静定结构在支座沉降单独作用时的位移
建筑力学静定结构位移计算
4l/5
l/5
三次抛物线ω=hl/4
顶点
(n+1)l/(n+2) l/(n+2)
n次抛物线ω=hl/(n+1)
例:求梁B点转角位移。 例:求梁B点竖向线位移
P
ql2/2
A
EI
B
MP
q
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓
l/2
Pl/4 l/2 MP
A
l
B
P=1 m=1 l 3l/4 1/2
⑥当图乘法的适用条件不满:足时的处理
一、各类静定结构的位移计算公式 1)梁、刚架:只考虑弯曲变形的影响
D = ∑∫(M1 MP /EI) ds 2)桁架:只考虑轴向变形的影响
D = ∑∫(N FNP/EA) ds D = ∑NFNPl/EA 3)组合结构: D = ∑∫(M1 MP /EI) ds +∑∫(N FNP/EA) ds (6-4-3) 4)拱 D= ∑∫(M1 MP /EI) ds +∑∫(NFNP/EA) ds (6-4-4)
建筑力学静定结构位移计算
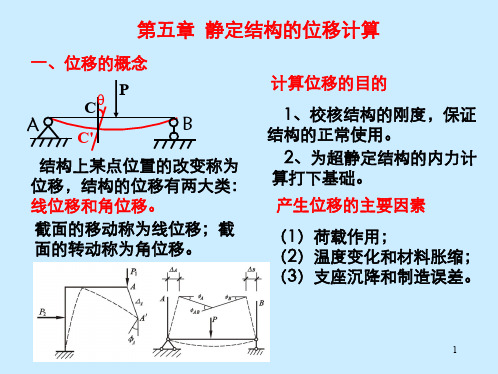
§14-1 计算结构位移的目的
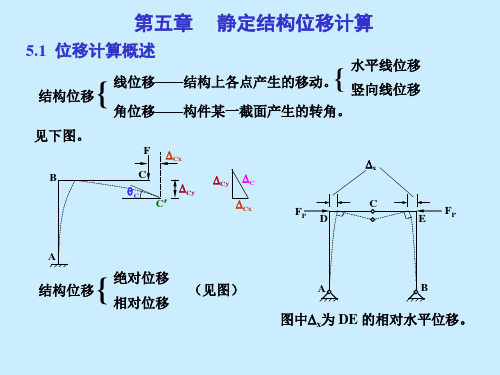
一、结构的位移概念 在外因作用下,结构会发生变形,其上各点或
截面位置发生改变,叫作结构的位移。
平面杆件结构的位移: 1、线位移:水平位移 竖向位移 2、转角位移(角位移)
广义位移概念: 1、绝对位移:一个截面相对自身初始位置的位移; 2、相对位移:一个截面相对另一个截面的位移。 二、计算结构位移的目的 1、验算结构的刚度,使结构的位移或变形不超出规定的范 围,满足结构的功能和使用要求。 2、在结构的制作或施工时,按使用时结构位移的反方向予 先采取措施。 3、引入变形(位移)条件,为计算超静定结构提供基础。
13、静定结构位移计算

§13-3 结构位移计算的一般公式
___
P2 K
P 1
R1
P1
K
实际位移状态
c2
c1
K
M , N , Q , Rk
R2
虚设单位力状态
结构位移计算的一般步骤: (1) 建立虚力状态:在待求位移方向上加虚设单位力; (2) 求虚设单位力状态下的内力及反力 M , N , Q , Rk 的表达式;
A
B
§13-4 荷载作用下的位移计算
例13.2 求ΔCV ,EA=const。 解:1、虚设单位力状态。 P D
2P
P
P
0 0
(NP ) E
P
a
2、求 N 和 N P 。(标示于图中) 3、代入桁架的位移计算公式:A
2P
P
B
C
NNP 4a P P ΔCV l EA 1 1 2 ) ( 2 P ) 2a ( 1) ( P ) 2a 2 P 2a ( EA 2 2 (N ) 1 42 2 Pa 2 2 2 EA 2 2 2 2 6.83 2 Pa ___ EA 1/2 1/2
h
*
l
1 xc l 2
27
§13-5 图乘法
标准三次抛物线
三. 不同结构形式Δ公式的具体应用 梁、刚架: Δ
桁架:Δ
MM P ds EI
NNP l EA
一般情况: Δ 拱
MM P ds EI
Δ 扁平拱:
组合结构: Δ
MMP ds EI
NNP ds EA
2014级《结构力学》复习题及答案

2014级《结构力学》复习题及答案2014级《结构力学》复习题及答案一、填空题:1.图示结构的超静定次数为 7 。
2.图示结构,各杆的EIil都相同,用力矩分配法计算时,分配系数µAB等于 0.5 。
3.图示桁架中A支座的竖向反力(设向上为正)为 0 。
4.图示刚架,P=1在AB段移动,E处剪力F SE的影响线在E点处的竖标为 -1 。
5.图示结构支座位移Δ引起的A点水平位移方向为向右。
6.图示对称桁架中,a杆的轴力为 0 。
7.图示桁架中,零杆的根数为 5 根(不含支座链杆)。
