QD75电子齿轮比与每转脉冲数详细解析
QD75全参数设置说明书
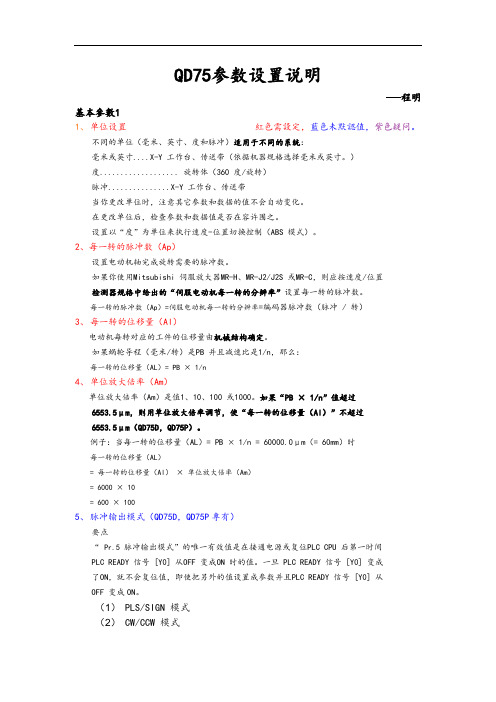
QD75参数设置说明---程明基本參數11、单位设置紅色需設定,藍色未默認值,紫色疑问。
不同的单位(毫米、英寸、度和脉冲)适用于不同的系统:毫米或英寸....X-Y 工作台、传送带(依据机器规格选择毫米或英寸。
)度................... 旋转体(360 度/旋转)脉冲...............X-Y 工作台、传送带当你更改单位时,注意其它参数和数据的值不会自动变化。
在更改单位后,检查参数和数据值是否在容许围之。
设置以“度”为单位来执行速度-位置切换控制(ABS 模式)。
2、每一转的脉冲数(Ap)设置电动机轴完成旋转需要的脉冲数。
如果你使用Mitsubishi 伺服放大器MR-H、MR-J2/J2S 或MR-C,则应按速度/位置检测器规格中给出的“伺服电动机每一转的分辨率”设置每一转的脉冲数。
每一转的脉冲数(Ap)=伺服电动机每一转的分辨率=编码器脉冲数(脉冲 / 转)3、每一转的位移量(Al)电动机每转对应的工件的位移量由机械结构确定。
如果蜗轮导程(毫米/转)是PB 并且减速比是1/n,那么:每一转的位移量(AL)= PB × 1/n4、单位放大倍率(Am)单位放大倍率(Am)是值1、10、100 或1000。
如果“PB × 1/n”值超过6553.5μm,则用单位放大倍率调节,使“每一转的位移量(Al)”不超过6553.5μm(QD75D,QD75P)。
例子:当每一转的位移量(AL)= PB ×1/n = 60000.0μm(= 60mm)时每一转的位移量(AL)= 每一转的位移量(Al)×单位放大倍率(Am)= 6000 × 10= 600 × 1005、脉冲输出模式(QD75D,QD75P專有)要点“Pr.5 脉冲输出模式”的唯一有效值是在接通电源或复位PLC CPU 后第一时间PLC READY 信号 [Y0] 从OFF 变成ON 时的值。
QD75电子齿轮比与每转脉冲数详细解析
一、三菱QD定位模块几个参数 三菱QD定位模块都要设置这些参数。有四个相关的参数,分别是单位设置、每转 脉冲数、每转移动量、单位倍率。 1 单位设置 这个参数设置的是定位控制时的指令单位,可以设置为mm、inch、degree、pulse。 如果设置为脉冲单位pulse,那么我们在发定位指令时就是以脉冲为单位了,这时 我们就该关心程序里应该发多少脉冲了。如果设置为毫米mm,那么我们发定位 指令时就可以直接让控制对象(比如丝杠)走多少距离,而不需要考虑程序里应 该发多少脉冲。 2 每转脉冲数 这个参数设置的是电机轴每转所需要的脉冲数。
设置电子齿轮比和脉冲当量方法
1、先设脉冲当量 脉冲当量 = 导程/(减速比*伺服电机每转一周的驱动器脉冲数) 2、算出伺服侧电子齿轮比 CMX / CDV = 三角L0 * Pt / 三角S = 符合电子齿轮比的范围。 三角L0 * Pt / (n * Pb)
