测量误差的基本知识
测量学 测量误差基本知识
B 观测者的误差
C 测量误差
D 外界条件的变化
难度系数 c
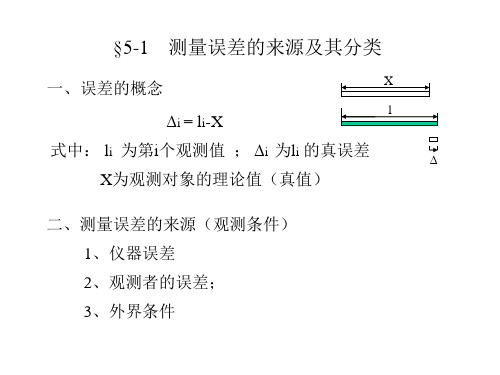
若观测量的真值为X,观测值为li(i=1,2,…,n),其算术 平均值为L,则描述观测值的(真)误差的正确表达式是 (A )
A 观测值的(真)误差为 i= li -X; B 观测值的(真)误差为 i = X-L; C 观测值的(真)误差为 i = L-X; D 观测值的(真)误差为 i= li -X;
难度系数 A
L1、L2、L3为一组等精度观测值,其误差分别为-7mm, -2mm, +7mm,则它们的精度为( A )
A L1、L2、L3的精度相同; B L1最高、L3最低; C L3最高、L1最低; D L2最高、L1与L3相同 。
难度系数 B
丈量了D1、D2两段距离,其观测值及中误差分别为: D1=105.53m±0.05m,D2=54.60m±0.05m,这说明 ( A B ).
A D1和D2的中误差相同, B D1的相对精度高于D2的相对精度 C D1和D2的中误差不相同 D D1的相对精度低于D2的相对精度 E D1的相对精度与D2的相对精度相同。
难度系数 B
难度系数 B
精度指标
衡量精度的指标有:( A C D )
A 中误差
B 对中误差
C 相对误差
D 容许误差
E 偶然误差
难度系数 C
若水平角测量的中误差为6,则其极限误差可以取 值为( C E )
A 3
B 6
C 12
D 15
E 18
难度系数 C
观测值L1、L2为同一组等精度观测值,其含义是( C D E ) A L1、L2的真误差相等 B L1、L2的改正数相等 C L1、L2的中误差相等 D L1、L2的观测条件基本相同 E L1、L2服从同一种误差分布
测量误差的基本知识
如经纬仪测角的照准误差 水准仪在水准尺上的估读误差
对358个三角形在相同的观测条件下观测了全 个三角形在相同的观测条件下观测了全 部内角,三角形内角和的真误差∆ 三角形内角 部内角,三角形内角和的真误差∆i=三角形内角 和测量值-180˚ 其结果如表 分析三角形内角和 其结果如表, 和测量值 的误差∆ 的规律。 的误差∆i的规律。
m L m =± ⋅ m = ± 站 ⋅ L = ±µ ⋅ L = ± L ⋅ m h km 站 S S
误差传播应用示例—角度测量 误差传播应用示例 角度测量
1、菲列罗公式—由三角形闭合差计算测角中误差 、菲列罗公式 由三角形闭合差计算测角中误差 设在三角网中等精度观测各三角形内角, 设在三角网中等精度观测各三角形内角,其测角中误差 均为mβ, 各三角形闭合差f i,闭合差的中误差mΣ为
三、容许误差
据偶然误差的第一特性: 据偶然误差的第一特性:在一定观测条件下偶然 误差的绝对值不会超过一定限值。 误差的绝对值不会超过一定限值。
P(−σ < ∆ < +σ) = 68.3% P(−2σ < ∆ < +2σ) = 95.5%
测量误差基本知识(全面实例)
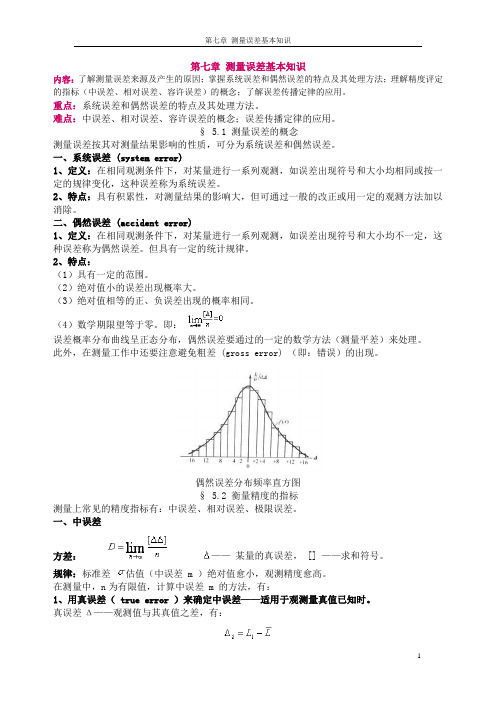
频率直方图
偶然误差具有正态分布的特性
四个特性:有界性,趋向性,对称性,抵偿性:
1 2 n 0 lim lim n n n n
(5-1-2)
y
正态分布曲线
-ห้องสมุดไป่ตู้4
-21 -15 -18 -12
-9 -6
-3 +3 +9 +15 +21 0 +6 +12 +18 +24
第五章第六章
第五章 测量误差基本知识
内容提要:
第五章 测量误差基本知识
学习要点
◆建立测量误差的基本概念 ◆观测值的中误差 ◆观测值函数的中误差
内容提要第 六章
——误差传播定律 ◆权的概念
#测量误差的基 本概念
5.1 测量误差的分类
讨论测量误差的目的:
用误差理论分析、处理测量误差,评定 测量成果的精度,指导测量工作的进行。
2
2
2
(5-5-10)
三.几种常用函数的中误差
求观测值函数中误差的步骤:
三.几种常用函数 的中误差