8.图示刚架,各杆线刚度相同,用力矩分配法计算时,分配系数μ21= 4/5 ,μ23= 0 ,μ24= 1/5 。
9.位移法典型方程中的系数有r ij = r ji 的关系,它是由 反力互等 定理得到的结果。
10.图示桁架零杆根数为 7 根。
11.若三铰拱上所有截面的弯矩都等于零而且只有轴力,则这时的拱轴线称为 合理拱轴线 。
12.图示结构的动力自由度为 3 (不计杆件质量)。
二、单项选择题:1.图示刚架中,支座B的位移Δ引起B截面的角位移(顺时针为正)为( C )A. Δ/hB. -Δ/hC. Δ/LD. -Δ/L2.图示体系是 ( B )A. 常变体系B. 瞬变体系C. 无多余联系的几何不变体系D. 有多余联系的几何不变体系3.图示体系是( D )A. 瞬变体系B. 常变体系C. 有多余联系的几何不变体系D. 无多余联系的几何不变体系为 ( A )4.图示连续梁,力矩分配系数µBCA. 2/3B. 1/2C. 1/3D. 1/45.图示结构的超静定次数为( C )A. 4B. 3C. 2D. 16.图示桁架中A支座的竖向反力(设向上为正)为( A )A. 0B. 0.5PC. 0PD. 2P7.图示三铰刚架支座A的水平约束反力为( B )A. PB. P/4C. P/2D. 3P/48.图示三铰拱,链杆AB的轴力为(以拉为正)( B )A. -P/2B. P/2C. .P/4D. -P/49.在一个无多余联系的几何不变体系上加上一个二元体,得到的体系为 ( B )A. 有多余联系的几何不变体系B. 无多余联系的几何不变体系C. 常变体系D. 瞬变体系10.位移法典型方程实质是( B ) A. 位移条件 B. 平衡条件C. 物理条件D. 平衡条件和位移条件11.在一个几何瞬变体系上加上一个二元体,得到的体系为 ( C ) A. 无多余联系的几何不变体系 B. 有多余联系的几何不变体系 C. 瞬变体系 D. 常变体系12.求解位移法典型方程中的自由项R 2P 时,要用到 ( D ) A. 1M 图 B. 2M 图 C. 3M 图 D. M P 图13、图 示 体 系 的 几 何 组 成 为 : ( A ) A. 几 何 不 变 , 无 多 余 联 系 ; B. 几 何 不 变 , 有 多 余 联 系 ; C. 瞬变 ; D. 常 变 。
静定结构的位移计算

静定结构的位移计算第4章 静定结构的位移计算4.1 结构位移的概念4.1.1 结构位移结构都是由变形材料制成的,当结构受到外部因素的作用时,它将产生变形和伴随而来的位移。
变形是指形状的改变,位移是指某点位置或某截面位置和方位的移动。
如图 4.1(a)所示刚架,在荷载作用下发生如虚线所示的变形,使截面A 的形心从A 点移动到了A ′点,线段AA ′称为A 点的线位移,记为A ∆,它也可以用水平线位移Ax ∆和竖向线位移Ay ∆两个分量来表示如图4.1(b)。
同时截面A 还转动了一个角度,称为截面A 的角位移,用A ϕ表示。
又如图4.2所示刚架,在荷载作用下发生虚线所示变形,截面A 发生了A ϕ角位移。
同时截面B 发生了B ϕ的角位移,这两个截面的方向相反的角位移之和称为截面A 、B 的相对角位移,即B A AB ϕϕϕ+=。
同理,C 、D 两点的水平线位移分别为C ∆如D ∆,这两个指向相反的水平位移之和称为C 、D 两点的水平相对线位移,既D C CD ∆+∆=∆。
除上述位移之外,静定结构由于支座沉降第4章静定结构的位移计算70等因素作用,亦可使结构或杆件产生位移,但结构的各杆件并不产生内力,也不产生变形,故把这种位移称为刚体位移。
一般情况下,结构的线位移、角位移或者相对位移,与结构原来的几何尺寸相比都是极其微小的。
4.1图71第4章静定结构的位移计算引起结构产生位移的主要因素有:荷载作用、温度改变、支座移动及杆件几何尺寸制造误差和材料收缩变形等。
4.1.2 结构位移计算的目的1. 验算结构的刚度结构在荷载作用下如果变形太大,即使不破坏也不能正常使用。