3、校验PLC定位模块在最大脉冲数时,马达的转数是否等于或者低于额定转数。 如果马达转数没问题,不需要控制PLC的最大脉冲数。否则需要控制PLC最大脉冲 数。
FX3U本体输出点控制马达例子
已知:滑台导程12mm,马达编码器的分辨率是20480脉冲/ r,控制器可以接收 线性差分信号500kpps以下;还可以接收开路集电极信号100kpps以下。马达 额定转速3000 r / min,机械特性Pb / Pt = 12 / 20480 = 0.0005859mm, 滑台重复定位精度+/- 0.02mm,用FX3GA本体的点位发脉冲控制马达。马达和滑 台用联轴器连接,没有减速机。(FX3GA , 集电极开路100kpps脉冲。)
三角L0 * Pt / (n * Pb) = 128 / 15 = 8.533
QD75电子齿轮比与每转脉冲数详细解析
电子齿轮 = 伺服侧电子齿轮比 * 每转脉冲数 /(每转移动量*单位倍率) 把参数代入公式:电子齿轮 = (4 / 1)* (32768/ 20)= 32768 / 5 (每转移动量要换算成mm) 由于机构的机械特性Pb / Pt = 20 / 131072 = 0.0001525mm, 以上设置得出脉冲当量是0.00061mm,大于机械特性0.0001525mm。设置是正确的。 方法二: JE马达编码器分辨率是131072,没有减速机,丝杠螺距20mm;设置的参数是: QD75设置:每转脉冲数设置为1pulse,每转移动量设置为10um,单位倍率为1倍; 伺服放大器侧电子齿轮比设置为8192/125=65.536 那么根据脉冲当量 = 导程/(减速比 * 伺服电机每转一圈的脉冲数。) 算出伺服电机每转一圈的脉冲数 = 20 / 0.01= 2000, 对于导程是20mm的螺杆,定位模块每转发2000的脉冲,对于QD75定位来说发脉 冲太少了,再用驱动器的电子齿轮来放大脉冲,定位时加减速冲击较大,设备容 易晃动,使用了S型曲线加减速功能也没有效果。所以不推荐使用这种设置。 MR-JE电子齿轮A/B倍 A = 1 ~ 16777215、B = 1 ~ 16777215、1/10 < A/B < 4000, 我们用QD75定位模块来进行定位时,尽量让QD75每转发送脉冲数多一些,伺服 侧电子齿轮A/B值小一些。总线式的伺服都抛弃了电子齿轮比概念了。
ቤተ መጻሕፍቲ ባይዱ
三角L0 * Pt / (n * Pb) = 256 / 15 = 17.066
No = 100000*(256 / 15)*60 / 20480 = 5000 r/min 说明当脉冲当量选0.01mm时,伺服侧电子齿轮比 256 / 15 ,当PLC的最高脉冲 100 000pps,马达的速度是5000 r/min,速度已经超出了3000 r /min,要使用这 样的配置,必须限制PLC的最高脉冲数,限制为50 kpps.马达的转速为2500 r/min.
