。
该电路的微分方程为:(5.1)系统的传递函数为:(5.2)图 5.1 一阶 RC 电路图若外施正弦输入电压,则可得系统的输出响应为:式中等号右边的第一项为输出响应的暂态分量,第二项为输出响应的稳态分量。
当t趋于无穷大时第一项的暂态分量将趋于零,故系统的稳态输出响应为:可以看到:在正弦输入电压作用下系统的稳态输出,是与输入同频率的正弦电压,其幅值为输入幅值的倍,相角比输入的迟后arctgωT。
第五章频率响应法
L( ) dB
对数频率特性曲线: 横坐标为角频率ω,采用 lg ω 分度,十倍频程的长度相等 对数分度优点:扩大频带。但坐标原点处ω不能为0
40 20 0 -20 -40
( )
0.01
0.1
1
10
100
dec
90o 45o 0 -45o -90o
0.01
0.1
1
10
100
伯德图优点: 展宽频带 化幅值乘除为加减、 易作近似幅频特性曲线图。
A 1 T
2 2
Sin(t arctgT )
根据定义 A( ) 1 / 1 2T 2 , ( ) arctgT
频率特性写成一个式子 e 2 2 1 T
1
jarctgT
1 1 1 jT 1 Ts s j
•三、频率特性的表示?
G(jω) = G(s) s=jω= A(ω) e jφ (ω) = P(ω) +j Q(ω)
补充2
ω<<1/T, L(ω)≈20lg1=0 90 ω>>1/T, L(ω)≈20lgωT 0 0.1 =20(lgω-lg1/T) -90 ( ) arctgT 极坐标图
转折频率
1
10 ω
1 T
图5.9 1+jT和1/(1+j T)的对数坐标图
当 ω 由零至无穷大变化时,惯性环节的极坐标图 是正实轴下方的半个圆周,证明如下: 1 1 T G( j ) j 2 2 jT 1 1 T 1 T 2 2 1 T ReG ( j ) u ( ) ImG ( j ) v( ) 2 2 2 2 1 T 1 T
第5章 频率响应
3. 高频电压放大倍数:定性分析
. Is 0 . UC . U s'
R U' s
b' . Au e RL . Uo
' 滞后 U ', U Cπ s ' 0, 当 f 时, U Cπ ' 滞后 U ' ( 90 )。 U Cπ s
' U U r R s U b e ' b e ' i i , R r ∥ r R ∥ R ) b e '( b b b s U R R s U sU i s i r be
共基截 止频率 共射截 止频率 特征 频率 集电结电容
0 f 1 j f
1 使 时的频率为 fT f 、 f 、 f 、 C ( C ) 。 T ob fT f 0 f 1 f 2 π r (C C b' e π μ)
手册 查得 通过以上分析得出的结论: ① 低频段和高频段放大倍数的表达式; ② 截止频率与时间常数的关系; ③ 波特图及其折线画法; ④ Cπ的求法。
1 电路高频段的放大倍数需乘因子 1 j f f H
② 当 f=fL时放大倍数幅值约降到0.707倍,相角超前45º ; 当 f=fH时放大倍数幅值也约降到0.707倍,相角滞后45º 。
③ 截止频率决定于电容所在回路的时间常数
1 fL(H) 2π
④ 频率响应有幅频特性和相频特性两条曲线。
f f 时, 20 lg A lg A L u s 20 u sm
下降 f f 时, 20 lg A 3 dB , -1 L u s
20dB/十倍频
f L f f 时, 20 lg A 20 lg( A L u s u sm ) f f 0 时, A 0 , 90 。 u s
第五章 频域响应法
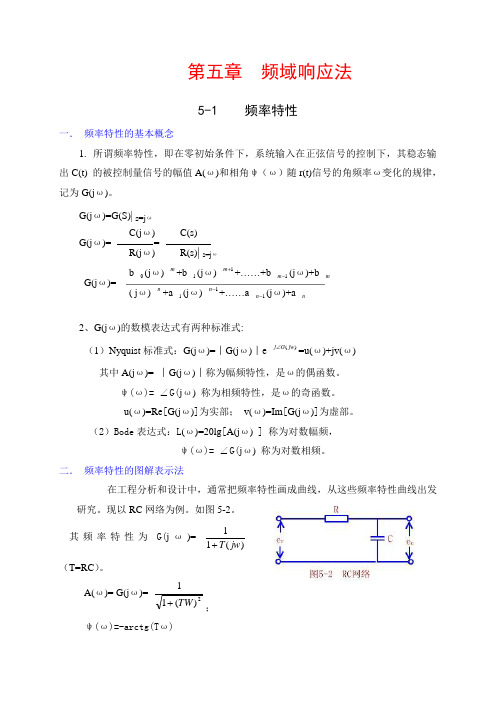
第五章 频域响应法5-1 频率特性一. 频率特性的基本概念1. 所谓频率特性,即在零初始条件下,系统输入在正弦信号的控制下,其稳态输出C(t) 的被控制量信号的幅值A(ω)和相角ψ(ω)随r(t)信号的角频率ω变化的规律,记为G(j ω)。