既结构设计时,要计算结构的位移,控制结构不能发生过大的变形。
让结构位移不超过允许的限值,这一计算过程称为刚度验算。
2. 解算超静定计算超静定结构的的反力和内力时,由于静力平衡方程数目不够,需建立位移条件的补充方程,所以必须计算结构的位移。
3. 保证施工在结构的施工过程中,也常常需要知道结构的位移,以确保施工安全和拼装就位。
《结构力学》静定结构的位移计算

A
x
C
x
C
∆AV
l 2 l 2
(a) 实际状态 1)列出两种状态的内力方程: )列出两种状态的内力方程:
AC段 0 ≤ x ≤ 段 l 2
B
l 2
l 2
(b) 虚设状态
N =0 M = −x Q = −1
NP = 0 MP = 0 Q =0 P
2
2
∆Q ∆Q h 1 h 1 当 = 时, = 1.83%;当 = 时, = 7.32% l 10 ∆M l 5 ∆M
计算屋架顶点的竖向位移。 例2 计算屋架顶点的竖向位移。
q(N/m )
1 1 1
4.5
3.0
1.5
P 2
P
D
C
ql P= 4 P
F G 0.25l
NP
1
1.5
P 2
B 0 1.5 0.5 0
二、利用虚功原理,用单位荷载法求结构位移一般公式: 利用虚功原理,用单位荷载法求结构位移一般公式:
K
K′
实际状态 (位移状态) 外虚功: 外虚功:W
e
∆
t1 t2
c2 c1
1
R 1
虚拟状态 (力状态) 内虚功: 内虚功:W
i
R2
= 1 ⋅ ∆ + ∑ Rk ⋅ ck
1 ⋅ ∆ + ∑ R k ck = ∑ ∫ (Mκ + N ε + Q γ )d s
第4章 静定结构的位移计算
Calculation of Statically Displacement Structures
目
录
§4-1 结构位移和虚功的概念 §4-2 变形体系的虚功原理和单位荷载法 §4-3 静定结构由荷载所引起的位移 §4-4 图乘法 §4-5 互等定理
建筑力学(二)复习题(很多道题)

建筑⼒学(⼆)复习题(很多道题)建筑⼒学(⼆)复习题⼀、判断题1、⼏个刚⽚之间只要⽤三个铰两两相连,就能构成⽆多余约束的⼏何不变体系。
()2、三个刚⽚由三个铰相连的体系⼀定是静定结构。
()3、静定结构的内⼒可能与杆件的刚度有关。
()4、静定结构是⽆多余约束的⼏何不变体系。
()5、当⼀组不平衡的外荷载作⽤在附属部分时,基本部分必受⼒。
()6、当外荷载只作⽤在基本部分时,附属部分不受⼒。
()7、不共线的⼆杆节点,⼆杆均为零杆。
()8、⽆外⼒作⽤的⼆杆节点,⼆杆均为零杆。
()9、组合结构中,链杆的内⼒只有轴⼒,⽽梁式杆的内⼒只有弯矩和剪⼒。
()10、组合结构中,链杆的内⼒只有轴⼒,⽽梁式杆的内⼒中没有轴⼒。
()11、在竖向荷载作⽤下,三铰拱任⼀截⾯的弯矩等于对应简⽀梁同⼀截⾯的弯矩。
()12、在竖向荷载作⽤下,三铰拱任⼀截⾯的剪⼒等于对应简⽀梁同⼀截⾯的剪⼒。
()13、在荷载作⽤下,桁架的位移主要是由各杆的轴向变形引起的。
()14、在荷载作⽤下,刚架和梁的位移主要是由各杆的弯曲变形引起的。
()15、⼒法的基本⽅程是⼒的平衡⽅程。
()16、超静定结构中有⼏个多余约束就有⼏个建⽴⼒法⽅程的变形条件。
()17、结构有⼏个刚结点就有⼏个结点⾓位移基本未知量。
()18、位移法基本⽅程的物理意义表⽰附加约束的反⼒等于零。
()19、在⼒矩分配法中,同⼀刚性结点处各杆端的⼒矩分配系数之和等于1。
()20、⼒矩分配法仅适⽤于解⽆线位移未知量的结构。
()⼆、填空题1、连接两个刚⽚的⼀个单铰相当于个约束。
2、从⼏何组成上讲,静定和超静定结构都是⼏何体系。
3、当作⽤于静定结构上的某⼀⼏何不变部分上的荷载作等效变换时,只是该部分的发⽣变化,⽽其余部分的内⼒保持不变。
4、⼒法典型⽅程中,系数矩阵主对⾓线上的系数称为系数,其余系数称为副系数。
5.三个刚⽚⽤____________三个铰两两相联,组成⼏何不变体系,且⽆多余约束。