QD75参数设置说明

QD75参数设置说明---程明基本參數11、单位设置紅色需設定,藍色未默認值,紫色疑问。
不同的单位(毫米、英寸、度和脉冲)适用于不同的系统:毫米或英寸....X-Y 工作台、传送带(依据机器规格选择毫米或英寸。
)度................... 旋转体(360 度/旋转)脉冲...............X-Y 工作台、传送带当你更改单位时,注意其它参数和数据的值不会自动变化。
在更改单位后,检查参数和数据值是否在容许范围之内。
设置以“度”为单位来执行速度-位置切换控制(ABS 模式)。
2、每一转的脉冲数(Ap)设置电动机轴完成旋转需要的脉冲数。
如果你使用Mitsubishi 伺服放大器MR-H、MR-J2/J2S 或MR-C,则应按速度/位置检测器规格中给出的“伺服电动机每一转的分辨率”设置每一转的脉冲数。
每一转的脉冲数(Ap)=伺服电动机每一转的分辨率=编码器脉冲数(脉冲 / 转)3、每一转的位移量(Al)电动机每转对应的工件的位移量由机械结构确定。
如果蜗轮导程(毫米/转)是PB 并且减速比是1/n,那么:每一转的位移量(AL)= PB × 1/n4、单位放大倍率(Am)单位放大倍率(Am)是值1、10、100 或1000。
如果“PB × 1/n”值超过μm,则用单位放大倍率调节,使“每一转的位移量(Al)”不超过μm(QD75D,QD75P)。
例子:当每一转的位移量(AL)= PB × 1/n = μm(= 60mm)时每一转的位移量(AL)= 每一转的位移量(Al)×单位放大倍率(Am)= 6000 × 10= 600 × 1005、脉冲输出模式(QD75D,QD75P專有)要点“脉冲输出模式”的唯一有效值是在接通电源或复位PLC CPU 后第一时间PLC READY 信号 [Y0] 从OFF 变成ON 时的值。
一旦 PLC READY 信号 [Y0] 变成了ON,就不会复位值,即使把另外的值设置成参数并且PLC READY 信号 [Y0] 从OFF 变成ON。
QD75参数设置说明

QD75参数设置说明---程明基本參數11、单位设置紅色需設定,藍色未默認值,紫色疑问。
不同的单位(毫米、英寸、度和脉冲)适用于不同的系统:毫米或英寸....X-Y 工作台、传送带(依据机器规格选择毫米或英寸。
)度................... 旋转体(360 度/旋转)脉冲...............X-Y 工作台、传送带当你更改单位时,注意其它参数和数据的值不会自动变化。
在更改单位后,检查参数和数据值是否在容许范围之内。
设置以“度”为单位来执行速度-位置切换控制(ABS 模式)。
2、每一转的脉冲数(Ap)设置电动机轴完成旋转需要的脉冲数。
如果你使用Mitsubishi 伺服放大器MR-H、MR-J2/J2S 或MR-C,则应按速度/位置检测器规格中给出的“伺服电动机每一转的分辨率”设置每一转的脉冲数。
每一转的脉冲数(Ap)=伺服电动机每一转的分辨率=编码器脉冲数(脉冲/ 转)3、每一转的位移量(Al)电动机每转对应的工件的位移量由机械结构确定。
如果蜗轮导程(毫米/转)是PB 并且减速比是1/n,那么:每一转的位移量(AL)= PB ×1/n4、单位放大倍率(Am)单位放大倍率(Am)是值1、10、100 或1000。
如果“PB ×1/n”值超过6553.5μm,则用单位放大倍率调节,使“每一转的位移量(Al)”不超过6553.5μm(QD75D,QD75P)。
例子:当每一转的位移量(AL)= PB ×1/n = 60000.0μm(= 60mm)时每一转的位移量(AL)= 每一转的位移量(Al)×单位放大倍率(Am)= 6000 ×10= 600 ×1005、脉冲输出模式(QD75D,QD75P專有)要点“Pr.5 脉冲输出模式”的唯一有效值是在接通电源或复位PLC CPU 后第一时间PLC READY 信号[Y0] 从OFF 变成ON 时的值。
电子齿轮比与脉冲当量应用换算

电子齿轮比与脉冲当量应用换算一、科普一下这几个参数在定位参数的基本参数里,有四个相关的参数,分别是单位设置、每转脉冲数、每转移动量、单位倍率。