G(j ω)=G(S)| s=j ω C(j ω) C(s)G(j ω)== R(j ω) R(s)| s=j ωb 0(j ω) m +b 1(j ω) 1+m +……+b 1-m (j ω)+b m G(j ω)=( j ω) n +a 1(j ω) 1-n +……a 1-n (j ω)+a n2、G(j ω)的数模表达式有两种标准式: (1)Nyquist 标准式:G(j ω)=︱G(j ω)︱e)(jw G j ∠=u(ω)+jv(ω)其中A(j ω)= ︱G(j ω)︱称为幅频特性,是ω的偶函数。
ψ(ω)= ∠G(j ω) 称为相频特性,是ω的奇函数。
u(ω)=Re [G(j ω)]为实部; v(ω)=Im [G(j ω)]为虚部。
(2)Bode 表达式:L (ω)=20lg [A(j ω) ] 称为对数幅频,ψ(ω)= ∠G(j ω) 称为对数相频。
二. 频率特性的图解表示法在工程分析和设计中,通常把频率特性画成曲线,从这些频率特性曲线出发研究。
现以RC 网络为例。
如图5-2。
其频率特性为G(j ω)=)(11jw T +(T=RC )。
A(ω)= G(j ω)=2)(11TW +;ψ(ω)=-arctg(T ω)1.极坐标图----Nyquist图当ω=0→∞变化时,A(ω)和φ(ω)随ω而变,以A(ω)作幅值,φ(ω)作相角的端点在s平面上形成的轨迹,称Nyquist曲线(幅相频率特性曲线)简称幅相曲线即Nyquist图,是频率响应法中常用的一种曲线。
2、对数坐标图----Bode图对数频率特性曲线又称Bode曲线,包括对数幅频和对数相频两条曲线。
第5章频率响应(新)

一、频率响应的基本概念 二、频率响应的分析方法
三、单管共射放大电路的高频响应
四、 多级放大器的频响
一、频率响应的概念
中频段:AU=常数 低频段 高频段 AU 下降
幅频特性。 A(jf) 用∣A(jf)∣ 或∣A(j)∣表示 AU
0.707AU
低频截频高频截频 fL 相频特性。用()
-20dB/dec
是一条通过= 0=1,斜率为-20dB/十倍频的斜线。
将零点与极点的影响累加起来,即可得到总的幅频特性
经过一个零点,斜率增加20dB/十倍频 经过一个极点,斜率减小20dB/十倍频
二、相频特性的渐近线描绘 ) 的渐近线相频特性 1. 一阶零点 (1 j 1 ( ) 当<<1时,()=0
20lg1 j 20lg1 j 20lg1 j 2 3 4
) 的渐近线幅频特性 1. 一阶零点 (1 j 1
20 lg1 j 1
2 20 lg 1 ( ) = y 1
当<< 1时,y≈20lg1=0dB 当>> 1时,y=20lh
f
中频段:相位差 =常数 低频段 改变 高频段
(jf)
-90° -180° -270°
f
频率响应的定义
放大电路对输入正弦信号的稳态响应。反映了放大器对 不同频率信号的放大能力。记作A(j)或 A(jf)
频率响应曲线
幅度频率特性:∣ A(j) ∣或∣ A(jf) ∣
布电感等; 影响低频增益—主要是耦合电容和旁路电容 影响高频增益—晶体管的结电容及引线等杂散电容 2.三极管的()是频率的函数。 在研究频率特性时,三极管的低频小信号模型不再适 用,而要采用高频小信号模型。
自动控制原理(第三版)第五章频率响应法
示。 这两条线相交处的交接频率ω=1/T, 称为振荡环节的无阻尼
自然振荡频率。在交接频率附近, 对数幅频特性与渐近线存在
一定的误差, 其值取决于阻尼比ζ的值, 阻尼比越小, 则误差越大, 如表5-4所示。当ζ<0.707时, 在对数幅频特性上出现峰值。根
一个单位长度。设对数分度中的单位长度为L, ω0为参考点, 则 当ω以ω0为起点, 在10倍频程内变化时, 坐标点相对于ω0的距离
为表5-1中的第二行数值乘以L。
第五章 频 率 响 应 法
图 5-4 对数分度和线性分度
第五章 频 率 响 应 法
表 5-1 10倍频程内的对数分度
第五章 频 率 响 应 法
第五章 频 率 响 应 法
图 5-7 比例环节的伯德图
第五章 频 率 响 应 法
2. 积分环节 积分环节的频率特性为
其幅频特性和相频特性为
(5.18)
(5.19)