6.三铰拱的合理拱轴决定于____________和三个铰的位置。
05.静定结构的位移计算

A
计
例3:求图示桁架(各杆EA相同)k点 水平位移. 解:构造虚设的力状态
kx N P Nil EA
P
P
0
NP
0
P
a
2P
k
a
1
1 [( P )(1)a ( P )(1)a EA
Pa 2 P 2 2a ] 2(1 2 ) ( ) EA
1
2 2
2m
2m
2m
FB
0.67
1
0.33
0.25
1 .5
0 .5
1
二、变形体系的虚功原理和单位荷载法
(一)虚应变能
力状态的内力因位移状态的 相对变形而作虚功,这种虚 功称为虚应变能。
力状态
位移状态
V FN 1du2 FQ1dv2 M 1d2
V FN 1 2 dx FQ1 2 dx M1 2 dx
MP QP
q
[
q(l x)k q(l x) ]dx 0 GA 2 EI qkl2 ql 4 () 2GA 8EI
l 3
Mi
P 1
Qi lx
qkl2 ql 4 ip () 2GA 8EI ql 4 qkl2 设 : M , Q 8EI 2GA Q 4 EIk M GAl2 A bh, I bh3 / 12, k 6 / 5,
(二)变形体的虚功原理
一个具有理想约束的变形体体系,若发生满足约束允许的 微小位移和变形(可能的),则该变形体体系上任意平衡 外力力系(可能的),在该位移上所作的总外力虚功等于 变形虚功。
W=V
对于直杆构成的结构
静定结构位移计算
⑷需求某两截面相对角位移时,应在两截面处加一对大小相等、转向相反
的单位力偶矩 m=1,如图(d)。
F=1 • A
(a)
m=1 •A
•A
F=1
(b)
F=1
•
B
(c)
•
B m=1
•A m=1
(d)
*⑸需求桁架某杆件角位移或某两杆相对角位移时,因桁架只受轴力,故
须将单位力偶矩 m=1 转化为
1 d
的结点力作用在该杆两端上,下图
结构在使用过程中不允许产生过大变形,必须加以限制。 ⑵为制作和架设结构提供计算依据(如起拱,作图说明)。 ⑶为分析超静定结构作准备。 使结构产生位移的因素主要有三个: ⑴荷载作用。 ⑵温度变化和材料热胀冷缩。 ⑶支座沉降和制造误差。 计算结构位移的两种方法: ⑴以杆件变形关系为基础的几何物理方法。
如计算梁挠度、转角的重积分法。 ⑵以功能原理为基础的单位荷载法,即以虚功原理为基础的单位荷载法。
A l
x B (a) 单位力作用下的弯矩表达式为:
M = -x
1
实际荷载作用下的弯矩表达式为:
A l
B (b)
x
MP
=
-
qx 2 2
故 B 端竖向位移为:
ΔBy =
l MP (x)M(x)dx = 1
0 EI
EI
l (-
0
1qx2 )(-x)dx 2
=
1 qx4 [
EI 8
Δ =
MP (x)M(x)dx + FNP FN L
EI
EA
(5-8)
(梁式杆)
(链杆)
*⑷拱和曲杆
对于一般的拱和曲杆,通常只考虑弯曲变形的影响,即可按梁和刚架
基础知识-结构力学_真题(含答案与解析)-交互(105)(418)
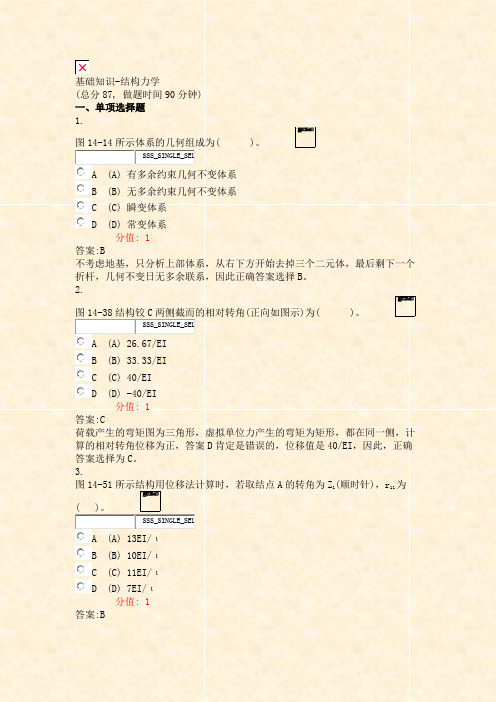
基础知识-结构力学(总分87, 做题时间90分钟)一、单项选择题1.图14-14所示体系的几何组成为( )。
SSS_SINGLE_SELA (A) 有多余约束几何不变体系B (B) 无多余约束几何不变体系C (C) 瞬变体系D (D) 常变体系分值: 1答案:B不考虑地基,只分析上部体系,从右下方开始去掉三个二元体,最后剩下一个折杆,几何不变日无多余联系,因此正确答案选择B。
2.图14-38结构铰C两侧截而的相对转角(正向如图示)为( )。
SSS_SINGLE_SELA (A) 26.67/EIB (B) 33.33/EIC (C) 40/EID (D) -40/EI分值: 1答案:C荷载产生的弯矩图为三角形,虚拟单位力产生的弯矩为矩形,都在同一侧,计算的相对转角位移为正,答案D肯定是错误的,位移值是40/EI,因此,正确答案选择为C。