1.单位设置这个参数设置的是定位控制时的指令单位,可以设置为mm、inch、degree、pulse。
如果设置为脉冲单位pulse,那么我们在发定位指令时就是以脉冲为单位了,这时我们就该关心程序里应该发多少脉冲了。
如果设置为毫米mm,那么我们发定位指令时就可以直接让控制对象(比如丝杠)走多少距离,而不需要也不应该操心程序里应该发多少脉冲。
2.每转脉冲数这个参数设置的是电机轴每转所需要的脉冲数。
3.每转移动量这个参数设置的是当伺服电机转动一转时,控制对象(比如丝杠)走多少距离。
举个例子,丝杠的螺距是2mm,伺服电机直接带动丝杠,没有减速机,那么伺服电机转动一转时,丝杠移动量2mm,所以这里应该设置为2000um(前述提到的“单位设置”应设置为mm)4.单位倍率这个参数是当每转移动量超出设置范围时可以作出的调整。
在使用QD75等定位模块时,会发现,每转脉冲数的设置范围是0-65535,每转移动量则与单位有关,若单位是pulse,则范围是1-65535pulse;若单位是mm,这范围是0.1-6553.5um。
显然,第一,如果用的是JE伺服,那么每转脉冲数要设置为131072啊!第二,如果丝杠螺距超过7mm,每转移动量也无法设置。
在QD75里,如果每一脉冲的位移量小于1,则会发生命令频率变化。
较小的设置会增加变化并可能导致机器振动。
如果每一脉冲的位移量变为小于1,则也使用驱动装置的电子齿轮功能并进行设置使每一脉冲的位移量大于等于1。
这段话的意思是AL*AM / AP >=1.二、举个实际例子有一设备伺服轴,用的是MR-JE的马达,JE马达编码器分辨率是131072,丝杠螺距20mm;客户设置的参数是:QD75设置:每转脉冲数设置为1pulse,每转移动量设置为10um,单位倍率为1倍;伺服放大器侧电子齿轮比设置为8192/125;Pb:丝杆导程 n:减速比 Pt:电机编码器分辨率(脉冲/转)三角L0:每脉冲对应的进给量(mm/脉冲)三角S:电机每转对应的进给量(mm/r)CMX / CDV = 三角L0* Pt / 三角S = 三角L0* Pt / (n*Pb)CMX / CDV = (0.01*131072) / 20 = 8192 / 125QD75每转脉冲数设置AP为1pulse,每转移动量设置AL为10um,单位倍率AM为1倍,所以电机转一圈所需脉冲数为:脉冲当量= 导程/(减速比*伺服电机每转一周的定位模块脉冲数。
QD75参数设置说明

QD75参数设置说明---程明基本參數11、单位设置紅色需設定,藍色未默認值,紫色疑问。
不同的单位(毫米、英寸、度和脉冲)适用于不同的系统:毫米或英寸....X-Y 工作台、传送带(依据机器规格选择毫米或英寸。
)度................... 旋转体(360 度/旋转)脉冲...............X-Y 工作台、传送带当你更改单位时,注意其它参数和数据的值不会自动变化。
在更改单位后,检查参数和数据值是否在容许范围之内。
设置以“度”为单位来执行速度-位置切换控制(ABS 模式)。
2、每一转的脉冲数(Ap)设置电动机轴完成旋转需要的脉冲数。
如果你使用Mitsubishi 伺服放大器MR-H、MR-J2/J2S 或MR-C,则应按速度/位置检测器规格中给出的“伺服电动机每一转的分辨率”设置每一转的脉冲数。
每一转的脉冲数(Ap)=伺服电动机每一转的分辨率=编码器脉冲数(脉冲/ 转)3、每一转的位移量(Al)电动机每转对应的工件的位移量由机械结构确定。
如果蜗轮导程(毫米/转)是PB 并且减速比是1/n,那么:每一转的位移量(AL)= PB ×1/n4、单位放大倍率(Am)单位放大倍率(Am)是值1、10、100 或1000。
如果“PB ×1/n”值超过6553.5μm,则用单位放大倍率调节,使“每一转的位移量(Al)”不超过6553.5μm(QD75D,QD75P)。