(1).列出函数式; (2).对函数式求全微分; (3).套用误差传播定律,写出中误差式。 例3:已知某矩形长a=500米,宽b=440米。如边长测量 的相对中误差为1/4000,求矩形的面积中误差mp。 解:由题意 ma 500 / 4000 0.125米, mb 440 / 4000 0.11米
平均
表5-3 算
vv
计
854245[ 0 ]
16算术平均值: 25 l1 l2 l3 l4 l5 x 854245 9 5 1 观测值的中误差: 9 [vv] 60 m 3". 9 n 1 5 1 [ 60 ]
测量误差基本知识
◆ 测量误差的分类
(1)系统误差:在一定条件下对某量误差的符号和大小保持不 变后按照一定规律变化(累积性)
(2)偶然误差:在一定条件下进行一系列观测,误差大小和 符号都表现出随机性
n
n
n n
特性(1)、(2)、(3)决定了特性(4),特性(4)具有实用意义。
偶然误差具有正态分布的特性
当观测次数n无限增多(n→∞)、误差区间d无限缩小 (d→0)时,各矩形的顶边就连成一条光滑的曲线, 这条曲线称为 “正态分布曲 线”,又称为 “高斯误差分 布曲线”。 所以偶然误差 具有正态分布 的特性。
•对于一组不同精度的观测值l i ,一
次观测的中误差为mi ,设某次观测
的中误差为m,其权为P0,选定λ= m2,则有:
P0
m2 m2
1
•数值等于1的权,称为单位权;权
等于1的中误差称为单位权中误差, 常用μ表示。对于中误差为mi的观 测值,其权为:
Pi
2
mi2
•相应中误差的另一表示方法为:
mi
(2) f1x1(2) f2x2(2) fnxn(2)
(d)
有k个式
(k) f1x1(k) f2x2(k) fnxn(k)
对(d)式中的一个式子取平方:(i,j=1~n且i≠j)
2
f12x12
f
2 2
x22
f
2 n
xn2
2 f1 f2x1x2
2 f1 f3x1x3 2 fi f jxix j
对(a)全微分:
dZ
F x1
第五章 测量误差的基本知识
第七章测量误差基本知识内容:了解测量误差来源及产生的原因;掌握系统误差和偶然误差的特点及其处理方法;理解精度评定的指标(中误差、相对误差、容许误差)的概念;了解误差传播定律的应用。
重点:系统误差和偶然误差的特点及其处理方法。
难点:中误差、相对误差、容许误差的概念;误差传播定律的应用。
§ 5.1 测量误差的概念测量误差按其对测量结果影响的性质,可分为系统误差和偶然误差。
一、系统误差 (system error)1、定义:在相同观测条件下,对某量进行一系列观测,如误差出现符号和大小均相同或按一定的规律变化,这种误差称为系统误差。
2、特点:具有积累性,对测量结果的影响大,但可通过一般的改正或用一定的观测方法加以消除。
二、偶然误差 (accident error)1、定义:在相同观测条件下,对某量进行一系列观测,如误差出现符号和大小均不一定,这种误差称为偶然误差。
但具有一定的统计规律。
2、特点:(1)具有一定的范围。
(2)绝对值小的误差出现概率大。
(3)绝对值相等的正、负误差出现的概率相同。
(4)数学期限望等于零。
即:误差概率分布曲线呈正态分布,偶然误差要通过的一定的数学方法(测量平差)来处理。
此外,在测量工作中还要注意避免粗差 (gross error) (即:错误)的出现。
偶然误差分布频率直方图§ 5.2 衡量精度的指标测量上常见的精度指标有:中误差、相对误差、极限误差。
一、中误差方差:——某量的真误差, [] ——求和符号。
规律:标准差估值(中误差 m )绝对值愈小,观测精度愈高。
在测量中,n为有限值,计算中误差 m 的方法,有:1、用真误差( true error )来确定中误差——适用于观测量真值已知时。
真误差Δ——观测值与其真值之差,有:标准差中误差(标准差估值), n 为观测值个数。
[ 例题 ] :对 10 个三角形的内角进行了观测,根据观测值中的偶然误差(三角形的角度闭合差,即真误差),计算其中误差。
测量误差的基本知识