3.图14-51所示结构用位移法计算时,若取结点A的转角为Z1(顺时针),r11为( )。
SSS_SINGLE_SELA (A) 13EI/ιB (B) 10EI/ιC (C) 11EI/ιD (D) 7EI/ι分值: 1答案:B竖向杆件与A点以铰节点相连接,无转动剐度,r11=10EI/ι;正确答案为B。
4.图14-55所示结构中( )。
SSS_SINGLE_SELA(A) MCD=0,CD杆只受轴力B(B) MCD≠0,外侧受拉C(C) MCD≠0,内侧受拉D(D) MCD =0,FNCD=0 分值: 1答案:D本题为基附型结构,力作用在基本部分上时,附属部分不受力,CD杆件在附属部分上,因此CD杆件无内力。
因此正确答案为D。
5.三个刚片每两个刚片之间由一个铰相连接构成的体系是( )。
SSS_SINGLE_SELA (A) 几何可变体系B (B) 无多余约束的几何不变体系C (C) 瞬变体系D (D) 体系的组成不确定分值: 1答案:D仅仅为三刚片规则的必要条件,非充分条件,因此正确答案为D。
静定结构的位移计算概述

图10-1
不同的截面具有不同的线位移和 角位移。结构除了在荷载作用下会产 生位移外,温度改变、支座移动、材 料胀缩和制造误差等非荷载因素也会 使结构产生位移。本章主要研究结构 在荷载作用下的位移计算问题。
1. 2 计算结构位移的目的
计算结构位移的目的主要有以下几方面:
1. 校核结构或构件的刚度 刚度是指结构或构件在荷载作用下抵抗变形的能力。为确保结构或构件在使 用过程中不致发生过大变形而影响结构的正常使用,需要校核结构或构件的刚度。
建筑力学
静定结构的位移计算概述
1. 1 结构位移的概念和影响因素
结构在外界因素 ( 荷载、温度变化、支座沉降等 ) 作用下将产生内力和变形。 由于变形,必然导致结构上各点的位置发生移动,同时截面也将发生转动,这些位 置改变量称为结构的位移。
结构的位移一般分为线位移和角位移两 种。图10-1a 所示的刚架在荷载作用下,结构 产生图中虚线表示的弯曲变形,引起刚架的 A 点位置发生了改变,即 A 点移动到 A' 点, 产生线位移为 ΔA ,而线位移 ΔA 通常分解为 水平方向的分位移 ΔH和铅垂方向的分位移 ΔV , 如图10-1b 所示。与此同时,截面 A 还产生角 位移,如图10-1a 所示。
2. 为超静定结构的内力分析奠定基础 超静定结构的内力计算只通过平衡条件是不能完全确定的,还必须同时考虑 变形条件,即超静定结构要同时满足平衡条件和变形连续条件,而建立变形连续条 件时需要计算结构的位移。
3. 便于结构或构件的制作和施工 结构或构件在制作、施工等过程中需要预先知道该结构或构件可能发生的位 移,以便采取必要的措施 (建筑起拱),确保结构或构件的正常使用。
建筑力学
由此可见,结构的位移计算在结构分析和实际工程中具有重要的意义。
静定结构位移计算

真实的位移状态
运用变形体的虚功原理,所有外力所做的虚功等 于内力所做的虚功:
§6-5
温度作用时的计算
t
h ds
有: F N d + Md F N t0ds + M 若是结构,则公式为:
F d + Md F t0ds + M
1 A
△11 △12
Fp1
2 Fp2
B
△22
其中:T FP1 12 ——虚功 ▲ 虚功原理 刚体虚功原理 变形体虚功原理
§6-1
概述
刚体虚功原理: 所有外力所做的虚功等于零,即: W外 0 变形体虚功原理:
W W 外 内 所有外力做的虚功=所有内力做的虚功,即:
虚功原理
虚力原理 虚位移原理
§6-1
概述
很显然求位移用的是虚功原理中的虚力原理 。 2)静定结构位移的类型 支座移动产生的位移——刚体位移 荷载作用产生的位移——变形体位移 制造误差产生的位移——刚体位移 温度改变产生的位移——变形体位移 显然支座移动产生的位移、制造误差产生的位移应 该用刚体的虚力原理计算。荷载作用产生的位移、温 度改变产生的位移应该用变形体的虚力原理计算。