例子:当每一转的位移量(AL)= PB ×1/n = 60000.0μm(= 60mm)时每一转的位移量(AL)= 每一转的位移量(Al)×单位放大倍率(Am)= 6000 ×10= 600 ×1005、脉冲输出模式(QD75D,QD75P專有)要点“Pr.5 脉冲输出模式”的唯一有效值是在接通电源或复位PLC CPU 后第一时间PLC READY 信号[Y0] 从OFF 变成ON 时的值。
QD75参数设置说明

QD75参数设置说明---程明基本參數11、单位设置紅色需設定,藍色未默認值,紫色疑问。
不同的单位(毫米、英寸、度和脉冲)适用于不同的系统:毫米或英寸....X-Y 工作台、传送带(依据机器规格选择毫米或英寸。
)度................... 旋转体(360 度/旋转)脉冲...............X-Y 工作台、传送带当你更改单位时,注意其它参数和数据的值不会自动变化。
在更改单位后,检查参数和数据值是否在容许范围之内。
设置以“度”为单位来执行速度-位置切换控制(ABS 模式)。
2、每一转的脉冲数(Ap)设置电动机轴完成旋转需要的脉冲数。
如果你使用Mitsubishi 伺服放大器MR-H、MR-J2/J2S 或MR-C,则应按速度/位置检测器规格中给出的“伺服电动机每一转的分辨率”设置每一转的脉冲数。
每一转的脉冲数(Ap)=伺服电动机每一转的分辨率=编码器脉冲数(脉冲/ 转)3、每一转的位移量(Al)电动机每转对应的工件的位移量由机械结构确定。
如果蜗轮导程(毫米/转)是PB 并且减速比是1/n,那么:每一转的位移量(AL)= PB ×1/n4、单位放大倍率(Am)单位放大倍率(Am)是值1、10、100 或1000。
如果“PB ×1/n”值超过6553.5μm,则用单位放大倍率调节,使“每一转的位移量(Al)”不超过6553.5μm(QD75D,QD75P)。
例子:当每一转的位移量(AL)= PB ×1/n = 60000.0μm(= 60mm)时每一转的位移量(AL)= 每一转的位移量(Al)×单位放大倍率(Am)= 6000 ×10= 600 ×1005、脉冲输出模式(QD75D,QD75P專有)要点“Pr.5 脉冲输出模式”的唯一有效值是在接通电源或复位PLC CPU 后第一时间PLC READY 信号[Y0] 从OFF 变成ON 时的值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当然也可以在三菱JE伺服控制器端不设置电子齿轮分子分母,可以直接设置PA05 参数,每转脉冲数FBP。 如果不设伺服控制器的电子齿轮比,只设PA05参数,例PA05设为5000,那么伺服 控制接收5000个脉冲,马达转一圈。 脉冲当量:10 / 5000=0.002mm,验算马达最大转数,电机额定转数3000 r/ min。 每转脉冲数 = 最大脉冲输入数 * 1000 / (电机额定转数 / 60) 5000*50=250 000所以要限制最大脉冲数位250Kpps。 QD75里速度控制值时30000mm/min 如果设置PA05为10000,脉冲当量是0.001mm限制最大脉冲数位500Kpps。 QD75里速度控制值时30000mm/min
FX3U本体输出点控制马达例子
已知:滑台导程12mm,马达编码器的分辨率是20480脉冲/ r,控制器可以接收 线性差分信号500kpps以下;还可以接收开路集电极信号100kpps以下。马达 额定转速3000 r / min,机械特性Pb / Pt = 12 / 20480 = 0.0005859mm, 滑台重复定位精度+/- 0.02mm,用FX3GA本体的点位发脉冲控制马达。马达和滑 台用联轴器连接,没有减速机。(FX3GA , 集电极开路100kpps脉冲。)