由式(5.19)可见,它的幅频特性与角频率ω成反比, 而相频特性恒
为-90°。对数幅频特性和相频特性为
(5.20)
第五章 频 率 响 应 法
T), 则有
因此有
这表明φ(ω)是关于ω=1/T, φ(ω)=-45°这一点中心对称的。 用
MATLAB画出的惯性环节的伯德图如图5-14所示(T=1)。
第五章 频 率 响 应 法
图 5-14 MATLAB绘制的惯性环节的伯德图
第五章 频 率 响 应 法
5. 一阶微分环节 一阶微分环节的频率特性为 幅频特性和相频特性为
即 所以, 惯性环节的奈氏图是圆心在(0.5, 0), 半径为0.5的半圆 (
见图5-12)。 对数幅频特性和相频特性为
第五章 频率响应
4、下限频率fL
f L 1 .1 f
5、上限频率fH
2 L1
f
2 L2
f
2 Ln
1 fH
1 .1
1 f
2 H1
1 f
2 H2
1 f
2 Hn
6、通频带BW0.7↓=fH↓-fL↑
第五章 放大器的频率响应
5.1 频率响应概述
5.2 共射放大器的频率响应 5.4 多级放大器的频率响应
5.1 频率响应概述
频率响应:放大器的放大倍数是输入 信号频率的函数。
观察一组实验(阻容耦合共基)
实验条件:输入信号Ui= Uimsint
Uim不变, 改变
ui
ui
uo
uo
ui
ui uo
பைடு நூலகம்uo
三、频率响应的表示
1、基本思想:
波特图 幅频特性:纵轴——用分贝表示放大倍 数:20lg|Au| 相频特性:纵轴—— ( f )
频率采用对数分度
工程上采用渐近直线来近似。
2、 RC低通电路
+
+
R1 Ui
_
C1
Uo
_
+
+
RC低通电路
Ui
_
R1
C1
Uo
_
电压传递函数为:
Uo 1 Au U i 1 j( f / f H )
L1
/ f ) 1 j ( f L2 / f )
f L2 1 2 ( RC RL ) C 2
Ausm
式中: f L1
1 2 ( RS Ri ) C 1
共射基本放大器低频段源电压增益有 两个转折频率fL1和fL2 。如果两者的比值 在四倍以上,可取较大的值作为放大电路 的下限频率fL 。
5 第五章 频率响应分析法

(1)比例环节 (2)惯性环节 (3)振荡环节 (4)积分环节 (5)其他典型环节与最基本环节的关系
16
(1) 比例环节的幅相频率特性曲线
传递函数: G ( s ) K ( K 0 )
由传递函数得频率特性表达式: j ( ) G ( j ) K A ( ) e 由频率特性得幅相频率特性:
以上两个结论是绘制开环幅相曲线的依据
以上两个结论的公式表示分别为:
A ( ) A 1 ( ) A 2 ( )... A n ( ) ( ) 1 ( ) 2 ( ) ... n ( )
24
5.2.3. 开环幅相曲线绘制的三个重要因素
21
5.2 典型环节与开环系统频率特性
1. 典型环节 2. 典型环节的频率特性 3. 开环幅相曲线绘制 4. 开环对数频率特性曲线 5. 延迟环节和延迟系统 6. 传递函数的频域实验确定
22
5.2.3. 开环幅相曲线绘制
若已知标准因子形式的开环传递函数为
K ( h s 1) ( k s 2 k k s 1)
对数相频特性曲线的纵坐标为相频特性的函数值 Φ(w)= -arctg(wT) ,单位是[°]。
9
3. 对数幅相特性曲线(尼科尔斯图)
它是将对数幅频特性和对数相频特性合起来绘制成一条曲线
横坐标为相频特性的函数值
纵坐标为对数幅频特性的函数
( ) G( j ) tg (T )
L ( ) | 2 0 lg A ( ) -1 0 lg T ( ) a rctg T
对数频率特性
2
1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
f
O
20 lg A u
高通
fp2
f
O
阻 fp2
通
阻 fp1
f
图 7.4.17
压控电压源二阶带通滤波电路
u A Auf (3 Auf ) j( f f 0) f0 f
f0