YC δX=1
0.75
虚功方程为: YC×1 +qa×0.75 -qa2×0.75/a -q×1.5×3a/2=0 YC=2.25qa
qa
F
qa2
E
q
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓
a
2a qa2
D
a
C QC
2a
B
a
A
qa
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓
QC
结构力学 静定结构的位移计算1
P
A
3.位移计算的一般公式
设:结构受荷载的作用, 及支座移动,求A点的竖 向位移。
W外=W变
外力所作的虚功总和W外,等于 各微段截面上的内力在其虚变 形上所作的虚功的总和W变 。
1)位移状态的设定 q
P A
dx
a) 若求结构上C点的竖向位移,
2) 若求结构上截面A的角位移,可在截面处加一单位力矩。
若求桁架中AB杆的角位移,应 加一单位力偶,构成这一力 偶的两个集中力的值取 1/d。 作用于杆端且垂直于杆(d等 于杆长)。
3) 若要求结构上两点(A、B)沿其连线 的相对位移,可在该两点沿其连线 加上两个方向相反的单位力。
A
2)作 M 图 P=1
A C
1.5 M1 图
B 2m
6
B
B
D
66
A
BB
D
9
1
CV
1 1 61.5 3
EI 2
2 2 3 9 5 1.5
EI 3
8
189
=
(向下)
4EI
2)作 M 图
A
BD
6 6
M2 图
A
BB
D
9
1
D
1 EI
一、概述
1.位移的种类
1) 角位移:杆件横截面产生的转角 2) 线位移:结构上各点产生的移动 3) 相对位移(相对角位移,相对线位移)
Aθ
Δ A
θ
(A截面的转角θ )
(A结点的水平线 位移Δ,转角θ)
ΔA A
第二章静定结构的受力分析
第二章静定结构的受力分析第一节静定结构的特性一、静定结构的性质( )( )2-1-7 图2-1-7所示结构 B 。
( ) 2-1-8 图2-1-8示结构中|(二)选择题2-2-1 A .C .有内力、无位移、无应变; D .无内力、无位移、有应变。
2-2-2 对于一个静定结构,下列说法错误的有哪些:( ) A .只有当荷载作用于结构时,才会产生内力; B .环境温度的变化,不会产生内力;C .杆件截面尺寸及截面形状的任意改变均不会引起内力改变;D .制造误差与支座沉降可能使得结构形状发生变化,因此可能产生内力。
2-2-3 静定结构由于支座沉降(位移)或制造误差,结构内部将:( ) A .有内力、有位移; B .无内力、有位移; C .有内力、无位移; D.无内力、无位移。
2-2-4 静定结构由于支座沉降(位移),结构内部将:( ) A .有应变、有位移; B .无应变、有位移; C .有应变、无位移; (D)无应变、无位移。
(三)填空题2-3-12-3-2 。
2-3-3 已知AB 梁的值为__________ kN ·m2-3-7 比较图2-3-3a、b三、习题答案2-1-1 O2-1-2 X2-1-3 O;2-1-4 O。
提示:ACB为附属部分,根据性质7。
2-1-5 X。
提示:静定结构在温度变化时不产生内力。
2-1-7 X。
提示:附属部分上无荷载,因此附属部分无内力和反力。
2-1-8 O。
提示:静定结构内力图与杆件刚度无关,因此该结构为对称结构受反对称荷载。
2-2-1 B;2-2-2 D;2-2-3 B;2-2-4 B;2-3-1 支座移动,位移,支座移动;2-3-2 静力平衡条件;2-3-3 20。
提示:静定结构内力与刚度无关,因此无论刚度怎样变化,并不影响内力图。
2-3-6 相同,不同。
第二节多跨静定梁和刚架一、基本概念1、分段叠加法作弯矩图(1)选定外力的不连续点(如集中力作用点、集中力偶作用点、分布荷载的起点和终点等)为控制截面,求出控制截面的弯矩值。
结构力学 第4章 静定结构的位计算