m乙 =
=
= 4.3
n
6
12
二、相对误差
l 绝对误差 :真误差、中误差 l 相对误差: 在某些测量工作中,绝对误差不能完全
反映出观测的质量。 相对误差K—— 等于误差的绝对值与相应观测值的
比值。常用分子为1的分式表示,即:
相对误差
=
误差的绝对值 观测值
=1 T
13
l 相对中误差:当误差的绝对值为中误差m 的绝对值时, K称为~,即 k=1/m 。
3
1.系统误差
l 系统误差:在相同的观测条件下,对某一未知量进行一系列 观测,若误差的大小和符号保持不变,或按照一定的规律变 化,这种误差称为~ 。
l 系统误差产生的原因 : 仪器工具上的某些缺陷;观测者的 某些习惯的影响;外界环境的影响。
l 系统误差的特点: 具有累积性
4
系统误差消减方法 ❖1、在观测方法和观测程序上采取一定的措施;
中误差、相对误差、极限误差和容许误差
10
一、中误差
在测量实践中观测次数不可能无限多,实际应用中,以 有限次观测个数n计算出标准差的估值定义为中误差m,作 为衡量精度的一种标准:
m = ±sˆ = ± [ ]
n
在测量工作中,普遍采用中误差来评定测量成果的精度。
11
l 有甲、乙两组各自用相同的条件观测了六个三角 形的内角,得三角形的闭合差(即三角形内角和 的真误差)分别为:
例:经纬仪的LL不垂直于VV对测角的影响
5
2.偶然误差 l 偶然误差:在相同的观测条件下,对某一未知量 进行一系列观测,如果观测误差的大小和符号没有 明显的规律性,即从表面上看,误差的大小和符号 均呈现偶然性,这种误差称为 ~。 l 产生偶然误差的原因: 主要是由于仪器或人的感 觉器官能力的限制,如观测者的估读误差、照准误 差等,以及环境中不能控制的因素(如不断变化着的 温度、风力等外界环境)所造成。
第6章 测量误差基本知识

水准仪:
经纬仪:
⑵采用对称观测的方法 大小相等、符号相反的系统误差,相互抵消 水准测量:前、后视距大致相等 角度测量:盘左、盘右取平均值
⑶测定系统误差的大小,对观测值加以改正 钢尺量距:尺长改正、温度改正、倾斜改正
3)偶然误差 偶然误差:在一定观测条件下的一系列观测值中,其误差大小、 正负号不定,但符合一定统计规律的测量误差。 也称随机误差 偶然误差反映观测结果的精密度。 精密度:在一定观测条件下,一组观测值与其数学期望值接近 或离散的程度,也称内部符合精度。 如:对中误差、瞄准误差、估读误差等
设Z为独立变量 x1,x2, … ,xn的函数,即
Z=f x1,x2, xn
2
2
mZ =
f
x1
m12
f x2
m22
f xn
2
mn2
例1:
在1:500的地形图上量得A、B两点间的距离d=234.5mm,中误差 md=±0.2mm。求A、B两点间的实地水平距离D及其中误差mD。
h值越小,曲线两侧坡度越缓, 小误差出现的概率小,精度越低
2.中误差
与精度指数成反比
m n
式中:[△△]——偶然误差平方和 n——偶然误差个数
3.极限误差 由偶然误差的特性“误差绝对值不会超过一定限值”(有界性)
这个限值就是极限误差。
P m 0.683 68.3%
31.7%
P 2m 0.954 95.4% 4.6%
K
D往 D返
D
=
=
1
=1
1
2
D往 +D返
D平均
D平均 D
M
5.相对中误差
观测值中误差与相应观测值之比。
测量学之测量误差基本知识

所谓精度,就是指误差分布的密集或离散的程度,为了衡量 观测值的精度高低,可以用误差分布表、绘制直方图或画出误 差分布曲线的方法进行比较。 衡量精度的标准有以下几种:
中误差 允许误差(极限误差) 相对误差
m 21 22 2n
n
n
例 :对某一距离进行五次丈量,其真误差分别为-6mm 、-5mm、-2mm、+1mm、+6mm,求观测值中误差。 根据上式可知
2. 观测值的和或差函数
函数 Z=x±y 的中误差:
mz2 mx2 my2
或mz
mx2
m
2 y
例2 在三角ABC中,观测了∠A和∠B,其中误差 分别为 mA 6" , mB 8" ,求∠C的中误差?