1 ——中心频率 2RC Auf Aup QAuf ——通带电压放大倍数 3 Auf 图 7.4.18 1 Q fbw = fp1 – fp2 = f0 /Q ——通频带 3 Auf
1 fp 2RC
当RC低通滤波电路带上负载RL后,输入信号频率 趋于零时,电容容抗趋于无穷大(开路),通带放大 倍数:
U RL o Aup U RL R i
输入信号频率从0到无穷大时的电压放大倍数为:
U Au o U i fp RL Aup R RL 1 j ( R // RL )C 1 j f fp
U 0 ( s) R2 1 A ( s) = . u U i ( s) R1 1 sR2C
用jω 取代s,且令f0=1/(2π R2C)
图7.4.11反相输入一阶 低通滤波电路
u A
Aup f 1 j f0
fP= f0
2. 二阶电路 在一阶电路的基础上,增加RC环节,可使滤 波器的过渡带变窄,衰减斜率的值加大。
带负载后电路缺点: Aup 减小, p 升高,即二者都会随负载而 变化,不符合信号处理要求。 解决办法:利用集成运放与 RC 电路组成有源滤波器。
1 2 ( R // RL )C
f
2. 有源滤波电路
无源滤波电路受负载影响很大,滤波特 性较差。
为了提高滤波特性,可使用有源滤波电 路。
组成电路时,应选用 带宽合适的集成运放
频率响应或频率特性。
小信号等效模型只适用于低频信号的分析。
本章将引入高频等效模型,并阐明放大电路的上限频 率、下限频率和通频带的求解方法,以及频率响应的 描述方法。
5.1.2 频率响应的基本概念 在放大电路中,耦合电容(容值大)对高 频信号相当于短路,而对于低频信号会在 其上产生压降,导致放大倍数的数值减小 且产生相移。 半导体的极间电容(容值小),对低频信 号开路;对高频信号极间电容会分流,导 致电压放大倍数数值减小且产生相移。
则有:
f f 20 lg Au 20 lg 20 lg 1 fL f L 0 dB 当 f f 时, 20lg A
L u
2
20 lg f L 20 lg f 当 f f L 时, 20 lg A u f fL
20 lg 2 3dB 当 f f L 时, 20 lg A u
Aup f0 2 1 f0 1 ( ) j f Q f
可见高通滤波电路与低通滤波电路的对数幅频特性互 为“镜像”关系。
二、带通滤波电路(BPF)
只允许某一段频带内的信号通过,将此频带以外的信 号阻断。 低通 高通 U U o i
20 lg A u
O
20 lg A u
低通
1 f 1 j fH
1 f 1 fH
2
fH 称为上限截止频率
则: A u
1 1 j H
arctan
f fH
/ dB 20lg A u
对数幅频特性:
0 3dB 20 40
0.1 fH
fH
10 fH
f
20dB/十倍频
无源单级RC电路的频率相应
一、 高通电路
U R Au O 1 Ui R jC 1 1 1 jRC
C
+
U i
+
R
U O
_ 图 5.1.1(a)
_
RC 高通电路
f fL f 1 f L
2
幅频特性
u 模: A
1 1 令: f L 相频特性 2RC 2 L f f j 相角: 90 arctan( ) 1 1 f L f A u 1 f f L 1 1 1 j fL 称为下限截止频率 j L jf fL
第五章 放大电路的频率响应
5.1 频率响应概述
5.2 晶体管的高频等效模型 5.3 场效应管的高频等效模型 5.4 5.5 5.6 单管放大电路的频率响应 多级放大电路的频率响应 集成运放的频率响应和频率补偿
5.1 频率响应概述
5.1.1 研究放大电路频率响应的必要性
由于放大电路中存在电抗性元件及晶体管极间电容, 所以电路的放大倍数为频率的函数,这种关系称为
f
O
f
图 7.4.20
常用有源带阻滤波电路
A u f 2 1 ( ) f0 f 2 f 1 ( ) j2( 2 Aup ) f0 f0 Aup
1 f0 ——中心频率 图 7.4.22常用有源带阻滤波电路 2RC RF Aup 1 ——通带电压放大倍数 R1
1.无源低通滤波器:
信号频率趋于零时,电容容抗 趋于无穷大(开路),通带放 大倍数:
Aup=1
信号频率从0到无穷大时的电压放大倍数为:
Aup U 1 o Au f f Ui 1 j 1 j fp fp
A u Aup f 1 j fp
如图7.3.3实线所示 图 7.3.3
对数相频特性: 在高频段, 低通电路产生 45º 0~ 90°的滞后 相移。 90º
0
0.1 fH
fH 10 fH 45º /十倍频 5.71º
f
5.71º
图 5.1.3(b)
低通电路的波特图
ቤተ መጻሕፍቲ ባይዱ
小结
(1)电路的截止频率决定于电容所在 回路的时间常数τ ,即决定了fL和fH。 (2)当信号频率等于fL或fH放大电路 的增益下降3dB,且产生+450或-450相 移。
容X=1/jwC,物理意义是,系统H(s)对不同的频率分 量有不同的衰减,即这种衰减是发生在频域的,所 以为了与时域区别,引入复数的运算。 在复频域计算的形式仍然满足欧姆定理、KCL、
KVL、叠加法。
四、有源滤波电路的传递函数
通过”拉氏变换“ ,将电压电流变换成像函数 U(S),I(S)。R(S)=R,ZC(S)=1/Sc,ZL(S) =sL 输出量的象函数与输入量的象函数之比
图7.4.4有源滤波电路
拉氏变换是将时间函数f(t)变换为复变函数F(s),或
作相反变换。
时域(t)变量t是实数, 复频域F(s)变量s是复数。变
量s又称“复频率”。
拉氏变换建立了时域与复频域(s域)之间的联系。 s=jw,当中的j是复数单位,所以使用的是复频域。
通俗的解释方法是,因为系统中有电感X=jwL、电
图 5.1.3(a)
相频特性
在低频段,高通电路产生 0 ~ 90° 的超前相移。
二、 RC 低通电路的波特图
1 1 jC Au 1 1 j RC R jC
令 : fH
1 1 2 H 2RC
R
+
U i
+
C
U O
_
_
图 5.1.2
RC 低通电路图
u A
(3)近似分析中,可以用折线化的 近似波特图表示放大电路的频率特 性。
7.4 有源滤波电路
7.4.1 滤波电路的基础知识
作用:选频。 一、滤波电路的种类: 低通滤波器LPF 带通滤波器BPF
20 lg A u
高通滤波器HPF 带阻滤波器BEF
20 lg A u
O
20 lg A u
通 fp
U 0 ( s) A ( s) u U i ( s)
分母中s的最高次幂
称为滤波器的阶数
7.4.2 低通滤波器
一、同相输入低通滤波器
1. 一阶电路
RF
U 0 (s) RF A ( s) (1 )U p ( s ) u U i (s) R1 RF 1 =(1 )( ) R1 1 sRC
7.4.3 其它滤波电路
一、高通滤波电路
高通滤波电路与低通滤波电路具有对称性 1.压控电压源二阶 高通滤波电路 2.无限增益多路反馈 二阶高通滤波电路
图7.4.16二阶高通滤波电路
二阶有源高通滤波器
2 o ( j RC ) Aup U Au U i 1 (3 Aup )jRC ( jRC) 2
缺点:一阶低通有源滤波器在 f > f 0 时,滤波特性不 理想。对数幅频特性下降速度为 20 dB / 十倍频。 解决办法:采用二阶低通有源滤波器。
2. 简单二阶电路
可提高幅频特性的衰减斜率
RF
U 0 ( s) RF U p ( s) A ( s) (1 ) u U i ( s) R1 U i ( s) RF 1 =(1 ) 2 R1 1 3sRC ( sRC )
RF Auf 1 R1
Aup f f 1 jQ ( 0) f0 f
——比例系数
三、带阻滤波器(BEF)
在规定的频带内,信号被 阻断,在此频带以外的信号能 顺利通过。
20 lg A u
U i
低通 高通
U o
O
20 lg A u
低通 f1
f
O
20 lg A u
高通 f2 通 f1 阻 通 f2
用jω 取代s,且令f0=1/(2π RC)
图7.4.7简单二阶低通电路
RF 1 R1 Au f 2 f 1 ( ) j 3 f0 f0
图7.4.8简单二阶低通电路的幅频特性
二、反相输入低通滤波器