例如,图1(a)所示两个梯形应用图乘法,可不必求 梯形的形心位置,而将其中一个梯形(设为MP图)分成 两个三角形,分别图乘后再叠加。
图1
对于图2所示由于均布荷载q所引起的MP图,可以 把它看作是两端弯矩竖标所连成的梯形ABDC与相应简
支梁在均布荷载作用下的弯矩图叠加而成。
四、几种常见图形的面积和形心的位置
零。
P
2Δ
PP2P30
22
2
YA P/2
YB P/2
2.变形体系的虚功原理 We Wi
体系在任意平衡力系作用下,给体系以几何可能的
位移和变形,体系上所有外力所作的虚功总和恒等于体
系各截面所有内力在微段变形位移上作的虚功总和。
说明: (1)虚功原理里存在两个状态:力状态必须满足平衡条件;位移状态
PR3 PRk PR
4EI 4EA 4GA
M N Q
P θ
P=1
钢筋混凝土结构G≈0.4E 矩形截面,k=1.2,I/A=h2/12
Q M
kGEAI2R14Rh2
N M
I AR2
1 h2 12R
如 h 1 , 则Q 1 , N 1
1
EA 2(1 2)Pa()
1 2
1
EA
2
1
例3.求图示1/4圆弧曲杆顶点的竖向位移Δ。
解:1)虚拟单位荷载
2)实际荷载
虚拟荷载
ds
M P PR sin
M R sin
QP P cos
Q cos
dθ
N P P sin
N sin
d d ds d
d dd sd sN Pds
建筑力学第五章_静定结构位移计算
1)图乘法的应用条件
1、杆件为直杆; 2、各杆段的EI分别等于常数;
形心
ω
A
B
3、M、MP图中至少有一个是直线图形。
y
2)图乘法的计算公式
A
B
Δ
=
Σ
ωi yi EI
为任一弯矩图(直线或曲线均可)的面积
y为面积为的弯矩图图形的形心对应的直线弯矩图的纵坐 标,即y必须在直线图上量取。
公式正负号规定:若与y 在杆件的同一侧时,乘积取正值,
1
二、位移计算的一般公式
虚功和虚功原理
功、广义力、广义位移 物理上定义:W = F·S F—集中力;S—线位移 现在将此式的定义扩大: W = P 式中: W—广义功; P—广义力; — 与P相应的广义位移 功的正负号规定:当力P与相应位移Δ方向一致时,功为正; 两者方向相反时,功为负。
虚功
1、 定义:凡力在其它因素引起的位移上所做的功,称为 虚功。
①增加中间支座
5ql 4 fa 384EI
而
1
fb 38 fa
28
②两端支座内移
如图所示,将简支梁的支座向中间移动而变成外伸梁, 一方面减小了梁的跨度,从而减小梁跨中的最大挠度;另 一方面在梁外伸部分的荷载作用下,使梁跨中产生向上的 挠度(图c),从而使梁中段在荷载作用下产生的向下的 挠度被抵消一部分,减小了梁跨中的最大挠度值。
MAB A
qL2/8
A
B
MBA
+
B A
B
qL2/8
A
B
15
C
例1:试用图乘法计算如图所 MP图 A ω1
B
示简支梁跨中截面C的竖向位
移ΔC和B端的角位移φB。EI为
《结构力学》静定结构的位移计算

03
在实际应用中,可以根据结构特点、计算精度和计算资源等因素综合考虑选择 合适的数值方法。
THANKS FOR WATCHING
感谢您的观看
桥梁横向位移限制
对于大跨度桥梁,需要限制其在风荷载、地震等横向力作用下的横 向位移,以保证桥梁的稳定性和行车安全。
支座位移控制
桥梁支座的位移也需要进行控制,以避免支座过度磨损或脱空等现 象,确保桥梁的正常使用。
建筑工程中变形缝设置要求
伸缩缝设置
为避免建筑物因温度变化、地基沉降等因素而产生裂缝或 破坏,需要在建筑物的适当位置设置伸缩缝,使建筑物能 够自由伸缩。
计算方法
采用分段叠加法,将组合结构分成若 干段,分别计算各段的位移再求和; 或采用有限元法直接求解整体位移。
需考虑不同材料或截面的变形协调问 题。
03 图乘法计算静定结构位移
图乘法基本原理及适用条件
基本原理
图乘法是基于结构力学的虚功原理,通过图形面积与形心位置的乘积来简化计 算结构位移的一种方法。