解: ∵C=180-(A+B) ∴
mc mA2 mB2 62 82 10
2
3
4
5
);
m x2
m 5
3、结论:
Pi mi2 ; (i = 1,2, ……n)
式中:P为权,是任意常数。
水准测量与距离丈量中,各路线的权与该路线的测站数
或距离的公里数成反比。
即
1 pi Ni
或
1 pi Si
同精度观测值的算术平均值的权与观测次数成正比。 即
Pi=Ni
设对某量进行n次观测,其观测值中误差及权分别为: 观测值 l1 , l2 …… ln 中误差 m1, m2 …… mn 权 p1 ,p2 …… pn
则加权平均值为:
x加 p1l1 p2l2 pnln [ pl]
p1 p2 pn
测量误差的基本知识

小结
• 正确列出函数式; • 检查观测值是否独立; • 求偏微分并代入观测值确定系数; • 套用公式求出中误差。 思考题:一个边长为l的正方形,若测量一边中误差为ml=±1cm,求周长
的中误差?若四边都测量,且测量精度相同,均为ml,则周长中误差是多 少?
§5.4等精度直接观测值
1.算术平均值原理 • 假设对某量X 进行了n次等精度的独立观测,得观测值l1,l2,…ln • 算术平均值为 :L=(l1+l2+…ln )/n=[l]/n • 算术平均值原理:当n→∞时,L=X • 证明:∆i=li-X, [∆]=[l]- nX,
mz
(
f x1
)
2
m12
( f x2
) 2 m22
... ( f xn
) 2 mn2
二、特殊函数的中误差
1、倍数函数:Z=kx
中误差:mz=kmx
2、和差函数 :Z=x1±x2±…±xn
中误差:
3、线形函数 : Z=k1x1±k2x2±…±knxn
中误差:
mz m12 m22 ... mn2
此在测量工作中,我们常常取三倍中误差作为偶然误差的容许值(或限差),如果精 度要求较高时,就可以取两倍中误差作为限差,即:
∆容=士 2|m| 或 ∆容=士3|m |
§5.3 误差传播定律
• 误差传播定律:是指描述观测值中误差与其函数中误差之间关系的定律 一、一般函数的中误差
设Z=f(x1,x2,…,xn),其中x1,x2,…,xn属于独立自变量(如直接观测值),他们的 中误差分别为m1,m2,…,mn则函数Z的中误差为 :
• 所以甲组精度高 关于中误差要注意两点 • 中误差(m)与真误差( ∆ )不同,它只是表示某一组
第2章 测量误差基本知识
L l1 l2 l12 360 .000 m mL ml 12 17 .3mm mL 1 L 21000
(二)解:依题意,则
L 12 l 360 .000 m mL 12 ml 60 .0mm mL 1 L 6000
1 2 3 4 5 6 7 8 9 Σ
125.77 125.74 125.72 125.78 125.75 125.73 125.71 125.79 125.76 1131.75
-2 +1 +3 -3 0 +2 +4 -4 -1 0
4 1 9 9 0 4 16 16 1 60
[例]如图,为求未知点F的高程,由已知点A、B、C、 D和E向F布设五条水准路线,构成具有一个节点的水准 网。各已知点高程、各水准路线长度及高差观测值列 于表中,试求算: 1.未知点F的高程最或然值HF及其中误差mF; 2.每公里水准路线高差测定的中误差m公里; 3.各条水准路线的高差观测值的中误差m1、m2、m3、 m4、m5 。 B
p
i
cN i
距离测量中,当单位距离测量的中误差相同时,各
段距离观测值的权与其长度s成反比
c pi s i
三、单位权中误差
其值恰为1的权称为单位权,此时,pi=1. mi= 与之对应的观测值、精度值和中误差分别称为单位 权观测值L,单位权精度和单位权中误差。 设对某量进行n次不等精度观测,观测值为:L1, L2,…,Ln (权为:p1,p2,…,pn),则