电子齿轮 = 伺服侧电子齿轮比 * 每转脉冲数 /(每转移动量*单位倍率) 把参数代入公式:电子齿轮 = (4 / 1)* (32768/ 20)= 32768 / 5 (每转移动量要换算成mm) 由于机构的机械特性Pb / Pt = 20 / 131072 = 0.0001525mm, 以上设置得出脉冲当量是0.00061mm,大于机械特性0.0001525mm。设置是正确的。 方法二: JE马达编码器分辨率是131072,没有减速机,丝杠螺距20mm;设置的参数是: QD75设置:每转脉冲数设置为1pulse,每转移动量设置为10um,单位倍率为1倍; 伺服放大器侧电子齿轮比设置为8192/125=65.536 那么根据脉冲当量 = 导程/(减速比 * 伺服电机每转一圈的脉冲数。) 算出伺服电机每转一圈的脉冲数 = 20 / 0.01= 2000, 对于导程是20mm的螺杆,定位模块每转发2000的脉冲,对于QD75定位来说发脉 冲太少了,再用驱动器的电子齿轮来放大脉冲,定位时加减速冲击较大,设备容 易晃动,使用了S型曲线加减速功能也没有效果。所以不推荐使用这种设置。 MR-JE电子齿轮A/B倍 A = 1 ~ 16777215、B = 1 ~ 16777215、1/10 < A/B < 4000, 我们用QD75定位模块来进行定位时,尽量让QD75每转发送脉冲数多一些,伺服 侧电子齿轮A/B值小一些。总线式的伺服都抛弃了电子齿轮比概念了。
速度和指令脉冲频率: 伺服电机以指令脉冲和反馈脉冲相等时的速度运行。因此,指令脉冲频率和反馈 脉冲频率相等。参数设置CMX CDV的关系如下图所示。
伺服侧电子齿轮:CMX :8192 CDV:625
QD定位模块速度限制值设定
设定速度限制可以控制马达的 移动速度。马达转速不能超过 额定转速。
浅谈电子齿轮比和脉冲当量
一、三菱QD定位模块几个参数 三菱QD定位模块都要设置这些参数。有四个相关的参数,分别是单位设置、每转 脉冲数、每转移动量、单位倍率。 1 单位设置 这个参数设置的是定位控制时的指令单位,可以设置为mm、inch、degree、pulse。 如果设置为脉冲单位pulse,那么我们在发定位指令时就是以脉冲为单位了,这时 我们就该关心程序里应该发多少脉冲了。如果设置为毫米mm,那么我们发定位 指令时就可以直接让控制对象(比如丝杠)走多少距离,而不需要考虑程序里应 该发多少脉冲。 2 每转脉冲数 这个参数设置的是电机轴每转所需要的脉冲数。
二、举个实际例子 有一设备伺服轴,用的是MR-JE的马达,JE马达编码器分辨率是131072,没有减速 机,丝杠螺距20mm; 方法一设置的参数是:QD75设置:每转脉冲数设置为32768pulse,每转移动量设 置为2000um,单位倍率为10倍;伺服放大器侧电子齿轮比设置为4/1; Pb:丝杆导程 n:减速比 Pt:电机编码器分辨率(脉冲/转) 三角L0:每脉冲对应的进给量(mm/脉冲) 三角S:电机每转对应的进给量(mm/r) CMX / CDV = 三角L0* Pt / 三角S = 三角L0* Pt / (n*Pb) CMX / CDV = ((20/32768)*131072) / 20 = 4/ 1 QD75每转脉冲数设置AP为32768pulse,每转移动量设置AL为2000um,单位倍率AM 为10倍,所以电机转一圈所需脉冲数为:脉冲当量 = 导程/(减速比*伺服电机 每转一周的定位模块脉冲数。) 本例中脉冲当量 = AL / AP =20/32768 = 0.00061 m m = 0.61 u m。 伺服电机每转一圈需脉冲数 = 20 /(20/32768) = 32768 再次验证公式:伺服侧电子齿轮比CMX/CDV = 电机编码器分辨率 / 电机转一圈 所需脉冲数 131072 / 32768 =4 / 1 = 4 这是由已知量电机编码器分辨率、螺杆导程,然后选的脉冲当量,设置QD75的AP、 AL、AM,然后再算出伺服侧电子齿轮比。
三角L0 * Pt / (n * Pb) = 256 / 15 = 17.066
No = 100000*(256 / 15)*60 / 20480 = 5000 r/min 说明当脉冲当量选0.01mm时,伺服侧电子齿轮比 256 / 15 ,当PLC的最高脉冲 100 000pps,马达的速度是5000 r/min,速度已经超出了3000 r /min,要使用这 样的配置,必须限制PLC的最高脉冲数,限制为50 kpps.马达的转速为2500 r/min.