均布荷载作用
荷载沿梁长均匀分布,引 起梁产生均匀弯曲变形。
位移计算
采用图乘法或积分法求解, 考虑荷载、跨度、截面惯 性矩等因素。
悬臂梁在集中力作用下位移
悬臂梁基本概念
一端固定,另一端自由的 梁,承受集中力、均布荷 载等。
集中力作用
在悬臂梁自由端施加集中 力,引起梁产生弯曲和剪 切变形。
位移计算
采用叠加原理,分别计算 弯曲和剪切变形引起的位 移,再求和。
制造误差对结构位移的影响不同。
影响系数
02
利用影响系数可以计算制造误差引起的结构位移,影响系数与
结构形式和荷载情况有关。
敏感性分析
基础知识-结构力学(二)_真题(含答案与解析)-交互

基础知识-结构力学(二)(总分52, 做题时间90分钟)单项选择题(下列选项中,只有一项符合题意)1.图14-1-1(a)所示的结构体系为( )。
A.几何瞬变体系B.几何不变体系,有多余约束C.几何常变体系D.儿何不变体系,无多余约束SSS_SIMPLE_SINA B C D分值: 1答案:D[解析] 顶部的三角形桁架是儿三个二元体杆件,应用三刚片原则分析下部结构。
如图(b)所示,刚片Ⅰ、Ⅱ交于实铰(1,2),刚片Ⅰ、Ⅲ交于虚铰(3,1),刚片Ⅱ、Ⅲ交于虚铰(2,3)。
三铰点不共线,故矩形体系为儿何不变体系且无多余约束。
2.图14-1-2(a)所示结构体系为( )。
A.二刚片规则分析为几何不变体系B.二刚片规则分析为几何瞬变体系C.三刚片规则分析为几何不变体系D.三刚片规则分析为几何瞬变体系SSS_SIMPLE_SINA B C D分值: 1答案:B[解析] 将A、C处的支座链杆用铰A、C代替,并将看似刚片的曲杆AD、CE用直线链杆代替。
如图14-1-2(b)所示,DBE为一刚片,大地则看作另一刚片,则刚片DBE与地面用交于D点的三链杆相连,根据几何不变体系组成规则中的二刚片规则,可知此结构体系为瞬变体系。
3.图14-1-3所示结构体系的几何组成为( )。
A.无多余约束的几何不变体系B.有一个多余约束的几何不变体系C.有两个多余约束的几何不变体系D.瞬变体系SSS_SIMPLE_SINA B C D分值: 1答案:A[解析] 体系与基础是简支,依据扩大刚片法,在上部结构中,把铰接三角形125和237分别看作为刚片Ⅰ、Ⅱ,再把杆46看作刚片Ⅲ。
刚片Ⅰ、Ⅱ之间由铰2相连,Ⅰ、Ⅲ之间由链杆14和56相连,Ⅱ、Ⅲ之间由链杆34和67相连,形成两个虚铰,且与实铰2不共线。
4.下列说法不正确的是( )。
A.几何可变体系可能有多余联系B.静定结构一定无多余联系C.静定结构的制造误差不会产生内力D.有多余约束的体系一定是超静定结构SSS_SIMPLE_SINA B C D分值: 1答案:D[解析] D项,超静定结构的几何特征是:几何不变,有多余约束。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
静定
1. 虚功原理算位移的一般公式: ki Md Vrds Ndu Rc ϕ∆=++-∑∑∑∑⎰⎰⎰
2. 单独沉降公式:
ki Rc ∆=-∑
注意:①虚功原理——建虚拟状态(在所求位移点的位移方向上作用一个单位虚拟力) ②实际装状态——支座沉降(支座沉降的位移,包括水平位移、竖向位移和转角) R :虚拟状态中与所求位移C 点沉降支座产生的支反力。
注:没有产生沉降的支座不用考虑。
C :实际状态中实际发生的支座沉降的量(或叫值)(包括水平位移、竖向位移和转角) 强调:Rc 有正负取值(同向为正异向为负,所谓同向就是虚拟状态下的支反力的方向和实际状态下支座位移的方向相同,反之为负)
例:B 支座沉降,求C 点的竖向位移cy ∆。
B1
解:(1)
×
由虚拟状态可得:
0A M =∑ 12B y =(上) , 0C M =∑ 23B X =(左) 带入公式得:2125(43)326
--⨯-⨯=cm(下) 支座水平虚拟水平分力向左,支座位移向右,方向相反,所以取负,竖向亦然。