piδHi (mm) +16.0 -7.5 -16.0 +140.0 +60.0
vi (mm) +1 +8 +13 -2 -1
《测量学》第五章测量误差基本知识

系统误差的来源与消除方法
总结词
系统误差的来源主要包括测量设备误差、环境因素误差和测量方法误差。消除系统误差的方法包括校准设备、改 进测量方法和采用适当的修正公式。
详细描述
系统误差的来源多种多样,其中最常见的是测量设备误差,如仪器的刻度不准确、零点漂移等。此外,环境因素 如温度、湿度和气压的变化也可能导致系统误差。为了消除这些误差,可以采用定期校准设备、选择适当的测量 方法和采用修正公式等方法。
相对测量法
通过比较被测量与标准量之间 的差异来得到被测量的值,并 评估误差。
组合测量法
将被测量与其他已知量进行组 合,通过测量组合量来得到被
测量的值,并评估误差。
测量结果的表示与处理
测量结果的表示
测量结果应包括被测量的值、单位、 测量不确定度以及置信区间等。
异常值的处理
在数据处理过程中,如果发现异常值, 应进行识别、判断和处理,以确保测 量结果的准确性和可靠性。
测量学第五章 测量误差 基本知识
contents
目录
• 测量误差概述 • 系统误差 • 随机误差 • 粗大误差 • 测量误差的估计与处理
测量误差概述
01
测量误差的定义
测量误差
在测量过程中,由于受到测量仪器、 环境条件、操作者技能等因素的影响 ,使得测量结果与被测量的真实值之 间存在一定的差异。
不确定度的评定方法
不确定度的传递
不确定度的评定方法包括A类评定和B类评 定,其中A类评定基于统计分析,B类评定 基于经验和信息。
在多个量之间存在函数关系时,需要将各 个量的不确定度传递到最终的测量结果中 ,以确保最终结果的准确性和可靠性。
THANKS.
数据修约
根据测量不确定度对数据进行修约, 以确保数据的完整性和一致性。
第八单元 测量误差基本知识

1 2 n lim lim 0 n n n n
特性(1)、(2)、(3)决定了特性(4),特性(4)具有实用意义。
四、衡量观测值精度的指标
1.中误差(方差与标准差)
由正态分布密度函数
y
2 2
x
式中
1 e 2
x a 2
偶然误差——误差出现的大小、符号各不相同,
表面看无规律性。
例:估读数、气泡居中判断、瞄准、对中等误差,
导致观测值产生误差 。
几个概念: ● 准确度 ● 精(密)度
● 最或是值
● 测量平差
偶然误差的统计规律
举例:在某测区,等精度观测了358个三角形的内
角之和,得到358个三角形闭合差i(偶然误 差,也即真误差) ,然后对三角形闭合差i 进行分析。 分析结果表明,当观测次数很多时,偶然 误差的出现,呈现出统计学上的规律性。而 且,观测次数越多,规律性越明显。
● 观测条件
● 等精度观测和不等精度观测 ● 直接观测和间接观测 ● 独立观测和非独立观测
三、测量误差的种类
系统误差 —— 误差出现的大小、符号相同,或按
规律性变化,具有积累性。 例: 误差 处理方法 钢尺尺长误差ld 计算改正 钢尺温度误差lt 计算改正 水准仪视准轴误差i 操作时抵消(前后视等距) 经纬仪视准轴误差C 操作时抵消(盘左盘右取平均) …… …… ● 系统误差可以消除或减弱。 (计算改正、观测方法、仪器检校)
测量中,一般取两倍中误差(2m)作为容许误差,也称为 限差: 容=±2m
3.相对误差(相对中误差)
用于表示距离的精度。
用分子为1的分数表示。 分数值较小相对精度较高;分数值较大相对精度较低。
第六章 测量误差基本知识

0 . 05 m
,并测得倾斜角
m 3 0 ,
15 0 0 0 0
,
4其中误差 m 3 0s ,求相应水平距离D及其中误差。05 m .丈量倾斜距离 50 . 00 m , 其中误差 m s 0 .