(以上式子针对的是QD75等脉冲型定位产品,对于QD77MS则没有伺服侧电子 齿轮比一项,相当于说,每转移动量与每转脉冲数、单位倍率就构成了电子齿 轮)。 上述例子说明: 1.每转脉冲数与每转移动量的值可以约分; 2.若设置值超出范围,可以通过伺服侧电子齿轮比以及单位倍率来进行调整。 脉冲当量 = 导程/(减速比*伺服电机每转一周的驱动器脉冲数。) 算出脉冲 当量。(电气定位精度) 脉冲当量需要注意以下几点: (1)脉冲当量也可以自己设定。当自己设定脉冲当量时,注意算一下马达的最 高转速,然后在PLC里限制定位模块发送脉冲的最高速度。以对应马达的额定速 度。f * CMX/CDV = (No/60)*Pt (2)机构的机械特性Pb / Pt。脉冲当量不得小于反馈脉冲当量。比如螺杆导 程10mm,马达编码器分辨率是131072 pulses/r,(尤其是马达分辨率比较低的 时候,要验算这个公式。) 我们设置的脉冲当量需要大于10 / 131072=0.0000762939mm=0.076um, 脉冲当量要大于0.0762um,这是机械特性。无法改变。
A方案:设脉冲当量0.001mm
Байду номын сангаас
CMX / CDV = 三角L0 * Pt / 三角S = CMX / CDV = (0.001 * 20480) / 12 符合电子齿轮比的范围。 f:输入脉冲的频率(pps) No:伺服电机速度(r/min) Pt:电机编码器分辨率(脉冲/转) f * CMX/CDV = (No/60)*Pt
B方案:设脉冲当量0.01mm
CMX / CDV = 三角L0 * Pt / 三角S = CMX / CDV = (0.01 * 20480) / 12 符合电子齿轮比的范围。 f:输入脉冲的频率(pps) No:伺服电机速度(r/min) Pt:电机编码器分辨率(脉冲/转) f * CMX/CDV = (No/60)*Pt
C方案:设脉冲当量0.005mm
CMX / CDV = 三角L0 * Pt / 三角S = CMX / CDV = (0.005 * 20480) / 12 符合电子齿轮比的范围。 f:输入脉冲的频率(pps) No:伺服电机速度(r/min) Pt:电机编码器分辨率(脉冲/转) f * CMX/CDV = (No/60)*Pt
已知:QD75D2控制器,,MR-JE的马达,JE马达编码器分辨率是131072,丝杠螺导 程10mm;设置的参数是:QD75设置:每转脉冲数设置为1pulse,每转移动量设置 为1um,单位倍率为1倍;求MR-JE伺服放大器侧电子齿轮比?/?; CMX / CDV = 三角L0* Pt / 三角S = 三角L0* Pt / (n*Pb) CMX / CDV = 0.001* 131072 / 10 = 8192 / 625 =13.1072 那么根据脉冲当量 = 导程/(减速比 * 伺服电机每转一圈的脉冲数。) 伺服电机每转一圈的脉冲数 = 10 / 0.001= 10000 验算脉冲马达转数,f * CMX/CDV = (No/60)*Pt f * (8192/625)= (3000/60) * 131072 f = 50 * 131072 * 625 / 8192 =500 000, 限制最大脉冲数位500Kpps。QD75里速度限 制值是30000mm/min。
三角L0 * Pt / (n * Pb) = 128 / 75 = 1.7066
No = 100000*(128/75)*60 / 20480 = 500 r/min 当脉冲当量选0.001mm时,伺服侧电子齿轮比128 / 75 ,PLC的最高脉冲 100000pps,马达的速度是500 r/min,没有达到马达的额定速度,速度有点 慢,显然是不能接受的。
3.每转移动量 这个参数设置的是当伺服电机转动一转时,控制对象(比如丝杠)走多少距离。 举个例子,丝杠的螺距是2mm,伺服电机直接带动丝杠,没有减速机,那么伺服 电机转动一转时,丝杠移动量2mm, 所以这里应该设置为2000um(前述提到的“单位设置”应设置为mm) 4.单位倍率 这个参数是当每转移动量超出设置范围时可以作出的调整。 在使用QD75等定位模块时,会发现,每转脉冲数的设置范围是0-65535, 每转移动量则与单位有关,若单位是pulse,则范围是1-65535pulse;若单位是 mm,这范围是0.1-6553.5um。显然,第一,如果用的是JE伺服,那么每转脉冲 数要设置为131072,第二,如果丝杠螺距超过7mm,每转移动量也无法设置。 在QD75里,如果每一脉冲的位移量小于1,则会发生命令频率变化。 较小的设 置会增加变化并可能导致机器振动。 如果每一脉冲的位移量变为小于1,则也 使用驱动装置的电子齿轮功能并进行设置使每一脉冲的位移量大于等于1。 这段话的意思是AL*AM / AP >=1.