15 0 0 0 0 ,其中误差
设某未知量的观测值为: l1 , l2 , , ln 该量的算术平均值为:
x l1 l2 ln n [l ] n
则该量的改正数: v i
[l ] n
li x li
[VV ] n 1
m
经推算:观测值的中误差
m
n
证明两式根号内相 等
1 l1 X
m1 L1 1 ,
2
1
,
m1
2
10000
L2
2000 L1
L2
即前者的精度比后者高。 有时,求得真误差和容许误差后,也用相对误差来表示。例如,在 本书以后要介绍的导线测量中,假设起算数据没有误差时,求出的全 长相对闭合差也就是相对真误差;而规范中规定全长相对闭合差不能 超过1/2000或1/15000,它就是相对容许误差。
x
Z x1 x 2
m
2 x1
m
2 x2
Z k 1 x 1 k 2 x 2 ... k n x n k m
2 2 2 x2
2 2 k1 m x1
... k m
2 n
2 xn
例
丈量了斜距S=50.00m,其中误差 m s
并测得倾斜角 求相应水平距离 解: D s cos D s D cos cos 15
第六章 测量误差基本知识

i
偶然误差的特性:
1、有界性 2、趋向性 3、抵偿性
§6-2 评定精度的标准
一、精度 所谓精度,是指误差分布的集中与离散 程度,表示观测成果的精确程度。 二、中误差 真误差的平方的算术平均值的方根
m [] n
三、相对误差
k D D
K m L
四、极限误差
在实际观测中,大于2m出现的概率,大于3m 误差出现的概率‰,有限次观测,小概率出现的 机会很小,因而以2m或3m为极限误差。
2 2
, m2 , mn
2
得到和差函数的中误差: m
Z
m1 mz mn
例3:分段丈量一直线AC上的两段距离AB、BC,丈量结 果 AB=150.15m , BC=210.24m , 其 中 误 差 分 别 为 m AB 0.12m mCD 0.16m ,求AC全长及其中误差
设每个角度的测角中误差为 m ,则角度闭合差的中误 差为 m m n
如果以2倍的中误差为极限误差,则允许的n边多边形 的角度闭合差为:
2m n
例1:设水平角的测角中误差 m 18" ,则三角形的角 度闭合差的限差应为: 2m n 2 18" 3 60"
三、水准测量的精度
(一)水准仪两次测定高差的限差
假设我们用DS3水准仪进行了一段普通水准测量,求一 次测定的高差中误差和两次测定高差之差的中误差。 (1)设用DS3级水准仪前视或后视在水准尺上的读数中误 差: m 1mm 则一次测定高差的中误差为: h m 2 1.4mm m (2)两次测定高差之差的计算式为 h h 差的中误差为: m m 2 2mm
2 2 2 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二 测量误差的分类
(2)偶然误差 在一定的观测条件下, (2)偶然误差——在一定的观测条件下,对某量进行一系列观 偶然误差 在一定的观测条件下 测时,符号和大小均不一定,这种误差称为偶然误差。 测时,符号和大小均不一定,这种误差称为偶然误差。 不固定的和 产生偶然误差的原因往往是不固定的 难以控制的 产生偶然误差的原因往往是不固定的和难以控制的。 系统误差能够加以改正,而偶然误差是不可避免的,并且是消 系统误差能够加以改正, 偶然误差是不可避免的 能够加以改正 除不了的。 除不了的。 从单个偶然误差来看, 从单个偶然误差来看,其出现的符号和大小没有一定的规律性 但对大量的偶然误差进行大量统计分析,就能发现规律性, ,但对大量的偶然误差进行大量统计分析,就能发现规律性,并且 误差个数越多,规律性越明显。 误差个数越多,规律性越明显。
(3)容许误差(限差) )容许误差(限差) 在一定条件下,偶然误差绝对值不应超过的限值称 称 容许误差, 为容许误差,也称为限差或极限误差 在实际应用的测量规范中,常以 倍 在实际应用的测量规范中,常以2倍或3倍中误差作为 倍 偶然误差的容许值, 偶然误差的容许值,即 ∆容=2σ≈2m ∆容=3σ≈3m 或 如果观测值中出现了大于容许误差的偶然误差, 如果观测值中出现了大于容许误差的偶然误差,则认 为该观测值不可靠,应舍去不用,并重测。 为该观测值不可靠,应舍去不用,并重测。
三 偶然误差的特性
该组误差的分布表现出如下规律: 该组误差的分布表现出如下规律:小误差比大误差出现的 频率高,绝对值相等的正、负误差出现的个数和频率相近, 频率高,绝对值相等的正、负误差出现的个数和频率相近,最 大误差不超过24″。 大误差不超过 。 以误差大小为 横坐标, 横坐标,以频率 k/n与区间 的比 与区间d∆的比 与区间 值为纵坐标, 值为纵坐标,绘制 成频率直方图
由上式可知,当观测次数 无限增大时 无限增大时, 由上式可知,当观测次数n无限增大时,算 术平均值趋近于真值。但在实际测量工作中, 术平均值趋近于真值。但在实际测量工作中, 观测次数总是有限的,因此, 观测次数总是有限的,因此,算术平均值较观 测值更接近于真值。我们将最接近于真值的算 测值更接近于真值。我们将最接近于真值的算 术平均值称为最或然值或最可靠值。 术平均值称为最或然值或最可靠值。
三 偶然误差的特性
几个概念
在测量工作中, 角度和高差等,称为观测 在测量工作中,观测的对象如长度 角度和高差等,称为观测 量。 任一个观测量,客观上存在着一个能代表其真正大小的数值, 任一个观测量,客观上存在着一个能代表其真正大小的数值, 称为该量的“真值” 称为该量的“真值”。 测量所获得的数值称为观测值。 测量所获得的数值称为观测值。 观测值 进行多次测量时,观测值之间往往存在差异。 进行多次测量时,观测值之间往往存在差异。这种差异实质上 表现为观测值与其真实值 简称为真值 之间的差异, 观测值与其真实值( 真值) 表现为观测值与其真实值(简称为真值)之间的差异,这种差异称为 真误差,简称误差。 真误差,简称误差。 Δi=Li-X 式中Δ 就是观测误差, 真误差,简称误差。 式中Δi就是观测误差,通常称为 真误差,简称误差。
二 测量误差的分类
根据性质不同, 根据性质不同,观测误差可分为系统误差和偶然误差 两类。 两类。 (1)系统误差——在一定的观测条件下进行一系列 系统误差 在一定的观测条件下进行一系列 观测时,符号和大小保持不变或按一定规律变化的误差, 观测时,符号和大小保持不变或按一定规律变化的误差, 称为系统误差。 称为系统误差。 系统误差具有积累性,对测量结果影响很大。 系统误差具有积累性,对测量结果影响很大。
设观测量的真值为X,观测值为 设观测量的真值为 ,观测值为li(i=1,2,3……n), , 则观测值的真误差为: 则观测值的真误差为:
∆ 1 = l1 − X ∆ 2 = l2 − X ⋯⋯ ∆ n = ln − X
将各式两边相加,并除以 , 将各式两边相加,并除以n,得
可以设想,当误差个数 可以设想,当误差个数n→∞,同时又无限缩小误差区间 ,各 ,同时又无限缩小误差区间d∆, 矩形的顶边折线就成为一条光滑的曲线。该曲线称为误差分布曲线 误差分布曲线。 矩形的顶边折线就成为一条光滑的曲线。该曲线称为误差分布曲线。 其函数式为: 其函数式为:
− 2 1 y = f (∆) = e 2σ 2πσ ∆2
(4)相对误差 )
中误差是绝对误差。在距离丈量中, 中误差是绝对误差。在距离丈量中,中误差不能准确地反映出 观测值的精度。例如丈量两段距离, = 观测值的精度。例如丈量两段距离,D1=100m,m1= , = ±1cm和D2=300m,m2=±1cm,虽然两者中误差相等, 和 = , = ,虽然两者中误差相等, m1=m2,显然,不能认为这两段距离丈量精度是相同的,这 = ,显然,不能认为这两段距离丈量精度是相同的, 时应采用相对中误差K来作为衡量精度的标准 来作为衡量精度的标准。 时应采用相对中误差 来作为衡量精度的标准。
相对误差K是误差 的绝对值与观测值 大小的比值: 相对误差 是误差m的绝对值与观测值 大小的比值: 是误差 的绝对值与观测值D大小的比值
|m| 1 K= = D D |m|
上式中当m为中误差时, 称为相对中误差。 称为相对中误差 上式中当 为中误差时,K称为相对中误差。 为中误差时 上面例相对误差为: K1=1/10000; k2=1/3000
二 测量误差的分类
在测量工作中,应尽量设法消除和减小系统误差。 在测量工作中,应尽量设法消除和减小系统误差。方 法有: 法有: 在观测方法和观测程度上采用必要的措施, ①在观测方法和观测程度上采用必要的措施,限制或 削弱系统误差的影响。 削弱系统误差的影响。 ②找出产生系统误差的原因和规律,对观测值进行系 找出产生系统误差的原因和规律, 统误差的改正。 统误差的改正。 ③将系统误差限制在允许范围内。 将系统误差限制在允许范围内。
两组观测值的中误差为: 解 1、2两组观测值的中误差为: 、 两组观测值的中误差为 m1=±3.0″ ± m2=±3.5″ ±
比较m 可知, 组的观测精度比 组高。 组的观测精度比2组高 比较 1和m2可知,1组的观测精度比 组高。中误差所代 表的是某一组观测值的精度,而不是这组观测中某一次 表的是某一组观测值的精度, 的观测精度。 的观测精度。
2 平均误差 在相同的观测条件下,一组独立的真误差为△1、 △2 △3、………… △n 那么平均误差为
∆ θ = lim n →∞ n
当观测次数有限时 计算例5-1的平均误差 计算例 的平均误差
∆ θ =± n
θ1=±2.6″ ±
θ2=±2.6″ ±
我国一般采用中误差作为评判精度的指标
1 = e 2πσ
∆2 − 2 2σ
三 偶然误差的特性
统计大量的实验结果,表明偶然误差具有如下特性: 统计大量的实验结果,表明偶然误差具有如下特性: 特性1 在一定观测条件下的有限个观测中, 特性 在一定观测条件下的有限个观测中,偶然误差的绝对值 范围) 不超过一定的限值。 范围 不超过一定的限值。(范围 特性2 绝对值较小的误差出现的频率大,绝对值较大的误差出 特性 绝对值较小的误差出现的频率大, 现的频率小。 绝对值大小 绝对值大小) 现的频率小。(绝对值大小 特性3 绝对值相等的正、负误差出现的频率大致相等。 符号 符号) 特性 绝对值相等的正、负误差出现的频率大致相等。(符号 特性4 当观测次数无限增多时,偶然误差平均值的极限为0, 特性 当观测次数无限增多时,偶然误差平均值的极限为 , 抵偿性) 即(抵偿性 抵偿性 ∆1 +∆ 2 +L ∆ n [∆]
[∆∆] m = lim n →∞ n
2
[∆]2 m=± n
[∆∆ ]
——真误差的平方和, [∆∆ ] = ∆2 + ∆2 + ⋯ + ∆2 真误差的平方和, 真误差的平方和 1 2 n
1 中误差(标准差) 中误差(标准差)
设有1 两组观测值,各组均为等精度观测, 例5-1 设有1、2两组观测值,各组均为等精度观测,它们的 真误差分别为: 真误差分别为: 甲组:+4″, 2″,0″, 4″,+3″; 甲组:+4″,-2″,0″,-4″,+3″; 乙组:+6″, 5″,0″,+1″, 1″; 乙组:+6″,-5″,0″,+1″,-1″; 试计算1 两组各自的观测精度。 试计算1、2两组各自的观测精度。
lim
n →∞
n
= lim
n →∞
n
=0
5-2 衡量精度的指标
• 一 精度 • 精度:是指对某一个量的多次观测中,误差分布 精度:是指对某一个量的多次观测中, 密集或离散程度 程度。 的密集或离散程度。 •在相同观测条件下, 在相同观测条件下, 在相同观测条件下 对某一量所进行的 一组观测, 一组观测,虽然它 们的真实误差不相 等,但都对应于同 一误差分布, 一误差分布,故这 些观测值误差是相 等的。 等的。
[∆ ] [l ] = −X n n
式代入上式, 将(1)式代入上式,并移项,得 式代入上式 并移项,
[∆ ] L=X +
n
根据偶然误差的特性,当观测次数 无限增大时 无限增大时, 根据偶然误差的特性,当观测次数n无限增大时,则有
n→∞
lim
[∆ ] = 0
n
那么同时可得
n→ ∞
lim L = X
三 偶然误差的特性
例如某一测区在相同观测条件下观测了358个三角形的全部内角 个三角形的全部内角 例如某一测区在相同观测条件下观测了 由于观测值含有偶然误差, 。由于观测值含有偶然误差,故平面三角形内角之和不一定等 于真值180 于真值
误差区间 dΔ 0″~3″ 3″~6″ 6″~9″ 9″~12″ 12″~15″ 18″~21″ 21″~24″ >24″ ∑ 负误差 个数 k 45 40 33 23 17 13 6 4 0 181 频率 k/n 0.126 0.112 0.092 0.064 0.047 0.036 0.017 0.011 0 0.505 正误差 个数 k 46 41 33 21 16 13 5 2 0 177 频率 k/n 0.128 0.115 0.092 0.059 0.045 0.036 0.014 0.006 0 0.495 个数 k 91 81 66 44 33 26 11 6 0 358 合计 频率 k/n 0.254 0.227 0.184 0.123 0.092 0.072 0.031 0.017 0 1.00